
Supporting Distant Human Collaboration under Tangible Environments
A Normative Multiagent Approach
Fabien Badeig
1,2
and Catherine Garbay
1
1
Laboratoire d’Informatique de Grenoble (LIG), AMA team, Universit
´
e Joseph Fourier / CNRS, Grenoble, France
2
Fayol Institute, ISCOD team, Ecole Nationale Sup
´
erieure des Mines de Saint-Etienne, Saint-Etienne, France
Keywords:
Human Collaboration, Tangible Interaction, Multiagent Design, Normative System, Trace-based System.
Abstract:
The purpose of this paper is to present a new approach to support distant human collaboration under tangible
environments. Our aim is not to build and transmit across the distant tables an accurate and complete de-
scription of the human activity. Rather, our choice is to restrict communication to the possibilities offered by
the tangible tables (tangible object moves and virtual feedback). In this context, we propose to focus on the
elicitation and sharing of the norms and conventions that frame human activity, a core issue to sustain proper
collaboration. We promote in this perspective the design of a normative multiagent system, whose goal is to
emulate the influence of these norms on distant cooperation, thus bringing mutual awareness to the human
partners. The role of such system is (i) to represent these potentially heterogeneous and evolving systems of
norms in a declarative and distributed way, (ii) to filter the interpretation and communication of human activity
according to these norms, and (iii) to build an informed virtual feedback providing information about the con-
formity of action with respect to the conventions. An application to the RISK game is presented to exemplify
the proposed approach.
1 INTRODUCTION
The purpose of this paper is to present a new approach
to support distant human collaboration under a tan-
gible environment called TangiSense (Lepreux et al.,
2011). The TangiSense table may be seen as a mag-
netic retina that can detect and locate tangible objects
equipped with RFID tags. Its spatial and temporal
resolution is compatible with real-time. The table sur-
face is further equipped with a liquid-crystal display
(LCD) allowing virtual display. Each table is con-
nected to a computer that manages tangible objects
tracking and virtual feedback. Virtual display through
the LCD surface may provide immersion in simulated
environments but also, and more importantly, assess
the effective detection of tangible object and provide
feedback about their positioning and moves for dis-
tant users. Assessing the conformity of moves with
respect to the rules governing the collaborative ac-
tivity is a further role that is core to the present pro-
posal. The system to be designed must support a col-
lective and constructive approach to problem solving,
as opposed to a competitive one. This implies the
development of mutually consistent decision-making
processes in which users share resources and knowl-
edge. However, our aim is not to build and transmit
across the distant tables an accurate and complete de-
scription of the human activity. Rather, our choice is
to restrict communication to the possibilities offered
by the tangible tables (tangible object moves and vir-
tual feedback). In order that collaboration fully ben-
efit from the specificities of tangible interaction, the
design should finally preserve the spontaneous, op-
portunistic character of human activity. In this con-
text, we propose to focus on the elicitation and shar-
ing of the norms and conventions that frame human
activity, a core issue to sustain proper collaboration.
We promote in this perspective the design of a nor-
mative multi-agent system, whose goal is to emu-
late the influence of these norms on distant cooper-
ation, thus bringing mutual awareness to the human
partners. The role of such system is (i) to represent
these potentially heterogeneous and evolving systems
of norms in a declarative and distributed way, (ii) to
filter the interpretation and communication of human
activity according to these norms, and (iii) to build
an informed virtual feedback providing information
about the conformity of action with respect to the con-
ventions. To exemplify the proposed approach, we
describe an application to the RISK game. The RISK
249
Badeig F. and Garbay C..
Supporting Distant Human Collaboration under Tangible Environments - A Normative Multiagent Approach.
DOI: 10.5220/0004916102490254
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 249-254
ISBN: 978-989-758-016-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: The TangiSense table equipped for the RISK
game with tangible objects and virtual images displaying
the ground map and tangible object moves.
game is a strategic board game where players fight to
win territories. Upon start, each player is given an
army (cannons, soldiers, cavalrymen) and a set of ter-
ritories from a political map of the Earth. Each player
attacks the other players in turn. To this end, he must
first of all designate two territories, one from its own,
supporting the attacking armies, and the other from
the board, that is attacked. The attacking and attacked
players then throw the dice to determine who loses
and who wins the round. A sample view of the game,
as played on the TangiSense table, is provided in Fig-
ure 1. This game leaves some autonomy to the play-
ers (which army to select, which territories to attack).
However, they have to remember and follow the rules
governing each move and proceed according to well-
defined gameplay (in this case, a turn-taking proto-
col). Support for the follow-up of these rules will be
provided by the collaborative support system that we
describe in the following sections.
2 STATE OF THE ART
2.1 Collaborative Support Systems
One major challenge when designing collaborative
support systems is to preserve the spontaneity and flu-
idity of human activity while ensuring the consistency
and proper coordination of action (Pape and Graham,
2010). Informal and opportunistic working styles
should indeed be promoted (Gutwin et al., 2008); at
the same time, the role of the system is to support
the building of a common vision or so-called ”mutual
awareness” (Kraut et al., 2003). Physical co-presence
provides multiple resources for awareness and con-
versational grounding. This has to be complemented
in the case of distant communication. Tangible inter-
action occupies a specific niche in this respect, since
tangible objects may be seen as full resources to sit-
uate action (Shaer and Hornecker, 2010). Commu-
nication is then grounded in the objects of the work-
ing space, and some of them may be designed to sup-
port action coordination and elicitation. Visual infor-
mation then becomes a conversational resource that
allows maintaining mutual awareness (Kraut et al.,
2003). Beyond conversation, perceiving the other’s
activity may be approached from the viewpoint of
the other’s social embodiment, that is considering
the constraints and rules that shape individual activ-
ity (Erickson and Kellogg, 2003). These issues were
discussed in a previous paper (Garbay et al., 2012)
into some more depth. We proposed in particular the
introduction of tangigets, tangible objects aimed at
supporting distant coordination, and ”norms”, declar-
ative rules aimed at representing social laws and con-
ventions, and governing the processing of tangible
objects moves. Managing human activities in dis-
tributed environments requires the adoption of com-
plex, emergent and adaptive system design, where
flexibility, re-configurability and responsiveness play
crucial roles (Millot and Mandiau, 1995). Various
architecture models have been proposed in this re-
spect. As quoted by (Kolski et al., 2009), these
models have been largely inspired by interactive sys-
tems architectures. Among these, CoPAC, PAC* or
CLOVER (Laurillau and Nigay, 2002) propose a dis-
tinction between production, communication and co-
ordination spaces. Such distinction is of interest to
our work, since there is a need to (i) ensure the follow-
up of distant objects, ((ii) ensure the follow-up of the
state of collaboration and (iii) provide feedback about
these moves.
2.2 Normative Multiagent Systems
The goal in normative multiagent systems is to model
cooperation and coordination under a social per-
spective. In such systems, norms drive agents to-
ward ”proper and acceptable behavior” and define
”a principle of right action binding upon the mem-
bers of a group” (Boella et al., 2007). These norms
are usually represented as production rules of the
form: ”whenever ⟨context⟩ if ⟨state⟩ then ⟨agent⟩
is ⟨deontic operator⟩ to do ⟨action⟩” (Boella et al.,
2007). Specific to this style of programming is the
fact that agents autonomously commit to obey the
norms, in a way specified by the deontic operator.
Any agent may however decide not to follow some
norm: this may result in penalties. The implemen-
tation of normative agent architectures is very of-
ten based on the belief, desire, and intention (BDI)
paradigm, with norms seen as external incentives for
action (Dignum et al., 2002). Norms are triggered by
a dedicated engine and result in agent notifications.
Another specificity of this modeling is the fact that
norms may evolve along the course of action. This
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
250

may appear necessary in large, open organizations,
where sub-groups often exhibit different and some-
times conflicting sets of norms. Agents in such or-
ganizations may need to join and leave the system
freely, or to move from one group to another: mech-
anisms must be provided so that they may recognize
and acquire local sets of norms (Hollander and Wu,
2011). (Boella et al., 2007) distinguishes between two
complementary dynamics: the one of the social rules,
and the one the environment or physical laws, which
may evolve in response to changing circumstances.
Such design has already been promoted in the field
of CSCW. (Rong and Liu, 2006) proposes a distinc-
tion between Local agents (individual partners), Su-
per agents (monitoring local agent actions and pro-
viding feedback so that local norms may evolve), In-
teractive agents (creating connections between agents
based on their abilities) and Cooperation agents (mon-
itoring agent organizations). This work is based on
the EDA agent’s model (Filipe, 2000) in which sev-
eral types of norms with different semiotic levels are
distinguished (perceptual, cognitive, behavioral and
evaluative). We proposed in a previous paper (Badeig
et al., 2012) an approach centered on the notion of
norm awareness, with situated agents sharing a com-
mon multidimensional trace reflecting conformity to
the norm.
3 PROPOSITION
3.1 Proposed View
Our approach to distant collaboration support is cen-
tered on the notion of norm awareness: core to hu-
man collaborative work is the fact that people may
not share the rules and conventions their frame their
activity, be it because they belong to different orga-
nization, or because they behave as individual peo-
ple, and shows for example a tendency to prioritize
some rules over others. We promote a multi-agent de-
sign, to cope with the distributed nature of the tangi-
ble surfaces, with the potential complexity of the task
to be handled and with the potential heterogeneity of
the human organizations in front. We further model
collaboration as a process coupling production, com-
munication and coordination spaces, according to the
CLOVER approach for groupware design (Laurillau
and Nigay, 2002). As illustrated in Figure 2, each
space is populated with agents and norms of different
types: events from the tangible surface are processed
within the production space, virtual feedback are op-
erated from the communication space and norms are
evolved within the coordination space. The agents
Figure 2: Functional view showing the various types of
agents, filters and traces.
are situated within a multidimensional trace reflect-
ing the evolution of human activity and its confor-
mity to the norms under consideration. In a dual per-
spective, human activity is situated in the space of the
tangible surface. Virtual feedback is provided to re-
flect distant activity as well as compliance of a tangi-
ble object move to the norm. This feedback may be
considered as incentive for the co-evolution and im-
proved coordination of actions among collaborating
partners. The role of the norms, defined as condition-
action rules, is to regulate the system’s activity in each
of the production, communication and coordination
spaces, by checking the conformance of the activity
and shaping agent processing in a context sensitive
way. Coordination agents are provided with the abili-
ties to update the set of norms, to account for contex-
tual specificities (major collaboration steps or critical
events detection, for example). Human and artificial
agents are responsible for the activity dynamics while
norms are responsible for the regulation of this dy-
namics. Traces evolve jointly under the asynchronous
and concurrent action of human and artificial agents.
3.2 Formal Definition of the System
Components
The system architecture involves four working
spaces, namely the environment, the traces space
t
, the
agents space
a
and the norms space
n
.
system = ⟨environment, space
t
, space
a
, space
n
⟩ (1)
environment = {tang
i
, virt
j
|∀i, j } (2)
The environment is a physical space, made of tangible
and virtual objects. It is open to human actors, accord-
ing to certain constraints and rights. The management
SupportingDistantHumanCollaborationunderTangibleEnvironments-ANormativeMultiagentApproach
251

by the system of these objects gives rise to numeri-
cal traces, which constitute a numerical space. This
space is open to artificial actors (the agents), accord-
ing to other constraints and rights. These constraints
and rights depends on the organizational specification
of the system where each agent plays different roles,
depending on its types (typically update the current
normative policy for coordination agents) and belong
to different groups (we typically consider that agents
working on a table constitute a group). The state of
the environment, at a given time, is specified by a sub-
set of the space of traces. Core to our design is the
management of the rights and constraints over physi-
cal and numerical information processing. To account
for this specificity of our approach, we model a trace
as a tuple of
(
property
,
value
)
pairs with properties
typed to register their compliance and handiness:
space
t
=
{
trace
i
|∀i
}
(3)
trace = {(p, v)} where
p = ⟨name : compliance ∈ {valid, invalid}
: handiness ∈ {(type, group, role)}⟩
(4)
The compliance of a property may be typed as valid
(or invalid) to express the fact that the given prop-
erty is compliant (or not) with respect to the norms
at hand. Various access rights may in addition be
specified through the field handiness. The tuple
(type, group, role) for this field restricts the access
of property p to agents of given type (production,
communication or coordination), group and role in
the system. Newly created traces are defined as
not compliant with access restricted to local group
((Null, < idTable >, Null)). We distinguish between
three types of agents: production, communication
and coordination. Communication agents ensure the
communication between human and artificial actors
that constitute the socio-technical system at hand:
they ensure the follow-up of incoming events from
the tangible surface and update the numerical trace
accordingly; conversely, they exploit the numerical
trace properties, depending on their compliance and
handiness values, to build some virtual feedback for
human actors. The role of production agents is to
build an understanding of the moves at hand, account-
ing for the various constraints surrounding human and
agent activity, and to enrich the trace properties ac-
cordingly. The coordination agents ensure the man-
agement of the norms under which human and arti-
ficial agents activity has to take place. Their role is
more precisely to update the system of norms, to ac-
count for potential evolution of the state of activity
and stage of collaboration. The agent space is ex-
pressed as follows:
space
a
= {prod
ag
i
, comm
ag
j
, coor
ag
k
|∀i, j , k } (5)
Ag = ⟨id, (group, role)
+
, behaviors, norms⟩ (6)
with id a unique identifier, role the role of the agent
in a specific group in the system, behaviors a list of
concurrent agent abilities, norms the set of norms that
the agent has to follow. Agents subscribe to norms,
depending on their group, role, type, abilities and cur-
rent context. We distinguish between three kinds of
norms. Communication norms are dedicated to the
formalization of human-to-human, human-to agent
and agent-to-agent access rights. Production norms
are dedicated to the formalization of domain- and
task-dependent constraints. Coordination norms are
dedicated to the formalization of the overall evolution
of task requirements. The role of these norms is to
launch the agents in a situated way, with respect to
these constraints. The space of norms is expressed as
follows:
space
n
= {prod
N
i
, comm
N
j
, coor
N
k
|∀i, j, k} (7)
N = ⟨id, context, group, role, ob ject⟩ (8)
in which context represents an overall evaluation
condition (current processing or activity stage, cur-
rent system state or actors’ situation), role rep-
resents the agent’s role concerned by this norm
and ob ject is a complex field, typically written as
launch(conditions , actions) characterizing the condi-
tional action attached to the norm (launching of agent
behavior).
4 RISK APPLICATION
The purpose of this short example is to exemplify the
expressiveness of the proposed approach and illus-
trates some of its coordination mechanisms. The sys-
tem operates according to the following information
flow: (1) Early detection of a tangible object move by
communication norms operating at the infrastructure
level: creation or update of the corresponding local
trace, (2) Triggering of the coordination norms: up-
date of the current set of norms (when necessary), (3)
Triggering of the production norms: computation of
further trace properties, (4) Triggering of the commu-
nication norms: providing feedback to local and dis-
tant human actors. When the game starts, a default
norm policy is activated to handle the process asso-
ciated with game initialization. The attacking state
is reached as soon as the corresponding coordination
tangiget is placed on a table. A designation tangiget
may then be handled. A new norm policy must be
applied to deal with this current state. A coordina-
tion norm, called Norm
attack
, detects this context and
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
252
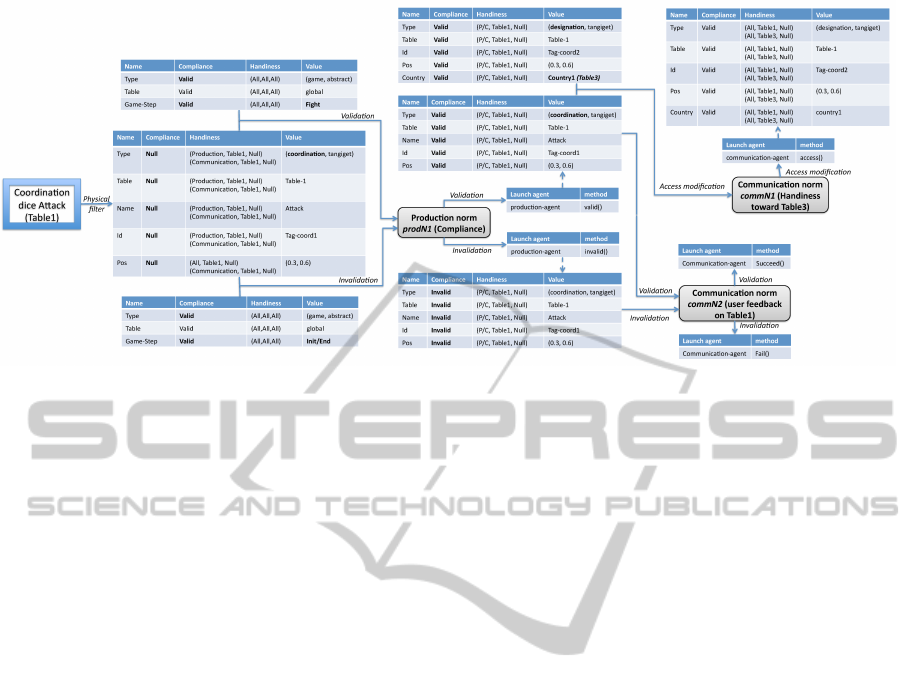
Figure 3: Compliance and Handiness process in a specific phase of the RISK game.
launches a coordination agent (role synchro) to update
the norm policy for the attacking and attacked players:
Norm
attack
=< id, [step = f ight], synchro,
launch(cond, manage
normpolicy
) > with
(9)
cond = [trace.type(?t1) = coordination]
∧ [trace.table(?t1) =?tab1]
∧ [trace.name(?t1) = attack]
∧ [trace.type(?t2) = designation]
∧ [trace.table(?t2) =?tab1]
∧ [trace.country(?t2) =?c]
(10)
At the end of an attack, each player rolls a dice to
determine the winner and looser for this phase. A
production norm, called Norm
dice result
, ensures the
follow-up of the dice roll results, the determination
of the winner and loser and the launching of an agent
(role dice
result
), whose role will be to update the traces
accordingly:
Norm
dice result
=< id, [step = f ight],
dice
result
, launch(cond, win) > with
(11)
cond = [trace.type(?t1) = dice]
∧ [trace.value(?t1) =?v1]
∧ [trace.table(?t1) =?x]
∧ [trace.type(?t2) = dice]
∧ [trace.value(?t2) =?v2]
∧ [trace.table(?t2) ̸=?x] ∧[?v1 >?v2]
(12)
Figures 3 and 4 further depict the evolution of the
trace depending on the mutual action of the agents
and norms, for the attacking phase. Handling the
coordination tangigets on Table 1, and then designat-
ing an attacked territory belonging to Table3 modify
the trace, thus triggering the successive management
of its compliance and handiness properties, thanks
to the production and communication norms prodN1
and commN1. This updating triggers a communica-
tion norm commN2, resulting in a virtual feedback to
the local user operating on Table1. A new stage of
the game must now be entered (fighting stage), which
means that some norms have to be updated, for the
attacking and attacked players on both Table1 and
Table3. This process is divided in two steps, as il-
lustrated by Figure 4. The first one is the modifica-
tion of the global trace of the game (reachable by all
agents) by a coordination agent working at the global
group level. This coordination agent specifies the new
norm policy in the field policy of the global trace.
This agent is launched by the coordination norm
coordGlobal. The second step is the norm modifi-
cation for the attacked and attacking players, respec-
tively on Table1 and Table 3. This is performed by
coordination norm coordT 1 (resp. coordT 3) whose
role is to launch a coordination agent on the attacking
and attacked tables (Table1 and Table3) to update the
local norm policy as specified in the field policy of the
global game trace.
5 CONCLUSIONS
In this paper, we presented a new architecture based
on normative multiagent systems to support collabo-
rative work over distant tangible surfaces. The pur-
pose of our design, illustrated on a simple scenario
from the RISK game, is to support the representa-
tion and sharing of the systems of norms that frame
human collaboration. We have proposed to this end
an architecture inspired from the CLOVER approach
to groupware design, and involving production, com-
SupportingDistantHumanCollaborationunderTangibleEnvironments-ANormativeMultiagentApproach
253

Figure 4: Norm dynamic in a specific phase of the RISK game.
munication and coordination agents. These agents
are designed as sharing a common multidimensional
trace reflecting human as well as artificial actors’ ac-
tivity. Their role, under control of dedicated norms,
is to ensure the compliance, handiness and proper co-
ordination of activity. These properties are reflected
(i) in the numerical trace and (ii) over the physical
surface by means of virtual display, to ensure mu-
tual awareness between the human and artificial ac-
tors’ worlds. Further work would involve considering
more complex scenarios, i.e. more complex activities
and human organizations styles.
ACKNOWLEDGEMENTS
This work was done while F. Badeig was member of
the LIG/AMA team and was supported by Agence
Nationale de la Recherche under grant IMAGIT
(ANR-10-CORD-0017).
REFERENCES
Badeig, F., Garbay, C., Valls, V., and Caelen, J. (2012).
Normative approach for socio-physical computing -
an application to distributed tangible interaction. In
ICAART, pages 309–312.
Boella, G., van der Torre, L. V. N., and Verhagen, H. (2007).
Introduction to normative multiagent systems. In Nor-
mative Multi-agent Systems.
Dignum, V., J.-J.Meyer, and Weigand, H. (2002). Towards
an organizational model for agent societies using con-
tracts. In AAMAS, pages 694–695.
Erickson, T. and Kellogg, W. (2003). Social translucence:
Using minimalist visualizations of social activity to
support collective interaction. In H
¨
o
¨
ok, K., Benyon,
D., and Munroe, A., editors, Designing Information
Spaces: The Social Navigation Approach, pages 17–
41.
Filipe, J. (2000). An organizational semiotics model for
multi-agent systems design (short paper). In EKAW,
pages 449–456.
Garbay, C., Badeig, F., and Caelen, J. (2012). Normative
multi-agent approach to support collaborative work in
distributed tangible environments. In CSCW (Com-
panion), pages 83–86.
Gutwin, C., Greenberg, S., Blum, R., Dyck, J., K.Tee, and
McEwan, G. (2008). Supporting informal collabora-
tion in shared-workspace groupware. Journal of Uni-
versal Computer Science, 14(9):1411–1434.
Hollander, C. D. and Wu, A. S. (2011). The current state of
normative agent-based systems. Journal of Artificial
Societies and Social Simulation, 14(2):6.
Kolski, C., Forbrig, P., David, B., Girard, P., Tran, C. D.,
and Ezzedine, H. (2009). Agent-based architecture for
interactive system design: Current approaches, per-
spectives and evaluation. In HCI, pages 624–633.
Kraut, R. E., Fussell, R., and Siegel, J. (2003). Visual infor-
mation as a conversational resource in collaborative
physical tasks. In HCI, pages 13–49.
Laurillau, Y. and Nigay, L. (2002). Clover architecture for
groupware. In CSCW, pages 236–245.
Lepreux, S., Kubicki, S., Kolski, C., and Caelen, J. (2011).
Distributed interactive surfaces using tangible and vir-
tual objects. In Workshop Distributed User Interfaces,
pages 65–68.
Millot, P. and Mandiau, R. (1995). Man-machine coop-
erative organizations: formal and pragmatic imple-
mentation methods. In Hoc, J.-M., Cacciabue, P. C.,
and Hollnagel, E., editors, Expertise and technology,
pages 213–228. L. Erlbaum Associates Inc.
Pape, J. and Graham, T. (2010). Coordination policies for
tabletop gaming. In Graphics Interface, pages 24–25.
Rong, W. and Liu, K. (2006). A multi-agent architecture for
cscw systems: from organizational semiotics perspec-
tive. In PRIMA, pages 766–772.
Shaer, O. and Hornecker, E. (2010). Tangible user inter-
faces: Past, present and future directions. In HCI,
pages 1–138.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
254
