
Content-guided Navigation in Multimeric Molecular Complexes
Mikael Trellet
1
, Nicolas Ferey
1
, Marc Baaden
2
and Patrick Bourdot
1
1
VENISE group, LIMSI (CNRS), University Paris-Sud, Rue John Von Neumann, Orsay, France
2
LBT-IBPC (CNRS), University Paris Diderot, Paris, France
Keywords: Molecular Visualization, Constrained Navigation, Structural Biology.
Abstract: In the field of structural biology, molecular visualization is a critical step to study and understand 3D
structures generated by experimental and theoretical technics. Numerous programs are dedicated to the
exploration and analysis of structures in 3 dimensions. However, very few of them offer navigation
algorithms that deal in an intelligent way with the content they display and the task to perform. This
observation is emphasized in the case of navigation in immersive environments where users are immersed in
their molecular systems, without any spatial landmark to guide their exploration. Starting from this
observation, we propose to take into account some geometrical features found in multimeric molecular
complexes to provide navigation guides to the users during the exploration process. It is possible thanks to
the common symmetrical layout molecular complexes present. Beyond the biological meaning and
importance that symmetric layouts have in proteins, they allow us to orient and guide the exploration of
molecular complexes in an intelligent and meaningful manner. We present then a current work on the design
of navigation paradigms based on the content and the task for the molecular visualization.
1 INTRODUCTION
Structural biology can be split into several
indispensable steps that lead to the deciphering of
molecular complexes. One of these steps is the
visualization and exploration of molecular
structures. Several technics are able to generate
accurate 3-dimensional structures of molecules. One
can cite NMR and X-ray as well as molecular
modelling programs to be part of the top structure
generators. To fully understand the function and the
role that structure plays in molecular functions, no
one can pass by the visualization step. Broadly used
programs of molecular visualization display 3D
structures of molecules in a very efficient way.
However, only poor efforts were put in the
navigation paradigms use to explore such 3D
models. Two things can explain this: Firstly, until a
very recent period, molecular systems were quite
reduced in terms of size and their exploration did not
require any complicated algorithms. Secondly,
visualization of molecular systems in immersive
environments or with stereoscopic solutions was not
possible or very limited. However, these two points
are now outdated. It is now possible to generate
accurate models of molecular systems with more
than several hundreds of thousands of atoms.
Moreover, some laboratories investigate other ways
to render and interact with their 3D models. They
aim to put the scientist in the center of its
exploration, bringing the ensemble of his senses
focus on his task using multimodal rendering (Férey
et al., 2009). Stereoscopic solutions as well as
intuitive and natural ways to interact with a
molecular system are used in this purpose. Several
works on the intake of such immersive environments
for the scientific visualization have been made (Van
Dam et al., 2000). Numerous issues linked to the
navigation in immersive environments were
addressed along the last years (Christie et al., 2008)
but rarely by taking into account both the content of
the scene and the tasks that will be performed in it.
This immersion goes together with perception
issues. Several studies have been made to evaluate
the impact of immersive technics during the
exploration of virtual scenes. When dealing with
oriented and realistic environments, user comfort
can be quite well managed. However, the
exploration of abstract scientific data, where no
implicit or explicit orientations exist, raises several
issues when coming to the user experience and
efficiency. Simple navigation tasks can be perturbed
76
Trellet M., Ferey N., Baaden M. and Bourdot P..
Content-guided Navigation in Multimeric Molecular Complexes.
DOI: 10.5220/0004914300760081
In Proceedings of the International Conference on Bioimaging (BIOIMAGING-2014), pages 76-81
ISBN: 978-989-758-014-7
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
by a phenomenon called “cybersickness” (LaViola
Jr 2000), reducing significantly the user comfort and
his efficiency to perform a specific task in a virtual
environment. This observation is emphasized in the
context of interactive molecular simulations where
users manipulate the 3D structures during a
simulation in progress (Dreher et al., 2013).
Consequently, the need for alternative ways to
navigate in virtual environments has been
emphasized by Hanson et al. (Hanson et al., 1997)
who cited several families of navigation paradigms
increasing significantly the experience of the users.
Based on these different observations, we propose in
this study to bring new navigation paradigms aiming
to fill the gap between virtual and immersive
environments and molecular visualization. To do so,
we took into account the importance of geometry in
structural biology. Indeed, it has already been shown
that most of large 3D structures were constructed
around specific symmetry layouts (Goodsell and
Olson, 2000). Symmetry is not only a spatial feature
of these molecular complexes but also plays a
significant role on the stability and then the function
of such complexes. Our algorithm take as input the
symmetry of a multimeric complex and the
geometrical transformation between each monomers.
This symmetry can be manually set up or
automatically approximated using principal
component analysis to detect the main orientations
of monomers or by specific software dedicated to
this analysis (Kim et al., 2010). Such information are
good enough to provide a spatial basis to orient the
virtual world of exploration. Through the symmetric
nature of molecular complexes and by identifying
the tasks a scientist would have to perform in
molecular exploration, we will setup several
navigation paradigms aiming to improve the user
experience and efficiency.
2 CONTENT FORMALISATION
IN STRUCTURAL BIOLOGY
Development of camera models has to take into
account both the constraints linked to the
visualization in immersive conditions and the
navigation possibilities extractable from the
molecular complexes of interest.
The notion of symmetry is of first importance in
structural biology. As soon as a complex is formed
of more than two identical chains, a symmetric
configuration has significant chances to intervene in
the structuration of the monomers. These particular
layouts, found in large molecular complexes, play a
crucial role in most of the biological functions
accomplished by these structures. They are involved
in complexes stability but sometimes also in the
primary function of the complex itself. Many
transmembrane proteins present a pore where ions
will pass through to reach the inner or outer part of a
cell. Most of the times, this pore will be also the
exact symmetry axis of the protein. Each monomer
of the complex will present a symmetric
transformation to fit another monomer. Several types
of symmetries can be found among molecular
complexes and we listed some of them in the Figure
1. Each of them can be used as a base for a
navigation system since they provide a first step to
orient the complex. Any orientation of an abstract
element in a virtual scene brings a new spatial
landmark for the user and allows reducing the
discomfort that could appear when dealing with such
large and non-oriented structures.
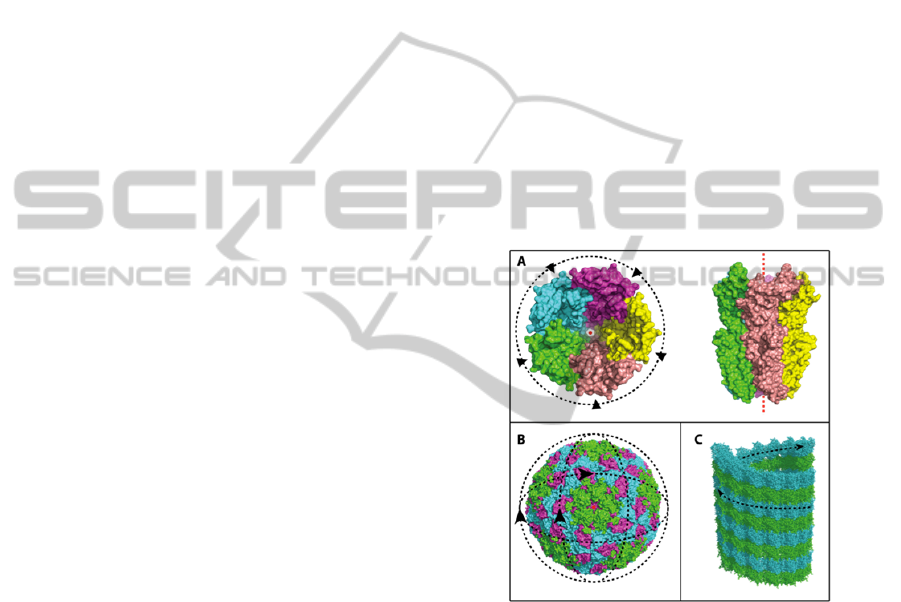
Figure 1: Several types of symmetries found in molecular
complexes. (A) GLIC, transmembrane protein composed
of 5 components with a single symmetry axis. On the left,
top view of the protein, on the right, transversal view. (B)
Virus capsid with two types of components presenting a
symmetry center overlaying the gravity center of the virus.
(C) Tubulins tangle shaping a microtubule with a screw-
like symmetry.
We already cited the axial symmetry and it is one
of the most represented symmetry among large
molecular complexes. The ensemble of monomers is
often organized in a circle manner around the
symmetry axis that is coincident with the pore of the
protein (Figure 1A).
Viruses present an important number of different
symmetries, most of them central but for which
angles and distances of rotation are very variable
Content-guidedNavigationinMultimericMolecularComplexes
77

and bring an important list of possible structures
(Figure 1B).
Molecular complexes presenting important
structural roles in the cell often adopt symmetries
called “helical” (Figure 1C). The transformation to
pass from one monomer can be associated to a
screw-like movement. We can take the example of
microtubules that are constituted of hundreds of
subunits called tubulin and arranged with each other
in a helical way. Microtubules are part of the cell
skeleton and are involved in maintaining structure of
the cell.
Despite their importance in the cell and the
numerous functions that we just cited in a non-
exhaustive manner, very few algorithms are
dedicated to the identification of symmetry axes or
centre in molecular complexes. Among them, only
SymD (Kim et al., 2010) is available online and can
be applied on a structural complex coming from a
PDB structure. SymD is based on a fitting and
permutation of monomers algorithm to identify the
symmetries. In spite of its relative efficiency, SymD
cannot deal with structures of more than 10 000
atoms and then misses most of the large complexes
with the most remarkable symmetries. Moreover, the
program outputs only symmetry axes when we saw
that several structures present central ones.
Symmetries being the starting point for the
conception of navigation guides that will be
described, the automatic detection of these
geometric features have been developed by the team
but will not enter in the scope of this study.
3 USERS NEEDS IN
STRUCTURAL BIOLOGY
3.1 Context Support
Visualisation of molecular complexes has been
brought to everyone’s hands thanks to numerous
programs like PyMol (DeLano, 2002) or VMD
(Humphrey et al. 1996). In order to assess our
navigation paradigms we chose to develop, in a first
step, a PyMol plugin based on python language and
using the API available for this program. Our choice
to use PyMol comes from the fact that PyMol is
recognized to be broadly used software in the
structural biology community and could be then well
evaluated by scientists of the field. Our
developments are, however, completely independent
of the visualization software used and we expect to
port the paradigm on a large-scale visualization
platform very soon. A short-term use case will see
the integration of our paradigm in the specific and
emergent case of visual analytics. This development
will take place in an immersive context represented
by a CAVE-like system. Together, the immersion
and visual analytics bring in the limelight the need
for proper algorithms addressing specific
navigations tasks that we listed in a non-exhaustive
way in the following section.
3.2 Navigation Tasks
The first steps of complex visualisation take place
through the external exploration of the overall shape.
These steps require a distant position of the camera
as well as a specific orientation of the complex for
the user. This orientation will be fixed during the
whole exploring process and any movements of the
camera will be made to avoid to the user to lose this
orientation setup with respect to the complex.
It is really difficult to visualise a specific region,
repeated along the different monomers of a complex.
Navigation without constraints makes the quick and
uniform observation of these regions almost
impossible. The movements to reach these regions
involve quick and precise motions to be performed
in order to simultaneously keep some spatial
landmarks and find the good point of view in the
middle of thousands of particles. The feeling to jump
from one monomer to the other in a smooth and
quite instantaneous way is particularly interesting in
the aim to compare binding sites or dynamic
structures involved in complexes stability. Selection
of similar and repeated regions of complex
monomers allows the extraction of atoms as graphic
objects used to perform certain standard geometrical
analyses like Root Mean Square Deviation (RMSD)
calculation. Several other comparisons like the
number of bonds among a region or the size of
binding pockets accessible for external links are also
elements used to study a complex. In the same state
of mind, distance between atoms or group of atoms
is indispensable when coming to protein studies.
On top of the sequential navigation along the
monomer, we cannot dissociate the importance of
the point of view a user will have to analyse the
region of interest. This is particularly true in the case
of regions completely embedded and hardly
accessible in the structure. We can then add an
algorithm to compute the best point of view from a
user position toward an interesting region.
As we already evoked, few molecular structures
present unique internal arrangements that participate
to their function. These functions are mainly
BIOIMAGING2014-InternationalConferenceonBioimaging
78

functions of passage where molecules of water or
ions are exchanged between the inside and the
outside of a cell membrane. This is made possible by
the presence of a pore that also plays the role of the
symmetry axis around which the different monomers
constituting the transmembrane protein stand. Pores
are then particular structural arrangements where
many biological events can take place and of a first
importance for scientists. They are really interesting
to visualize but not so easy to reach and follow
because of their burying state. We setup the
possibility to easily anchor the camera to the
entrance or exit of these biological “corridors” to let
the user explore them via specific navigation paths.
Proteins are structured in tertiary structures that
obey to specific rules, well known and identified for
several years. It is sometimes useful to explore these
geometrical patterns to value the shape and stability
of the proteins. We chose to use the metaphor of the
rollercoaster to minimize the interaction with the
user. In this setup, the user only controls the
movement speed and direction (forward or
backward) but neither the path nor the orientation.
4 CAMERA MODEL
Our model of camera must address the different
needs listed above in order to be pertinent for the
scientists. It will be done through but putatively
coupled navigation modes that we will describe
now.
4.1 Navigation Modes
When a centre or axis of symmetry is detected, the
molecular system is re-oriented to have its symmetry
axis merged with the axis {0, 1, 0} of the {x, y, z}
orthonormal reference. A translation is also applied
to merge the basis of the complex with the origin of
the coordinates system.
In a first mode of navigation that we could call
“simple exploration”, the camera is oriented in a
way that it always faces either the centre of
symmetry or the centre of the symmetry axis when it
is located at the complex level (Figure 2, area B). In
the external areas (Figure 2, areas A), camera up
follows the global vector model (Khan et al., 2005)
that keeps it fixed parallel to the symmetry axis if
existing or fixed in a way to keep the user head at
the same orientation with respect to the molecular
system. Movements along the 3 dimensions are
made in the same way, via the interaction with a
unique button associated to each direction {x, y, z}.
A translation along the camera forward will have a
“zoom-in”/”zoom-out” effect.
Figure 2: Schematic view of navigation paths and camera
orientations with a symmetry axis (purple). The molecular
complex is coloured in orange, areas A are outside the
structure whereas area B encompasses the ensemble of the
structure along the y axis. Each example of a camera
position is associated to a number from 1 to 5. The camera
forward is in green and the camera up in black.
A right translation will perform a turn around the
structure while keeping the same distance between
the camera and the symmetry centre. Finally the user
will have the possibility to go up and down along an
axis parallel to the symmetry axis in area B (Figure
2, position 1) but will fly over the top or base of the
complex when in areas A (Figure 2, position 2).
During the hovering of one of the complex
extremity, the camera forward will be focus on the
closest complex extremity.
At the intersection between the hovering
trajectory and a symmetry axis, a new mode of
navigation can be activated and will give the
possibility to navigation along the symmetry axis
(Figure 2, position 3). In this mode, the camera up
will be kept in the same direction that it was when
the user was flying over the structure to avoid any
navigation issues in terms of orientation losses.
When the user is inside the complex, along the
symmetry axis, we let the possibility to change the
navigation mode for a free 360-turn around a
specific position (Figure 2, position 5). In this mode,
the camera forward will not be confounded with the
symmetry axis anymore but will be perpendicular to
it. The camera up will be along the axis and the user
will have the possibility to look in every direction
from his position. The movement might be
associated to the one of a panoramic elevator
Content-guidedNavigationinMultimericMolecularComplexes
79

allowing the exploration of the internal structure of a
protein.
To answer the basic needs of the field experts,
the possibility to target a specific region of a
monomer can be split into 4 successive steps:
1. Constrained navigation as illustrated in
Figure 2 to face the interesting region.
2. Selection of the interesting area and best
point of view computing.
3. Memorisation of the point-of-view
information in terms of camera parameters.
4. Jump to the following monomer thanks to
the symmetry information.
4.2 Accessibility Computing
The previous navigation mode includes a research of
an optimal point-of-view relative to an interesting
area pointed by the user. This algorithm operates in
the following way: Starting with the center of an
area identified by the user, a sphere is created
around this point with a radius matching a
configurable distance between the camera and the
target. From each element of the sphere surface, a
ray is cast toward the target. If a ray crosses a cell of
the grid with an atom in it, the grid element
corresponding to a surface starting point is
considered as occulted.
Figure 3: Grid splitting of the region surrounding an atom
of interest (green). Each neighbouring atom (red)
constitutes an occlusion for the camera view. The optimal
point-of-view cones are represented in blue.
At the end, each element of the surface is
associated to a 2D table and we extract the area with
less occulted neighbors (Figure 3). The centers of
these areas, once re-transformed into 3D
coordinates, yield the observation points with the
least occlusions to observe the target. The user is
then able to choose among the optimal points of
view calculated by modifying the position and the
orientation of the camera.
This accessibility grid can also be used to follow
the shape of protein surfaces or membranes. In this
mode, the camera up is aligned on the surface
normal and any movement can be associated to
navigation on a ground where the user is limited to 2
dimensions control with a freedom degree of
rotation around the camera up axis.
4.3 Structures Manipulation
The algorithm of optimal point-of-view reaches
some limits when we come to protein areas
completely buried into the structure or at the
interface of two monomers. In these situations,
accessibility is null and there is no simple algorithm
to visualize these regions. Based on this observation,
we went further in the use of the symmetric layout
found in molecular structures. In order to put into
light hardly accessible regions, we decided to
change the 3D structure of our proteins. The user is
able to control the 3D modification to fit his wishes.
Some translational movements are applied to each
monomer in order to further them from each other
and then free several regions that were previously
hidden in the structure (Figure 4). By a simple
interaction with a button or by letting the program
computes the movement automatically according to
the camera position we can move the monomers
away along an axis starting from the symmetry
centre/axis to the monomer centre of mass.
Figure 4: Top view of GLIC protein. (A) Default layout of
the different monomers. (B) Spreading of the different
monomers by translation with respect to a vector linking
the symmetry axis centre to each monomer centre of mass.
BIOIMAGING2014-InternationalConferenceonBioimaging
80

5 CONCLUSIONS
Immersion for molecular exploration brings an
interesting dimension for the study of certain
biological events. However, it also brings some
navigation issues that can be easily extended to
desktop environments. Without any specific
navigation paradigm, the exploration of abstract and
scientific data can easily lead to significant spatial
landmarks losses and then decrease the user
experience and efficiency. To tackle this problem,
navigation guides can be quickly setup. They are
based on the most common feature that most of
molecular complexes of a certain size share, a
symmetric layout geometrically connecting the
monomers between them. But beyond the simple
comfort of the user, if correctly implemented, the
constraints extracted from any centre or axis of
symmetry can also become useful helps for the
execution of daily standard tasks in structural
biology.
Next steps will be the evaluation of our paradigm
by structural biology experts. We will base our
assessments on the broadly accepted evaluation
benchmark proposed by Bowman et al (Bowman et
al., 1997). The criteria used to assess the navigation
paradigms group, in a non-exhaustive way: the task
execution speed, its accuracy, the user spatial
awareness in the virtual scene during and after the
experience, the comfort of the user, etc…
It is important to notice that our paradigms are
completely independent of the navigation technic or
the visualisation system used. Indeed, they can be
applied from immersive environments like CAVE
systems to desktop ones and with mouse/keyboard
as well as 3D mice or tracking solutions (Chen et al.,
2013). A navigation control can easily be substituted
to one other while keeping a behaviour consistency
of the camera defined in function of the scene
content.
REFERENCES
Bowman, D. A., Koller, D. & Hodges, L. F., 1997. Travel
in immersive virtual environments: An evaluation of
viewpoint motion control techniques. In Virtual
Reality Annual International Symposium, 1997., IEEE
1997. pp. 45–52.
Chen, W. et al., 2013. 6DoF navigation in virtual worlds:
comparison of joystick-based and head-controlled
paradigms. In Proceedings of the 19th ACM
Symposium on Virtual Reality Software and
Technology. VRST ’13. New York, NY, USA: ACM,
pp. 111–114.
Christie, M., Olivier, P. & Normand, J.-M., 2008. Camera
Control in Computer Graphics. Computer Graphics
Forum, 27(8), pp.2197–2218.
DeLano, W. L., 2002. The PyMOL molecular graphics
system.
Dreher, M. et al., 2013. Interactive Molecular Dynamics:
Scaling up to Large Systems. Procedia Computer
Science, 18, pp.20–29.
Goodsell, D. S. & Olson, A. J., 2000. Structural symmetry
and protein function. Annual review of biophysics and
biomolecular structure, 29(1), pp.105–153.
Férey, N. et al., 2008. User needs analysis to design a 3D
multimodal protein-docking interface. In Proceedings
of the IEEE Symposium on 3D User Interface,
3DUI'08, pp.125–132.
Hanson, A. J., Wernert, E. A. & Hughes, S. B., 1997.
Constrained navigation environments. In Scientific
Visualization Conference, 1997. pp. 95–95.
Humphrey, W., Dalke, A. & Schulten, K., 1996. VMD:
visual molecular dynamics. Journal of molecular
graphics, 14(1), pp.33–38.
Khan, A. et al., 2005. HoverCam: interactive 3D
navigation for proximal object inspection. In
Proceedings of the 2005 symposium on Interactive 3D
graphics and games. pp. 73–80.
Kim, C., Basner, J. & Lee, B., 2010. Detecting internally
symmetric protein structures. BMC bioinformatics,
11(1), p.303.
LaViola Jr, J. J., 2000. A discussion of cybersickness in
virtual environments. ACM SIGCHI Bulletin, 32(1),
pp.47–56.
Van Dam, A. et al., 2000. Immersive VR for scientific
visualization: A progress report. Computer Graphics
and Applications, IEEE, 20(6), pp.26–52.
Content-guidedNavigationinMultimericMolecularComplexes
81
