
Smart Moving Nightstand
For Medical Assistance of Elderly People an Open Project
Nicolas Soucies
1,2
, Jeremie Girouard
2
and Nizar Ouarti
1
1
Institute des Systemes Intelligents et de Robotique, Universite Pierre et Marie Curie, 4 place jussieu, Paris, France
2
Alten, 221 Boulevard Jean Jaurès, Boulogne-Billancourt, France
Keywords: Elderly People, Health, Remote Sensors, Zigbee, Robot, Open Platform.
Abstract: We present an open mobile platform that aims to benefit from versatile wireless sensors. This mobile
assistant is a robot that can monitor different physiologic data for elderly people. Moreover it has the ability
to determine the distance and potentially the position of the elderly person who use it. As an assistant it can
transport some “objects” as glasses or drugs. Preliminary results show the proof of concept of our approach
with a remote sensor that measures the temperature of the subject. We also present a method to assess the
quality of the RSSI signal in order to determine the distance of a zigbee module attached to the arm of the
subject. These results are the first steps towards a totally autonomous system that is an open platform. In
this platform it will be easy to highlight the interaction or the correlation between the different physiological
data and to move the robot properly in case of alert. It is possible to program different services and to
integrate new sensors remotely. This platform can be convenient for developers and researchers involved in
health technology.
1 INTRODUCTION
In recent years the number of elderly people isolated
at home continues to grow. These people often have
need for medical monitoring and have difficulty to
open outward. One of the solutions is to develop
connected medical sensors to remotely monitor
physiological and medical data. The variety of
available physiological sensors allows to consider a
large number of diseases, including non-
exhaustively:
Automatic blood pressure sensors are now
available which send the data, either wired or
wireless to a smartphone or a computer (Isais et al.,
2003).
Any apparatus that measures the concentration of
sugar in the blood are using the same techniques; it
is imperative to remove the patient's blood on a test
strip. Some of these devices can transmit data via a
USB cable or wirelessly.
There are two ways to achieve the pulse
measurement, with an electrocardiogram (ECG) or
an oximeter. The ECG is generally composed of a
transmitter unit includes a belt worn around the
chest and comprising electrodes for sensing the heart
beat and to transmit information to a receiver, which
can be worn the wrist like a watch. Using this
system can be complicated for elderly people. The
alternative is pulse oximeter which measures the
quantity of oxygen in the blood at the finger. The
measurement of the variation of oxygen in the blood
is an indirect indicator of the pulse rate.
Thermometers are classic physiological sensors
widely used at home. But there is an added value to
be able to record temperature regularly for
monitoring the evolution of temperature. Moreover
some new thermometers were recently design that
can measure the temperature with no contact. The
principle is simply to record the infrared radiation
from the heat source and to convert it in
temperature.
The main drawback of these systems is the
constraint to access the data one by one. Based on
this issue, some researchers proposed the project the
E-Health with the purpose to connect several
physiological sensors to one platform. It consists of
a "Cooking Hacks" card, which is used to interface
all medical sensors, associated with either a
"Arduino" card or a "Raspberry Pi" card. On this
platform, it is possible to connect up to nine medical
sensors. Physiological data can be sent via WiFi,
Bluetooth, 3G, GPRS or ZigBee. In addition to
517
Soucies N., Girouard J. and Ouarti N..
Smart Moving Nightstand - For Medical Assistance of Elderly People an Open Project.
DOI: 10.5220/0004915505170522
In Proceedings of the International Conference on Health Informatics (HEALTHINF-2014), pages 517-522
ISBN: 978-989-758-010-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

providing a hardware architecture, the project also
provides all the software part implemented in C + +.
To ensure code compatibility between the two
architectures, developers have chosen to use the
library "ArduPi".
The principal drawback of this project is the
connection with specific sensors that are dedicated
to the project. Moreover, even if the data can be
processed remotely, the acquisition by sensors is
done with wires. These connections not provide a
convenient ergonomics and limit the number of
possible sensors. Another limitation is the absence
of procedure in the case the patient is experiencing a
serious crisis not allowing him to call for help.
Moreover a disease can be detected earlier by the
correlation of different physiological data. An
automatic system allowing to one hand to centralize
and process the data, and to another hand to move to
the patient to observe his condition, would allow to
send an alert to a health’s professional or the family
to alert them. Another possibility is that the patient
can talk with his relatives and health’s professional
to reassure them in case of false alarm. This kind of
task could usefully be done by a robotic assistant.
Today there are many robots that were developed
to assist people.
Some robots are human’s assistant, but are not
natively equipped with physiological sensors. This is
the case of JAZZ robot, whose main application is
telepresence. It may, in some cases, allow a doctor
to visually observe a patient without being
physically present on the site. The robot Kompaï, for
its part is designed to support the elderly in a home
environment. This robot focuses on multimedia
features and non-medical application. ASIMO is a
robot equipped with technologies that give it a
genuinely independent action. Its name is an
acronym for Advanced Step in Innovative Mobility.
Asimo is an autonomous robot capable of
determining his behavior in unpredicted situation.
Thus, it can coexist with humans. Autonomy allows
him to decide to change his path to avoid a collision
with another person. In some circumstances, his
faculties are superior to those of men. For example,
it is able to track multiple conversations
simultaneously (Mutlu et al., 2005); (Sakagami et
al., 2002).
In contrast, other robots are connected to
physiological sensors. This is the case of the robot
RP-Vita Remote Presence is a medical robot mobile
telepresence designed to be used primarily in a
hospital and communicate with medical instruments
connected to it. It helps to have several medical
officers in connection who may have access to all
information on the equipped patients. This
comprehensive platform is exclusively available to
hospitals. It requires that the hospital has to be
equipped with hardware that can communicate with
the robot and the platform is not suitable for home
use. In this category of robots one can quote
HealthBots that is a project aiming to measure some
physiologic data, but the drawback is that the robot
uses some dedicated sensors (Jayawardena et al.,
2010); (Jayawardena et al., 2012). Another
orientation is the one taken by Robo MD which is to
combine the mobility of a Nao robot with sensors
networks. This approach is mainly oriented to
provide an alert in case of falls situations (Van de
Ven et al., 2010).
The aim of this study is to develop a medical
assistant robotics for elderly people. It seems
essential for such an assistant to have physiological
sensors in large numbers. We decided to connect the
physiological sensors with a ZigBee connection, this
strategy has many advantages. Firstly it allows to be
connected wirelessly with the platform, it also
multiplies the number of accessible sensors, and
then it can detect diseases more accurately by the
correlation of physiological signals by identifying
the type of sensor. An assistant must be able to both:
use multimedia resources in an emergency to
communicate with the older person or to observe his
condition visually. Moreover, given the constraints
due to the humanoid form that greatly complicates
the mechanics of a system; we opted for a more
rudimentary design that can be better accepted by
the elderly. This is the concept of "smart moving
nightstand". This platform is developed to allow an
elderly person to be autonomous while being
connected to the outside world (family and doctors).
It would also carry essential items such as
eyeglasses or medications of any user by monitoring
its essential physiological variables. It is a new open
platform for developers interested to compute
physiological data and offers the services of wireless
robotic assistant.
2 SYSTEM OVERVIEW
The system can be divided into 6 main parts (see
Figure 1: Hardware block diagram of the platform.):
• The wireless communications with Zigbee and
WiFi.
• Medical sensors (scalable to the needs of the user)
• The multimedia part that plays the role of user
interface.
• The processor (SOC ARM 32 bit)
HEALTHINF2014-InternationalConferenceonHealthInformatics
518
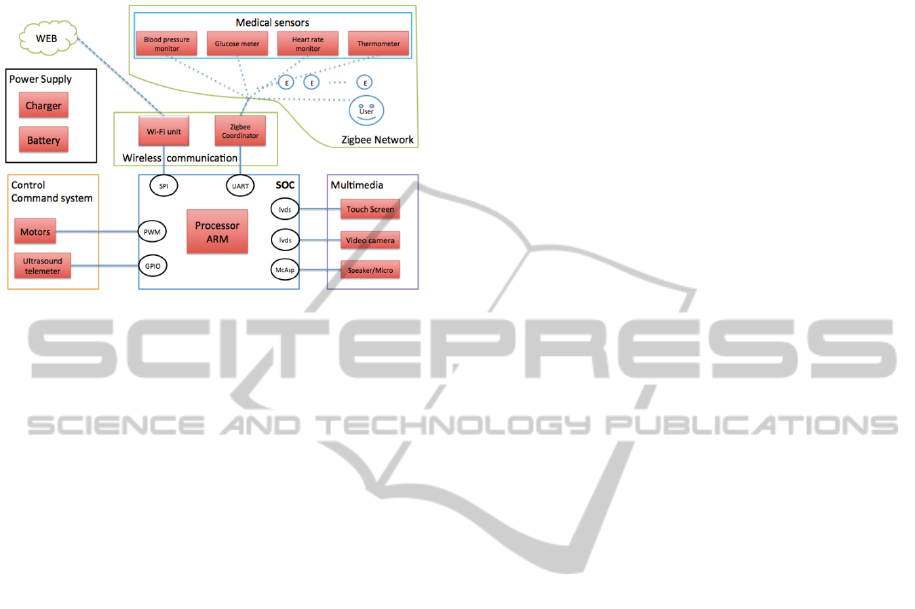
• The motor control to move the robot.
• The power to the battery and charging station.
In this study we focus on the first two issues.
Figure 1: Hardware block diagram of the platform.
2.1 Concept
The principle behind this intelligent platform is that
it can blend in with its environment. The aim is to
have a "smart nightstand" that can move
independently in a home environment (apartment or
house). Our goal is that this assistant can navigate,
locate and track the user's system when needed. This
medical assistant may allow a relative or a doctor to
remotely monitor the physiologic data of the user
(thermometers, blood glucose meters, blood
pressure, pulse oximeters, etc.). It also helps when
an alert occurs to visually inspect the patient and if
necessary, communicate with him. This platform
should also allow the user to access a number of
multimedia features such as video conferencing,
play multimedia content (movies, music, etc..). The
technological system choices were made with the
idea that this platform must be accessible to the
greatest number of elderly people.
A first prototype has been developed which
embodies the concept discussed. We present here the
different technologies and techniques to meet the
expected functionality.
2.2 Zigbee for Localization
and Sensors Communication
2.2.1 Zigbee
The Zigbee technology, based on the 802.15.4
standard and it works on the same frequency band as
WiFi, 2.4GHz. This technology has the advantage of
having very low power consumption, one have also
the opportunity to significantly expand a mesh
network (65,000 end-devices). It therefore provides
parallel information from many sensors.
Additionally, this technology can be used in
domotic, allowing the platform to control compatible
equipment. Indeed, one of the advantages of ZigBee
is its interoperability. The ZigBee Alliance has
created this standard to create a consistent
communication between multiple devices. This
standard is actually a layer (ZigBee Pro Stack 2007)
which is placed on top of the 802.15.4 MAC layer
handles addresses. It allows to manage the network
(topology, security, communication, etc). The
Zigbee standard formats the messages sent between
the devices. Each device is classified into categories
and sub-category (Cluster) and is able according to
the categories on which it depends to send or receive
specific messages. All these categories are stored in
different standardized norms. For our part, we will
focus especially on the “Home Automation”
standard and the XBEE hardware that is constituted
of many analogic channels. The standard home
automation can control lights, heating, electrical
outlets, smoke detectors or can provide alarms. The
XBEE hardware is interesting to collect analogic
data from different sensors, in our case medical
sensors.
2.2.2 Zigbee for Localization
The localization of the platform in its environment is
achieved by Zigbee. For Zigbee network, XBee Pro
module was used as a system coordinator. Then,
effective way to equip an apartment with Zigbee,
would be to place an electrical outlet with Zigbee on
each power socket. This will allow it to have a large
mesh network covering the whole apartment and
allow it to achieve an effective localization. To
allow a Zigbee module to be wear by the user, the
Zigbee medical solution ZCare of CLEODE was
chosen. This sensor allows can monitor: pulse,
possible falls of the person, and includes a button to
call emergency. Here we can see the interest of
Zigbee with the interoperability of a system
developed by third parties. This solution allows to
locate the person and to perform medical monitoring
at the same time.
The localization of a ZigBee module for its part
can be determined based on the signal power (RSSI:
Receive Signal Strength Indication) sends to other
modules.
The signal strength varies with the distance
(Blumenthal, et al., 2007):
With: PTX = Transmission power of sender,
PRX = Remaining power of wave at receiver,
SmartMovingNightstand-ForMedicalAssistanceofElderlyPeopleanOpenProject
519

GTX = gain of transmitter,
GRX = Gain of receiver,
λ = wave length,
d = Distance betweens sender and receiver,
PREF = power reference (Typically 1mW)
RSSI in dBm.
The RSSI values range between -45 and -100 dBm
and therefore it is possible (for a signal on 100m) to
trace the evolution of the theoretical RSSI function
of distance (Sugano, 2006).
A number of researches have been done on the
indoor localization Zigbee (Lau, et al., 2009)
(Thomas & Ros, 2005). Based on triangulation
algorithms it seems conceivable given the location
of a Zigbee module in a room provided by Zigbee
module with an error margin of 2m.
In this project, the ZigBee can be used in order to
know in what room of the apartment is the user
through a zigbee bracelet, and know where the
platform is. It would be useful to determine how
accurately our platform could determine the position
of the user in the room with the RSSI signal to come
and watch, and whether this accuracy is maintained
in outdoor conditions.
2.2.3 Zigbee for Sensors Communication
Communication with XBee modules on our platform
is done by receiving messages with UART written in
hexadecimal. The X-CTU software is used to
configure the XBee card. There are two possible
modes, the transparent mode and API mode. The
API mode is more indicated for a network or
identification of multiple devices.
In this project we choose to apply the API mode
that will help for the computation of different
physiological signal by identifying which sensor
sends the data. Moreover another type of application
could be the localisation of a lost sensor which can
be an interesting issue with elderly people.
3 PRELIMINARY RESULTS
Some preliminary results were obtained with our
first prototype to show the potential of our approach.
In this section we show the potential of our method
that can either be a tool for localization and for
sending data.
3.1 Distance Estimation with RSSI
It is possible to estimate the distance between two
ZigBee modules with the help of the RSSI signal
(Received Signal Strength Indication). A relation
exist between the value of the RSSI and the distance.
In the first experiment, we decided to estimate this
relation with our specific hardware. We decide to
estimate the distance between the ZigBee module
and our robotic platform.
3.1.1 Static Determination of Distance
(Indoor)
As state in the introduction, RSSI signal is perturbed
by noise but the RSSI signal is more clear and
discriminant at short distance (<1.5m).
We realised the following measurement at
different distances: 5, 10, 20, 30, 40, 50, 70, 100,
130, 160, 200, 250 and 300 cm. These measures
were repeated 10 times at each position to obtain
statistically exploitable data. The mean value
obtained is represented at Figure 2. This study was
conducted in an office room which can be likened to
a domestic environment. It can be observed that the
RSSI curve is approximately bijective, meaning that
the distance can be evaluated. But there is an
exception at 160 cm that can be explained by
occlusion and reflection of the ZigBee wave due to
the objects included in the room.
Figure 2: Static recording of RSSI (indoor).
3.1.2 Dynamic Determination of Distance
(Outdoor)
In this section we tested with two repetitions the
RSSI value in indoor condition when the mobile
platform was moving to the target (i.e. Zigbee
module) to find whether the motion can lower the
accuracy of RSSI signal. We propose a new manner
to assess the quality of the obtained points by
computing the coefficient of determination (R²)
between these points and a logarithmic curve that
fits the points. If the points follow a bijective and
logarithmic function as expected ideally, the R² will
be close to 1. If the R² is further to 1 it means that
the quality is low and certainly the RSSI signal is
perturbed by occlusion, reflection or low intensity
signal. In this experiment the R² is equal to 0.92 (see
HEALTHINF2014-InternationalConferenceonHealthInformatics
520

Figure 3) that is compared to 0.96 in the static
condition.
Figure 3: Dynamic recording of RSSI (outdoor).
This result has to be compared to the RSSI data
obtained in indoor in dynamic condition. We
obtained a R² of 0.87 (see Figure 4). We can
observed that in this case the curve is much noisy
compared to outdoor condition and also compared to
static condition where 10 samples were recorded.
Figure 4: Dynamic recording of RSSI (indoor).
3.2 Send Data from a Sensor
The XBEE technology can be connected to a shield
that sends data to a UART port. We developed a
software that reads the data from this UART and
record it on our platform. As explained before the
user holds a sensor using the home automation
protocol. Moreover we send wirelessly the data of
temperature during a moment when the user grasps
the thermometer. This thermometer is a device that
we developed for the experiment (see Figure 5).
The temperature of the body where captured
(hand temperature) and sent remotely to the robot
(see Figure 6). One can notice the ambient
temperature around 24° C, the progressive increase
around 27°C, the temperature of the hand during the
grasping and a progressive return to the former value
of ambient temperature.
Figure 5: Communication between our robot and the user.
A: Zigbee Thermometer, B: ZCare device, C: User, D:
Zigbee Coordinator, E: Touch screen and F: Robot.
Figure 6: Temperature measurement with ZigBee
transmission.
4 DISCUSSION AND FUTURE
WORK
We propose an open platform allowing to access the
robot at low level. We demonstrated a first proof of
concept by sending remotely temperature data. We
also presented a method to assess the quality of the
RSSI signal. And we showed that outdoor dynamic
measurement is more reliable than indoor
measurement, probably due to occlusion and
reflection of the wave signal. The determination of
the distance between the robot and a wireless sensor
is essential because this can lead to the localization
of the user that wearing the sensor. Another
important issue is the localization of a lost sensor
which can be solved with the same method. Our
ongoing researches are focused on different type of
sensors. The development of specific algorithms
based on the different sensors is the challenge that
we want to promote with the help of the community
of developers and researchers involved in health
technology.
REFERENCES
Blumenthal, J., Grossmann, R., Golatowsk, F. &
Timmermann, D., 2007. Weighted Centroid
Localization in Zigbee-based Sensor Networks.. IEEE
international symposium on Intelligent Signal
SmartMovingNightstand-ForMedicalAssistanceofElderlyPeopleanOpenProject
521

Processing, p. 1–6..
Isais, R. et al., 2003. A Low-cost Microcontroller-based
Wireless ECG-blood Pressure Telemonitor for Home
Care. s.l., Proceedings of the 25th Annual
International Conference of Engineering in Medicine
and Biology Society (Vol. 4, pp. 3157-3160) .
Jayawardena, C. et al., 2012. Design, implementation and
field tests of a socially assistive robot for the elderly:
Healthbot version 2.. s.l., In Biomedical Robotics and
Biomechatronics (BioRob), 2012 4th IEEE RAS &
EMBS International Conference on (pp. 1837-1842)..
Jayawardena, C. et al., 2010. Deployment of a service
robot to help older people.. s.l., In Intelligent Robots
and Systems (IROS), 2010 IEEE/RSJ International
Conference on (pp.pp. 1837-1842)..
Lau, S.-Y.et al., 2009. A Measurement Study of Zigbee-
based Indoor Localization Systems Under RF
Interference.. New York, In Proceedings of the 4th
ACM International Workshop on Experimental
Evaluation and Character.
Mutlu, B. et al., 2005. Perceptions of ASIMO: An
Exploration on Co-operation and Competition with
Humans and Humanoid Robots.. New York, In
Proceedings of the 1st ACM SIGCHI/SIGART
conference on Human-robot interaction (pp. 351-352).
ACM..
Sakagami, Y. et al., 2002. The intelligent ASIMO: System
overview and integration.. s.l., IEEE/RSJ International
Conference on In Intelligent Robots and Systems (Vol.
3, pp. 2478-2483)..
Sugano, M. K. T. O. Y. &. M. M. ,. 5. 0., 2006. Indoor
localization system using RSSI measurement of
wireless sensor network based on ZigBee standard..
Target, Volume 538, p. 50.
Thomas, F. & Ros, L., 2005. Revisiting Trilateration for
Robot Localization.. IEEE Transactions on Robotics ,
21(1), pp. 93-101.
toto, 2013. zigbee page. (En ligne)
Available at: www.zigbee.org
Van de Ven, A. A., Sponselee, A. M. A. & Schouten, B.
A., 2010. Robo MD: a home care robot for monitoring
and detection of critical situations.. s.l., In
Proceedings of the 28th Annual European Conference
on Cognitive Ergonomics (pp. 375-376). ACM..
HEALTHINF2014-InternationalConferenceonHealthInformatics
522
