
A Multi-agent Intelligent System for on Demand Transport Problem
Solving
Mohamad EL Falou and Mhamed Itmi
National Institute of Applied Sciences, Rouen, France
Keywords:
On Demand Transport, Multi-agent System, Intelligent Transport.
Abstract:
In recent years, urban traffic congestion and air pollution have become huge problems in many cities in the
world. A possible investment in order to reduce congestion is to increase the number of passengers in vehicles,
and to decrease the number of vehicles on streets. This problem is defined as on demand transport (ODT)
problem. The ODT problem environment is defined by three components: the infrastructure of the city, the
vehicles and the drivers. Clients formulate requests for transportation from a pickup, to a drop off places.
These requests are received and must be served on real time by the set of vehicles, which require real time
environment updates. This paper is a first step to model the ODT problem as a multi-agent distributed planning
problem. Our model relaxes some definitions and reduces the complexity of the ODT problem to allow better
optimization.
1 INTRODUCTION
Research on new traffic information control and traf-
fic guidance strategies are particularly necessary and
important to reduce traffic congestion and air pol-
lution. The application of information technologies
such as multi-agent approaches to urban traffic in-
formation control has made it possible to create and
deploy more intelligent traffic management systems
such as ”On Demand Transport” ODT system’s.
A multi-agent system (Weiss, 1999) is an aggrega-
tion of agents, with the objective of decomposing the
resolution of a large problem into agents in which they
communicate and cooperate with one other. Multi-
agent simulation has been looked as an efficient tool
for urban dynamic traffic services. However, the main
problem is how to build an agent-based model for
such problem.
In this paper, we propose a multi-agent based
multi-layer distributed planning model for the real-
time ODT problem solving. In the proposed model, a
client submits a request to transport passengers from a
pick up to a drop off places. A pathfinder agent is de-
fined to find a path between places. One vehicle (resp.
driver) agent is associated per vehicle (resp. driver).
Agents collaborate to find vehicles to transport pas-
sengers and drivers to drive the vehicles.
The paper is organized as follows: next section de-
scribes related works. Section 3 describes the formal
framework of the ODT problem. Section 4 describes
the multi-agent modeling of the ODT problem. In
section 5 we define the agents for our problem do-
main and their cooperation strategy. Finally, section
6 concludes the paper and discusses the perspectives
and the future work.
2 RELATED WORK
The on demand transport problem, as defined in the
literature, has motivated a lot of studies of network
logistic problems in the last decade.
A set of algorithms for the vehicle routing and
scheduling with time window constraints are pre-
sented in (Marius, 1987). These algorithms use ap-
proximation and heuristics methods to offer solutions
for practical size problems.
(Savelsbergh and Sol, 1998) studied the problem
of finding the optimal way of assigning a set of trans-
portation requests to a fleet of vehicles, by minimiz-
ing a specific purpose objective function, subject to a
variety of constraints. Due to the complexity of the
problem, approximation and incomplete optimization
techniques as well as a sophisticated column manage-
ment scheme have been employed to create the right
balance between solution speed and solution quality.
(Lu and Dessouky, 2004) solved the pickup and
delivery problem with time windows using a branch-
552
El Falou M. and Itmi M..
A Multi-agent Intelligent System for on Demand Transport Problem Solving.
DOI: 10.5220/0004905405520558
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 552-558
ISBN: 978-989-758-015-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

and-cut technique, based on new valid inequalities
proposed by the authors. More recently, (Dumitrescu,
2005) provides several valid inequalities for solving
the traveling salesman problem with pickups and de-
liveries (TSPPD), establishing those among all known
inequalities that define facets of the TSPPD polytope.
Although many exact methods have been devel-
oped for solving variants of the on demand transport
(so called, pickup and delivery problem also in the lit-
erature), none of them actually avoid the complexity
of the problem, limiting their solution power to small
size problems. This evident drawback motivates the
development of good heuristics and/or the decompo-
sition of the problem, to solve medium and large scale
systems.
(Xu, Abdulrab and Itmi 2004) present a multi-
agent based multi-layer distributed hybrid planning
model for demand responsive transportation system.
This approach doesn’t model the problem in a decen-
tralized manner, but uses the A-globe agent platform
which provides a distributed environment to execute
its algorithms.
Finally, in (Bertelle, Nabaa, Olivier and Tranouez
2009) develop a decentralized approach based on the
optimization and negotiation between vehicles to re-
solve the ODT problem. Their goal is to face the lack
of service in certain zones or the over-concentration
of vehicles in certain other zones in a changing envi-
ronment.
To the best of our knowledge, the multi-agent ap-
proach modeling the ODT problem in the literature
does not give solution in real time and doesn’t sepa-
rate the driver from the vehicle. These drawbacks re-
duce the optimality performance of their approaches.
In this paper, we propose a new architecture to
solve the ODT problem. This architecture is a first
step to achieve its full optimization.
3 FORMAL FRAMEWORK
In this section, we give the formal framework of the
on demand transport problem.
Definition 1. Infrastructure: The infrastructure of
our system is defined by a graph G = (P,R) com-
prised by a set of nodes P = {p
1
,..., p
n
} designat-
ing the set of place in the city, and a set of links
R = {(r
1
,...,r
n
} designating the roads of the city.
Each road r
i
= p
i
(t
i
,d
i
)
−−−→ p
j
relates two places p
i
, p
j
where t
i
is the estimated time to cross r
i
and d
i
is the
distance between p
i
and p
j
.
Definition 2. Request: The client request is defined
by
R = ((init,t
init
)
n
passengers
−−−−−→ (goal,t
goal
),n
vehicle
,n
driver
)
where :
• init and goal are the pickup and the drop off
places,
• t
init
and t
goal
are the pickup and drop off time,
• n
passengers
: the number of passengers to be trans-
ported,
• n
vehicle
: the maximum number of times passengers
agree changing vehicle,
• n
driver
: the maximum number of times passengers
agree changing driver.
In the ODT system, a set of vehicles is defined.
In what follows we give the vehicle definition and its
associated information.
Definition 3. Vehicle: A vehicle is defined by (name,
capacity, place, cost, planning table) where :
• name: is the name of the vehicle,
• capacity : is the number of places in the vehicle,
• garage: is the garage place of the vehicle,
• cost: is the cost of using the vehicle per kilometer,
• planning table: is the planning table of occu-
pation of the vehicle per day. Each line in the
table is defined by (t,n
places
,travelers, drivers)}
where:
– t is the beginning time of a crossing a link l
i
between two places during day,
– n
places
is the occupied places in the vehicle dur-
ing l
i
,
– n
travelers
is the number of travelers during l
i
,
– driver is the driver of the vehicle during l
i
.
By defining the table planning for a vehicle, we
know at each moment the place of the vehicle
(which can be a node or a link), the number of
passengers and the vehicle driver.
Definition 4. Driver: a driver is defined by: (name,
cost, working place, working table) :
• name : is the name of the driver,
• cost : is the cost of the driver per hour of driving,
• working place is the working place of the driver,
• working table : contains the working time and the
occupation of the driver during a day. Each line
in the table is defined by (t,work, place,vehicle):
– t is the beginning time of a crossing a link l
i
on
day,
– work indicates if the driver works at time t,
– place indicates the place of the driver at t,
– vehicle is the vehicle conducted by the driver
during l
i
.
AMulti-agentIntelligentSystemforonDemandTransportProblemSolving
553

By defining the table planning for a driver, we
know at each moment its place (which can be a
node or a link), and the vehicle he conducts.
The table contains also the information if during
her/his working time, the driver has a vehicle to
conduct or is free.
Definition 5. Trajectory: a trajectory in the ODT
system is defined by
(init,start
1
)
v
1
,dr
1
−−−→ . .. (x
i
,start
i
)
v
i
,dr
i
−−−→ . .. goal)
where:
• path = init → ...x
i
... → goal is the list of places
crossed by the vehicles to reach drop off place
(goal) from the pick up place init,
• start
i
is the time of each transition in the path
• v
i
is the vehicle that takes passengers for the tran-
sition x
i
→ x
i+1
,
• dr
i
is the driver who drives the vehicle for the
transition x
i
→ x
i+1
.
After giving the preliminary definitions of the
ODT system, we now focus on the ODT problem.
Definition 6. On Demand Transport Problem: Let
us give an operational on demand transport system
defined by: an infrastructure, a set of drivers, a set
of vehicles and a set of trajectories. The ODT prob-
lem is defined by the client request and its solution
consists in finding the optimal trajectory to respond
to the client request.
3.1 Optimality in the ODT System
In this section, we discuss our vision of optimality
in the ODT system. Two optimality criteria can be
distinguished for a trajectory: the time and the cost.
Let Tra j = {tra j
1
,...,tra j
n
} to be a set of tra-
jectories and Req = {r
1
,...,r
n
} to be a set of re-
quests. We said Req satisfies Tra j iff ∀req ∈
Req,∃tra j ∈ Tra j/tra j is the response to req. We
note by time(tra j
i
) (resp. cost(tra j
i
)) the time (resp.
cost) execution of the trajectory tra j
i
.
Definition 7. ODT Optimality
let Tra j = {tra j
1
,...,tra j
n
} satisfying Req =
{r
1
,...,r
n
}.
ODT is timely optimal iff : ∀ Tra j
0
satisfying Req
1
,
∑
time(tra j
i
) ≤
∑
time(tra j
0
i
) where tra j
i
∈ Tra j
and tra j
0
i
∈ Tra j
0
.
ODT is costly optimal iff : ∀ Tra j
0
satisfying Req,
∑
cost(tra j
i
) ≤
∑
cost(tra j
0
i
) where tra j
i
∈ Tra j and
tra j
0
i
∈ Tra j
0
.
1
Tra j satisfies Req iff ∀r ∈ Req, ∃tra j ∈ Tra j which is
a unique solution to r in Tra j
Optimality Assumption
The development scenario of our ODT system is as
follows:
Firstly, the infrastructure of the system is defined,
the vehicles and the drivers are added. Then, the sys-
tem is activated to be requested by its clients. The
system receives and resolves the requests one by one.
When the system receives the first request, it responds
by the optimal trajectory. When another client sub-
mits a second request, the system can search the opti-
mal trajectory with (or without) allowing the change
of the first one.
Our position is to allow the change because our
objective is to have an ODT system that is optimal
(see definition 7) continuously.
We note that change in the ODT system is not only
due to the reception of new requests, but change can
be due to other factors such as:
• infrastructure: an accident or a work on a road
may change the infrastructure,
• vehicles: a vehicle breakdown can change its own
planning table.
• drivers: a driver can get sick which causes chang-
ing in its working table.
In these cases, the system must adapt its trajecto-
ries to remain operational and optimal.
As we said in the introduction, this work is a first
step to model the ODT problem as a multi-agent plan-
ning problem. So studying the optimality is out of
scope of this paper. All what we want to do here is to
open a new door towards a real-time ODT system.
4 MODELING AN ODT
PROBLEM AS A MULTI-AGENT
PLANNING PROBLEM
4.1 General Architecture
In this section, we model the ODT problem as a multi-
agent distributed planning problem. The architecture
of the multi-agent system is illustrated in Figure 1.
In the middle of the figure, we show the space of di-
alogue. The agents discussions are centered around
their own information (i.e. planning table), the infras-
tructure and the trajectories of the system.
In parallel of explaining each type of agents, we
show the life cycle of the client demand (from it’s ap-
pearance till the trajectory is calculated), and the role
of each type of agents to set the life cycle state.
In the multi-agent architecture, four types of
agents are distinguished:
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
554

• Client agent: the client agent acts as an interface
between the clients and the ODT system. IT sends
the client request (Definition 2) to the system, and
receives -if exists- the trajectory response (Defini-
tion 5).
The life cycle of the client demand starts with the
request produced by a client.
• Pathfinder agent: this agent is responsible of
finding for a request, a path between its pickup
and drop off places in the infrastructure of the sys-
tem.
• Vehicle agent: a vehicle agent is associated with
each vehicle in the system. Its role is to respond
if it can transport - partially or totally- passengers
through the path.
• Driver agent: a driver agent is associated with
each driver in the system. Its role is to respond if
it can drive -partially or totally-the vehicles asso-
ciated to a path (called vehicles-path in what fol-
low).
The details of how agents work and coordinate are
explained below.
4.2 Agents Coordination Strategy
The coordination strategy between agents is illus-
trated in Figure 1. Firstly, the client agent sends the
request to the pathfinder agent (1) which searches the
path between the pickup and the drop off places in
the infrastructure (2). Then the pathfinder submits the
path to the vehicle agents (3).
Each vehicle agent computes its contribution to
execute -partially or totally- the path, then the vehi-
cles agents collaborate to produce the vehicles-path
(4) or fail (5).
In success situation, the drivers agents take the
hand (4). Each driver agent computes its contribu-
tion to execute -partially or totally- the vehicles-path,
then the drivers agents collaborate to produce the tra-
jectory (6) or fail (7).
In the next sections, we define the details of each
kind of agents and their cooperation strategy.
5 AGENTS ROLES AND
COOPERATION
In this section we define the role of each agent in our
multi-agent model, and show how it coordinates with
other agents.
Before starting, we give some preliminary path
notations and properties.
The path produced by the pathfinder can be repre-
sented by:
path =
(init,start
1
)
t
1
−→ . .. (x
i
,start
i
)
t
i
−→ . .. goal)
,
where t
i
is the estimated time to cross the transi-
tion x
i
→ x
i+1
and start
i
is its starting crossing time
by a vehicle.
We define path
k
by
(init,start
1
)
t
1
−→ . .. (x
k
,start
k
)
. It is obvious that
the minimal time execution of path is t
path
=
n
∑
i=1
t
i
.
start
i
is introduced to express the possible delay
between crossing two successive transitions when
agents don’t have solution to execute the path without
wait.
There are multiple constraints to have a valid path
which are :
• t
path
≤ (t
goal
− t
init
). The request delay must be
greater than the minimal time path execution.
• t
init
≤ start
1
. The first transition crossing must be
after the pickup time.
• start
i
≥ start
i−1
+ t
i−1
. The starting time for the
i−th transition must be greater than achieving the
(i − 1)− th transition.
• t
path
+ delay
path
≤ t
goal
− t
init
, when delay
path
=
n
∑
i=1
(start
i
− (start
i−1
+ t
i−1
)). The time to cross
all the transitions with the possible delay must be
less than the sum of delays between the drop off
and the pick up places in the client request.
5.1 Pathfinder Agent
The pathfinder role is to find the path between the
pickup and the drop off places of the request (Defi-
nition 2). A number of classical graph search algo-
rithms have been developed to resolve the shortest
path problem on a weighted graph. Studying these
algorithms is out of scope of this paper. Readers in-
terested can be refereed to the two popular ones such
as: Dijkstras algorithm (Dijkstra, 1959) and A* (Hart,
Nilsson, and Raphael (1986)).
5.2 Vehicles Agents Coordination
Strategy
Now we explain how vehicles agents coordinate their
works to produce their best vehicles-path.
A central vehicle agent VA
c
is added to the vehi-
cles agents. It plays the role of an interface between
the vehicles agents and the other components of the
ODT system (pathfinder and driver agents), and man-
ages the coordination between the vehicles agents.
AMulti-agentIntelligentSystemforonDemandTransportProblemSolving
555
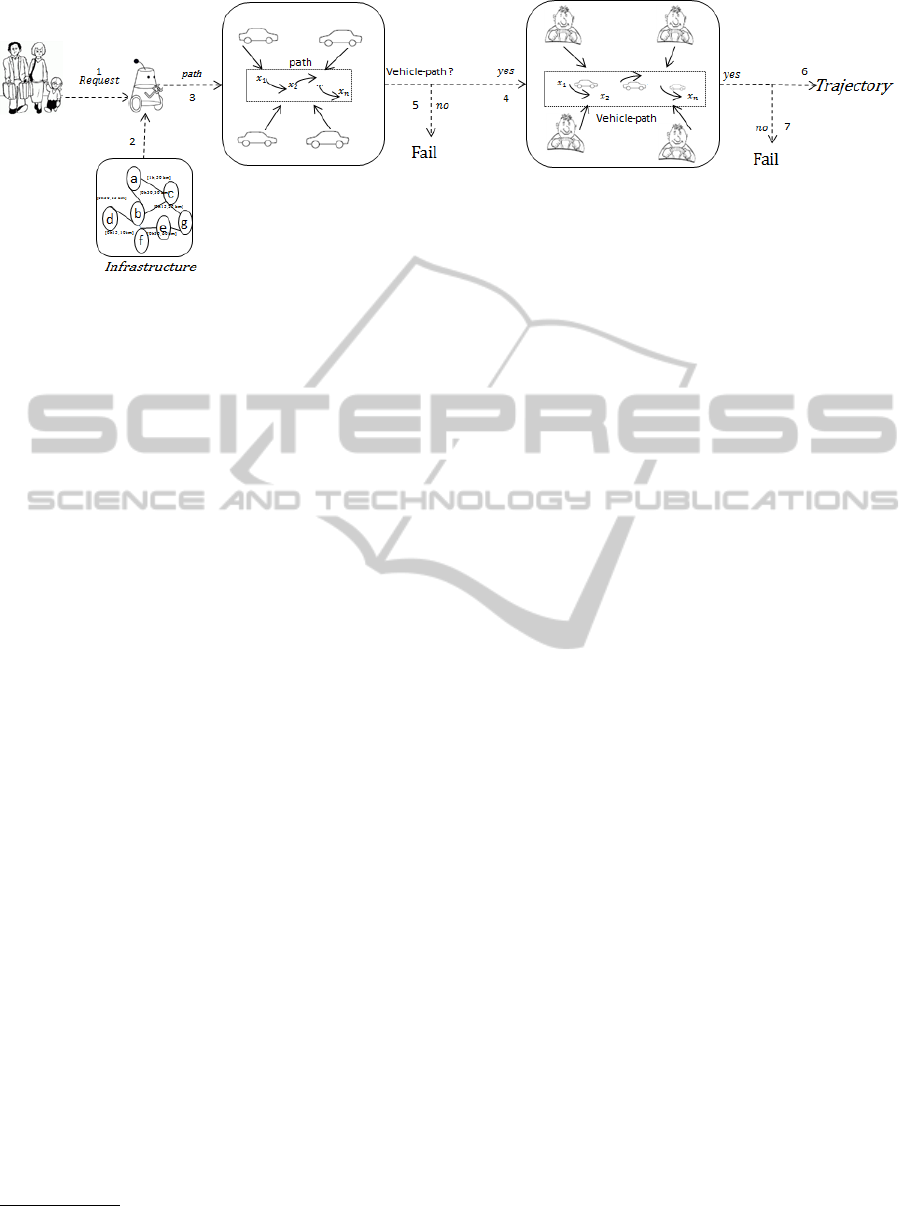
Figure 1: Agents coordination strategy.
When VA
c
receive the path = (init ··· → .. .goal)
from the pathfinder, it diffuses it to all the vehicles
agents < VA
1
,...,VA
n
>. Each one VA
i
responds
with its best partial vehicle-path
i
2
.
When VA
c
receives all agents responses, it
chooses the best one. Let vehicle-path
i
1
= (init ...
v
j
−→
...x
j
1
) be the best partial vehicle-path executed by
VA
j
.
Then, the central agent VA
c
notifies VA
j
to up-
date its vehicle planning table and diffuses the re-
mained part of the path (x
j
1
··· → .. .goal) to the
agents. This iteration is repeated until :
• reaching a step with empty remaining part of the
path. This means that vehicle agents success-
fully found a total vehicle-path which is equal to
the concatenation of intermediate partial vehicles-
paths. In this case, the vehicles-path is sent to the
drivers agents.
• vehicles agents doesn’t succeed to execute the
path totally means there is no solution for the
ODT system.
Finally, the central vehicle agent check that the
number of vehicles executing the path is less than
n
vehicle
of the request.
In the next section, we detail how the vehicle agent
responses to a path by a partial or total vehicle-path.
5.3 Vehicle Agent Work
Let us recall that the agent receives the
path =
(init,start
1
?)
t
1
−→ . .. (x
i
,start
i
?)
t
i
−→ . .. goal)
that is the response to the request R =
((init,t
init
)
n
passengers
−−−−−→ (goal,t
goal
),n
vehicle
,n
driver
).
Taking into account its planning table (see definition
3), the vehicle must respond with the sub-path path
k
2
The best vehicle-path is the one that includes the ma-
ximum number of transitions.
it can execute and at which time start
i
(1 ≤ i ≤ k) it
crosses each transition. The agent tries to execute the
maximum part of the path.
At the first step, the vehicle computes its free time-
slot T s = {ts
1
,...,ts
m
} between t
init
and t
goal
. Let
ts
i
= [a
i
,b
i
] and |t
i
| = b
i
− a
i
. From T s, we delete
intervals ts
i
having the number of free places in the
vehicle during ts
i
less than n
passengers
.
We should recall here that the vehicle is occupied
before each free time-slot. The vehicle searches for
the interval ts
i
that maximizes its proposed vehicle-
path.
ts
i
= argmax
ts
i
∈T s
(b
i
− a
i
) − t
path
x
i
→init
where :
• x
i
be the last place of the vehicle before a
i
,
• path
x
i
→init
the shortest path between x
i
and init
and t
path
x
i
→init
its associated execution time.
In selecting the maximal free time-slot, we must
take into account the time (t
path
x
i
→init
) the vehicle
needs to reach the init place to take passengers.
The agent vehicle-path response is path
k
where
k = argmax
k∈[1..n]
(
k
∑
j=0
t
j
≤ |b
i
− a
i
−t
path
x
i
→init
|
!
. This
means the computation of the maximum number of
transitions that can be crossed in the free interval, tak-
ing into account the time to reach init.
In this case, start
1
= a
i
+ t
path
x
i
→init
and start
j
=
start
j−1
+t
i
where 1 < j < k.
5.4 Driver Agent Work
The drivers agents receive from the vehicles agents
the vehicles-paths. They work and coordinate simi-
larly to vehicles agents to produce the trajectory solu-
tion.
A central driver agent DA
c
is added to the
drivers agents. It plays the role of an inter-
face between the drivers agents DA
i
and the
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
556

other vehicles agents and manages the coordina-
tion between the drivers agents.The vehicle path
(init,start
1
)
v
1
−→ . ..
v
m
−→ goal)
received from the
vehicles agents is diffused to the drivers agents. Each
one responds with its best partial trajectory
i
and the
best one is selected. The associated driver agent is
notified to update its driver planning table and the
remained part of the vehicle-path is diffused to the
agents, until finding the trajectory solution or fail.
Finally, the central driver agent checks whether
the number of driver executing the path is less than
n
driver
of the request.
5.5 Driver Agent
When a driver agent receives a vehicles-path equal to
(init,start
1
)
v
1
−→ . .. (x
i
,start
i
)
v
i
−→ .. .goal)
, it re-
sponds by the maximum number of vehicles that can
conducts.
Like the vehicle agents, the free time-slots are
computed and the one maximizing the number of ve-
hicles transitions is selected. Then, these vehicles
transitions are associated to the drivers.
6 CONCLUSIONS AND FUTURE
WORK
In this paper, we proposed a new multi-agent archi-
tecture to solve the ”On demand transport problem”.
Our model defines the problem as general as possi-
ble to produce the best solutions to a real operational
ODT system. This distribution of the solution com-
putation reduces its complexity and permits to have a
real time system. Due to the lack of space, we cannot
detail the complexity study of our model.
This work is a first step to solve the ODT problem
as a muli-agent problem. In the future, we must im-
plement our model and compare it to existing works.
Our architecture will be extended to ensure the
completeness and the optimality of the algorithm. In
our actual model, a solution may exist without being
found by the agents, and even if it is found, it is not
necessarily optimal. This is due to the lack of com-
munication between the agents.
The multicriteria optimization notion must be in-
troduced in the system. We also must study how to en-
sure the optimality of the ODT system continuously.
This means that when the system searches a new tra-
jectory, it allows to modify existing trajectories to-
wards a global optimization of the system.
Finally, we have to study how the ODT system re-
mains operational and optimal in real time, following
a change in an ODT component like: accident, roads
works, etc.
7 EXTENSION
This work deals with the transport of passengers.
However it may also serve for goods transportation.
An improved and adapted version of the proposed
approach can be the core of an intelligent transporta-
tion system. It involves users from transport compa-
nies, farmers’ associations, supermarkets, public au-
thorities, etc. in a system dedicated to Fruits and
Vegetables transportation for example. Each user will
be implemented as an electronic application (such as
web services). Each one will be connected to the
TOD system by an adapter to map between different
electronic business standards (UN/CEFACT, UBL,
NIEM, GS1, etc.) and the system.
ACKNOWLEDGEMENTS
This research is supported by the SEETFEL project
The Trans-Mediterranean Electronic Exchange Sys-
tem for Fruits and Vegetables. SEEFTEL is financed
by the French Government in the framework of ”In-
vestissements d’Avenir” (Investments in the Future).
REFERENCES
Weiss, G., 1999. Multiagent systems: a modern approach to
distributed artificial intelligence. MIT Press.
Dijkstra, E, 1959. A Note on Two Problems in Connexion
with Graphs. Numerische mathematik, 269-271.
Hart, P. and Nilsson, N. and B. Raphael, 1986. A formal
basis for the heuristic determination of minimum cost
paths. IEEE Transactions on Systems Science, and Cy-
bernetics, 100–107.
Marius, M., 1987. Algorithms for the vehicle routing and
scheduling problems with time window constraints.
Operations Research, 254–265.
Savelsbergh, M. and Sol, M. 1998. Drive: Dynamic Rout-
ing of Independent Vehicles. Institute for Operations
Research and the Management Sciences INFORMS,
474–490.
Lu, Q. and Dessouky, M. 2004. An Exact Algorithm for
the Multiple Vehicle Pickup and Delivery Problem.
Transportation Science, 503–514.
Dumitrescu, I., 2005. Polyhedral results for the pickup
and delivery travelling salesman problem. Centre de
Recherche Sur Les Transports, Universit
´
e de Mon-
treal.
Xu, I. and Abdulrab and H., Itmi, M., 2008. A multi-agent
based model for urban demand-responsive passenger
AMulti-agentIntelligentSystemforonDemandTransportProblemSolving
557

transport services. International Joint Conference on
Neural Networks, 3668-3675.
Bertelle, C. and Nabaa, M. and Olivier, D. and Tranouez, P.,
2009. A Decentralized Approach for the Transporta-
tion On Demand Problem. From System Complexity
to Emergent Properties, 281–289.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
558
