
A Problem-solving Agent to Test Rational Agents
A Case Study with Reactive Agents
Francisca Raquel de V. Silveira, Gustavo Augusto L. de Campos and Mariela I. Cortés
State University of Ceará (UECE), Fortaleza, Brazil
Keywords: Test Agents, Selection of Test Cases, Rational Agents.
Abstract: Software agents are a promising technology for the development of complex systems, although few testing
techniques have been proposed to validate these systems. In this paper, we propose an agent-based approach
to select test cases and test the performance of rational agent. Interactions between agent and environment
are realized in order to evaluate the agent performance for each test case. As a result, we obtain a set of test
cases where the agent has not been well evaluated. Based on this result, the approach identifies the goals
that are not met by the agent and reported to the designer.
1 INTRODUCTION
Agent is an entity capable of perceiving their
environment by means of sensors and act in this
environment through actuators. The concept of
rational agents refers to those agents, which act to
achieve the best expected result, namely the best
measure of performance (Russell and Norvig, 2004).
Since agent-based systems are increasingly
taking over the operations and controls in the
organization management, vehicles and automated
financial systems, guarantees that these complex
systems work properly are required. In this sense, a
research about software engineering methods,
including requirements engineering, architecture and
testing techniques in order to provide appropriate
mechanisms for software development and support
tools it is desirable (Nguyen et al., 2011).
In particular, due to the peculiar properties of
rational agents (reactive properties, learning, goal
and utility orientation), the application of standard
testing techniques is difficult and do not guarantee
the reliability of these systems (Nguyen et al., 2009).
The testing of conventional software with
predictable inputs and outputs is a non-trivial
activity. Testing autonomous agents is a challenge,
since the execution of actions is based on their own
decisions of own agents, which may be different
from the user's perspective, since the same test input
may result in different executions (Nguyen et al.
2009), (Silveira et al., 2013).
Although there are some efforts to support the
development of agent-based systems, little has been
done toward proposing methods and techniques to
test the performance of these systems (Nguyen et al.
2009). The testing of rational agents involves the
adaptation and combination of already existing
techniques for software testing in order to detect
different faults, and to make the software agents
more reliable (Houhamdi, 2011).
In this paper we present an approach to testing
rational agents programs, leading to the designer the
relevant information about the performance of the
agent program, useful to improve its design and
efficiency.
2 BACKGROUND
2.1 Rational Agents
A software agent is a program able to perceive its
environment by means of sensors and acting in this
environment by means of actuators (Russell and
Norvig, 2004). Depending on the context in which
the task can be completed, the agent is able to select
the most suitable way (Poutakidis, 2009).
From the point of view of the agent designer, an
agent is rational if, based on perception, the agent is
able to make correct decisions in order to reach the
goals established by the designer. When the agent is
not able to accomplish all the goals, decisions in
505
de V. Silveira F., Augusto L. de Campos G. and I. Cortés M..
A Problem-solving Agent to Test Rational Agents - A Case Study with Reactive Agents.
DOI: 10.5220/0004899105050513
In Proceedings of the 16th International Conference on Enterprise Information Systems (ICEIS-2014), pages 505-513
ISBN: 978-989-758-027-7
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

order to achieve a greatest degree of satisfaction
defined according to some criterion, are expected.
This criterion is known as measuring problem-
solving performance (Russell and Norvig, 2004).
Based on these principles, four types of rational
agent programs are defined (Russell and Norvig
2004): (i) Simple Reflex agents, where condition-
action rules are used to select the actions to be
executed based on the current perception, (ii)
Model-based Reflex agents, where the agent is able
to store its current state in an internal model, (iii)
Goal-based agents, where agents are model based
agents that set a specific goal and select the actions
that lead to that goal. This allows the agent to choose
a goal state among multiple possibilities; (iv) Utility-
based Agents, where considering the existence of
multiple goal states, it is possible to define a
measure of how desirable a particular state is.
2.2 Agents Testing
Software testing is an activity that aims to evaluate
and improve the product quality by identifying
defects and problems. A test consists in checking the
dynamic behavior of a program along a set of test
cases properly selected (Poutakidis, 2009).
At agent level, the tests are directly related to the
test cases created to evaluate the agent's goals
(Houhamdi, 2011). The agent can have its own
internal goals and knowledge, which can be changed
at runtime, and these can affect the result returned, if
any. The autonomous agent testing to require more
than a single test on the component requires that the
same test be applied in different contexts. Ensure the
variety of contexts tested to declare that the agent
behaves correctly is a difficult but important
(Nguyen et al., 2009).
Testing agents involves the testing of the agent
goals. The agent should be able to achieve their
goals and to act correctly in cases where its
expected goal cannot be achieved. This requirement
may or may not be sufficient to cover the agent
components, planes, beliefs etc. If the adequacy
criterion is not reached, more test cases should be
defined to complete the test agent (Houhamdi 2011).
3 RELATED WORKS
In agent-oriented software engineering several
approaches to testing agent have been proposed. Is a
challenging activity and a process for structured
agent testing is still expected (Houhamdi 2011).
In this section we consider the following criteria
in order to evaluate the attendance of the existing
approaches to testing agent programs: (i) the notion
of rational agents, (ii) utilization of test cases
generated according to the agent goals, (iii) adoption
of a measure to evaluate the agent performance, (iv)
evaluation of the plans used by the agent to reach the
goals, and (v) monitoring the performance measure
of the agent been tested.
A goal-oriented approach for the testing of
agents is presented in (Houhamdi, 2011) that
complements the Tropos methodology (Castro and
Mylopoulos, 2000) and reinforces the mutual
relationship between the analysis and testing
objectives. It also defines a structured process for the
generation of tests for agents by providing a method
to derive test cases from the agent goals. This
strategy does not present: (i) the notion of rational
agents, (ii) a measure to performance evaluation of
the agent and (iii) any simulation to support the
monitoring of the agent behavior.
Nguyen (2008) proposes a systematic and
comprehensive method of goal-oriented testing for
agents, which encompasses the development process
of the agent according to the methodology Tropos
(Castro and Mylopoulos 2000). This work presents a
methodology for the production of test artifacts from
the specifications and design of agents, which are
used to detect problems. The test cases are
automatically generated and evolve guided by
mutation and quality function.
An evolutionary approach to testing autonomous
agents is adopted by (Nguyen et al., 2009). It is
proposed to apply a recruitment of the best test cases
for evolving agents. For each agent is given a trial
period in which the number of tests with different
difficulty levels are executed.
Both approaches (Nguyen, 2008) and (Nguyen et
al., 2009) are focused in the BDI architecture. Thus,
considering the evaluation criteria is not treated: (i)
the notion of rational agents and (ii) a simulation to
monitoring the agent behavior.
4 PROPOSED APPROACH
This section presents the proposed approach and the
aspects involved in the testing of the rational agents.
The approach is centered in a problem-solving agent
for test cases selection, Thestes.
4.1 Selection Test Case of Rational
Agents
In the context of rational agents, the testing consists
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
506
in identify situations where the agent was not well
valued considering an evaluation measure informed
by the designer according environment aspects.
Table 1 specifies a measure of performance
evaluation to the cleaner agent (a version adapted
from Russell and Novirg (2004)) that should clean
up the environment and maximize cleaning and
energy. The first and second columns describe part
of the agent perception and the possible actions
related to each perception. The third and the fourth
columns are associated to the cleaning and energy
goals, respectively, and involve two scalar functions
(av
E
and av
C
) to measure the agent performance.
Table 1: Measure of performance evaluation.
Ep
k
= (P
k
, Action
k
) av
E
(Ep
k
) av
C
(Ep
k
)
..., Clean, ... Aspire -1.0 0.0
..., Clean, ... Righ, Left,
Above, Below
-2.0 1.0
..., Clean, ... No operate 0.0 0.0
..., Dirty, ... Aspire -1.0 2.0
..., Dirty, ... Righ, Left,
Above, Below
-2.0 -1.0
..., Dirty, ... No operate 0.0 -1.0
The achievement of goals which are implicit in the
performance measure established by the designer is
a hint of the rationality of the agent program.
However, it will depend of the adequacy of the
internal environment properties, and the mechanism
used in implementation and execution of the agent
program (architecture), to the external environment
properties, where the task will be performed. Thus,
the test process of those systems should evaluate the
program performance in its task environment,
identifying the goals that are not met (desired states)
in the external environment and the components of
the program internal environment that are restricting
the satisfaction of the goals.
In this context, the efficacy of the test process
depends of the test cases selected. Not always the
best cases are available initially and, depending of
agent task environment, there may be a lot of cases
to be observed. Thus, the selection of a set of test
cases is a search problem in a space of status
composed by a big family of sets of possible cases.
An optimal test case is one that the agent obtains the
minimum performance value as possible. Be:
Agent: the rational agent program to be tested;
Env: the environment program able to interact
with Agent;
InteractionProtocol: a description of the
interaction protocol between Agent and Env;
Ω: a set of feasible environments to instantiate Env
and to test Agent;
P(Ω): subsets of possible environments to be
described in Ω;
TestCASE P(Ω): a subset of test cases in the set
P(Ω), where:
Case
i
TestCASE: a specific environment
description in TestCASE;
H(TestCASE) P((PxA)
NInt
): set of histories of
length N
int
of Agent in Env, considering
InteractionProtocol and all cases in TestCASE
such that i ϵ {1,...,NCases}, t ϵ {1,...,NInt}:
h(Case
i
) (PxA)
NInt
: history of length N
Int
of
Agent in Env correspondent the Case
i
TesteCASE;
Ep
k
(h(Case
i
)) PxA: episode in interaction k,
k N
Int
, of the history of Agent in Env
correspondent the case Case
i
TesteCASE;
fad(H(TestCASE)) = (f
1
(H(TesteCASE)), ...,
f
m
(H(TesteCASE))) Rm: an array of m
objective functions (implicit) in the measure of
performance evaluation made by the designer (m ≥
1), which measures the adequacy of Agent in Env
considering a set of histories H(TestCASE), where,
m ϵ {1, ..., m}:
f
HTestCASE
1
NCases
E
v
h
Case
(1)
that measures the adequacy of Agent in Env, as the
achievement of the goal m in the evaluation
measure, considering the histories in H(TestCASE)
and i ϵ {1, ..., NCases}:
E
v
hCase
e
v
Ep
hCase
(2)
where ev
m
(Ep
k
(h(Case
i
))) is the value of reward /
penalization in goal m assigned by the evaluation of
the episode k of the history associated to the Case
i
TesteCASE;
finad(H(TestCASE)) = ( f
1
(H(TestCASE)), ...,
f
m
(H(TestCASE))) Rm: an array of m
objectives associated the array fad(H(TestCASE),
measures the inadequacy of Agent in Env
considering the histories in H(TestCASE).
Problem:
‘maxime’ finad(H(TestCASE))
subject to: TestCASE ϵ P(Ω) and
H(TestCASE) ϵ P((PxA)N
Int
)
The formulation to the test case selection
problem considers that, if the agent program is
AProblem-solvingAgenttoTestRationalAgents-ACaseStudywithReactiveAgents
507
inadequate, the objective functions of inadequacy,
i.e., the objective functions in the evaluation
measure modified by minus signs (-), will be
maximized. Depending on the objectives, there may
not be an optimal set. In this case, the task is to find
a satisfactory set of cases, i.e., when the
performance of the agent program in the
environment is unsatisfactory and, consequently,
allowing to detect their limited properties.
4.2 Agent of Problem Solving of Test
Case Selection
This section outlines an agent of problem solving of
test cases selection for rational agents programs
(Thestes). The program uses a local search strategy,
based on population and oriented by an utility
function, for finding sets of satisfactory test cases,
i.e., specific environments where the histories
associated to Agent in Env have low performance.
4.2.1 Structure of the Agent Program
Thestes
Thestes agent incorporates and processes the
information in the selection problem formulation
and other information sent by designer in
Perception
k
, in order to select a satisfactory solution
to be sent in Action
k
for the designer in order to
improve the performance of Agent, if necessary.
This interaction scheme between the designer and
Thestes should be continued until the rational
performance of Agent is considered satisfactory.
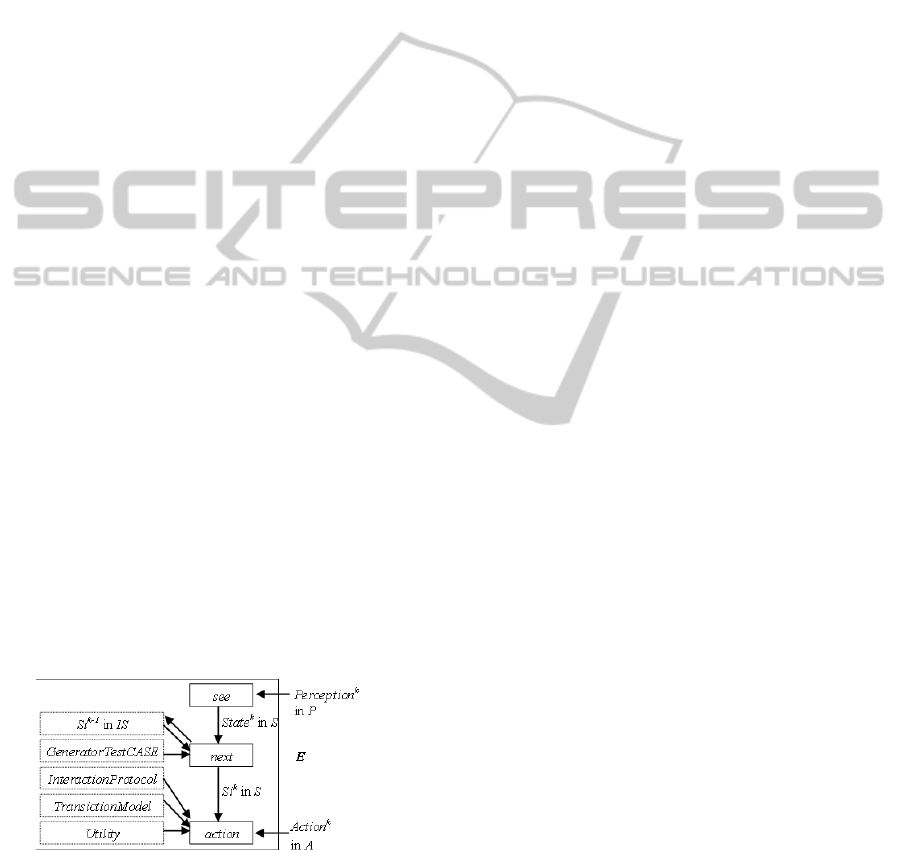
Figure 1 illustrates the structure of the problem
solving agent, Thestes. This structure consists in an
adaptation of the utility-oriented agent program,
specified by Russell and Norvig (2004), and
considering the abstract architecture of the agent
with internal state, specified by Wooldridge (2002).
Figure 1: Structure of agent program Thestes.
More specifically, the perception subsystem, see, is
responsible to map the information necessary to test
Agent in a computational representation, State
k
,
useful to the processing of the others two
subsystems (next and action): (Agent, Env,
ParametersSearch, ParameteresSimulation). The
subsystem next updates the internal state in State
k
,
and generates an initial set TestCASE. The set is
randomly generated or specific to test certain aspects
of the internal structure of Agent and, in order to
facilitate the next stage of decision make (action):
(TestCASE, Agent, Env, ParametersSearch,
ParametersSimulation).
Finally, considering the updated internal state,
the action function starts a process of local search in
order to find a satisfactory action Action
k
. This
function uses information about a state transition
model, ModelTransition, to generate new test cases
from TestCASE. In addition, the interaction protocol,
InteractionProtocol, and an utility function, Utility,
are used to, respectively, to obtain the histories
corresponding to test cases in the set and to evaluate
the performance of Agent in this histories.
Finally, the generated information by action
function, Thestes send to the designer important
information in Action
k
: (1) the current set TestCASE
as solution to the selection problem and the best
cases found by the solution, (2) the histories
corresponding to Agent in Env, (3) the performance
values, considering each objective in measure of
performance evaluation.
4.2.2 Transition Model
The transition model indicates the function that
modifies the set of test cases considering the test
cases in the current solution, Pop
t
= TestCASE.
Moreover, the model regards a transition model pre-
defined and the corresponding performance values,
measured by a Utility function to generate new test
cases, Pop
t+1
. The generic transition model considers
the NCases in a current set Pop
t
and chooses: (a) the
test case that will be modified, and (b) the changes
that have to be made in these cases.
Several transition models may be implemented to
achieve the above choices. In this paper the
implementation of the model is based on population-
based metaheuristcs using Genetic-Algorithm (GA).
Likewise, several transition models may be
implemented considering other population-based
metaheuristcs.
4.2.3 Simulation of Agent-Env Interaction
Thestes knows Agent and Env, as well as the
protocol InterationProtocol. In addition, the action
function considers ParametersSimulation in the
decision making process. Thus, it was conceived an
interaction mechanism that simulates the interactions
between Agent and Env, according
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
508

InteractionProtocol. The process starts when Env is
initialized with information of a test case (Case
i
TestCASE) and annotates the episodes
(Ep
k
(h(Case
i
)) PxA) of the history (h(Case
i
)
(PxA)
NInt
). Figure 2 shows the simulation.
Figure 2: Simulation of the interactions Agent-Env.
The mechanism set Env with information in PEnv
with a specific test case belongs to the current
solution set TestCASE. Then, Env stores this
information and send the information of the current
state in AEnv. The mechanism annotates this
information and forwards it to Agent, which
perceives in PAgent. Agent processes the
information and selects an action that is sent in
AAgent to the simulation mechanism. After that, the
simulation closes the annotation of a history episode,
and sends in PEnv the information about action to
Env. Other interaction can be started, which should
be repeated until the annotation of a full history.
4.2.4 Utility Function
During the generation of new test cases along the
search process, the Utility function enables the agent
to obtain performance measures considering the test
cases modified by TransitionModel. These measures
allow Thestes to evaluate the test cases and select a
subset of NCases that is better than the latter.
Thus, this first approach, considering that the
utility function is preferably independent, i.e., the
utility degree of a goal is independent of the values
assumed by the others, were incorporated in Thestes
two way of Utility function, i.e., a function additive:
Utilit
y
f
HTestCASE
u
f
H
TestCASE
,
(3)
and other in linear format, where w
m
0, m = 1,...,M.
Utilit
y
f
HTestCASE
w
∗f
HTestCASE
(4)
The selection problem of test case was reformulated
as:
‘maximize’ Utility(f
inad
(H(TestCASE)))
subject to: TestCASE ϵ P(Ω) e
H(TestCASE) ϵ
P
((PxA)
NInt
)
That is, considering that У = f
inad
(P(Ω)) is the
representation of the mapping of P(Ω) in the space
of objectives:: У = {y ϵ R
M
| y = f
inad
(H(TestCASE))),
TestCASE ϵ P(Ω) and H(TestCASE) ϵ P((PxA)
+
)};
the problem can be established as:
‘maximize’ Utility(y)
subject to: y У
5 EXPERIMENTAL
EVALUATION OF Thestes
AGENT
In this section, we illustrate the operation of Thestes
agent, solving a problem of test case selection. In
our experiments, two versions of the cleaner agent
were implemented: (i) simple reactive agent and (ii)
reactive agent with internal state. Both are evaluated
in an environment with multiples places rooms
considering the power and cleaning attributes,
according to Table 1.
5.1 The Environment and the Agent in
Testing
More specifically, the task of Thestes is to select a
set of environments formed by n x n places (Env)
which are satisfactory to test the cleaner agent
program based on condition-action rules (Agent). An
environment differs of others as regards the
localization and the amount of dirty places. Every
environment is partially observable, i.e., the cleaner
agent perceives the environment, but the see
function can only map the state of the place where
the agent is.
5.2 Tested Agents
The simple reactive cleaner agent program
(SR_Partial) focuses on the selection of actions
based on the current perception. Thus, the agent
ignores the historical perceptions obtained in a
partially observable environment, i.e., the see
function (SR_Partial) allows perceive only the state,
dirty or clean, of the current place. Figure 3 shows
the condition-action rules of SR_Partial.
Figure 3: Condition-action rules of SR_Partial.
if state is Dirty then do Aspire
if state is Clean then do random motion (Righ, Left,
A
bove, Below
)
AProblem-solvingAgenttoTestRationalAgents-ACaseStudywithReactiveAgents
509

The second agent program tested was designed
according to the structure of the reactive with
internal state with partially observable environment
(RIS_Partial). This agent has an internal state with
store the historic of perceptions that are considered
to the action selection process. Figure 4 shows the
condition-action rules of RIS_Partial.
Figure 4: Condiction-action rules RIS_Partial.
5.3 Problem-solving Thestes Agent
The Thestes agent presupposes the existence of a
current set TestCASE containing NCases of test,
which is an initial solution generated by next
function. The action function of agent considers four
main components: (1) TransitionModel of states that
operates on TestCASE to generate new sets, (2) a
utility function to evaluate the generated sets, (3) a
strategy to select from the evaluated sets a new
current set more useful, and (4) a test for the new
current set TestCASE, established in terms of
inadequacy associated with performance of Agent in
Env. This set is instantiated with each NCases in
current set, and the number of changes made until
the current interaction. This information is used to
decide if the action function can stop the process.
For the components (1), (3) and (4), notions of
genetic algorithm (Holland, 1975) are used. In (2) a
Utility function in linear format is used, as described
in Section 4.2.4.
In the context of GA, TestCASE, containing
descriptions of environment with n x n places, was
represented by a population, each individual encodes
an environment and each gene encode the place
state, in terms of dirt. The TransitionModel based in
GA considers TestCASE as a population that is able
to go through the steps of selection pairs (roulette
method), crossover and mutation. This process
promotes the evolution and allows the action
function to simulate, evaluates the utility of
individuals and composes a new population. To
prevent the loss of the best test case in the previous
generation, the elitism strategy is used.
5.4 Experiment with Thestes Agent
This section presents an experiment conducted with
Thestes. SearchParameters describes the size (n
2
)
and the amount (NCases) of environments in
TestCASE. The probability mutation (Mut), the
maximum number of executions (Kmax), and the
maximum utility value that can be achieved by a
history (Umax) are given. Information about Kmax
and Umax define the stop condition in the test.
Information in SimulationParameters describes the
maximum number of interaction between Agent and
Env in any simulation (Nint), i.e., the maximum
number of episodes in each history, and the number
of simulation realized in the same environment (Ns).
Table 2 presents this information.
Table 2: SearchParameters and SimulationParameters.
SearchParameters
SimulationPar
NCases n
2
Mut Kmax Umax Nint Ns
10 25 0,6 30 100000 25 5
The maximum number of interactions (Nint) of
Agent with Env, to be simulated in each of 10 cases
(NCases) in the population is 25. The maximum
utility value (Umax) is high, considering that the
stop condition in testing process of the search
strategy is defined considering the realization of 30
cycles of executions of action function (Kmax). For
each test case were realized five simulations (Ns).
Figure 5 presents the results produced by Thestes
using the Utility function in linear format, described
in Section 4.2.4. Values of equals weights to the two
goals (cleaning and energy) in evaluation measure
are given, i.e., w
L
= w
E
= 0,5, over 30 generations. In
(a) the results of SR_Partial and in (b) the results of
RIS_Partial are showed, respectively.
(a)
(b)
Figure 5: Utility value of TestCASE in generations.
if state is Dirty then do Aspire
if state is Clean and NotVisit(north) then do Above
if state is Clean and NotVisit(south) then do Below
if state is Clean and NotVisit(east) then do Right
if state is Clean and NotVisit(west) then do Left
if state is Clean and visited all then do random action
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
510
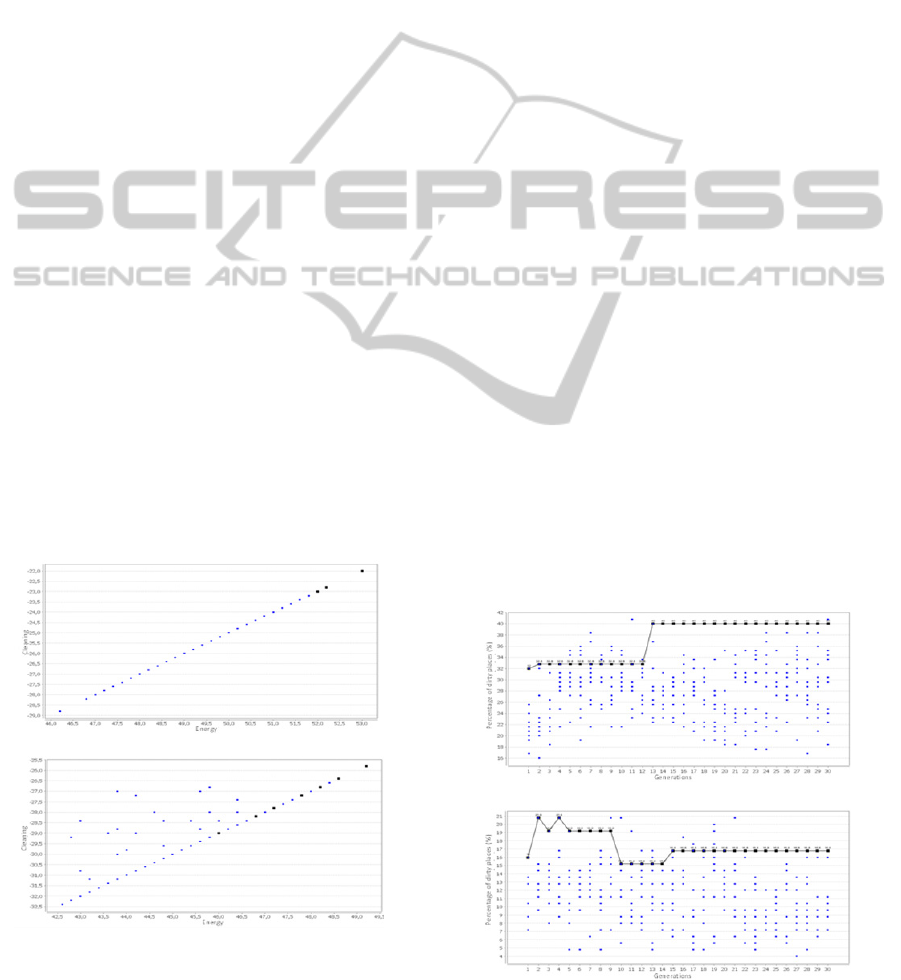
The nonlinear points represent the test cases in
TestCASE in each generation. The linear points
identify the best test case in the generation. In the
case of simple reactive agent with partial
observability (Figure 5 in (a)), the best test case was
obtained in the fourteenth generation, with utility
value equal to 15.5. This case was used as the
reference for the cases in TestCASE in the later
generation with utility values less than the best. In
case of the reactive agent with internal state (Figure
5 in (b)), the best test case was obtained in fifteenth
generation, with utility value equal to 11.7.
As expected, considering the utility values of the
best test cases, the Thestes agent appoints that the
more inadequate behavior to the simple reactive
agent, when compared with the reactive agent with
internal state. In this case, the annotation of the
places that were visited is useful to enable the
conception of a subsystem of decision making
(action) more refined. The set of rules in this case is
able to avoid the unnecessary visit to the places that
have been visited in previous interactions. This
behavior is not possible for the SR_Partial.
In the experiments, Thestes aims to select a set
satisfactory TestCASE. In this sense, in each
generation, the test case where the agent had the
most inadequate behavior is preserved, i.e., the
utility value is equal to the maximum value between
the 10 cases. Cases whose utility values are lower
than the minimum value are not important.
Figure 6 presents the values of the inadequacy
function related to cleaning and energy associated
with 10 test cases in TestCASE in 30 generations to
SR_Partial in (a) and RIS_Partial in (b).
(a)
(b)
Figure 6: Values of inadequacy of Cleaning and Energy.
Considering the test case in TestCASE with
higher utility value as shown in Figure 5, is possible
observe that for both the attributes, cleaning and
energy, shows in Figure 6, the simple reactive agent
with partial observability has more inappropriate
behavior, com -f
E
= 53.0 and -f
C
= -22.0, while the
reactive agent with internal state has a less
inadequate behavior with -f
E
= 49.2 e -f
C
= -25.8.
The simple reactive agent with partial
observability has limited vision of the environment,
the actions with it selects are not always rational.
For example, as the actions of motion are randomly
chosen, these actions do not always lead to the dirty
place closer, causing the agent spends more energy
than necessary and score at least in cleaning. As the
reactive agent with internal state stores the historic
of perceptions, the agent avoid the places previously
visited. Consequently, this agent selects best actions.
Considering that the two goals in the evaluation
measure have the same importance value (w
C
= w
E
=
0.5) in the utility function, the approach privileges
the cases in which Agent has a more inadequate
behavior in terms of consumption energy that in
terms of cleaning. This is justified because the
measure of performance evaluation scores
negatively in terms of energy all episodes for Agent
because the agent always expends energy to perform
your actions, and positively in terms of cleaning.
However, the increase of the number of dirty
places at the end of the interaction between Agent
and Env in the utility function minimizes the effect
mentioned previously and favors those cases where
the environment remained with greatest amount
dirty places. Figure 7 shows the percentage of dirty
places after 25 interactions between Agent and Env.
In (a) the results of SR_Partial and in (b) the results
of RIS_Partial are showed, respectively.
(a)
(b)
Figure 7: Percentage of dirty places in the TestCASE.
AProblem-solvingAgenttoTestRationalAgents-ACaseStudywithReactiveAgents
511

In general, Thestes selected test cases with higher
amount of dirty places at the end of the tests, which
are considered test cases with worse performance.
Table 3 illustrates five episodes about the
simulation of the interaction between Agent in Env,
in environment which obtain average utility value
for the SR_Partial.
Table 3: Partial history of Agent in Env.
k P
k
A
k
– av
E
(P
k
, A
k
) – av
L
(P
k
, A
k
)
1 ...,Clean,… Below 2.0 -1.0
2 ...,Clean,... Right 2.0 -1.0
3 ...,Clean,... Below 2.0 -1.0
4 ...,Dirty,... Aspire 1.0 -2.0
5 ...,Clean,... Left 2.0 -1.0
The environment selected is composed of places
with the following configuration: [[C, C, C, C, D],
[C, C, D, D, C], [C, D, D, D, D], [C, C, C, D, D], [C,
C, D, D, D]]. The utility value is U = 15.5 and the
values of inadequacy: –f
E
= 49.0 e –f
C
= -26.0. The
other episodes related to the history of Agent in Env
follow the same pattern. As expected, the cleaner
agent is more adequate to the environment
considering the cleaning objective than the energy
objective. A brief analysis of the condition-action
rules of the cleaner agent confirms this proposition.
The history obtained by RIS_Partial follows the
same pattern.
Thus, as expected, the cleaner agent with simple
reactive architecture and partial observability
presents the worst performance in the evaluation, to
realize a brief analysis in the condition-action rules
the agent not consider the perceptions and the
actions previous related to energy and cleaning
objectives. As the cleaner agent was designed as a
simple reactive agent, little can be done to improve
their performance. In this sense, an extension in its
structure is required in order to widen the
observability of the environment, allowing it to
choose actions better. Consequently, the agent will
be able to economize energy avoiding places has
been visited.
6 CONCLUSIONS
Considering which the rational agent should be able
to accomplish your goals, appropriate tests should be
developed to evaluate the actions and plans executed
by the agent when achieving these goals. In this
context, techniques that consider the peculiar nature
of the agent are required.
The proposed approach considers that in the case
of rational agents, where the measure of
performance evaluation is established by the
designer, multiple objectives, possibly conflicting,
must be considered. In the proposed approach, the
test results should indicate the average performance
of the agent and, especially, the goals that are not
being meeting, as well as information about the
stories of the agent, which are useful to identify the
agent behaviors that need to be improved.
The information generated by the approach
indicates a measure of utility associated with the
performance of the tested agent and objectives in the
evaluation measure that are not being satisfied.
Considering the best set of stories of the agent in the
environment, associated with the set of test cases
selected by the approach to end of the search
process, the designer and / or other auxiliary
automated systems can identify those problematic
episodes with are causing the unsatisfying
performance at the agent.
As future work, we suggest a case study with
objective-based and utility-based agents.
Additionally, adapt the approach to provide a testing
strategy capable of test the agent interaction in
multiagent systems.
REFERENCES
Holland, J. (1975) Adaptation in natural and artificial
systems. University of Michigan Press.
Houhamdi, H. (2011) “Test Suite Generation Process for
Agent Testing”, In: Indian Journal of Computer
Science and Engineering (IJCSE), v. 2, n. 2.
Mylopoulos J.; Castro J. (2000) Tropos: A Framework for
Requirements-Driven Software Development.
Information Systems Engineering: State of the Art and
Research Themes, Lecture Notes in Computer
Science, Springer.
Nguyen, C. D. (2008) Testing Techniques for Software
Agents. PhD Dissertation. University of Trento.
Nguyen, C. D.; Perini, A.; Tonella, P.; Miles, S.; Harman,
M.; Luck, M. (2009) Evoluctionary Testing of
Autonomous Software Agents. In: 8th Int. Conf. on
Autonomous Agents and Multiagent Systems.
Budapest, Hungary.
Nguyen, C.; Perini, A.; Bernon, C.; Pavón, J.;
Thangarajah, J. (2011) Testing in multi-agent systems.
Springer. v. 6038, p. 180-190.
Poutakidis, D.; Winikoff, M.; Padgham, L.; Zhang, Z.
(2009) Debugging and Testing of Multi-Agent
Systems using Design Artefacts. Springer Science
Business Media, LLC.
Russell, S.; Norvig, P. (2004) Inteligência Artificial: uma
abordagem moderna. 2 ed. São Paulo: Prentice-Hall.
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
512

Silveira, F. R. V.; Campus, G. A. L.; Cortés, M. I.
Rational Agents for the Test of Rational Agents. IEEE
Latin America Transaction, vol. 11, n. , feb 2103.
Wooldridge, M. (2002) An Introduction to MultiAgent
Systems. John Wiley & Sons Ltd.
AProblem-solvingAgenttoTestRationalAgents-ACaseStudywithReactiveAgents
513
