
What Could a Body Tell a Social Robot that It Does Not Know?
Dennis Küster
and Arvid Kappas
School of Humanities and Social Sciences, Jacobs University Bremen, Campus Ring 1, 28759 Bremen, Germany
Keywords: Social Robots, Psychophysiology, Emotion, Measurement, Taxonomy.
Abstract: Humans are extremely efficient in interacting with each other. They not only follow goals to exchange
information, but modulate the interaction based on nonverbal cues, knowledge about situational context, and
person information in real time. What comes so easy to humans poses a formidable challenge for artificial
systems, such as social robots. Providing such systems with sophisticated sensor data that includes
expressive behavior and physiological changes of their interaction partner holds much promise, but there is
also reason to be skeptical. We will discuss issues of specificity and stability of responses with view to
different levels of context.
1 INTRODUCTION
Early models of human communication were driven
by the notion that information is encoded, sent as a
message, and decoded on the receiver side. In other
words, all the action is happening in the message. If
it is well encoded, everything the receiver needs to
know is contained and a successful decoding
completes a felicitous communication episode
(Rosengren, 2000). This of course conjures up the
notion of a complete encapsulation in packages of
speech that efficiently transport information from
one person to another. We now know that this is not
how human communication works. Not only, are
verbal messages augmented by information
transported via multiple nonverbal channels, but also
the personal context of all participating individuals,
as well as the situational context, play an important
role in connecting interactants. When it comes to the
communication of emotion, one also has to consider
that a considerable amount of information is
transmitted outside of conscious awareness, for
example via mirror and feedback processes that are
difficult to describe and assess. It is this complexity
that makes it often enough difficult for humans to
communicate successfully, but the challenge of
creating artificial systems that succeed is at times
daunting.
Consider three examples:
Jill: “Could you pass the butter?” – John
passes the butter
(1)
Jill: “It is cold in here” – John closes the
window
(2)
John: “I am sorry, I forgot our anniversary”
– Jill is silent
(3)
The first example is straight-forward; a demand is
articulated. It is relatively easy to grasp what is
intended, and a particular act, passing the butter,
would appear to be the appropriate response. This is
relatively easy to model and artificial service
systems would not have difficulties in dealing with
requests like this. The second example is somewhat
more complicated. Jill simply utters a statement.
However, based on speech act theory (e.g., Searle,
1976), we can assume that any statement can imply
a variety of things – for example, in a particular
situational context it might become clear that Jill is
actually uncomfortable because of the low
temperature – even if she did not state this explicitly.
There is, depending on the relationship between Jill
and John, the implicit message that Jill is not well,
but that John has the power to change this state via
closing the window. By not stating the request
explicitly there is much information conveyed
regarding the relationship of the two. This scenario
is more complicated for an artificial system to deal
with. However, what if there were signs that Jill was
indeed not well? She might shiver. If an artificial
system would have access to the shivering then a) it
could already react before something was said, or b)
the sentence could be interpreted in the context of a
physiological/behavioral piece of information. The
358
Küster D. and Kappas A..
What Could a Body Tell a Social Robot that It Does Not Know?.
DOI: 10.5220/0004892503580367
In Proceedings of the International Conference on Physiological Computing Systems (OASIS-2014), pages 358-367
ISBN: 978-989-758-006-2
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

third example is the most challenging. The transcript
does not allow much inference. Jill does not say
anything. This could have many reasons. If we had
access to her expressive behavior, perhaps we could
sense whether Jill is very upset. We assume that she
is upset – even if this was nowhere indicated. Why?
Because as we interact with others, or observe the
interaction between others we engage in something
akin to mind reading (at least this is how some
researchers, e.g., Baron-Cohen et al., 2000 refer to
it). There are multiple ways of drawing inferences
regarding the emotions, beliefs, and intents of
others. In some cases, we use observable behavior
(this would fit with the second example). In other
situations, we simulate in our head how we would
feel if we were in this situation and extrapolate how
someone else might feel, particularly, if there is a
lack of (supposedly) reliable nonverbal signs. There
are many different concepts how we should or could
understand these empathic processes (Batson, 2009),
and it is fair to say that some of these scenarios will
remain a challenge for artificial systems for a long
time to come. It is important to note that many
humans have difficulties with these situations as
well. Children must learn these skills and some
adults have difficulties because they are not good in
any “theory of mind” tasks throughout their life.
It has often been suggested (e.g., Picard, 1999) to
augment human-computer interaction with analyses
of nonverbal behavior, as humans also require this
information in many situations. However,
theoretically it is possible that an artificial system
could overcome some of the challenges in
communication by including information that would
not be available to the human interactant. Imagine in
the third scenario, that an artificial system had
access to changes in Jill’s cardiovascular system.
Perhaps Jill does not say anything, maybe she does
not show anything on her face, but perhaps she is,
metaphorically, boiling inside. An artificial system
might be in an even better position than a human to
conclude that Jill is very much upset – possibly
offended by the statement of John. This is the reason
why the idea of augmenting human computer
interaction, for example in the context of social
robotics, with an analysis of nonverbal behavior and
physiological responses is so intuitively seductive.
Thus, in the last few years, several attempts have
been made to incorporate such information.
It is the goal of this presentation to describe
some of the challenges that an analysis of expression
and psychophysiology entail. Initially, we will
discuss some conceptual challenges, based on the
current state-of-the-art in psychology. This relates
particularly to the question what nonverbal behavior
and changes in psychophysiological activation
mean. Then, we will discuss some technical
challenges, which include issues such as sensor
placements and artifacts with illustrations from our
own laboratory.
2 CONCEPTUAL CHALLENGES
Ideally, psychophysiological and expressive data
would reliably yield unambiguous information about
the emotional state of a subject across a large range
of different situations. However, this is generally not
the case. Even our best measures have been shown
to correlate only moderately with any other indicator
of emotional states (Mauss and Robinson, 2009).
Why? The answer is not confined simply to
technical aspects of our measurement instruments,
but in part relates to more fundamental conceptual
issues. To understand these conceptual challenges,
we should first consider the specificity and
generality of the relationships between any
hypothetical set of measures (Cacioppo et al., 2000).
For example, a blood glucose test at a medical
examination (Cacioppo et al., 2000) will only be
valid as long as certain assumptions about the
context are met. Specifically, the measure of blood
glucose will not be very informative about a medical
condition like diabetes if the patient decided to have
a quick snack just before going to the doctor. At a
more abstract level, the need for constraints to be
met relates to the degree of generality at which a
given measure can be expected to faithfully reflect
the construct that is to be measured. Within
psychophysiology, this has been defined as the level
of generality of psychophysiological relationships
(Cacioppo and Tassinary, 1990; Cacioppo et al.,
2000). For the measurement of emotions in HRI, the
implication is that different individual indicators will
vary in their validity across experimental contexts.
In addition to their degree of generality, or
context-dependency, psychophysiological measures
of emotion can vary in how specifically they are tied
to emotional states, i.e., in how close they come to
having a one-to-one relationship with emotions. This
dimension is important because emotions are
typically not the only drivers of physiological or
expressive behaviors. In other words, there are
typically many reasons why a physiological
parameter might change at any given moment; i.e.,
these are instances of many-to-one relationships
(Cacioppo et al., 2000). Important examples for this
kind of situation are measures of electrodermal
WhatCouldaBodyTellaSocialRobotthatItDoesNotKnow?
359
activity (EDA) and facial electromyography (EMG),
both of which are frequently used indicators of
emotional states. While an emotionally arousing
stimulus is likely to trigger an electrodermal
response, and a pleasant experience will often be
accompanied by a response of facial muscles, other
factors have an impact on either one of these
measures as well. For example, we may smile out of
politeness, or we may show an EDA response due to
an unexpected noise that has nothing to do with our
interaction partner at the time.
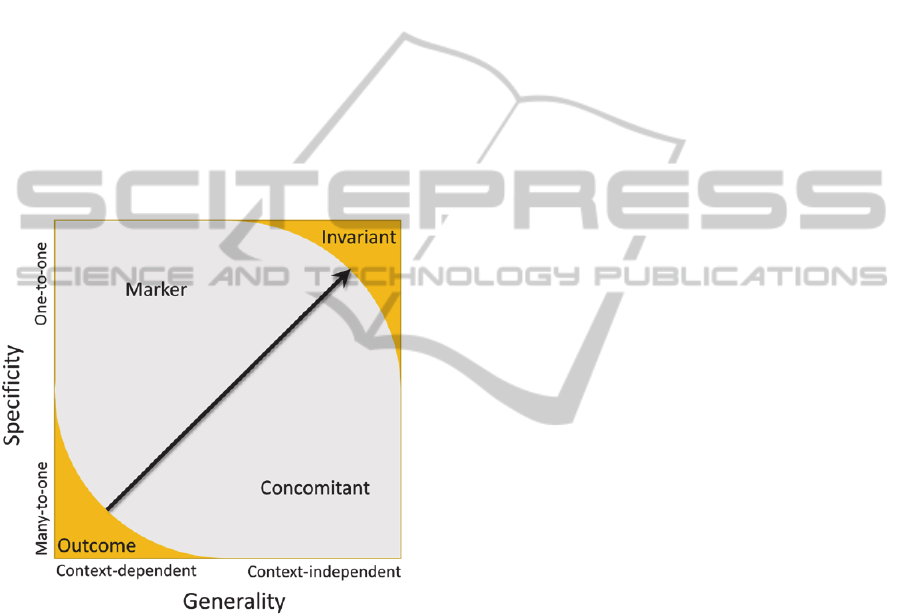
Generality of valid measurement contexts and
specificity of the relationships of emotion measures
can be considered jointly in terms of a 2 by 2
taxonomy. Figure 1 shows the categories of
relationships that can be derived from the taxonomy
elaborated by Cacioppo and colleagues (e.g.,
Cacioppo and Tassinary, 1990; Cacioppo et al.,
2000).
Figure 1: Taxonomy of psychophysiological relationships
(adapted from Cacioppo et al., 2000).
In most cases, our measures of emotion in HRI
should likely be interpreted cautiously as outcomes
that are based on many-to one relationships in a
specific type of context. This does not mean that
they would not allow systematic inferences about
emotions that can be useful for live HRI – but it
important to understand that we are generally not
dealing with specific markers or even context-
independent, invariant, indicators of emotional
states that could provide a readout of the true
emotional state of a human as it evolves in
interaction with a robot. Rather, we need to consider
which measure, or set of measures, will be most
appropriate for a given measurement situation, and
understand which other factors might bias our
indicators in this situation. As we will discuss, this
also implies a need for further testing and validation
of new measures that claim to measure the same
psychological processes as conventional laboratory
measures – but which aim to do so in a different
context.
Given these challenges, what type of inferences
can still be drawn from physiology and expression?
The recording of facial activity may be a good
example here because recent advances in technology
have been paving the way for fully automated face-
based affect detection (Calvo and D’Mello, 2010).
However, as we have argued previously (Kappas,
2010), an overestimation of cohesion between
certain facial actions and emotional states can lead
to wrong conclusions about user states or action
tendencies in real-world applications. In certain
cases, a user might smile because she is happy. At
other times, she might smile to encourage a robotic
system to continue – and at yet other times, she
might smile to cope with an otherwise almost
painful social situation.
The relationship between certain individual
measures of emotional states, e.g., a smile, and
fundamental dimensions of emotions such as
hedonic valence is not necessarily linear (e.g.,
Bradley et al., 2001; Lang et al., 1993; Larsen,
Norris, and Cacioppo, 2003). However, the reasons
why we need to be so cautious about interpreting
individual measures of expression in HRI are
primarily concerned with the social functions of
emotional expressions. Many functions of emotions
are social (Kappas, 2010), and the social audience at
which participants may direct facial expressions
need not even be physically present in an
experimental context (Fridlund, 1991; Hess, Banse,
and Kappas, 1995).
There are of course cases where automatically
recorded data from other facial actions, such as
movements associated with frowning or with disgust
expressions may be able to help disambiguate the
contextualized meaning of a smile – yet even this is
not always sufficient. In the latter case, the context-
specific implications of a particular experimental
situation might be studied in advance with the aid of
human judges. For example, when the intended
application aims at an interaction between students
of a certain age with a particular type of robot in a
teaching context that focuses on a specific body of
content, a common practice is to train the system
with likely types of responses that may occur at
certain critical moments during this interaction.
While such a strategy obviously does not “solve” the
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
360

underlying conceptual challenges relating to the
context-sensitivity of emotional expressions, it helps
the system to learn how to respond more naturally in
a certain set of specific situations. In consequence,
behavioral rules can be formulated that make use of
physiological and expressive indicators without
overestimating their contextual generality.
3 PRACTICAL CHALLENGES
Apart from some of the conceptual challenges, such
as the temptation to overestimate cohesion between
emotional states and their physiological and
expressive indicators across different types of social
contexts, social robotics has to face a number of
more practical challenges. Some of these might be
overcome by further technical development, and
others can be addressed at least partially by strict
adherence to state-of-the-art research standards and
additional basic research and validation studies.
Among the technical challenges that, perhaps
surprisingly, to date still have not been fully
overcome, is the development of a truly
comprehensive and reliable automated system that
can distinguish as many facial Action Units (AUs,
see Ekman and Friesen, 1978) as trained human
coders can (Calvo and D’Mello, 2010; Valstar et al.,
2011). Further, for purposes of improving affect
sensing in social robots, a live integration of coded
AUs into the researchers’ own software architecture
is required, whereas available commercial systems
sometimes only offer this data at a pre-interpreted
aggregate level of basic emotions such as
“happiness” or “sadness”. In other cases, basic
licensing issues deny direct access to the online AU-
prediction generated by commercial affect detection
modules. Either limitation, while seemingly trivial,
presents some very practical challenges to
effectively incorporating facial affect sensing into
interdisciplinary research on emotionally intelligent
HRI. Ideally, all action units would be directly
available to the artificial intelligence controlling the
robot as well as the software architecture that
records all responses made over the course of an
interaction.
We already know from the psychological
literature on how humans perceive emotions that
even subtle differences such as the type, timing, and
onset of a smile can have a significant impact on
how it is perceived (Johnston et al., 2010;
Krumhuber and Kappas, 2005; Krumhuber et al.,
2007; Schmidt et al., 2006). In consequence, even
perfectly accurate information about the presence vs.
absence of an action unit as such may not be
sufficient to eventually approximate a humanlike
level of facial perception capabilities. Clearly,
dynamics and intensities matter. While it remains an
empirical question to what extent more
comprehensive affect recognition systems will be
able to improve the socio-emotional capabilities of a
robot, work on the technological challenge to collect
and process this data has to be accompanied by
further empirical research on facial dynamics on the
level of action units.
The need for further research on facial dynamics
on the level of Action Units relates to a more general
set of challenges that have to do with the transfer of
extant laboratory research to the context of more
applied environments. In the case of facial dynamics
in HRI, the additional issue arises that the system
needs to interpret the evolving context of an ongoing
interaction in real time, and this context will
typically be based on a substantial number of
different sources of information about changing
emotional states. In other words, multiple levels of
information need to be analysed in real time – the
very task that humans appear to perform so
effortlessly in daily life!
In the psychological laboratory, basic research
usually focuses on a small number of factors that are
controlled as strictly as possible to allow inferences
about their relative contributions. We have argued
previously that this type of fine-grained perspective
is crucial for understanding emotional interactions,
for example in computer-mediated communication
(Theunis et al., 2012). However, it is also clear that
social robotics has to find practicable means to
collect, filter, and use whatever emotion-related
information is available and relevant in the applied
context at hand. In HRI, the robot or artificial system
has to be able to act, and interact, immediately on
the basis of the available input. This changes the
focus of important paradigms of laboratory research
on emotions, such as the study of individual
modalities (e.g., Scherer, 2003), or interindividual
differences (e.g., Prkachine et al., 2009), toward a
focus on parameters that may be able to help the
system to make more sensible decisions about how
to respond at different moments of the interaction. In
many ways, this challenge to find parameters that
are most useful in a number of applied situations is
potentially a very fruitful approach, also for the
psychological study of emotions. At the same time,
however, we have to be aware that factors other than
those related to affect-detection per se may turn out
to have an even greater impact on the success of a
social robot in an interaction. Here, practical
WhatCouldaBodyTellaSocialRobotthatItDoesNotKnow?
361

considerations are often closely linked to conceptual
issues, such as the importance of helping the robot
understand the context of emotional expressions
rather than affect detection per se (see Kappas,
2010).
Apart from the concrete example of automatic
affect detection from facial actions, the use of
physiological measures of any kind faces a number
of rather basic challenges related to the physical
environment of the recording situation. Certain
measures, e.g., electrodermal activity (EDA), are
known to be influenced by environmental factors
such as ambient temperature or noise (Boucsein,
2012; Dawson et al., 2000). This means that sudden
noises generated by an experimental task, ringing
cell phones, other people in the room, or even loud
movements of a social robot’s motors above a
certain threshold, could elicit electrodermal
responses that have nothing to do with the intended
behaviour of the robot. Further relevant factors
include speech, irregular breathing, and gross body
movements (Boucsein et al., 2012).
While most of the typical environmental
confounding factors can generally be well controlled
across experimental conditions in laboratory
research, ambulatory recording is challenged by
significantly more uncertainty regarding the source
of variations in EDA (Boucsein et al., 2012). As
Boucsein and colleagues (Boucsein et al., 2012)
further point out, a socially engaging situation, or
even a novel environment may cause a similar
magnitude fluctuations in electrodermal activity as
stress or fear. For example, the first interaction with
a new type of robot will most probably qualify as a
new and socially engaging situation for naïve
participants. Therefore, ambulatory experiments
involving measurement of electrodermal activity in
social robotics should include additional time for
familiarization of subjects with the experimental
environment, the recording procedures, and the
robot itself. This is particularly the case for
ambulatory recording devices like Affectiva’s Q-
Sensor (http://www.affectiva.com/q-sensor/) that
require a "warmup" period for optimal recording.
Due to practical considerations, researchers are often
understandably hesitant to devote several minutes of
valuable experiment time to seemingly unnecessary
familiarization periods and resting baselines.
However, in particular when psychophysiological
measures are involved, this time of getting to know
the experimental context can help eliminate
unwanted error variance in how users initially
respond to an unknown recording situation. One
concrete example where this was successfully
applied can be found in a recent study involving the
measurement of electrodermal activity of children
interacting with an iCAT (Leite et al., 2013). Here,
the sensors were attached 15 minutes prior to the
actual experiments, and the experimenter guided
participants to the location of the interaction with the
robot.
In some cases, relevant environmental factors are
relatively method specific, and some of these may
already be well known to computer scientists. E.g.,
the quality and type of lighting can have substantial
impact on most facial affect recognition systems.
Likewise, tracking of more than one human user at a
time can pose a considerable technical challenge for
the reliable recording of facial action units. For other
measures, such as the recording of
electrocardiographic (ECG) data, or facial
electromyography (EMG), impedances between the
skin of the subjects and the recording electrodes can
play an important role, and that even in cases where
traditional wired sensors are used (cf., Fridlund and
Cacioppo, 1986; Cacioppo et al., 2007).
For this reason, the best choice of recording
instruments depends not only on the type of research
questions asked, but also on the physical constraints
of the recording situation, as well as ongoing
developments for both sensors and software. For
example, currently available sensors for the
recording of electrodermal activity, like the
aforementioned Affectiva Q-Sensor, have been
focusing on the advantages of a convenient
placement near the wrist of participants. However,
this placement may not be an optimal measurement
location for the assessment of emotional sweating
(van Dooren et al., 2012; see also Payne et al.,
2013), nor is it recommended by the current official
guidelines because this site may reflect more
thermoregulatory rather than emotionally relevant
electrodermal phenomena (Boucsein et al., 2012).
However, either further empirical research might
establish that this recording site can nevertheless
generate enough emotionally significant data despite
being not optimal (Kappas et al., 2013), or additional
technical developments might make it possible to
perform reliable wireless recordings from a different
site.
A final, but important, set of practical challenges
relates to the impact of the psychological rather than
physical recording environment. From a social
psychological perspective, the presence vs. absence
of a human experimenter in the context of an
ongoing social interaction between a human
participant and a robotic partner is a potentially very
interesting variable. In HRI, there are often practical
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
362

reasons why researchers may decide to keep an
experimenter nearby, e.g., in studies with younger
children involving potentially very expensive or
technically challenging systems. However, the
physical presence or absence of an experimenter
may be sufficient to fundamentally change the social
context of an experiment, in particular in those cases
where having an experimenter present might appear
to be a practical requirement. In fact, social
psychological research of the last decades has
repeatedly demonstrated that even a merely implicit
presence of other people can have on key emotional
behaviors such as smiling (Fridlund, 1991; Hess et
al., 1995; Manstead et al., 1999; Küster, 2008). For
example, Fridlund (1991) measured facial responses
to funny videos and found that even to believe that a
friend was watching the same videos elsewhere was
already sufficient to increase smiling in comparison
to a truly solitary viewing condition. In comparison
to such subtle effects, the actual physical presence of
another person can hardly be expected to fail to have
a significant effect on the psychological recording
situation, no matter how justifiable the physical
presence of a “silent experimenter” may appear to
be.
A particularly relevant and widely used
experimental technique in the study of HRI is based
upon the use of a Wizard of Oz (WoZ; e.g.,
Dautenhahn, 2007; Riek, 2012) paradigm, i.e., a
human puppeteer who controls some or all of the
behavioural responses of the robot. This is a socially
complex situation because the participant is
interacting with a “robot” that is at least partially
controlled by another human who is usually seated
outside of direct view, or in a separate room. The
puppeteer remains anonymous and as such invisible
to the human subject, and this presents a certain
safeguard against sociality effects that are tied to the
immediate physical presence of an experimenter.
However, the WoZ paradigm can nevertheless vary
in the level at which the wizard is implicitly present
in the situation, and there are potentially numerous
ways in which a confederate, i.e., the wizard, may
influence or “prime” responses of the participant in
rather automatic ways with little or no conscious
awareness (see Bargh et al., 1996; Kuhlen and
Brennan, 2013). For this reason, it is important to
control the psychological recording environment as
well as possible across all participants taking part in
an experiment. In particular, the wizard(s) should
receive systematic training to standardize responses
as well as minimize learning effects and fatigue
which may otherwise create undesirable systematic
variance in how the social context of the
experiments is perceived by the very first vs. later
participants. This may of course be less of an issue
in WoZ studies that focus on rapid prototyping (see,
e.g., Dautenhahn, 2007) yet it becomes more critical
as soon as differences in user evaluations are to be
tested systematically, or when physiological or
expressive measures are to be tested and trained to
be used as parameters. As Fridlund (1991, 1994) and
others have shown, socially relevant expressions
appear to be surprisingly vulnerable to even very
subtle variations of the social environment.
However, in a recent review on Wizard of Oz
studies in HRI (Riek, 2012), only a small minority of
5.4% of studies reported any pre-experimental
training of wizards, and only 24.1% reported an
iterative use of WoZ. This suggests that in particular
the control of seemingly minor social factors may
require more systematic attention.
Further challenges related to the psychological
context of an experiment with physiological
measures relate to the subject’s awareness of being
measured, and the impact of preceding tasks. First, it
is of course not surprising that a feeling of being
observed is likely to bias results, for example when
effects of social desirability are considered (Paulhus,
1991; 2002). However, this is also an example of the
context-dependency of psychophysiological
relationships that we discussed in the section on
conceptual challenges above. Thus, children, for
example, can be expected to respond differently to
observation than adults, and adult students will
likely respond differently from other specific groups
such as teachers, or elderly people. Importantly,
from the perspective of physiological measures, we
can further not assume that, e.g., differences
observed between age groups on the level of self-
reported emotions will translate one-to-one into the
same type of differences in the physiological
domain. For example, if we were to ask a few
children and a few adult students about their
emotional experience in a pre-test, we might find
that the children perceive certain aspects of the
robot’s emotional capabilities more positively than
our adult sample. However, it might be that the
psychological context of the experiment as such,
rather than the robot with its limited response
repertoire, would have been much more exciting for
the children than for the adults. This generally
elevated level of excitement, or arousal, may show
up in physiological or expressive measures – but it
can depend on the specific measure in question to
what extent this is the case. However, while
simplified pretests of experiments can be very
useful, e.g., for the training of a confederate or WoZ,
WhatCouldaBodyTellaSocialRobotthatItDoesNotKnow?
363

we have to be cautious about predictions derived on
the basis of a different type of sample than the one
that is finally used. Thus, not only may people of
different age groups respond differently to the social
environment of an experiment – but they might also
express themselves in different ways. Physiological
and expressive measures may be of particular use in
explaining some of these potential differences.
However, they themselves require careful testing in
an experimental environment that should, physically
as well as psychologically, be matched as closely as
possible to the final experimental design.
4 SOLUTIONS
AND NEW CHALLENGES
Until recently, our discussion of practical challenges
for the use of psychophysiological measures in HRI
research would have had to begin with a discussion
of the very basic problems associated with moving
amplifiers and cables out of the laboratory into
locations that allow a certain degree of freedom of
movement to participants without loss of signal
quality. With the advent of a number of wireless
lightweight recording systems for both expressive as
well as bodily signals, many of these issues appear
to have been reduced or eliminated. Or have they?
As might be expected, the answer depends on the
specific measure and measurement context in
question. If, for example, the participant can be
expected to remain seated, and only smiling activity
needs to be recorded for the purposes of an
experiment, a number of inexpensive or freely
available facial affect detection systems can be
expected to provide this data reliably. As discussed
above, the detection of a larger range of AUs,
however, is still far from solved (Valstar et al., 2012;
Chu, De la Torre, and Cohn, 2013). Further,
automated facial affect detection is still challenged
by individual differences in facial morphology that
can dramatically influence the performance of
classifiers for previously unseen individuals (Chu et
al., 2013). Such differences include, for example the
shape and type of eyebrows and deep wrinkles (Chu
et al., 2013).
Other techniques, such as facial
electromyography (EMG) use electrodes attached to
the face, and can be more robust in this respect
because trained human experimenters affix the
electrodes at the precise recording site appropriate
for an individual subject. Further strengths of Facial
EMG are a high temporal resolution and sensitivity
to even very subtle intensity changes of activation
(van Boxtel, 2010). Due to the technical and
practical limitations involved, however, facial EMG
has been a strictly laboratory based measure until
just a few years ago. Yet facial EMG is an example
where ongoing technical developments are
beginning to look rather promising. Thus,
meanwhile, wireless off-the-shelf solutions have
been produced for the recording of facial EMG (e.g.,
BioNomadix, www.biopac.com). Further, at a
prototype level, head-mounted measurement devices
no longer require a physical attachment of electrodes
to the face. In an initial validation study, strong
correlations were observed between such a device
and traditional measurement at typical recording
sites (Rantanen et al., 2013). This might address a
number of disadvantages of the use of facial EMG,
such as its relative intrusiveness compared to a video
recording, including the pre-treatment of the skin
before electrodes can be attached. However, further
empirical validation of contact-free EMG recording
is still required, as well as a reduction in weight and
general usability before such devices may be ready
for a larger-scale use in applied contexts.
For other physiological signals, such as EDA,
particularly lightweight and convenient portable
sensors have already been developed. As for facial
EMG, such sensors may help to overcome some of
the typical practical challenges associated with using
physiological recording devices “in the wild”.
Sensors that can be worn just as easily as a wrist-
watch, for example, are likely to cause much less
interference with an ongoing study. In consequence,
it can be hypothesized that they will have a
substantially smaller impact on levels of self-
awareness of participants, and the general extent to
which subjects feel observed. Likewise, as
physiological recording systems are becoming more
useable and less obtrusive, the range of possible
applications broadens, and this may allow entirely
new avenues for research. However, new sensors in
this domain often still lack systematic empirical
validation studies. This concerns not only the
reliability of the measurements taken by these
devices but also the validity of the psychological
constructs being measured. In particular where new
and innovative recording sites are used, the
empirical question arises if the convenient new
measurement location still reflects the same kind of
psychological mechanisms. If it does not, then the
inclusion of such data risks contributing little to the
effective affect-sensing capabilities of a robot – and,
in the worst case, it might even be counter-
productive.
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
364

5 OUTLOOK
We have described some of the most important
conceptual and practical challenges that have to be
overcome to incorporate expressive and
psychophysiological data in field research on HRI.
On the conceptual level, we have emphasized some
of the fundamental limits of generality and
specificity in the relationships between bodily
measures of emotion and the underlying
psychological constructs. On a more practical level,
we have discussed many of the most commmen
problems faced by researchers who want to employ
psychophysiolgical measures outside the laboratory.
We have emphasized how both the physical and the
psychological environment of an experiment need to
be carefully considered when designing experiments
such as WoZ studies. This is particularly the case
when meaningful effects are to be compared
between experimental conditions, and when
inferences are to be drawn about the associated
psychological processes involved. We now conclude
our contribution by the attempt of a brief look into
the future.
While the significant challenges to the use of
bodily signals highlighted in this paper should not be
underestimated, there are likely a substantial number
of situations where a robot, for all practical
purposes, need not be perfect in order to be
perceived as attentive, empathic, or emotional. Thus,
to improve perceived realism of robotic behaviour, it
may not always be necessary to understand precisely
the emotional state of participants throughout the
entirety of the experiment. While this would, of
course, be advantageous, even humans are not
necessarily the gold standard of affect detection that
we might think intuitively take them for (Kappas,
2010). Rather, humans have been shown to be
heavily influenced by contextual factors (Russell et
al., 2003), to perform surprisingly poorly at
emotional lie-detection tasks (Ekman and
O’Sullivan, 1991), and to tend to fail at tasks
involving interoception, such as tracking one’s own
heart-beats (Katkin et al., 1982).
What are the implications if social robots after all
do not have to be perfect at distinguishing, e.g.,
polite social smiles from genuine smiles? It is
possible that robots may not even have to excel at
general inferences about ongoing changes in action
tendencies (see Frijda et al., 1989) or predict
perfectly the likely future actions of a human partner
from physiology alone across a broad range of
contexts. While improved measurement devices are
undoubtedly an important piece of the puzzle, we
argue that an actual understanding of the situation
may turn out to be equally important. At present,
more work appears to be needed on the design of
critical experimental situations where the pattern of
all available information allows clear predictions on
the appropriateness of a set of different behavioural
response options for the robot. For example, an
increase in physiological arousal coupled with the
participant’s eye-gaze and a smile directed at the
robot could be a fairly clear indicator that the
interaction is going well, and that the robot might
continue further along the current path. At other
times, physiological data, including information
about head orientation or gaze synchronicity, might
be used successfully to adjust the precise timing of
certain pre-arranged sets of statements. Finally, yet
other data might be used in concert with
physiological and expressive data, e.g., response
latencies or button presses recorded from an ongoing
task (e.g., Leite et al., 2013). If we can use
physiology to improve social robots at certain key
moments of an interaction, we may already be on a
good way to improve our understanding of context-
sensitive emotional responding in HRI at a more
general level.
Through careful experimental design, the
context-dependency of emotions in HRI may, at
least in part, be transformed from a challenge into a
characteristic that can be systematically employed to
improve realism and fluency of social robotics.
However, for this to occur, substantial additional
basic research is still needed concerning the role of
social context in physiological and expressive
measures of emotion in HRI.
REFERENCES
Baron-Cohen, S., Tager-Flusberg, H., Cohen, D. J., 2000.
Understanding other minds: Perspectives from
developmental cognitive neuroscience, Oxford
University Press. Oxford, UK.
Bargh, J. A., Chen, M., Burrows, L., 1996. Automaticity
and social behavior: Direct effects of trait construct
and stereotype activation on action. Journal of
Personality and Social Psychology, 71, 230-244.
Batson, C. D., 2009. These things called empathy: Eight
related but distinct phenomena. In: J. Decety & W.
Ickes (Eds.), The Social Neuroscience of Empathy (pp.
3–15), MIT Press. Cambridge, UK.
Boucsein, W., 2012. Electrodermal activity, Springer.
New York.
Boucsein, W., Fowles, D. C., Grimnes, S., Ben-Shakhar,
G., Roth, W. T., Dawson, M. E., Filion, D. L., 2012.
Publication recommendations for electrodermal
measurements. Psychophysiology, 49, 1017-1034.
WhatCouldaBodyTellaSocialRobotthatItDoesNotKnow?
365

Bradley, M. M., Codispoti, M., Cuthbert, B. N., Lang, P.
J., 2001. Emotion and motivation I: Defensive and
appetitive reactions in picture processing. Emotion, 1,
276-298.
Calvo, R. A., D’Mello, S., 2010. Affect detection: An
interdisciplinary review of models, methods, and their
applications. IEEE Transactions on Affective
Computing, 1, 18-37.
Cacioppo, J. T., Tassinary, L. G., 1990. Principles of
psychophysiology: Physical, social, and inferential
elements. New York: Cambridge University Press.
Cacioppo, J. T., Tassinary, L. G., Berntson, G. G., 2000.
Psychophysiological science. In: J.T. Cacioppo, L.G.
Tassinary, G.G. Berntson (Eds.), Handbook of
Psychophysiology (3-23), Cambridge University
Press. Cambridge, UK, 2
nd
edition.
Cacioppo, J. T., Tassinary, L. G., Berntson, G. G., 2007.
Handbook of Psychophysiology, Cambridge
University Press. UK, 3
rd
edition.
Chu, W.-S., de la Torre, F., Cohn, J. F., 2013. Selective
transfer machine for facial action unit detection. IEEE
International conference on Computer Vision and
Pattern recognition. Portland, OR.
Dautenhahn, K., 2007. Methodology & themes of human-
robot interaction: A growing research field.
International Journal of Advanced Robotic Systems, 4,
103-108.
Dawson, M. E., Schell, A. M., Filion, D. L., 2000. The
electrodermal system. In: J. T. Cacioppo, L. G.
Tassinary, G. G. Berntson (Eds.), Handbook of
Psychophysiology (200-223), Cambridge University
Press. Cambridge, UK.
Ekman, P., Friesen, W. V., 1978. The Facial Action
Coding System, Consulting Psychologists Press. Paolo
Alto, CA., 2
nd
edition.
Ekman, P., O’Sullivan, 1991. “Who can catch a liar?”
American Psychologist, 46, 913-920.
Fridlund, A. J., 1991. Sociality of solitary smiling:
Potentiation by an implicit audience. Journal of
Personality and Social Psychology, 60, 229-240.
Fridlund, A. J., 1994. Human facial expression: An
evolutionary view. Academic Press. San Diego, CA.
Fridlund, A. J., Cacioppo, J. T. 1986. Guidelines for
human electromyographic research. Psychophysiology,
23, 567-588.
Frijda, N. H., Kuipers, P., ter Schure, E., 1989. Relations
among emotion, appraisal, and emotional action
readiness. Journal of Personality and Social
Psychology, 57, 212-228.
Hess, U., Banse, R., Kappas, A., 1995. The intensity of
facial expression is determined by underlying affective
state and social situation. Journal of Personality and
Social Psychology, 69, 280-288.
Jonhston, L., Miles, L., Macrae, C. N., 2010. Why are you
smiling at me? Social functions of enjoyment of non-
enjoyment smiles. British Journal of Social
Psychology, 49, 107-127.
Kappas, A., 2010. Smile when you read this, whether you
like it or not: Conceptual challenges to affect
detection. IEEE Transactions on Affective Computing,
1, 38-41.
Kappas, A., Küster, B., Basedow, C., Dente, P., 2013. A
validation study of the Affectiva Q-Sensor in different
social laboratory situations. Poster presented at the
53rd Annual Meeting of the Society for
Psychophysiological Research. Florence, Italy.
Katkin, E. S., Morell, M. A., Goldband, S., Bernstein, G.
L., Wise, J. A., 1982. Individual differences in
heartbeat discrimination. Psychophysiology, 19, 160-
166.
Kuhlen, A. K., Brennan, S. E., 2013. Language in
dialogue: When confederates might be hazardous to
your data. Psychonomic Bulletin & Review, 20, 54-72.
Küster, D., 2008. The relationship between emotional
experience, social context, and the face: An
investigation of processes underlying facial activity
(Doctoral dissertation). Retrieved from
http://www.jacobs-university.de/phd/files/1199465732
.pdf.
Leite, I., Henriques, R., Martinho, C., Paiva, A., 2013.
Sensors in the wild: Exploring electrodermal activity
in child-robot interaction. Proceedings of the 8th
ACM/IEEE international conference on Human-robot
interaction. ACM/IEEE Press.
Krumhuber, E., Kappas, A., 2005. Moving smiles: The
role of dynamic components for the perception of the
genuineness of smiles. Journal of Nonverbal
Behavior, 29, 3-24.
Krumhuber, E., Manstead, A.S.R., Kappas, A., 2007.
Temporal aspects of facial displays in person and
expression perception: The effects of smile dynamics,
head-tilt, and gender. Journal of Nonverbal Behavior,
31, 39-56.
Lang, P. J., Greenwald, M. K., Bradley, M. M., Hamm, A.
O., 1993. Looking at pictures: Affective, facial,
visceral, and behavioral reactions. Psychophysiology,
30, 261-273.
Larsen, J. T., Norris, C. J., Cacioppo, J. T., 2003. Effects
of positive and negative affect on electromyographic
activity over zygomaticus major and corrugator
supercilii. Psychophysiology, 40, 776-785.
Manstead, A. S. R., Fischer, A. H., Jakobs, E., 1999. The
social and emotional functions of facial displays. In P.
Philippot, R.S. Feldman, E.J. Coats (Eds.), The social
context of nonverbal behavior (pp. 287-313),
Cambridge University Press. Cambridge, UK.
Mauss, I. B., Robinson, M. D., 2009. Measures of
emotion: A review. Cognition & Emotion, 23, 209-
237.
Paulhus, D. L., 1991. Measurement and control of
response bias. In J. P. Robinson, P. R. Shaver, &
Wrightsman Eds., Measures of personality and social
psychological attitudes (pp. 17-59), Academic Press,
Inc. San Diego, CA.
Paulhus, D. L., 2002. Socially desirable responding: The
evolution of a construct. In H.I. Braun, D. N. Jackson,
& D. E. Wiley (Eds.), The role of constructs in
psychological and educational measurement (pp. 49-
46), Erlbaum. Mahwah, N.J.
Payne, F. H., Dawson, M. E., Schell, A. M., Kulwinder,
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
366

S., Courtney, C. G., 2013. Con you give me a hand? A
comparison of hands and feet as optimal anatomical
sites for skin conductance recording.
Psychophysiology, 50, 1065-1069.
Picard, R. W., 1999, Affective Computing for HCI.
Proceedings HCI, 1999. Munich, Germany.
Prkachin, G. C., Casey, C., Prkachin, K. M., 2009.
Alexithymia and perception of facial expressions of
emotion. Personality and Individual Differences, 46,
412-417.
Rantanen, V., Venesvirta, H., Spakov, O., Verho, J.,
Vetek, A., Surakka, V., Lekkala, J., 2013. Capacitive
measurement of facial activity intensity. IEEE Sensors
Journal, 13, 4329-4338.
Riek, L. D., 2012. Wizard of Oz studies in HRI: A
systematic review and new reporting guidelines.
Journal of Human-Robot Interaction, 1, 119-136.
Rosengren, K. E., 2000. Communication: An introduction,
Sage. London.
Russell, J. A., Bachorowski, J.-A., Fernández-Dols, J.-M.,
2003. Facial and vocal expressions of emotion. Annual
Review of Psychology, 54, 329-349.
Scherer, K. R., 2003. Vocal communication of emotion: A
review of research paradigms. Speech Communication,
40, 227-256.
Schmidt, K. L., Ambadar, Z., Cohn, J. F., Reed, L. I.,
2006. Movement differences between deliberate and
spontaneous facial expressions: Zygomaticus major
action in smiling. Journal of Nonverbal Behavior, 30,
37-52.
Searle, J. T., 1976. A classification of illocutionary acts.
Language in Society, 5, 1-23.
Theunis, M., Tsankova, E., Küster, D., Kappas, A., 2012.
Emotion in computer-mediated-communication: A
fine-grained perspective. Poster presented at the 7th
Emotion Pre-Conference to the Annual Meeting of the
Society for Personality and Social Psychology. San
Diego, California.
Valstar, M. F., Mehu, M., Jiang, B., Pantic, M., Scherer,
K., 2012. Meta-analysis of the first facial expression
recognition challenge. IEEE Transactions on Systems,
Man, and Cybernetics – Part B: Cybernetics, 42, 966-
979.
va Boxtel, A., 2010. Facial EMG as a tool for inferring
affective states. In A. J. Spink, F. Grieco, O. E. Krips,
L. W. W. Loijens, L. P. J. J. Noldus, & P. H.
Zimmerman (Eds.), Proceedings of Measuring
Behavior 2010 (pp. 104-108). Eindhoven, The
Netherlands.
van Dooren, M., de Vries, J. J. G., Janssen, J. H., 2012.
Emotional sweating across the body: Comparing 16
different skin conductance measurement locations.
Physiology & Behavior, 106, 298-304.
WhatCouldaBodyTellaSocialRobotthatItDoesNotKnow?
367
