
An Agent-oriented Ground Vehicle's Automation using Jason
Framework
Reydson Schuenck Barros, Victor Hugo Heringer, Carlos Eduardo Pantoja,
Nilson Mori Lazarin and Leonardo Machado de Moraes
CEFET/RJ, Gov. Roberto da Silveira 1900, Nova Friburgo, 28635-000, RJ, Brazil
Ke
ywords: Unmanned Vehicles, Multi-agent Systems, Robotics.
Abstract: This paper proposes an agent-oriented ground vehicle automation that uses low-cost hardware. The vehicle's
platform consists in a group of hardware and software layers that acts with the Jason programming language
for unmanned vehicles automation. This paper also presents a methodology with four programming layers
to facilitate the hardware integration and implementation. To validate and demonstrate the platform an
unmanned ground vehicle was constructed using an ATMEGA328 microcontroller, a library for serial
communication and a six-function remote controlled vehicle. The vehicle is able to move from one point to
another based on its global position.
1 INTRODUCTION
An intelligent agent can also be as physical as virtual
and has the capability of acting upon a simulated or
a real environment. Besides, it has individual goals
and can communicate with others agents in order to
satisfy its goals (Ferber, 1998).
Recently, a new applicability of Multi-Agent
Systems (MAS) is the development of autonomous
unmanned vehicles systems. These vehicles do not
need embedded pilots and, in many cases, are guided
by a portable or mobile control station. In this
process, a group of problems can be identified like
human failure and communication that interferes the
vehicle’s mission.
There are several frameworks that use the agent-
oriented approach and looks for the Unmanned
Aerial Vehicles (UAV) automation, like (Wallis et
al., 2002), that uses JACK intelligent agents
(Busetta, 1999) to provide a simple programming
environment of flying tactical behaviors; and (Huff
et al., 2003), that developed a simulator capable of
representing an UAV agent with different flying
planning approaches. However these works do not
present hardware connections, acting only with
simulations.
There are some platforms that embed MAS into a
specific hardware, e.g. (Karim; Heinze, 2005),
which provides an agent architecture programmed in
JACK for the Codarra Avatar. However, the
platform do not allow other UAV integration and the
vehicle needs to be manned until reach a safe
altitude. In (Hama et al.,2011), the UAVAS platform
uses the Jason (Bordini et al., 2007) framework that
is a set of hardware and software used for the
Microcopter quadricopter automation. Despite the
idea of a generic architecture and the possibility of
others firmware integration, this platform is specific
for aerial vehicles.
So, the objective of this paper is to propose an
agent-oriented ground vehicle that uses a set of low-
cost hardware and software layers supported by the
Jason framework. Besides, the vehicle's platform can
be used with any vehicle (aquatic, aerial and
ground). To exemplify the vehicle's operation will be
used: an ATMEGA328 microcontroller; the RXTX
library for serial communication, and a six-function
remote controlled vehicle.
This paper is structured as follows: in Section 2
will be presented the Jason framework basic
concepts; in Section 3 will present the physical
structure of the platform and will also present a
programming methodology used in the vehicle's
automation; in Section 4, a functional example will
be developed with the proposed vehicle's platform;
in Section 5 some related work will be analyzed; and
finally, in Section 6 a conclusion and the related
works will be presented.
261
Schuenck Barros R., Hugo Heringer V., Eduardo Pantoja C., Mori Lazarin N. and Machado de Moraes L..
An Agent-oriented Ground Vehicle’s Automation using Jason Framework.
DOI: 10.5220/0004917102610266
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 261-266
ISBN: 978-989-758-016-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
2 JASON BASIC CONCEPTS
In this section will be presented some Jason
framework concepts that will be used in the platform
layers. The Jason agent-oriented framework is based
on the AgentSpeak and Java languages for MAS
development that uses the behavioral model Belief-
Desire-Intention (BDI) (Bratman, 1987). In Jason an
agent can be implemented using beliefs, goals, plans
and actions. An agent can acquire beliefs perceiving
the environment and communicating with others
agents. The goals are mental states that agents desire
to achieve in order to modify their environment.
These goals are activated based on the beliefs
perceived about the environment (Wooldridge, 2000)
and can be represented by plans in Jason.
A plan is composed of three different parts: (i)
the trigger event; (ii) the context; and (iii) the body
of a plan. The trigger event is responsible for the
plan activation, while the context is used to define
the applicability of a plan, satisfying to a certain
condition. The body of a plan is a set of actions that
an agent has to execute to achieve a goal.
In Jason an action is executed when a plan is
activated and can be of two types: (i) the actions that
change the environment and are executed outside the
agent through Java methods (these methods are
implemented to represent the effective action in the
environment); (ii) the internal actions that can be
pre-defined functions or communication function
created to support the agent reasoning (Bordini et
al., 2007).
3 THE VEHICLE'S PLATFORM
This section presents the vehicle's platform that was
projected as a sequence of hardware and software
layers that can be embedded in order to provide
vehicle’s computational intelligence and autonomy.
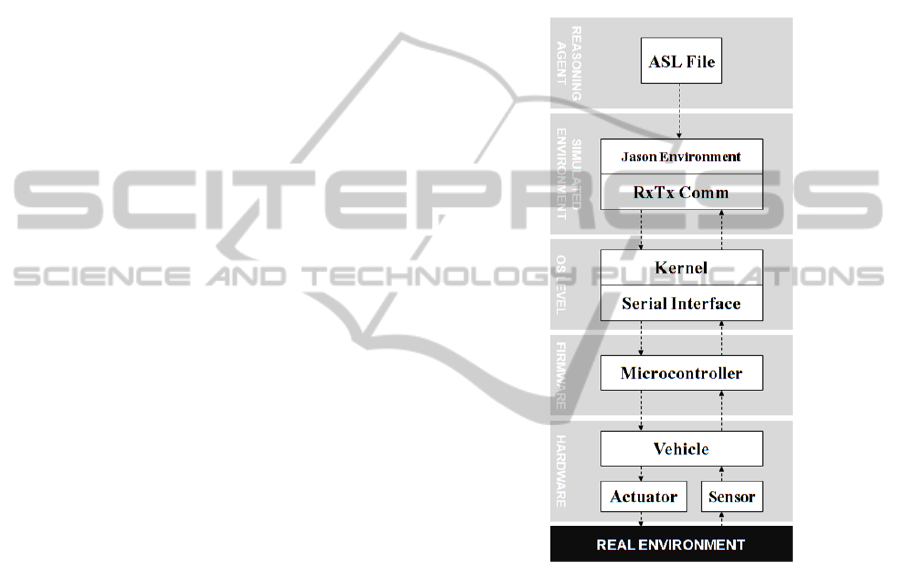
The platform is composed of five layers: the
Hardware; the Firmware; the Operational System
(OS); the Simulated Environment; and the Reasoning
Agents. The platform architecture can be seen in
figure 1.
The first layer, the hardware, contains (i) the
vehicle that needs to be automated; (ii) the actuators
that convert the electrical signals into actions in the
real environment; (iii) the sensors that intercept the
environment’s information and convert them into
electrical signals for the microcontroller layer. In
this layer it is chosen the vehicle type which will be
automated, as the sensors and the actuators that will
be used.
In the second layer, the Firmware, the sensors are
controlled by a microcontroller which converts the
electrical signals into data that can be transmitted by
a serial communication. This layer generates
electrical signals to the actuators, localized at the
vehicle, based on the data received by the serial
communication. In this layer, the sensors are
coupled at the microcontroller board, which in turn it
is coupled at the vehicle’s hardware with the
actuators.
Figure 1: The vehicle's platform.
The third layer, the Operational System, is the
serial interface, which through the Kernel, buffers
the data that arrives at the serial port or send the
available data to the agent's environment when
solicited. In this layer is chosen the OS that is
responsible to keep the next layers operation.
The fourth layer, the Simulated Environment,
contains the agent’s environment which receives its
actions commands. The environment is composed of
the modified RxTx Library working along with the
Jason Environment Class. The RxTx Library is
responsible for the connection between Java
language and the Kernel serial interface and allows
the both side data transmission through the serial
port. It still receives the external actions that need to
be executed by the device into the real environment.
The last layer, the Reasoning Agent, is
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
262

responsible for all the platform cognitive reasoning
and is programmed in Jason, which through plans,
goals, beliefs and actions is capable of controlling,
in real-time, the vehicle. The Jason framework uses
the BDI paradigm that adds behaviors aspects of
human-being reasoning.
The platform permits any hardware automation
that can use a microcontroller and this work focuses
on autonomous vehicles. The platform allows the
low-cost hardware integration and uses a set of free
software that is platform-independent, making the
solution accessible for many objectives.
3.1 The Platform Methodology
To use and implement the vehicle's platform is
necessary to follow a specific development
methodology in order to integrate correctly the
several hardware-software layers. There were
identified four programming layers that need
developers’ intervention: the Hardware; the
firmware; the Simulated Environment; and the Agent
Reasoning. The layers hierarchy can be seen in
figure 2.
Initially, a list of all agents’ environment
perceptions is necessary, as all actions that need to
be executed by the agents. From the list, the
necessary sensors and actuators are chosen, and they
have to be compatible with the microcontroller. In
the Hardware layer, the necessary voltage and
amperage for the motors activation must be analyzed
(if the microcontroller does not supply those needs
directly). In case of the power supply needs to be in
different polarities, it will be necessary adequate H
bridges and power transistors.
Figure 2: The four-step methodology.
In the Firmware layer, the microcontroller must
be programmed to receive serial communication
data and to send commands to the actuators from
these received data. The sensors data need to be
interpreted and to be sent to serial communication
too. Besides the sensors and actuators data, the
physical communication between agents must be
programmed in this layer. After the firmware
codification, it is necessary the code compilation and
upload it to the microcontroller.
In the Simulated Environment layer, the
environment is programmed in Java language where
it is necessary to: (i) program the interface serial
integration with the agent’s environment using the
RxTx Library; (ii) update the agent’s belief base
from the microcontroller data; and (iii) send the
agent’s external action to be executed by the
microcontroller. The methods responsible for the
logical communication between different vehicles
must be programmed in this layer.
Finally, in the Reasoning Agent layer, the agents
are programmed using Jason framework, where the
plans collection (with their respective actions) that
an agent can execute based on its beliefs, desires and
intentions are inserted.
The methodology presented allows the use of
several independent abstraction levels by the
developer. It starts with the hardware choice and
analyze until the vehicle’s cognitive programming.
The layers are integrated from a series of
communication and data flow methods. Thus, it is
possible to reutilize existents architectures,
microcontrollers and libraries for unmanned vehicles
automation or begin a new prototype, if it is
desirable.
4 THE VEHICLE PROTOTYPE
EXAMPLE
This section presents a simple working example
using the vehicle's platform. The example consists of
a ground vehicle that moves from one point to
another based on its global position. The initial point
is obtained by the GPS device installed in the
vehicle, while the end point is informed manually.
For demonstration it will not be considered any
obstacles between the initial and the end point. The
example uses the ATMEGA328 microcontroller; the
RxTxComm library for the serial communication that
is free; a Pentium IV computer; and the Jason
framework. The platform is embedded into a six-
function remote controlled vehicle. The vehicle can
be seen in figure 3.
The first level of the methodology is to analyze
the chosen hardware. The electrical signals that
activate the vehicle’s motors were analyzed and the
GPS device was chosen too. Besides, a group of
hardware components were used to facilitate the
vehicle's automation.
AnAgent-orientedGroundVehicle'sAutomationusingJasonFramework
263

Afterwards, the microcontroller must be
programmed with functions that activate the motors
forward, backward, left and right. It is necessary to
program the functions that will receive the serial
communication data from the virtual agent
environment.
Figure 3: The
vehicle prototype.
The function that gets the position from the GPS
and sends to the virtual agent environment still
needs to be programmed. The function sendGPS
gets the data from the GPS device and send it to the
serial port was implemented.
The loop function, responsible for the
microcontroller cycle, calls the sendGPS whenever
the GPS data is requested; the guide function to
control the vehicle; and reads the buffer information.
The next step of the methodology is to program
the virtual agent environment in Java integrated with
the RxTxComm library that is the bond between Java
language and the microcontroller. The Jason
environment is responsible for the methods that
represent the agent's actions and the serial
communication methods.
In the simulated environment was developed a
class library that is responsible to guide the vehicle
using the earth's pole as point of reference. So, the
reasoning agent will be able to analyze its own
movements based on the processing of the GPS data.
The class library allows a route analysis based on
two global position points and provides data
indicating if the vehicles deviates from its original
path.
To develop the library class was considered the
route as the least distance between two points into a
sphere. Considering the Earth's rounded format and
a planet's pole as reference, every route deviation
forms a spherical triangle that can be analyzed. A
spherical triangle can be seen in figure 4.
After some geometric analysis with spherical
triangle's properties and the law of sines and cosines
Figure 4: The spherical triangle.
a equation for calculate the distance between two
points into a sphere with the Earth's radius was used
(Milone; Wilson, 2008). The equation can be seen
below:
cos
(1)
With the distance's equation defined it was
possible to find an equation to correct the trajectory
of a body. In this case, if the vehicles goes out of its
trajectory, the equation returns the deviation's angle
from its original points. Afterwards, the agent will
be able to perform a correction movement based on
the deviation's angle. The angle's equation can be
seen below:
(2)
Others equations were developed to support the
movement definition: i) an equation to correct the
quadrant angle value because the angle's equation
returns always the lower possible value; and ii) a
stop equation in meters that defines a stopping area
based on the GPS latitude and longitude of the
destination point.
The last step of the methodology is to program
the virtual agent using the Jason framework. The
agent reasoning is programmed based on beliefs,
plans, intentions and actions. The agent changes its
beliefs from the perceptions of the simulated
environment. The agent request the real world
perceptions by performing an action called
getPosition. The GPS data will be transferred from
serial port to the simulated environment and after the
movement library process the received data, the
results will be transferred to the agent mind as
perceptions.
The actions goAhead, goBack, goLeft and
goRight will send a char from serial port to the
microcontroller and will activate the motors to
perform the selected movement. The stop action will
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
264

stop the vehicle sending a char that will deactivate
all motors. For last, the align action will align the
vehicle deactivating the left and right motors. The
agent codification is shown below:
!start.
+!start : true <-
+running;
!getPosition;
!move.
+!getPosition : running <-
getPosition.
+!move : running <-
goAhead;
!getPosition;
!move.
+!move : running & arrived <-
-running;
stop.
The agent reasoning is basically composed of
plans and actions. The plan start begins the
reasoning adding a running belief at agent’s belief
base and calls the getPosition plan to obtain the
current position from the GPS device. Afterwards
the move plan is called and will be executed only if
exists the running belief.
The getPosition plan performs the getPosition
external action while the running belief is in the
agent’s belief base to update the vehicle's current
position until it reaches the destination point. The
move plan will have two different behaviors
depending on the trigger event: (i) if the vehicle is
running and position was not reached yet; and (ii) if
the vehicle is already running and the pre-defined
position was reached (represented by the arrived
belief). In the last case, the running belief is
removed from the agent’s belief base, stopping the
movement. The arrived belief will be added by the
movement library when the vehicle reaches the pre-
defined stopping area.
It was realized an experiment with the vehicle
prototype between two points within a distance of
ten meters. The vehicle could move forward to the
destination point correctly and stopped inside the
pre-defined stopping area of 1 meter. Besides, this
simple example proves that the platform can
automate any vehicle because the movement library
was developed to support all kind of vehicles. The
automation can be performed using just low-cost
hardware and free software as can be seen above.
The vehicle could perform all programmed
movements using a Jason agent that was responsible
for all the reasoning based on its real world beliefs.
5 RELATED WORK
There are some works that propose platforms for
unmanned vehicles using agent-oriented
programming languages, frameworks and
methodologies. In (Wallis et al., 2002) a simulation
platform is proposed for unmanned aerial vehicles.
The platform uses the JACK intelligent agents but it
did not present hardware integration, working only
with simulations. In (Huff et al., 2003), a simulation
environment for different flight approaches is
proposed, but it not integrates any hardware in
simulations.
In (Karim; Heinze, 2005), an architecture for
JACK agents uses the UAV Codarra Avatar. But the
platform does not permit other hardware selection,
binding the platform with the selected vehicle. The
vehicle still needs to be manually piloted until
reaches a safe altitude and then the agent controls
entirely the vehicle.
The UAVAS platform proposed by (Hama et al.,
2011) is an agent-oriented platform that uses the
Jason framework to automate a UAV. The platform
uses specific microcontrollers for aerial vehicles and
it is generic for open-source microcontrollers.
However the platform only permits integration with
aerial vehicles.
The platform provides sixteen new Jason’s
internal actions to control the vehicle, including four
internal actions to communication. The actions are
responsible for the actuators/sensors controlling. But
some of those actions are specific for aerial vehicles.
The RxTxComm library is used to send/receive
information from the real environment to the agent.
In this paper, the vehicle's platform allows the
programmer to implements his/her own agent’s
behaviours based on the analysis of the electrical
signals of the chosen vehicle. The implementation
can be done for any kind of vehicles. Besides, it is
possible to use any microcontroller, together with an
OS, to control the vehicles.
The vehicle's platform is more flexible about all
the layers integration. However it is not the simplest
way of hardware automation, requiring some
electrical skills from the programmer.
6 CONCLUSIONS
This paper presented an agent-oriented ground
AnAgent-orientedGroundVehicle'sAutomationusingJasonFramework
265

vehicle that uses an unmanned vehicle platform that
integrates a series of layers from the hardware
connections layer until the agent reasoning layer
programmed using the Jason framework. The
platform consists of five layers that have to be
programmed in a four-step methodology.
The paper also presented an example of a simple
vehicle automation. The vehicle was embedded with
an ATMEGA328 microcontroller where the motor’s
functions were programmed too. Afterwards, the
serial interface methods were programmed along
with the agent’s action methods in order to represent
the modifications that an agent can perform in the
real world. Finally, the agent reasoning is
programmed using the Jason framework, an agent-
orient framework that uses the BDI approach.
The platform allows the automation of all types
of vehicles and can work with all kind of hardware.
The major objective of the platform is to provide a
simple agent-oriented methodology that can be used
for unmanned vehicles for any programmer.
The layers are composed of extent technologies
that are widely used by programmers. In fact, there
are no difficulties to handle those codifications
steps. The methodology forces the programmer
intervention in all development phases, providing a
certain degree of freedom in the components
selection. However, the platform demands much
more development time and movements expertise
compared with the other platforms.
For future works, a set of Jason’s internal actions
using latitude and longitude to provide global
movements, based on the GPS values, will be
developed instead of the global movements class
developed to be executed in the simulated
environment. It will allow the reasoning agent to
control all the cognitive reasoning about global
movements. The reasoning agent will not have to
wait the end of the simulated environment
processing cycle because the global position
functions will be internally processed into agent's
mind.
It will be necessary corrections in the
movement's equation for long distances because of
the Earth's eccentricity. The magnetic field can also
interferes if the vehicles were embedded with a
electronic compass. So, alternative solutions for
orientation may be developed.
The external communication between unmanned
vehicles for Multi-agent systems development will
be implemented too. The Jason framework provides
a group of communication internal actions that
works along only with virtual agents into the same
simulated environment. However this
communication does not work between vehicle's that
not share the same simulated environment. So, a
group of firmware communications functions that
receives the data from another vehicle into the real
world and transfer it properly until reach the
Reasoning Agent layer are necessary.
ACKNOWLEDGEMENTS
We would like to acknowledge all the support of
DIREX and DEAC division at CEFET/RJ.
REFERENCES
Bellifemine, F., Caire, G., and Greenwood, D. (2007).
Developing multi-agent systems with JADE. Wiley
series in agent technology.
Bordini, R. H., Hubner, J. F., and Wooldridge, W. (2007).
Programming Multi-Agent Systems in AgentSpeak
using Jason. Jonh Wiley and Sons, London.
Bratman, M. (1987). Intention, Plans and Practical
Reasoning. Center for the Study of Languages and
Information, Harvard University Press.
Busetta, P. (1999). JACK Intelligent Agents –
Components for Intelligent Agents in Java. AgentLink
Newsletter, Melbourne, Australia, v.2, pages 2-5.
Ferber, J. (1998). Multi-agent systems: An Introduction To
Distributed Artificial Intelligence. Addison-Wesley,
United Kingdom, London.
Hama, M. T., Allgayer, S. R., Pereira, E. C., and Bordini,
R. H. (2011). UAVAS: AgentSpeak Agents for
Unmanned Aerial Vehicles. In Proceedings of the 2nd
Workshop on Autonomous Software Systems.
Huff, N., Kamel, A., Nygard, K. (2003). An Agent Based
Framework for Modeling UAV’s. In Proceedings of
Computer Applications in Industry and Engineering,
Las Vegas, Nevada, USA, pages 139-144.
Karim, S., Heinze, C. (2005). Experiences with the Design
and Implementation of an Agent Based Autonomous
UAV Controller. In Proceedings of Autonomous
Agents and Multiagents Systems, Melbourne, pages
19-26.
Milone, E. F., and Wilson, W. J. F. (2008). Solar System
Astrophysics: Planetary Atmospheres and the Outer
Solar System. Springer, New York.
Wallis, P., Ronnquist, R., and Lucas, A. (2002). The
Automated Wingman – Using JACK intelligent agents
for Unmanned Autonomous Vehicles. In Proceedings
of Aerospace Conference, IEEE, volume 5, pages
2615-2622.
Wooldridge, M. (2000). Reasoning about rational agents.
Intelligent robotic and autonomous agents. MIT Press.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
266
