
A Reactive and Proactive Approach for Ambient Intelligence
Alencar Machado
1,2
, Daniel Lichtnow
2
, Ana Marilza Pernas
3
,
Leandro Krug Wives
1
and José Palazzo Moreira de Oliveira
1
1
PPGC Instituto de Informática, Universidade Federal do Rio Grande do Sul (UFRGS), Porto Alegre, Brazil
2
Colégio Politécnico, Universidade Federal de Santa Maria (UFSM), Santa Maria, Brazil
3
Centro de Desenvolvimento Tecnológico, Universidade Federal de Pelotas (UFPEL), Pelotas, Brazil
Keywords: Proactive, Reactive, Situation, Context, Event, Ambient Intelligence.
Abstract: Ambient Intelligence provides technology support and assistance to help people in their daily wellbeing.
Equipped with ubiquitous technologies, Ambient Intelligence uses sensors to monitor the environment and
to collect data continuously providing systems with updated information. Ideally, these computer-supported
environments must detect relevant events to forecast future situations and to act proactively to mitigate or
eliminate undesired situations while regarding user’s specific needs. To build a system with reactive and
proactive characteristics in Ambient Intelligence, it is important to allow it to be extensible, predictive and
to incorporate decision-making capabilities. In this sense, the objective of this work is to propose an ap-
proach for providing reactive and proactive behavior in Ambient Intelligence systems. More specifically, we
want to provide Situation as a Service in Ambient Assisted Living. In the present work, we illustrate practi-
cal aspects of the system’s architecture by describing a home-care scenario in which the system is able to
understand the behavior of the user, as the time goes by, and detect relevant (dangerous) situations in order
to act reactively and proactively and help users manage their health condition.
1 INTRODUCTION
In the future it is expected that Ambient Intelligence
(AmI) will enable environments to support people,
being sensitive to their needs and capable of antici-
pating behaviors (Sadri, 2011). Fields such as Ambi-
ent Assisted Living (AAL) (Jara, Zamora and
Skarmeta, 2011) and Smart Homes (Chan et al.,
2008) are emerging as AmI focused on specific
characteristics of the user.
Currently, there is a lack of support for extensi-
ble Ambient Intelligence systems to incorporate
reactive and proactive behavior. In addition, these
systems must (a) manage heterogeneous sources
(sensors and appliances) to provide high level in-
formation such as situations; (b) process events for
detecting situations in the environment; (c) make
predictions of unwanted situations and to react in
advance; (d) determine the policy of actions to con-
sume appropriate services for adapting the environ-
ment ahead the situation envisaged; (e) have expan-
sive capacities to manipulate different situations.
Among these challenges, this paper focusses on
how to process events to detect and predict future
situations. In this sense, we argue that for fulfilling
user needs, AmI systems should be reactive and
proactive. Thus, these systems must be aware of the
user current situation and foresee future situations.
The system must make decisions in advance, taking
into account evidences that demonstrate the possibil-
ity of an unwanted situation happening in the future.
In our approach, the user and his actions are
monitored through sensors that capture environmen-
tal data. This data is used to characterize the user
context, using entities for obtaining a semantic char-
acterization that determines the state of the environ-
ment. In the proposed approach, the state of the en-
vironment is called “situation”.
Thus, when a situation is detected, if necessary,
it is possible to act reactively and proactively on the
environment, using capabilities (services) provided
by electronically controlled devices, seeking to adapt
automatically the environment according to the situ-
ation envisaged.
In our approach the actions of the system are
achieved by using functionalities implemented by
Web services embedded in physical objects such as
mobile phones, televisions and radios.
501
Machado A., Lichtnow D., Marilza Pernas A., Krug Wives L. and Palazzo Moreira de Oliveira J..
A Reactive and Proactive Approach for Ambient Intelligence.
DOI: 10.5220/0004884205010512
In Proceedings of the 16th International Conference on Enterprise Information Systems (ICEIS-2014), pages 501-512
ISBN: 978-989-758-028-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

This work focuses on unwanted situations involving
the lives of elderly people at home. In this context,
systems that foresee and handle unwanted situations
proactively can assist caregivers of users who do not
have physical or cognitive conditions for managing
their own health, because it is necessary to act be-
fore an unwanted situation occurs.
Thus, the approach was applied to a specific
case-based application for managing medicines. In
this case, citizens self-manage their health, and an
application assists this activity. Over time, the citi-
zens are affected by cognitive decline, when they
become unable to manager their medications and the
system must adapt itself to assist caregivers. The aim
is to analyze the user behavior for predicting the
need of some early action to aid them to take their
medications at the right time, preventing a decrease
in their health condition.
This paper is organized as follows. Section 2 dis-
cusses background and related work. Section 3 pre-
sents the proposed reactive and proactive approach.
In Section 4 and 5, presents the case study devel-
oped. Finally, in Section 6, we present and discuss
our conclusions and future works.
2 BACKGROUND AND RELATED
WORK
Ambient intelligence systems need to know the
world around users they monitor and, in order to
perform actions, they need to interact with users
through the devices that surround them (Augusto,
Nakashima and Aghajan, 2009). Therefore, intelli-
gence systems must be context-aware and proactive,
automatically adapting to changes in the environ-
ment and considering user needs, without requir-
ing their personal attention.
Regarding to context-aware systems, the concept
of context must be defined. We adopt the definition
of Ye, Dobson and McKeever (2011), in which con-
text is seen as “the environment in which the system
operates”. Dey and Abowd (1999), however, charac-
terize context as the situation of an entity in an envi-
ronment. In the present work, the context of an envi-
ronment is thus represented by a set of entities that
surround or interact with the user, and their semantic
relations.
As the time goes by, different entities or interac-
tions may be active. In this sense, we need to verify
the current contextual state of the user and act upon
it or on its changes. We thus need to define the con-
cept of situation, since it is used by us to character-
ize the state of the user environment. For instance,
Ye, Stevenson and Dobson (2011) define situation
as the abstraction of the events occurring in the real
world that are derived from the context and hypothe-
ses about how the observed context relates to factors
of interest.
In this sense, applications that deal with situa-
tions are called situation-aware. Awareness implies
vigilance in observing or alertness in drawing infer-
ence from a previous experience, so something is
aware only if it is able to observe some object and
design conclusions through previous observations
(Kokar, Matheus and Baclawski, 2009). Observa-
tions could be made by services provided through
devices, such as sensors. Therefore, by these obser-
vations, it is possible to detected events that change
the state of the environment, characterizing thus a
situation.
Another important concept is the one of event.
According to Etzion and Niblet (2010), an event is
an occurrence within a particular system or domain,
it is something that has happened, or is contemplated
as having happened in that domain. Events can be
modeled as raw and derived. Derived events are
higher-level events in the semantic hierarchy. It
normally corresponds to a pattern of observation.
Raw events are produced by some entity of context
(e.g., sensor). Events can change the state of the
environment, therefore producing new situations.
Works such as SOPRANO (Sixsmith et al.,
2009), PERSONA (Tazari et al., 2010), among oth-
ers, aim at modeling context, events and situations in
middleware systems to provide a platform of health
services in AAL. They propose conceptual models
to transform homes into AAL environments, model-
ing their context and services (Paganelli and Giuli,
2011). SOPRANO, for instance, has the intention of
recognizing facts, objects, and people surrounding
users allowing systems to act more appropriately and
providing support to daily activities. However, in
these works, the system is reactive, since it only acts
after the evidence that an unwanted situation has
occurred. They are not able to provide proactive
actions to mitigate or eliminate undesired situations
in advance.
The term proactive computing was first de-
scribed by Tennehouse (2000), who proposed the
following principles for proactive systems: they
should be closely connected with their surrounding
world; they should also deliver results to humans
before the user action; and they must operate auton-
omously.
The characteristics proposed by Tennehouse turn
systems essentially reactive. In this sense, proactive
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
502

computing overlaps with the term autonomic com-
puting (Want, Pering and Tennenhouse, 2003). An
autonomic system is one that reacts to events that
already happened. Our approach follows the proac-
tivity definition of Engel and Etzion (2011) who
describe proactivity in computing systems as the
ability to mitigate or eliminate undesired future situ-
ations, identifying and taking advantage of future
opportunities by applying prediction and automated
decision making technologies. Thus, the aim of the
system actions is to prevent future unwanted situa-
tions. One example is the work of Fu and Xu (2010)
where event correlations are used for predicting
future failures in networked computing systems.
The current vision of proactive behavior is listed
as the next phase in the evolution of complex event
processing (Etzion and Niblett, 2010). Thus, Engel
and Etzion (2011) and Engel, Etzion and Feldman
(2012) present the Proactive Event-Driven Compu-
ting, proposing the extension of the event processing
conceptual model and including more two types of
agents to the architecture of proactive event-driven
applications: predictive and proactive.
Proactive systems apply prediction methods for
predicting future information and decision making.
Boytsov and Zaslavsky (2011), for instance, analyz-
es and compares prediction methods in order to
identify their benefits and shortcomings. Among
these methods, they describe Bayesian networks as
an appropriate approach for predictive models. Simi-
larly, Nazerfard and Cook (2012) present a se-
quence-based activity prediction approach that uses
Bayesian networks in a two-step process to predict
both activities and their corresponding features.
Lotfi et al. (2012) seek to make prediction of ab-
normal behavior of elderly with partial dementia.
They use sensor data for identifying anomalous sen-
sor behaviors to predict the future values of the pos-
sible data for each sensor. The predicted values are
used to inform a caregiver in the case of anomalous
behavior of sensors in the near future.
To the best of our knowledge, works related to
smart environments propose strictly reactive sys-
tems. We have seen some researches describe proac-
tive behavior to anticipate user's actions, but reacting
only after a situation has happened. For instance, a
system for handling situations of agitations for elder-
ly patients who take actions to anticipate actions of
the caregivers. They, however, do not seek to identi-
fy this situation in advance to avoid it happening.
Besides, in general these proposals do not address or
include extensibility technologies, i.e., are not able
to handle different situations in the course of time.
3 A REACTIVE AND
PROACTIVE APPROACH
Our approach differs from other works because we
present a new reactive and proactive approach that is
more appropriate to attend the proper demands of
AAL systems. Besides, it provides extensibility for
residential smart environments. The approach is
explained taking into account the recent history of
self-management of a citizen’s health, where the
system triggers reactive and proactive actions.
The extensibility aspect of our approach is relat-
ed to the concept of pervasive applications, and is
based in a work named Situation as a Service (SI-
aaS) (Machado et al., 2013), which is described in
the next section. In the present work, we have added
temporal aspects, prediction and decision making
techniques in order to prevent the existence of un-
wanted situations in future (Section 3.2).
3.1 Situation as a Service
In our approach, pervasive applications are installed
in a middleware named SItuation as a Service (SI-
aaS). Pervasive applications (appPerv) are software
applications developed by companies specialized in
specific fields, like health, surveillance, energy.
Designers of appPerv must implement in a concep-
tual model that corresponds to specific situations of
the environment that are relevant to the appPerv.
They also must inform the appPerv context of inter-
est, generating instances of a particular type (e.g.,
Patient, Sensor) and make the linking semantics
among them (as hasSensor).
Therefore, the pervasive application informs the
SIaaS middleware about the situations that are im-
portant and should be managed for the detection and
prediction of situations, as well as a set of contextual
information necessary for decision making.
In this work, we are interested in a specific do-
main: home-care health support. Thus, user could
extend the capabilities of the middleware buying a
complete solution for managing chronic diseases or
only one pervasive application for managing the
schedules of their medicines. For example, the per-
vasive applications described in (Machado et al.,
2013) performs reactive actions (consumption of
services) when a patient’s agitation situation be-
comes true.
The SIaaS manages the environment and pro-
vides the context of interest, as well as the situation
of interest for pervasive applications, so it is possible
decide the more appropriate action when a situation
is detected. It is presented in Figure 1.
AReactiveandProactiveApproachforAmbientIntelligence
503
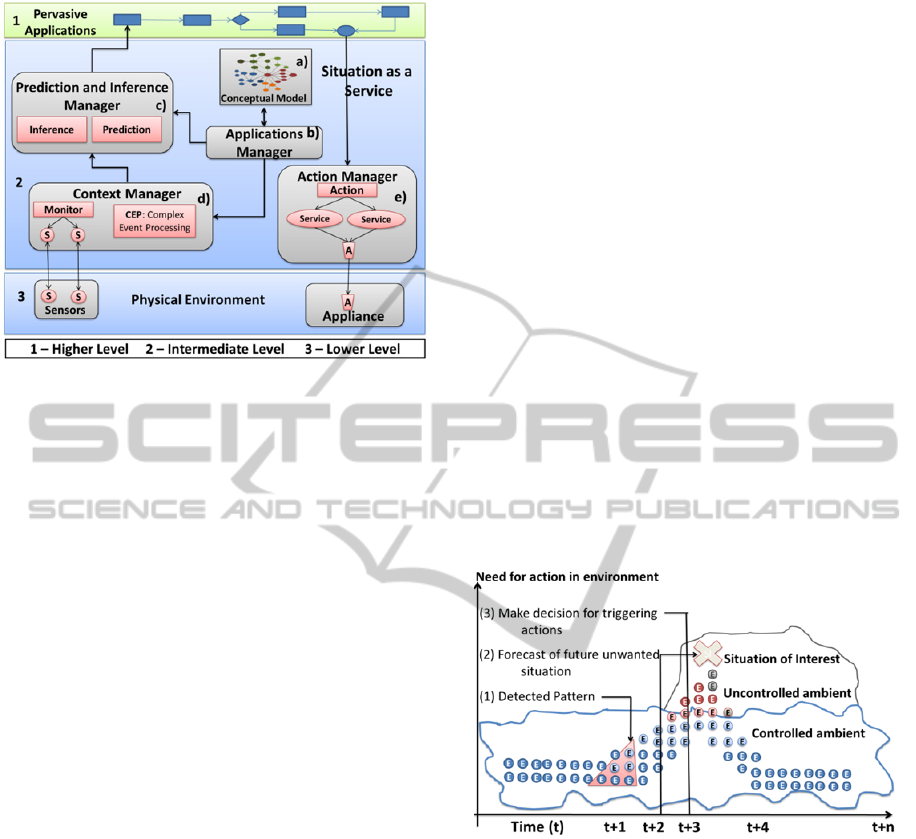
Figure 1: Levels of the architecture.
The SIaaS is a Service-oriented architecture with
complex event processing that is implemented in
three levels: Lower, Intermediate, and Upper. The
Lower Level (3) corresponds to the physical envi-
ronment (i.e., sensors and appliances).
The Intermediate Level (2) contains the middleware
for providing a stable and secure environment for
pervasive applications. It notifies any pervasive
application whenever its situations of interest be-
come true. It comprises a conceptual model, an ap-
plication manager, a prediction and inference man-
ager, a context manager, and a proactive actions
manager. The Upper Level (1) offers a stable com-
puting environment for pervasive applications.
3.2 Proactive Model
A pervasive application has interest in specific situa-
tions that involve users and what happens in their
living environment. This pervasive application has
the knowledge of what kind of reactive actions
should be taken when an unwanted situation hap-
pens. The SIaaS middleware monitors the events
that could generate a situation of interest for any
pervasive application, and notifies it whenever such
situation becomes true. These events occur in time
windows and are related to situations. These situa-
tions are described by pervasive applications that
specify their situations of interest.
Taking into account examples from the health
domain, we consider a scenario where the aim is to
monitor medicine administration. Thus, if the event
“medicine X is not administrated” is detected during
consecutive days, it may result in health problems
for the patient, i.e., an unwanted situation.
The SIaaS must avoid such unwanted situations
(e.g., the patient forgot to take his medicine and
became sicker). For this purpose, the SIaaS initially
learns a predictive model using data provided by the
pervasive application. The pervasive application
data consists on patient’s behavior patterns that will
be managed by the SIaaS. After the learning stage,
the SIaaS can predict situations through events de-
tected in real-time and is able to perform proactive
actions, avoiding the occurrence of unwanted situa-
tion. Consequently, the reactive actions requested by
the pervasive applications will not be executed, be-
cause the events (e.g., patient forgot to take his med-
icine) that would determine the situation will not
occur. In this sense, the SIaaS acts proactively to
prevent an unwanted situation.
As depicted in Figure 2, the environment may be
in two states: controlled or uncontrolled. An event
stream, predefined as normal, characterize a con-
trolled environment where reactive actions are help-
ful. However, if the events are being detected out-
side this predefined state, it could characterize that
the environment will become uncontrolled, thus
increasing the dependency on proactive actions be-
ing performed by the SIaaS.
Figure 2: Environmental states.
In the environment, event streams are constantly
monitored through data made available by sensors.
Still, evaluating the events flow of Figure 2, at t+1 a
pattern of events (provided by the pervasive applica-
tion) is detected (1) by the Context Manager. This
subsystem uses a prediction algorithm to determi-
nate the probability of an unwanted situation becom-
ing true in the user living environment. The Context
Manager has t+2 times to make the prediction, hav-
ing enough time to take corrective actions. After
identifying the probability of the occurrence of a
situation in t+2 (2), the Inference Manager process
the respective rules to determinate if the rate of
probability is relevant. If it is positive, the Proactive
Actions Manager must be activated in t+3 (3) to
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
504

trigger proactive actions. This module is responsible
for choosing the most appropriate policy to consume
appropriate services corresponding to environmental
devices and health care providers.
All these actions are taken in order to bring the
environment to a normal state and to avoid future
unwanted situations. The goal is to return to the
initial streams of events, thereby characterizing the
consistence of the environment.
3.3 Sliding Windows
In the present approach, we consider that it is neces-
sary to analyze a sequence of events for learning and
detecting patterns aiming to predict situations. Be-
sides, we consider that this sequence of events oc-
curs in a period of time, referenced as Sliding Win-
dow, i.e., a valid space of time where situations are
predicted or detected and the relevant decisions are
taken. The Sliding Windows model used in our ap-
proach is adapted from Salfner, Lenk and Malek
(2010). In this model, a sliding can be sized or
timed. A sized sliding window (SSW) has a specific
size that corresponds to the number of events of a
given pattern of interest. For instance, is possible to
use a SSW with the last hundred events that match
specific selection criteria. A timed sliding window
(TSW) has a finite time frame where events of inter-
est are monitored. In this work, only ∆td is modeled
as these two possibilities, the remainders are win-
dows of time, because they are used to model the
window in future for an unwanted situation.
Figure 3: Sliding Windows.
Figure 3 presents a sliding window associated
with a real time proactive behavior. At time t, the
possibility of occurrence of a situation can be pre-
dicted with some time in advance. This period of
time is called prediction time (∆tpr) and is based on
the events currently detected in the environment.
Situations are predicted in ∆tpr, which uses a size or
time sliding window (∆td) that corresponds to the
event stream monitored by the system. These timed
or sized windows (∆td) are used to perform predic-
tion. We assume that proactive actions are valid for
some period of time, named period of proactivity
(∆tp). In this time window, triggered actions can
change predicted situations, which are expected to
occur in the reaction time (∆tr). If ∆tpr > ∆tp then
there will not be enough time for all proactive ac-
tions to be triggered before the predicted situation
(i.e., an unwanted situation) becoming true. Thus,
∆tr is the maximum time the system has to react,
since ∆tr is the time estimated to the situation to
occur. Then, ∆tr is the period where reactive actions,
related to a specific unwanted situation, are trig-
gered.
3.4 Event and Situation Model
In this work, the semantic relations {R} that form
the context are represented by triples ‹Es, p, Eo›
where the subject Es and the object Eo represent
instances of entities of the environment, which could
belong to the same domain or not. Similarly, as for-
malized by Ye, Stevenson and Dobson (2011), p
represents a context predicate that encapsulates two
entities of context in a relation. For instance, in the
relation ‹John, hasSensor, RFID› John and RFID
represent entities. Subjects and objects can also be
represented by variables in reasoning rules. For ex-
ample, in the following triple, ‹x, hasSensor, y›, x
represents any entity instantiated in the user domain
and y represents any entity instantiated in the sensor
domain. In this example, any pair of values of User
and Sensor, related by the relationship
hasSensor
,
can validate this context predicate.
Figure 4: Conceptual model.
Figure 4 depicts the conceptual model of our ap-
proach. The Activity entity represents daily activities
performed by the citizen in his home, like breakfast-
ing, watching television, taking medicine or doing
exercises. The activities are made up of human ac-
tions, for instance the activity to take medicine is
composed by picking up a glass with water and tak-
ing the drug, represented by the semantic relations
presented below (1).
AReactiveandProactiveApproachforAmbientIntelligence
505

‹John, catch, glass› ∧ ‹glass, has,
water› ∧ ‹John, obtain, drug› ∧
‹John, take, drug› ⇒
‹John, took, medicine›
(1)
Besides human actions, we also take into account
automated actions taken by the system. For instance,
the system may notify the citizen through an audible
warning using some device (we consider that auto-
mated actions are actions performed by devices).
Thus, actions are carried out by an agent (human or
device) in order to achieve a goal. When an action
either achieves or not its goal, it can generate events.
In our approach, we take into account internal
and external events, which are defined in the theory
of Situation Calculus (Mccarthy, 2002). An external
event is generated externally by human actions or by
interacting with pervasive applications. In addition,
external events can be generated by changing a user
device or by changing the network connection used
by a device. Internal events are generated internally
by the system and are represented by assertions that
can be given by an axiom. An internal event could
be generated by an automated action, the detection
of successive state variable changes, or by the modi-
fication of one specific state variable. Thus, as more
human actions are transferred to automated actions,
more extensible the system becomes. Events are
represented by the following syntax (2).
Event: (name, type, time, {R}, p) (2)
An event has a name and is characterized by a
type (internal or external), a time (timestamp) within
∆td windows and a set of contextual semantic rela-
tions {R}. When the event is not produced by a sin-
gle entity (e.g., raw data sensor), it may also have a
detection pattern (p). Events can be linked to one or
more contexts; for instance, a pattern that defines
that an event must be detected if a specific sequence
of events happens within a given sliding window of
time or size involving the “user” in his/her living
room. In this work, events can determine the evi-
dence of the beginning and the ending of a situation.
Thus, events change the state of the environment and
characterize a new situation. The current situation is
represented by the following syntax (3).
Cs: (name, Ie, {a}, Fe) (3)
As shown in (2), the current situation (Cs) has a
name and a set of events that characterize its begin-
ning (Ie) and ending (Fe), and the time attribute of
these events that characterize the valid time window
of this situation, which will always be in ∆tr. In
addition, the current situation has a set of triggered
reactive actions {a} that were detected during a
valid time for handling the current situation. For
instance, below we present how to represent an
event (Ie) that initiates the “unmedicated” situation
(4), its corresponding final event (Fe
) and the ac-
tions to be performed in this situation.
name unmedicated
(4)
Ie
‹John, shouldTake, Drug X› ∧
‹Medicine X, timeToAdminister, 10h›
∧ ‹currentTime, equals, 10:30›
⇒‹John, notTake, medicine›
⇒‹John,isSituationOf,{unmedicated}›
{a}
‹System, trigger, audibleWarning›
‹System, trigger, visualWarning›
‹System, notify, Caregiver›
Fe
‹John, catch, glass› ∧ ‹glass, has,
water› ∧ ‹John, obtain, drug› ∧
‹John, take, drug› ∧ ‹John, on-
Click, appPerv› ⇒ ‹John, take,
medicine›
⇒‹John, isSituationOf, {medicated}›
The event evaluation can lead the system to find
out that an unwanted situation has a probability of
happening in the future. In (5) we show that a Pre-
dictive Situation (Ps) is characterized by a set of
events; a set of patterns (p), which describes some
form of correlation among events that shape this
situation, the probability value (pr) of its occurrence
in a context in the future; and a timestamp (time)
during which it may occur within ∆tr.
Ps: (name, {event}, {p}, pr, time) (5)
For example, if a sensor detects smoke in a house
and another one detects a gas leak, then it will be
characterized as a dangerous situation. This demon-
strates how occurring events can influence the prob-
ability of a predicted situation (the prediction of a
situation is addressed in the next section). Thus,
proactive actions are needed to react to the possibil-
ity of a future unwanted situation. In the next section
we show the model for performing reactive and
proactive prediction for deciding what action must
be triggered in such cases.
3.5 Prediction for Decision Making
Our predictive model is hybrid, since we intend to
use an inference engine to process inference rules
and infer that a current situation is occurring and a
Bayesian network to determinate the probability of
situations occurring in the near future.
In this sense, the Bayesian network is used in or-
der to estimate the probability of a situation occur-
ring in the future. To determine whether a probabil-
ity is relevant, predetermined rules (which are not
processed through inference), provided by pervasive
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
506
applications, are needed, thus determining whether
some probability is relevant for activating the Proac-
tive Actions Manager.
However, to build the Bayesian network, it is
necessary the knowledge of an expert in the applica-
tion domain to indicate which events can produce a
situation. In this sense it is assumed that the perva-
sive application is provided with rules defined pre-
viously by an expert in the specific domain of
health.
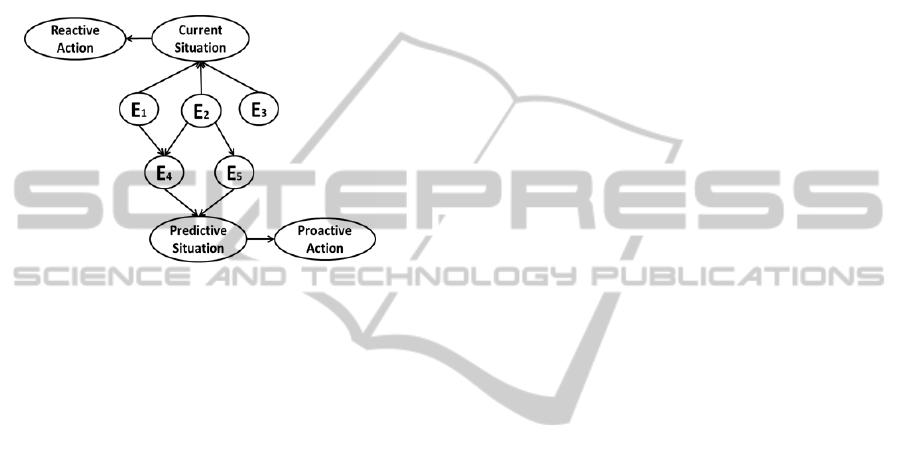
Figure 5: Proactive and Reactive Network.
Figure 5 shows the structure of the Bayesian
network developed in our approach. In this model,
we consider that the cause (event) precedes the ef-
fect (situation), the events are independent variables
of each other, and a situation is represented in a leaf
node.
This network has two facets, reactive and proac-
tive. In the reactive approach, the presence of events
is the cause for the evidence of the current situation.
In this case, if all of the events that characterize a
situation are detected in the environment, we can
process inference rules to detect if the situation is
ongoing, and thus requires reactive actions.
For instance, in (6), if events e1, e2 and e3 were
modeled on the network as the precedents of the
situation s1 and these events where detected in this
sequence, it would be possible to infer (reactive
side) that s1 is the current situation.
IF sequence ‹e1, e2, e3›
⇒‹John, isSituationOf,{medicated}›
(6)
In the proactive approach, the presence of these
events is used by the Bayesian network to calculate
the probabilities of the predictive situation. Conse-
quently, if this probability characterizes a future
unwanted situation, proactive actions are needed.
These values are calculated by Pr:(Ps|pa(Ps)),
which indicates the conditional probability of a pre-
dictive situation (Ps) occurring due to its relation-
ship with the parent events pa(Ps).
In our approach, every pervasive application in-
stalled on the SIaaS describe (through OWL files) a
set of relevant events and how these events influence
(qualitative part of the network Bayesian) each situa-
tion. Wok such as Lukasiewicz and Straccia (2008)
detail how to model Bayesian networks through
Semantic Web technologies. Therefore, the SIaaS
builds a network to such pervasive application, iso-
lating this network from others to be able to manage
the specific network model that is of interest for a
given application.
However, to avoid the system necessity of acti-
vating the reactive model some time before the net-
work computes the probability of each event (quanti-
tative part) for the predictive situation, we assume
that the pervasive application provides data for the
initialization of the network through a supervised
learning process.
After the learning phase, the network enters into
a production state and is dynamically updated with
information about the events detected by the system.
Two process are constantly running on the network:
belief update and belief revision. The belief update
is the upgrade of the network due to updated events,
thus we update the Conditional Probability Table
(CPT) of the network, whereas belief revision makes
a belief assessment query, referring to updating the
probability value within the predictive situation.
Beyond that, the rules (not processed by inference)
are constantly processed to identify if the probability
value calculated by the network is relevant for a
predictive situation. According to that identification,
proactive actions are triggered. An example of a
proactive action rule is presented in (7).
I
F ‹predictiveSituation, greatherThan,
86%› ⇒‹emergencySituation, in, 10min›
(7)
Rules identify the specific time in which a pre-
dictive situation is expected to occur within ∆tr.
Such rules describe complex temporal predicates
based on what the processing is carried out. These
rules are associated with a set of actions. These ac-
tions, when consequently fired, result in new internal
events (as described in Section 3.4), which feed into
the network again and update the attribute probabil-
ity of the predictive situation. Thus, through the set
of actions, the SIaaS has the purpose of eliminating
the occurrence of unwanted events (i.e., the cause of
the situation) and consequently decreasing the prob-
ability value of the predictive situation.
The decision to perform an action (i.e., the ac-
tions policies) depends on the detected situation
(current or future). The actions policies are provided
together with their corresponding pervasive applica-
tions for SIaaS. These policies are defined by the
developers of the pervasive applications with the
AReactiveandProactiveApproachforAmbientIntelligence
507

help of health experts. Experts help is necessary
because these pervasive applications are related to
the domain of health.
This is the technique used to generate the cost of
taking the action changing over time. When unwant-
ed events stop being detected, we characterize those
actions as having the desired effect, thus acting as a
reward value.
4 CASE STUDY SCENARIO
This case study aims to demonstrate the use of our
approach in a scenario where the necessity of a
mechanism that acts in proactive way is emphasized.
The scenario is related to the aforementioned
self-administration of medicines by patients in their
homes. The aim is to identify when patients are no
longer able to control their own medication.
In this sense, we are considering that patients, in
general, will take their medicine in a stipulated peri-
od of time or after an action system (e.g., using func-
tionalities (services) of devices of the environment
to remember the patient about the medication).
However, some patients can have cognitive decline
over time, compromising the self-management of
their health condition, thus needing help to take the
medication at the correct time. In this scenario, the
situation known as "unmedicated" becomes habitual,
and reactive/proactive actions are necessary to con-
trol this situation, considering the recent history of
self-management of citizen's health, thus assisting
the patient to take his medicine in the best possible
way. We considered a pervasive application de-
ployed in the SIaaS to help patients in the described
scenario. For the implementation, we have used the
monitoring component Esper (2010), the Bayesian
tool Netica (2013), which provided an API that we
used to create the Bayesian network that was insert-
ed into the Context Manager. In addition Jess
(Friedman-Hill, 2003) was used to build Java soft-
ware process able to perform inference rules in the
Inference Manager module.
For the case study, the following fictitious sce-
nario was considered for describing the approach
supported by the decision making process imple-
mented by the pervasive application. Imagine ‘Ms.
Smith’, a 70 years old citizen who has some aging
associated diseases such as diabetes, hypertension
and lightweight dementia. Ms. Smith’s home is an
intelligent environment managed by a SIaaS mid-
dleware, where a number of pervasive applications
are installed. An example is the pervasive applica-
tion for managing medications (appPervMed).
Ms. Smith initially controls the medication herself.
However, as any ordinary person, sometimes, to be
involved in some particular activity, she forgets to
take or takes her medicines late, which puts her in an
"unmedicated" situation. In these cases, the ap-
pPervMed requests to the SIaaS middleware to trig-
ger an audible or visual warning through devices
located near Ms. Smith. Whenever a warning reach-
es her attention, she can interact with the system
through a smart phone or smart TV to report explic-
itly that she took her medication. After that interac-
tion, the system will close (finish) the “unmedicat-
ed” situation.
After some stipulated time, if Ms. Smith does not
take her medication, the system sends a warning to
her caregiver. It warns her caregiver that Ms. Smith
had not taken her medicine, thus placing the respon-
sibility of interacting with the SIaaS on the caregiv-
er. Once the caregiver gives her the medicine, and
informs the system about that, the appPervMed will
know that Ms. Smith took the medicine and will
determine the end of the "unmedicated" situation.
Eventually, the caregiver himself may forget or
may be not close to any device that could warn him
about the moment that Ms. Smith must be medicat-
ed. Thus, the event “medicine X not taken” is de-
tected, corresponding again to the beginning of the
situation of “Ms. Smith is unmedicated”. Audible
and visual warnings are generated in different mo-
ments in the environment, and, after some parame-
terized time, the caregiver is warned. The ap-
pPervMed waits for a notification that Ms. Smith
took the medication by the caregiver. If it is not
notified in a specific period, the appPervMed trig-
gers a warning directly to the healthcare provider
(consuming a specific Web service), placing the
responsibility on the healthcare provider to make
Ms. Smith taking her medicine, and, once taken, it
ends the situation.
As explained, alerting the caregiver is an excep-
tion. However, after some time, if Ms. Smith takes
her medicine only after a system warning to her
caregiver and if this behavior becomes more usual,
this behavior may indicate a cognitive decline of Ms.
Smith.
Thus, it is necessary to identify (in a proactive
way) when the cognitive impairment happens, be-
cause if this identification does not happens fast, the
treatment will be harmed by the administration of
drugs in wrong times. This moment may character-
ize the end of the patient's ability to medicate her-
self, requiring the caregiver to this function. There-
fore, the system must adapt itself and assist the care-
giver in his task of assisting Ms. Smith.
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
508

5 APPLYING THE APPROACH
TO THE CASE STUDY
The scenario described before shows that a perva-
sive application must react to an event (Ms. Smith
did not take her medication) that characterize the
unmedicated situation and also must forecast some
situation (e.g., Ms. Smith will not take her medica-
tion without her caregiver help) and be proactive.
Next, following our approach, we show how a
pervasive application should work either reactively
and proactively.
5.1 Reactive Behavior
The events related to this case study that are relevant
to the appPervMed are described here, as proposed
in Section 3.4. For performing this task we used the
Semantic Web Rule Language (SWRL), using the
already defined semantic relations {R} and triplets in
the form ‹Es, p, Eo›, as presented in Section 3.4. The
patterns to detect events were modeled as Esper
statements. The variables were replaced to the val-
ues used in the scenario to provide an easier inter-
pretation.
Event name: ea1
Description: Not took the medicine
Typed: Internal
{R
}: ‹Ms. Smith, needToTake, Drug X› ∧
‹Drug X, timeToAdminister, 10h› ∧
‹currentTime, is, 10:15›
⇒‹Ms. Smith, notTaken, medicine›
Pattern
SELECT e FROM PATTERN[
every e=Event(name ='ea1') ->
(timer:at(*/15,10:00,*,*,*)
and not Event(name ='ea2'))]
In this rule, timer:at is an expression of a spe-
cific time that turns true. The syntax is timer:at
(minutes, hours, days of month, months, days of
week, seconds) (Esper, 2010).
Event name: ea2
Description: Took medicine
Typed: External
{R}:
‹Ms. Smith, medicationTime, Drug X› ∧
‹doorMedicineChest, wasOpenedBy, Ms.
Smith› ∧ ‹Ms. Smith, pressedOKButton,
appPervMed›⇒‹ Ms. Smith, took, medicine›
Pattern: SELECT e From e=Event(name='ea2')
Event name: ea3
Description: Took medicine after some action
Typed: External
{R}: the same semantic relations of ea2
Pattern
SELECT e FROM PATTERN[
every e=Event(name ='ea3')->
(Event(name ='ea1') ->
(Event(name = 'a1') or
Event(name = 'a2') or
Event(name = 'a3') or
Event(name = 'a4')))]
Event name: a1
Description: Audible warning after 10 min of ea1
Typed: Internal
{R}:
‹appPervMed, trigger, audibleService›
Pattern
SELECT e FROM PATTERN[
every e=Event(name='a1')->
(timer:at(*/25,10:00,*,*,*)
and Event(name ='ea1'))]
Event name: a2
Description: Visual warning after 25 min of ea1
Typed: Internal
{R}:
‹appPervMed, trigger, visualService›
Pattern
SELECT e FROM PATTERN[
every e=Event(name ='a2') ->
(timer:at(*/40,10:00,*,*,*)
and Event(name ='ea1'))]
Event name: a3
Description: Notify caregiver after 45 min of ea1
Typed: Internal
{R}:
‹appPervMed, notify, Caregiver›
Pattern
SELECT e FROM PATTERN[
every e=Event(name ='a3') ->
(timer:at(*,11:00,*,*,*)
and Event(name ='ea1'))]
Event name: a4
Description: Notify health provider after 2h of ea1
Typed: Internal
{R}:
‹appPervMed, notify, HealthProvider›
Pattern
SELECT e FROM PATTERN[
every e=Event(name ='a4') ->
(timer:at(*/10,12:00,*,*,*)
and Event(name ='ea1'))]
As presented above, if event ea2 is detected, Ms.
Smith is in the situation of “medicated”. Therefore,
the appPervMed is not started because the situation
“unmedicated” did not happen. The internal and
external events and relevant actions that determine
each situation are presented below:
Current Situation
name = unmedicated;
Ie = ea1
{a} = a1, a2, a3, a4
Fe = ea3
Name = medicated;
Ie = ea2
{a} = -
Fe = ea1
AReactiveandProactiveApproachforAmbientIntelligence
509

If Ms. Smith does not take the medicine (event
ea1 was detected) the “unmedicated” situation is
initiated and appPervMed chooses the reactive ac-
tion to be triggered. After the detection of the event
ea1, appPervMed waits for 10 minutes and, if an
event ea2 was not detected, it will trigger an audible
warning (a1). After the audible warning, the applica-
tion needs to wait for a feedback. If this feedback is
not received, appPervMed triggers a2 to produce
some visual warning. Thus, appPervMed terminate
its execution when the resulting feedback is ea3 (i.e.,
took medicine after some action).
5.2 Proactive Behavior
This section presents the proactive behavior of the
SIaaS, showing how it would preventing Ms. Smith
from entering in an “unmedicated” situation. Initial-
ly, it makes a historical analysis of the situations
generated by the events detected that are relevant for
appPervMed.
Below, we present a historical situation (HS) that
has happened and the reactive actions triggered for
manipulating this situation.
:
:
= {a1} (1)
:
:
= {-} (2)
:
:
= {a1, a2} (3)
:
:
= {a1, a2} (4)
:
:
= {a1, a2, a3} (5)
:
:
= {a1, a2, a3} (6)
... (n)
:
:
= {a1, a2, a3} (n+1)
:
:
= {a1, a2, a3, a4} (n+2)
:
:
= {-} (n+3)
This representation is based in a notation pro-
posed by Wasserkrug, Gal and Etzion (2005), which
shows the initial and final time of the situation. In
this case, curly brackets represent the actions trig-
gered during the period of time when the situation
was valid. For instance, the first event ea1 was de-
tected at 10:15 (1), and the situation was finalized
when the event ea3 was detected at 10:23 and the
action a1 was triggered. In (2), Ms. Smith took the
medicine on the right time (10:00), so, no reactive
action was triggered.
This historical data of behavioral management of
medicines by Ms. Smith shows the sequence of ac-
tions that were needed to handle the unwanted “un-
medicated” situation. This HS is used to generate the
Conditional Probability Table (CPT) for each node
event of the Bayesian network. In this case study,
the generation of the CPT must be sensible to a cog-
nitive decline, so the Bayesian network cannot be
established with all the stored history of that situa-
tion. In order to identify a cognitive decline, the
system needs to build a valid sliding window with an
event stream of ∆td (which was described in Section
3.3) that corresponds to the current behavior of Ms.
Smith. Therefore, the appPervMed will register in
the Module Monitor (Esper) of the Context Manager
only the patterns that correspond to the sliding win-
dow used to calculate the network CPT represented
in (8).
select e from pattern
(8)
[every e=Event].win:length(45)
where e.name='ea1' or e.name='a1' or
name='a2' or name='a3' or name='a4'
In the previous pattern, which was deployed in
Esper, we have defined a sliding window of ∆td
corresponding to the last 45 times in which Ms.
Smith had not taken her medicine (event ea1), as
well as the actions that were detected after that situa-
tion had happened. In this pattern, if Ms. Smith
should take a medication once a day, this window
would correspond to 45 days. Thus, the value of the
probabilistic predictive situation always will be set
to a percentage that corresponds to 45 days. In this
sense, we avoid network scalability problems related
to the excessive number of events (since they are
modeled as nodes in the network), and detect cogni-
tive declines with periods less than 45 days. This
pattern generates the sequence of events that con-
stantly updates the Bayesian network and the values
of the probability of the event that determines the
beginning of unwanted situations of this kind.
Figure 6: appPervMed Bayesian network.
As Figure 6 shows, event ea1 is the cause of the
“unmedicated” situation. This event, as well as
events a1, a2, a3, a4, also influences event ea3.
Besides, ea2 and ea3 influence the fact of Ms. Smith
being medicated or not. The probability of Ms.
Smith not taking her medicine at the correct time is
63.4%, according to the simulated behavior.
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
510

Based on this data, the SIaaS will update the
probability attribute of the corresponding predictive
situation for this case, as shown below:
Predictive Situation:
name = unmedicated;
{event} = {ea1, ea3, a1, a2, a3, a4};
{p} = ea1;
pr = 63.4%;
time = ea1.drug.timeTakeDrug;
The value of time is extracted by navigating
through the event ea1 and following to the entity of
context drug and attribute time to take the medicine
(timeTakeDrug) this entity of context. The ap-
pPervMed thus registers the following rule (9) that
shows the relevance of the prediction value.
IF ‹unmedicated.pr, greather-
Than,60%›
⇒‹Ms. Smith, isUnmedicatedIn,
ea1.drug.timeTakeDrug›
(9)
This rule demonstrates that the “unmedicated”
situation could happen the next time that Ms. Smith
needs to take the medicine, activating the Proactive
Actions Manager (PAM). The PAM uses the Bayes-
ian network to identify, among the triggered actions,
which one had the greatest influence for ea3 to be
detected and ending the “unmedicated” situation of
Ms. Smith. It gives more relevance to the actions
that were followed by ea3 (i.e., took medicine after
some action). If there is a sequence of actions trig-
gered after the detection of an unwanted situation
(corresponding by ea1), the PAM will chose the last
action as being responsible for the ending of the
unwanted situation (i.e., ea3 detected).
Figure 6 shows that the action a3 (notify the
caregiver) was the most successful action at this
moment, thus the PAM changes the policy of trig-
gering actions to a3 from “notify caregiver after 45
min of ea1” to “notify caregiver BEFORE 45 min of
ea1”. Thus, the SIaaS will warn the caregiver that
he/she has to ensure that Ms. Smith will take the
medicine at the right time. In this case, the ap-
pPervMed will not be triggered to perform a reactive
action, because event ea1 will not happen. This be-
havior causes more events of type ea2 to be detected
since Ms. Smith starts taking her medicine at the
right time, so consequently the situation “unmedi-
cated” will not happen and the probability of the
Bayesian Network for being medicated (ea2) in-
creases.
We assume that there is a parameterized value
with the criteria of policy selection actions to update
the triggering order of proactive actions after this
rule be updated. This will avoid that an action, after
being identified as most effective, be always chosen
as a proactive action that should be executed forever.
This calibration is necessary because, in this case
study, we are monitoring the behavior of a person,
and this behavior may change over time. In the ex-
ample given, Ms. Smith could not respond to the
warnings of the SIaaS for some period of time be-
cause she was unmotivated with the treatment, so the
warnings to the caregiver would effectively make
her taking her medicine. However, if she did not
show cognitive decline, she could return to her self-
health management without requiring the notifica-
tion of the caregiver. Therefore, there is a need for
policies that trigger proactive actions to be updated.
So, the SIaaS will again generate warnings to Ms.
Smith.
6 CONCLUSIONS
Most of the research efforts in situation awareness
for AAL are generally related to the detection of
situations and the immediate reaction for these situa-
tions. In this sense, we have demonstrated the neces-
sity of mechanisms to act proactivity in order to
avoid unwanted situations in AAL.
In addition, we consider that for an Ambient In-
telligence application to act proactively it must have
learning capabilities. Therefore, these applications
must understand and learn from the events that hap-
pened, predicting situations of interest and making
decisions in advance related to the user needs. Thus,
we consider the use of a Bayesian Network for iden-
tifying when it is necessary to act in a changed way.
In this paper, we presented an approach for ena-
bling smart environments with reactive and proac-
tive characteristics, more specifically in AAL. The
main contributions of our approach are: (i) a method
for supporting extensibility in systems to Ambient
Assisted Living by including experts experience
while modeling pervasive applications; (ii) an ap-
proach for handling reactive and proactive behav-
iors; and (iii) a model of sliding windows for model-
ling time in complex event processing.
The next steps of this research include (i) finish-
ing an application prototype; (ii) testing the situation
prediction over a real world automated environment;
(iii) improving aspects related to the prediction
model; and (iv) adapting the predictive model for
taking decisions in a dynamic Bayesian network.
AReactiveandProactiveApproachforAmbientIntelligence
511

REFERENCES
Augusto, J. C., Nakashima, H., Aghajan, H., 2009. Ambi-
ent intelligence and smart environments: a state of the
art. In: Handbook of ambient intelligence and smart
environments: part 1. New York: Springer. pp. 3–31.
Boytsov, A., Zaslavsky, A., 2011. Context prediction in
pervasive computing systems: Achievements and chal-
lenges. In: Supporting Real Time Decision Making,
ser. Annals of Information Systems, Springer, vol. 13,
pp. 35-63.
Dey, A., Abowd, G., 1999. The context toolkit: Aiding the
development of context-enabled applications. In: Proc.
of the SIGCHI conference on Human factors in com-
puting systems, Pittsburgh, Pennsylvania, US, pp. 434-
441.
Chan, M., Esteve, D., Escriba, C., Campo, E., 2008. A
review of smart homes—present state and future chal-
lenges. Comp Computer Methods and Programs in Bi-
omedicine, vol. 91, no. 1, pp.55-81.
Etzion, O., Niblett, P., 2010. Event Processing in Action.
Manning Publications Co.
Engel, Y., Etzion, O., 2011. Towards proactive event-
driven computing. In: Proceedings of the 5th ACM in-
ternational conference on Distributed event-based sys-
tem, pp. 125-136.
Engel, Y., Etzion, O., Feldman, Z., 2012. A basic model
for proactive event-driven computing. In: Proc. 6th
ACM International Conference on Distributed Event-
Based Systems, pp.107-118.
Esper, 2010. Complex Event Processing. Espertech event
stream intelligence, http://esper.codehaus.org/.
Friedman-Hill, E., 2003. Jess in Action: Java Rule-based
Systems, Manning Publications Company,
http://herzberg.ca.sandia.gov/jess/.
Fu, S., Xu, C., 2010. Quantifying event correlations for
proactive failure management. In: Networked compu-
ting systems. Journal of Parallel and Distributed Com-
puting, vol. 70, no. 11, pp. 1100–1109.
Jara, A. J., Zamora, M. A., Skarmeta, A. F. G., 2011. An
internet of things based personal device for diabetes
therapy management in Ambient Assisted Living
(AAL). Pers Ubiquit Comput. vol. 15, no. 4, pp. 431–
440.
Kokar, M. M., Matheus, C. J., Baclawski, K., 2009. On-
tology-based situation awareness. In: Journal of In-
formation Fusion. vol. 10, no. 1, pp. 83–98.
Lotfi, A., Langensiepen, C., Mahmoud, S. M., Akhlagh-
inia M. J., 2012. Smart homes for the elderly dementia
sufferers: Identification and prediction of abnormal
behavior. In: Journal of Ambient Intelligence and Hu-
manized Computing, vol. 3, no. 3, pp. 205–218.
Lukasiewicz, T., Straccia, U., 2008. Managing uncertainty
and vagueness in Description Logics for the Semantic
Web. In: Journal of Web Semantics vol. 6, no. 4, pp.
291-308.
Machado, A., Pernas, A. M., Augustin, I., Thom, L. H.,
Krug, L., Palazzo, J., Oliveira, M. De, 2013. Situation-
awareness as a Key for Proactive Actions in Ambient
Assisted Living. In: Proc. of the 15th International
Conference on Enterprise Information, pp. 418–426.
Mccarthy, J., 2002. Actions and Other Events in Situation
Calculus. In: Proceedings of the 8th International Con-
ference on Principles of Knowledge Representation
and Reasoning. Morgan Kaufmann Publishers, Tou-
louse, pp. 615– 628.
Nazerfard, E., Cook, DJ, 2012. Bayesian Networks Struc-
ture Learning for Activity Prediction in Smart
Homes. In: 8th International Conference on Intelligent
Environments (IE), pp.50-56.
Netica, accessed in 2013. https://www.norsys.com/
netica.html.
Paganelli, F., Giuli, D., 2011. An ontology-based system
for context-aware and configurable services to support
home-based continuous care. In: IEEE Trans. Inf.
Technol Biomed, vol. 15, no. 2, pp. 324-333.
Sadri, F., 2011. Ambient Intelligence: A survey. In: ACM
Computer. vol. 43, no. 4, pp. 1-66.
Salfner, F., Lenk, M., Malek, M., 2010. A survey of online
failure prediction methods. In: ACM Computing Sur-
veys. vol. 42, no. 3, pp. 10–42.
Sixsmith, A., Meuller, S., Lull, F., Klein, M., Bierhoff, I.,
Delaney, S., Savage, R., 2009. SOPRANO: An Ambi-
ent Assisted Living System for Supporting Older Peo-
ple at Home. In: Lecture Notes in Computer Science.
Springer Berlin: Heidelberg, vol. 5597, pp. 233–236.
Tazari, M.R.., Furfari, F., Lazaro, Ramos J.P., Ferro, E.,
2010. The PERSONA Service Platform for AAL
Spaces. In: Nakashima, H. et al. (eds.) Handbook of
Ambient Intelligence and Smart Environments,
Springer, Heidelberg, pp. 1171–1199.
Tennenhouse, D. L., 2000. Proactive computing. In:
Communications of the ACM, vol. 43, no. 5, pp. 43–
50.
Want, R., Pering, T., Tennenhouse, D. L., 2003. Compar-
ing autonomic and proactive computing. In: IBM Sys-
tems Journal (IBMSJ), vol. 42, no. 1, pp. 129–135.
Wasserkrug, S., Gal, A., Etzion, O., 2005. A model for
reasoning with uncertain rules in event composition
systems. In: Proceedings of the 21st Annual Confer-
ence on Uncertainty in Artificial Intelligence, pp. 599-
606.
Ye, J., Stevenson, G., Dobson, S., 2011. A top-level on-
tology for smart environments. In: Pervasive and Mo-
bile Computing. vol. 7, no. 3, pp. 359-378.
Ye, J., Dobson, S., McKeever, S., 2011. Situation Identifi-
cation techniques in pervasive computing: a review.
In: Pervasive and Mobile Computing. vol. 8, no. 1, pp.
36-66.
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
512
