
Evaluation of Distance-Aware KinFu Algorithm for Stereo Outdoor Data
Hani Javan Hemmat, Egor Bondarev, Gijs Dubbelman and Peter H. N. de With
Department of Electrical Engineering, Eindhoven University of Technology, Eindhoven, The Netherlands
Keywords:
3D Reconstruction, Stereo Camera Depth Data, Voxel-Models, Camera-pose Estimation, Weighting Strategy,
Truncated Signed Distance Function (TSDF).
Abstract:
In this paper, we report on experiments on deployment of an extended distance-aware KinFu algorithm, de-
signed to generate 3D model from Kinect data, onto depth frames extracted from stereo camera data. The
proposed idea allows to suppress the Kinect usage limitation for outdoor sensing due to the IR interference
with sunlight. Besides this, exploiting the stereo data enables a hybrid 3D reconstruction system capable of
switching between the Kinect depth frames and stereo data depending on the quality and quantity of the 3D
and visual features on a scene. While the nature of the stereo sensing and the Kinect depth sensing is com-
pletely different, the stereo camera and the Kinect show similar sensitivity to distance capturing. We have
evaluated the stereo-based 3D reconstruction with the extended KinFu algorithm with the following distance
aware weighting strategies: (a) weight definition to prioritize importance of the sensed data depending on
its accuracy, and (b) model updating to decide about the level of influence of the new data on the existing 3D
model. The qualitative comparison of the resulting outdoor 3D models shows higher accuracy and smoothness
of models obtained by introduced distance-aware strategies. The quantitative analysis reveals that applying
the proposed weighting strategies onto stereo datasets enables to increase robustness of the pose-estimation
algorithm and its endurance by factor of two.
1 INTRODUCTION
Accurate 3D reconstruction and mapping has been ad-
dressed as a vital topic and is playing a prominent role
in such important research domains as 3D shape ac-
quisition and modelling, surface generation and tex-
turing, localization and robot vision (Engelhard et al.,
2011; Newcombe et al., 2011a; Steinbrucker et al.,
2011; Whelan et al., 2012a; Whelan et al., 2013).
During recent years, the advent of powerful general-
purpose GPUs has resulted in the first generation of
real-time 3D-reconstruction applications which use
depth data obtained from a low-cost depth Kinect sen-
sor (PrimeSense; Kinect; Asus) to generate 3D geom-
etry for relatively large and complex indoor environ-
ments (Newcombe et al., 2011b; Izadi et al., 2011;
Bondarev et al., 2013; Whelan et al., 2012b; Whelan
et al., 2012a; Whelan et al., 2013). Since the depth
sensor is based on projected Infra-Red (IR) patterns,
it is almost impossible to sense outdoor scenes during
daylight. This can be explained by the IR interfer-
ence of the sensor and the sunlight. While the Kinect
is unable to sense the outdoor environments, a stereo
camera can provide depth data for an outdoor scene
and can be potentially used by the KinFu algorithm to
reconstruct 3D model of outdoor environment.
The most prominent real-time 3D reconstruction
applications, such as KinectFusion (Newcombe et al.,
2011b; Izadi et al., 2011), Kintinious (Whelan et al.,
2012b), the open source KinFu (PCL, 2011) and
KinFu Large Scale (Bondarev et al., 2013), utilize
the low-cost depth sensor (Newcombe et al., 2011b;
Izadi et al., 2011) to sense the environment and re-
construct the corresponding 3D model based on the
TSDF voxel-model. While recent evaluation of the
Kinect intrinsics has revealed relative robustness to
ambient light, incidence angle, and radiometric influ-
ences, the important sensor limitation is the low ac-
curacy for large distance measurements (Chow et al.,
2012; Khoshelham, 2011; Khoshelham and Elberink,
2012). Since the default weighting strategy of the
TSDF model is not capable to preserve more accurate
data against less accurate data, an improved approach
has been proposed by introduction of weight defini-
tions and updating strategies (Javan Hemmat et al.,
2014a). The resulting improvements in model qual-
ity (Javan Hemmat et al., 2014a) and pose-estimation
accuracy (Javan Hemmat et al., 2014b) obtained by
these strategies, have motivated us to extend the ap-
746
Javan Hemmat H., Bondarev E., Dubbelman G. and de With P..
Evaluation of Distance-Aware KinFu Algorithm for Stereo Outdoor Data.
DOI: 10.5220/0004901507460751
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (PANORAMA-2014), pages 746-751
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

proach to the domain of stereo sensor data.
In this paper, we extend the capability of KinFu
to fuse data from stereo sensors, which enables 3D
model reconstruction of outdoor scenes. We evalu-
ate the impact of the distance-aware weighting strate-
gies on the quality of the resulting KinFu 3D model
obtained from the stereo-based depth data. For this,
we generate depth data from the input stereo camera
data and feed the depth data to the extended distance-
aware KinFu algorithm. Finally, we perform quanti-
tative and qualitative comparison of the obtained 3D
models against models generated by the conventional
KinFu algorithm.
The paper is structured as follows. Section 2 de-
scribes the extended weighting strategies. Section 3
elaborates on performed experiments. Section 4 pro-
vides analysis and discussion of the results. Section 5
concludes the paper.
2 WEIGHTING STRATEGIES
2.1 Conventional TSDF Model
In the original TSDF model (Curless and Levoy,
1996) of the conventional applications (Newcombe
et al., 2011b; Izadi et al., 2011; PCL, 2011), each
voxel contains a pair of distance value (D
i
) and ac-
cumulated weight (W
i
), describing the truncated dis-
tance value to the closest surface and the weight for
this value, respectively. This data structure enables
averaging of the captured depth data, influencing the
voxel model after i frames. For the (i+1)th depth
frame, the model is updated by the corresponding pair
of distance value (d
i+1
) and weight (w
i+1
) for voxel x,
using the following two equations:
D
i+1
(x) =
W
i
(x)D
i
(x) + w
i+1
(x)d
i+1
(x)
W
i
(x) + w
i+1
(x)
, (1)
W
i+1
(x) = W
i
(x) + w
i+1
(x) . (2)
Parameter d
i
is the calculated distance value for voxel
x based on the corresponding newly sensed valid
depth point, and w
i
is the weight of the depth d
i
.
Depth d
i
is integrated into the corresponding voxel x
based on Equation (1). The weight for voxel x is ac-
cumulated in W
i
according to Equation (2). Choosing
w
i+1
= 1 for each valid point found in the (i + 1)th
frame, results in simple averaging over time. Unfor-
tunately, according to our experiments, the constant
value for the weight affects the synthetic model up-
dating process in the following way. The objects in
the model located close to the sensor (≤ 1.5 m) are
created properly, while the objects located at a ≥ 2.5
m distance are being melted, significantly deformed
or even completely destroyed.
2.2 Distance-related weight Definition
and Updating Strategies
In this paper, we utilize the weight definition which
has been already proposed in (Javan Hemmat et al.,
2014a; Javan Hemmat et al., 2014b) to guarantee the
assignment of higher weights to points in the scene
located on closer distances to the sensor. Based on
the sensor features and scene characteristics, there is
a valid range for depth data, defined between a maxi-
mum and a minimum distance, d
max
and d
min
, respec-
tively. In addition, the weight is bounded between 0
and a maximum weight W
max
. The following equation
defines a weight based on the distance to the sensor,
specifying
weight
depth point
(x) =
1
d
(
x)
2
−
1
d
2
max
1
d
2
min
−
1
d
2
max
∗W
max
. (3)
For each depth value x with distance d(x) in the
valid range between d
min
and d
max
, the corresponding
weight is mapped to a value between 0 and W
max
.
In conventional TSDF model implementations,
the model is straightforwardly updated with constant-
weight strategy (weight value is unity). The weight
definition, introduced by Equation (3), enables us
to distinguish between closer and further distances.
Therefore, we can exploit this weight definition to in-
telligently update the TSDF model. The intelligent
update prevents more accurate values being overwrit-
ten by less accurate data. This updating strategy guar-
antees that the synthetic 3D model is updated by the
most accurate data available during the update pro-
cess.
Distance-Aware (DA) updating Method
Each voxel value in the synthetic 3D model is up-
dated based on a straightforward intelligent rule: “if
a voxel value has already been updated by a distance
value with a higher weight, never update it again by a
depth distance with a lower weight”. The DA updat-
ing method is formulated as:
Flag(v, x) = weight
new
(x) ≥ r% × weight
LMU
(v),
(4)
Update(v, x) =
Integrate x into v if (Flag(v, x)),
Discard x, keep v otherwise.
(5)
To make the updating method more robust to
noise, there is a tolerance range, r indicating a per-
centage with 0 ≤ r ≤ 100. Since the distance val-
ues are compared to r% of the last maximum updated
EvaluationofDistance-AwareKinFuAlgorithmforStereoOutdoorData
747

weight, the distance values less than the last max-
imum updated weight are therefore integrated into
the synthetic 3D model. This method integrates the
distance values close to the last maximum updated
weight affected by noise.
Due to intrinsics of the conventional TSDF imple-
mentation, the DA method suffers from fast satura-
tion of accumulated weight value, which limits proper
truncated-distance averaging over a long sensing pro-
cess. To eliminate this constraint, the DASS method
has been introduced as below (Javan Hemmat et al.,
2014a; Javan Hemmat et al., 2014b).
Distance-Aware Slow-Saturation (DASS)
updating Method
The DASS method performs similar to the DA
method, except for the weight accumulation. The
DASS uses the weight definition of Equation (3) for
the U pdate(v, x) function to conditionally update the
synthetic 3D model, similar to the DA method. How-
ever, in contrast with the DA method, the DASS uses
unity for the new weight w
i+1
, to calculate the weight
accumulation value W
i+1
. This solution of w
i+1
= 1
in the DASS method prevents the fast saturation of
the accumulated weight value, while the U pdate(v, x)
function ensures an intelligent updating process.
3 EXPERIMENTS
3.1 Implementation
To implement the proposed updating methods, we
have exploited the original framework of the open
source KinFu implementation from the Points Cloud
Library (PCL, 2011). We have reused the original
structure and only inserted the new definitions and up-
dating algorithms as discussed above.
3.2 Dataset
For datasets, we have chosen three outdoor statues lo-
cated in our campus and recorded them by a stereo
camera during daylight, which would not be possi-
ble with the Kinect sensor. We have generated depth
maps from the obtained stereo data and adopted the
maps to the Kinect depth format. Figure 1 shows the
statues and their corresponding depth frames.
3.3 Evaluation Approach
Due to absence of ground-truth models, the qual-
ity evaluation of models obtained from the original
KinFu, DA, and DASS methods is purely based on
visual assessment. It is known that in the KinFu al-
gorithm, a reset of the 3D modeling occurs in case
of large errors in the pose-estimation algorithm. The
pose-estimation accuracy is mutually dependent on
the quality of reconstructed model. Besides the qual-
itative issues, for a quantitative evaluation, we com-
pute the number of resets and also the endurance in-
terval length before the first reset occurs during the
3D reconstruction process, as an indicator of the pose-
estimation accuracy.
4 ANALYSIS AND DISCUSSION
According to the results shown in Figure 2, the most
interesting finding is that the KinFu-based 3D recon-
struction algorithm works well on the outdoor data
provided by a stereo camera, which is nearly impos-
sible to achieve with the Kinect sensor data during
daylight time.
Figures 2.B-D show that for all datasets, the DA
and DASS methods are able to preserve the model
and avoid deformation, in contrast with the original
KinFu algorithm. The original KinFu easily degrades
the model by overwriting the more accurate data with
less accurate data. This also proves that the stereo
depth data is clearly sensitive to the distance.
Comparing the DA and DASS methods, especially
for the third dataset (swordfish), we can conclude the
DASS method provides a more smooth and accurate
3D model. This can be explained by a fast saturation
of accumulated weights in the DA method, which pre-
vents proper temporal averaging of the depth data.
As a quantitative evaluation illustrated in Table 1,
the average number of resets caused by the DASS
method is significantly lower than the corresponding
numbers from the DA and original KinFu methods.
The reason for this reduction is the direct correlation
between the model quality and the pose-estimation
accuracy (Javan Hemmat et al., 2014b).
Another quantitative metric for model quality is
the endurance of an algorithm until the first reset oc-
currence. For this metric, the DASS algorithm shows
a higher performance and is able to sustain more than
twice longer than the original KinFu algorithm.
An interesting finding which has revealed during
the process, is the level of continuity of the stereo
depth data over different surfaces. In contrast with the
Kinect as a depth sensor based on the IR-projection,
the depth frames extracted from stereo data could
be less continuous on featureless surfaces, while the
Kinect is able to prepare continuous data as far as the
surface is not black or shiny. On the other hand, for
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
748

Table 1: Pose-estimation accuracy: comparison of the number of resets and endurance of the DA, DASS and KinFu methods.
Higher reset rates indicate lower accuracy in the pose estimation. The pose-estimation accuracy is mutually dependent on the
3D model quality.
Method metric Statue 1 Statue 2 Statue 3 Average
KinFu number of reset(s) 3 1 1 1.67
endurance (frames) 1,811 2,996 544 1,783.67
DA number of reset(s) 3 1 1 1.67
endurance (frames) 2,195 2,995 544 1,911.33
improvement (%) 21.20 -0.03 0.00 7.06
DASS number of reset(s) 0 0 1 0.33
endurance (frames) 5,604 3,801 544 3,316.33
improvement (%) 209.44 26.87 0.00 78.77
Figure 1: Snapshots of the modern art statues and their corresponding depth frame extracted from stereo data. The depth
frames depict the closer depth information as darker points.
the surfaces with sufficient visual features that absorb
or distract the IR projected patterns of the Kinect, the
stereo camera provides more continuous and smooth
depth data. This motivates a hybrid-sensing approach,
where both the Kinect and stereo sensors are deployed
in a single system setup, to increase reconstruction ro-
bustness of heterogeneous scenes.
5 CONCLUSIONS
We have experimented with the deployment of the
KinFu algorithm onto the depth input data obtained
from stereo sensors to enable 3D reconstruction of
outdoor scenes during daylight, which is an impos-
sible task with the Kinect sensor. We have evaluated
EvaluationofDistance-AwareKinFuAlgorithmforStereoOutdoorData
749
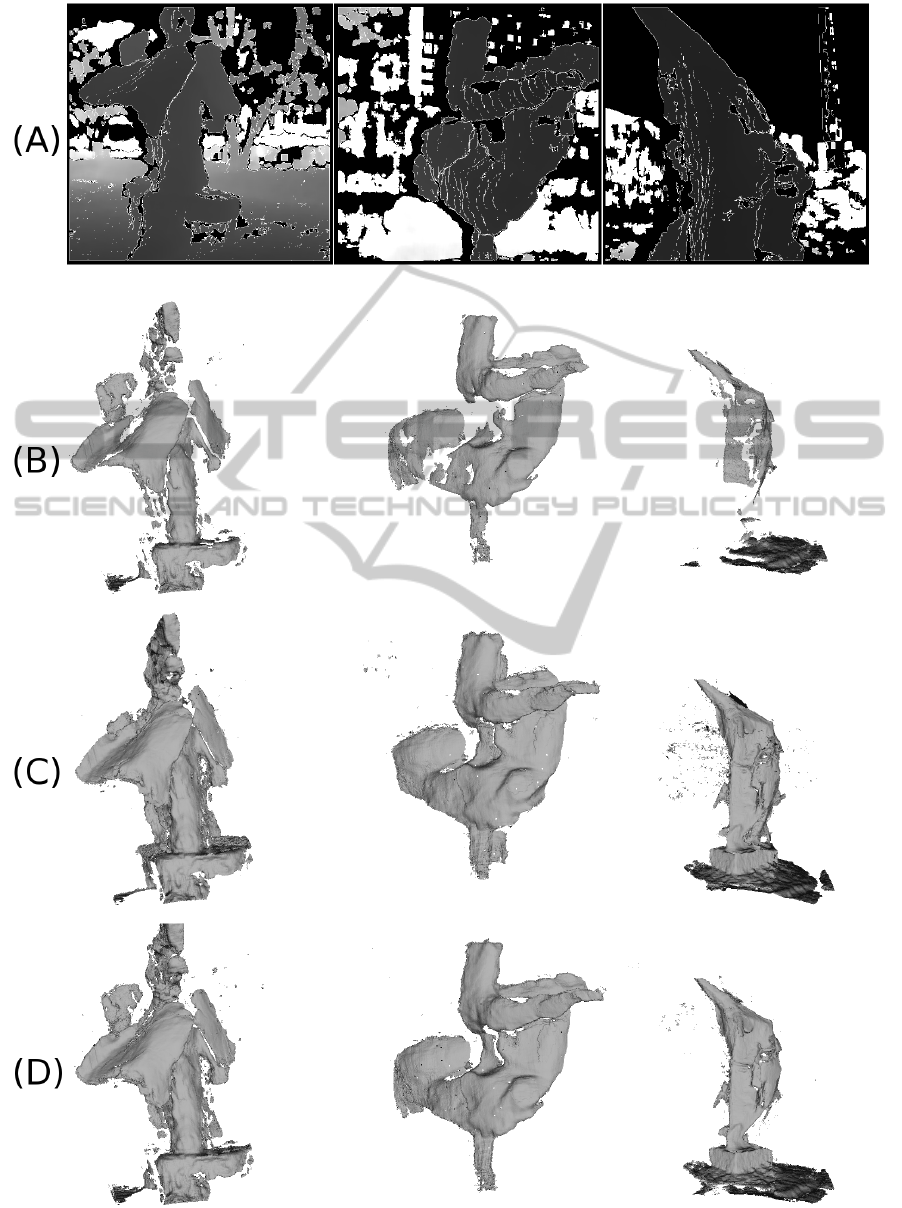
Figure 2: Mesh snapshots obtained by different weighting strategies. Each column shows the result for one of the datasets.
(A) shows a converted depth image in the format of the standard Kinect. (B), (C), and (D) illustrate the reconstruction results
from the original KinFu, DA, and DASS methods, respectively. Note the model degradation in (B) compared to (C) and (D).
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
750

the quality of 3D models reconstructed by the origi-
nal KinFu algorithm in comparison with our distance-
aware DA and DASS methods. The experiments have
revealed that the input from stereo sensors is valid
and sufficient for KinFu-based algorithms, resulting
in an appropriate reconstruction of outdoor scenes.
We have also shown that by replacing the original
KinFu weighting strategy by distance-aware weight-
ing strategies, we obtain 3D models from stereo
data with higher quality and more accurate pose-
estimation values. In our experiments, the new strate-
gies increase the endurance of the reconstruction pro-
cess with a factor of two or more.
Comparing the depth data obtained from the
Kinect and stereo sensors, we have found that the
stereo camera is able to provide more continuous
depth data for scenes with sufficient visual features
that interfere the IR patterns of the Kinect sensor, such
as black or shiny surfaces. Alternatively, the Kinect
can provide more continuous depth data for the sur-
faces with insufficient amount of visual features or
featureless surfaces, where stereo cameras are unable
to extract any depth information.
For future work, we plan experiments on finding
the optimal hybrid system capable of working in dif-
ferent environments in terms of the quantity and qual-
ity of visual and 3D features and intelligently fusing
the resulting data from depth sensor and stereo cam-
era, based on the scene configuration and features.
ACKNOWLEDGEMENTS
This research has been performed within the
PANORAMA project, co-funded by grants from Bel-
gium, Italy, France, the Netherlands, the United King-
dom, and the ENIAC Joint Undertaking.
REFERENCES
Asus. Xtion-PRO. http://www.asus.com/Multimedia/Xtion
PRO/.
Bondarev, E., Heredia, F., Favier, R., Ma, L., and de With, P.
(2013). On photo-realistic 3d reconstruction of large-
scale and arbitrary-shaped environments. In Con-
sumer Communications and Networking Conference
(CCNC), 2013 IEEE, pages 621–624.
Chow, J., Ang, K., Lichti, D., and Teskey, W. (2012). Per-
formance analysis of a low-cost triangulation-based
3D camera: Microsoft kinect system. In Interna-
tional Archives of the Photogrammetry, Remote Sens-
ing and Spatial Information Sciences, Volume XXXIX-
B5, 2012 XXII ISPRS Congress, Melbourne, Aus-
tralia.
Curless, B. and Levoy, M. (1996). A volumetric method for
building complex models from range images. In CM
SIGGRAPH Conf. Proceedings, pp. 303–312 (1996).
Engelhard, N., Endres, F., Hess, J., Strum, J., and Burgard,
W. (2011). Real-time 3d visual slam with a hand-held
camera. In RGB-D Workshop on 3D Perception in
Robotics, European Robotics Forum.
Izadi, S., Kim, D., Hilliges, O., Molyneaux, D., Newcombe,
R., Kohli, P., Shotton, J., Hodges, S., Freeman, D.,
Davison, A., and Fitzgibbon, A. (2011). Kinectfu-
sion: Real-time 3d reconstruction and interaction us-
ing a moving depth camera. In Proceedings of the
24th Annual ACM Symposium on User Interface Soft-
ware and Technology, UIST ’11, pages 559–568, New
York, NY, USA. ACM.
Javan Hemmat, H., Bondarev, E., and de With, P. (2014a).
Exploring distance-aware weighting strategies for ac-
curate reconstruction of voxel-based 3d synthetic
models. In MMM’14 Proceedings of Multi-Media
Modelling 2014 (will be presented) (2014).
Javan Hemmat, H., Bondarev, E., Dubbelman, G., and
de With, P. (2014b). Improved icp-based pose estima-
tion by distance-aware 3d mapping. In VISAPP’14,
Proceedings of 9th International Conference on Com-
puter Vision Theory and Application (will be pre-
sented) 2014.
Khoshelham, K. (2011). Accuracy analysis of kinect depth
data. In ISPRS workshop laser scanning / ed. by D.D.
Lichti and A.F. Habib., IAPRS XXXVIII-5/W12 (2011).
Khoshelham, K. and Elberink, S. O. (2012). Accuracy and
resolution of kinect depth data for indoor mapping ap-
plications. Sensors, 12(2):1437–1454.
Kinect, M. http://www.xbox.com/en-us/kinect/.
Newcombe, R., Lovegrove, S., and Davison, A. (2011a).
Dense tracking and mapping in real-time. In ICCV’11,
IEEE International Conference on Computer Vision,
Spain.
Newcombe, R. A., Davison, A. J., Izadi, S., Kohli, P.,
Hilliges, O., Shotton, J., Molyneaux, D., Hodges, S.,
Kim, D., and Fitzgibbon, A. (2011b). Kinectfusion:
Real-time dense surface mapping and tracking. In
Mixed and Augmented Reality (ISMAR), 2011 10th
IEEE International Symposium on, pages 127–136.
PCL (2011). Kinectfusion implementation in the PCL.
http://svn.pointclouds.org/pcl/trunk/.
PrimeSense. http://www.primesense.com/.
Steinbrucker, F., Sturm, J., and Cremers, D. (2011). Real-
time visual odometry from dense rgb-d images. In
IEEE International Conference on Computer Vision
Workshops (ICCV Workshops), pages 719–722.
Whelan, T., Johannsson, H., Kaess, M., Leonard, J., and
McDonald, J. (2012a). Robust tracking for real-time
dense rgb-d mapping with kintinuous. In MIT techni-
cal report, MIT-CSAIL-TR-2012-031.
Whelan, T., Johannsson, H., Kaess, M., Leonard, J., and
McDonald, J. (2013). Robust real-time visual odome-
try for dense RGB-D mapping. In IEEE Intl. Conf. on
Robotics and Automation, ICRA, Karlsruhe, Germany.
Whelan, T., Kaess, M., Fallon, M., Johannsson, H.,
Leonard, J., and McDonald, J. (2012b). Kintinuous:
Spatially extended kinectfusion. In RSS Workshop on
RGB-D: Advanced Reasoning with Depth Cameras,
Sydney, Australia.
EvaluationofDistance-AwareKinFuAlgorithmforStereoOutdoorData
751
