
Hierarchical HMM-based Failure Isolation for Cognitive Robots
Dogan Altan and Sanem Sariel-Talay
Artificial Intelligence and Robotics Laboratory,
Department of Computer Engineering, Istanbul Technical University, Istanbul, Turkey
Keywords:
Probabilistic Failure Isolation, Cognitive Robots, Hierarchical Hidden Markov Models, Model-based Diagno-
sis, Uncertain Reasoning.
Abstract:
Robots execute their planned actions in the physical world to accomplish their goals. However, since the real
world is partially observable and dynamic, failures may occur during the execution of their actions. These
failures should be detected immediately, and the underlying reasons of these failures should be isolated to
ensure robustness. In this paper, we propose a probabilistic and temporal model-based failure isolation method
that maintains Hierarchical Hidden Markov Models (HHMMs) in order to represent and reason about different
failure types. The underlying reason of a failure can be isolated efficiently by multi-hypothesis tracking.
1 INTRODUCTION
A monitoring system is pivotal in order to achieve
goals robustly in the face of uncertainties. During the
execution of plans, robots may face several types of
failures (Karapinar et al., 2012). A monitoring pro-
cedure should take place which can be in both plan
and action level to detect these failures. Although de-
tecting failures is one of the central problems for ro-
bust execution (Pettersson, 2005; Usug et al., 2012;
Karapinar et al., 2013), the robot should also identify
the reason of the failures to efficiently recover from
them. Isolation of a failure requires an inference pro-
cess to find the underlying reason behind the failure.
In this research, our focus is on a probabilistic fail-
ure isolation method. We address action execution
failures that may arise due to hardware/sensor limita-
tions, limited knowledge on some environmental fea-
tures (Bouguerra et al., 2008) or external events.
Monitoring and reasoning about failures requires
interpreting data from one or more sensors (e.g., vi-
sion, force, touch or pressure). Therefore, in order to
detect a failure, the robot needs to interpret the scene
and apply certain reasoning tools to come up with cor-
rect conclusions. A similar procedure should be ap-
plied in order to isolate a failure. To achieve accurate
isolation, the robot needs to maintain a priori informa-
tion on the models of failures that are likely to occur
in the environment.
In some cases, the reason of the failure may not be
directly related to the action in execution. The reason
of the failure may be an undesired effect of a previ-
ous action that is executed by the robot or an exter-
nal event. For example, in the blocks world domain,
when the base block structure is not properly formed,
the execution of a stack action on the existing tower
may fail, and the whole structure may be completely
destroyed. In order to isolate these types of failures,
a temporal reasoning model is needed. Furthermore,
there may be more than one cause of a failure. To
deal with such cases, a probabilistic temporal model
is required to identify the possible failure cases.
We propose a Hierarchical Hidden Markov Model
(HHMM)-based isolation method to determine the
cause of a failure. Our method includes parallel HH-
MMs representing different failure types that are be-
ing modelled. The HHMM model provides temporal
analysis of states and propagates temporal failure in-
formation over time after a deviation occurs. Multiple
hypotheses are tracked at the same time to identify the
underlying cause in a probabilistic manner. Our main
contribution in this paper is modelling each failure
type as a distinct HHMM considering action-failure
relations and using these models in parallel. This rep-
resentation makes it possible to isolate several types
of failures including persistent ones on a specific ob-
ject or event. The rest of the paper is organized as
follows. First, literature review on fault isolation is
presented. Then, our proposed method is explained
as a proof of concept. Finally, the paper is concluded.
299
Altan D. and Sariel-Talay S..
Hierarchical HMM-based Failure Isolation for Cognitive Robots.
DOI: 10.5220/0004921502990304
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 299-304
ISBN: 978-989-758-016-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2 RELATED WORK
Failure detection and isolation (diagnosis) is an in-
tensively investigated issue for robot systems due to
the need for safe plan execution (Pettersson, 2005;
Fritz, 2005). A common approach to detect failures is
using an observer-based approach (Nan et al., 2008;
Steinbauer and Wotawa, 2009). In this approach, pre-
defined models and inconsistencies between the ex-
pected and observed outcomes are checked to detect
failures. Uncertainties may lead a robot to faulty sit-
uations. This is handled with semantic knowledge-
based execution monitoring where the robot estimates
a probability distribution according to its expectations
(Bouguerra et al., 2007).
Model-based failure diagnosis has been investi-
gated by many researchers previously (Frank et al.,
2000). Structural abstraction is used for model-based
diagnosis in an earlier work (Chittaro and Ranon,
2004). In some model-based fault detection and iso-
lation systems, HMMs are used to monitor processes
(Hovland and McCarragher, 1998) or to diagnose fail-
ures in different domains (Kwon and Kim, 1999; Ying
et al., 2000; Ocak and Loparo, 2001; Ge et al., 2004;
Lee et al., 2004; Li et al., 2005). However, none
of these models uses hierarchical models. Dynamic
Bayesian Networks and Particle Filters are also used
for failure diagnosis (Flores-Quintanilla et al., 2005;
Verma et al., 2004). In another work (Verma et al.,
2002a), Partially Observable Markov Decision Pro-
cesses (POMDPs) and Particle Filters are used in or-
der to model and track failures in autonomous sys-
tems. In another work, a hierarchical representation
is used for failure diagnosis (Verma et al., 2002b);
however, it can not handle multiple faults. Hierarchi-
cal HMMs are also used in prognostics for estimating
remaining useful time (RUL) in machinery processes
(Camci and Chinnam, 2010).
Logic programming with situation calculus is also
studied in order to explain the unexpected devia-
tions in task execution depending on inconsisten-
cies among the hypotheses using their costs (Gspandl
et al., 2012).
Our HHMM-based failure isolation method dif-
fers from earlier work because of its ability in recog-
nizing failures hierarchically in parallel and its usage
of relations between actions and failure types. Our
system can determine that a failure may be caused by
multiple fault sources, and it may provide several ex-
planations for the cause of a failure if there is no clear
indication of the failure. Moreover, persistent failures
on a specific object or event can be isolated.
3 PROBABILISTIC FAILURE
ISOLATION FOR ROBOTS
In the symbolic level, a robot maintains the models
of its operators corresponding to the actions that it
can execute in the real-world such as pick-up, stack,
move and put-down. Each action is represented by a
set of facts to be satisfied before executing it, namely
preconditions, and its effects that occur in the world
after the action is executed by the robot.
In order to reach a desired goal, the robot should
come up with a symbolic plan. After executing the
consecutive actions in this plan, the robot is expected
to reach its desired goal state. However, due to unex-
pected deviations, failures may prevent the robot from
reaching its goal. When a failure is detected, the robot
should reason about the main cause of the failure for
robust execution. In order to safely end up with its
goal state, the robot should apply a failure isolation
procedure to analyse the faulty situation and find the
reason of this failure. The main focus of our research
is a failure isolation method to determine the reasons
behind a failure after it is detected.
3.1 A Motivating Scenario
Assume that a robot is responsible for transporting
objects to their desired positions in an object manip-
ulation scenario. Initially, all objects are in their ini-
tial positions. The robot is capable of executing some
actions, namely move-to-loc, pick-up, put-down and
move-to-obj. move-to-loc is executedin order to move
the robot from one location to another, whereas move-
to-obj moves the robot to a desired object location.
Action pick-up is executed on an object by the robot’s
gripper to grasp the object. Similarly, put-down is ex-
ecuted for releasing an object from the gripper on the
ground. Considering these actions, the robot comes
up with the following symbolic plan in order to move
an object from its initial location to its desired loca-
tion: [move-to-obj(object), pick-up(object), move-to-
loc(destination), put-down(object)]. After the execu-
tion of the constructed plan, the goal is achieved.
Several types of failures may be faced by the robot
during the execution of its actions in the given plan.
For example, the robot may fail in executing pick-up
action on the object because of wrong grasp position
or its size. Another failure may occur if the robot’s
vision system fails while recognizing the object. Yet
in another scenario, the object may be manipulated by
other agents without any a priori information. In such
cases, the isolation model should give relevant expla-
nations for the causes of these unexpected situations.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
300

3.2 Hierarchical HMM-based Failure
Isolation
Hidden Markov Models (HMMs) (Baum and Petrie,
1966) are probabilistic temporal structures to model
Markov processes. Since failures that occur during
the execution of a plan generally propagate over time,
the problem of identifying failures should be analysed
from a temporal dimension. Furthermore, uncertain-
ties in sensing and non-determinism of actions make
HMM-based models suitable for the failure isolation
problem.
An HMM consists of five components, namely
states, observations, transition probabilities, observa-
tion probabilities and the initial state distribution.
• There are N hidden states in an HMM. Each hid-
den state is denoted with s
i
∈ S where S is the set
of hidden states.
• Transition model, A = a
ij
, defines the probability
of transferring from state s
i
to state s
j
where s
i
, s
j
∈ S.
• Observations, denoted by the y
t
, represent the sen-
sory information gathered at time t.
• Observation model, denoted by B = b
s
i
(y), defines
the probability of gathering the observation y at
state s
i
.
• Initial state probability distribution is represented
with π = π
i
.
An HHMM is a derived structure of an HMM in
which each state in the model is itself an HMM (Fine
et al., 1998). Once a node at time step t is activated
in the HHMM, a new HMM is created under the cor-
responding node for that time step. Transitions inside
that newly created HMM in the lower level are called
horizontal transitions. Whenever the newly generated
HMM comes to an end, a vertical transition occurs,
and the process of updating HHMMs goes on from
the node in the corresponding upper level in the cor-
responding model. Note that a horizontal transition
does not take place in the upper level before the newly
created HMM reaches its final state.
In our approach, we employ two-level HHMMs
running in parallel. The type of a failure that may oc-
cur during the execution of an action, is modelled as a
distinct HHMM. HHMMs are used to represent fail-
ure models instead of classical HMMs because a hier-
archy between the plan and actions is needed in order
to isolate persistent failures. For instance, the robot’s
vision system may fail to recognize a specific object
in the environment continually. Each model running
parallel is denoted by M
i
∈ M where i is the index
of the corresponding failure type. Each state in M
i
is defined as M
i
[ws
j
] where ws
j
is the representation
of the world state at discrete time step j of the plan.
Each M
i
[ws
j
] in the models has a latent value that is
either success or failure. The problem is to find mod-
els that include latent variables labelled with failure
and have probabilities over a given threshold. These
models are treated as possible reasons of a failure.
Table 1: Action-Failure relations used in the model.
Action FailureType
move-to-obj(object)
Vision(object), ExternalEvent
Localization(Robot)
move-to-loc(destination) Localization(Robot)
pick-up(object)
ExternalEvent, Gripper(Robot)
Vision(object), Localization(Robot)
put-down(object) Gripper(Robot)
Causes of action execution failures that are ad-
dressed in this paper are: vision failures for all
objects, localization failures, hardware limitations
(actuator/effector) and external events. Vision(X)
is a failure model for a specific object(X) repre-
senting a faulty situation in the vision algorithm
to recognize a specific object. HardwareLimita-
tion(actuator/effector) model indicates situations that
are beyond the physical capabilities of the robot. Ex-
ternalEvent model stands for exogenous events that
change the world outside the control of the robot. Lo-
calization failure model represents the faulty situa-
tions where the robot cannot correctly localize itself.
Depending on the action that is being executed at a
given world state and its parameters, the related fail-
ure models are activated and treated as active mod-
els where unrelated models are considered as passive
models. The relations that define which action is re-
lated to which failure type are given in Table 1 for a
specific object.
Table 2: Predicates and the related sensory data.
Predicate Source
object RGB-D Camera
clear RGB-D Camera
onground RGB-D Camera
segment RGB-D Camera
handempty Pressure sensor
holding Pressure sensor
The world state of the robot is maintained by using
sensory and motor information. Table 2 lists the ob-
servable predicates of the world state that we consider
and the related sensors providing the relevant data.
object predicate is for representing the verified exis-
tence of an object. clear is for stating that the object
has nothing on it. onground stands for the situation
that an object is on the ground. segment corresponds
to a point cloud clustered by the segmentation algo-
rithm but not detected by the vision algorithm. These
HierarchicalHMM-basedFailureIsolationforCognitiveRobots
301

predicates are observed with the on-board RGB-D
camera using a template-based vision algorithm in our
system (Ersen et al., 2013). handempty states that the
robot’s gripper is available to hold an object whereas
holding is for stating that an object is grasped by the
robot. Observation probabilities are defined regarding
to the statistical analysis on the outputs of the sensors
and the related predicate computations. A scene inter-
pretation (Ozturk et al., 2014) module maintains these
predicates in the robot’s knowledge base, and updates
them according to new observations. It should also
be noted that transition and observation probabilities
for different failure types are different from each other
due to the difference in models.
Algorithm 1: FailureIsolation(P,M).
Input: P, Plan; M, Failure models
Output: list, the list of the candidate causes of a failure
while P 6=
/
0 and status == success do
action = POP(P)
while (status = execute(action)) == inExecution do
updateLowerLevelModels(M, action)
end while
applyVerticalTransition(M, ws
j
)
updateHigherLevelModels(M, action)
end while
for all M
i
do
labelUpperLevelLatents(M
i
)
end for
list = isolateModels(M)
return list
Our failure isolation method is applied by running
Algorithm 1. It accepts a plan and failure models as
parameters. Plan P includes a sequence of actions to
be executed by the robot. Failure models, represented
with M, include parallel HHMM-based failure mod-
els. After the execution of the given algorithm, a list,
initially empty, that contains possible candidates of a
failure is returned. Actions in the given plan is exe-
cuted consecutively. An action can be in one of the
following states: inExecution, success and failure. in-
Execution corresponds to the state in which the robot
executes that action. success stands for the state that
the robot reached the expected outcomes of the corre-
sponding action. failure corresponds to the situations
where the expected outcomes of an action are not met.
During the execution of each action, all HHMM-
structured models’ lower levels related to the cor-
responding failure types are considered as active
models, and updated by the updateLowerLevelMod-
els(M,action). Predefined relations between actions
(with their parameters) and failure types are used to
determine whether the executed action is related to the
failure type. If an action is related to a failure type, the
corresponding failure type’s HHMM is treated as an
active model, and it is activated for that time step.
Algorithm 2: updateHigherLevelModels(M, action).
Input: M, Failure models; action, Current action
Output: M
i
, Updated models
for all M
i
do
if isRelated(M
i
, action) then
addNewState(M
i
)
else
extendPreviousState(M
i
)
end if
end for
Observations are gathered from the sensors of the
robot (e.g., pressure sensor, RGB-D sensor, etc.), and
these observations are mapped into a probability dis-
tribution which depends on the sensors’ statistical
analysis. Depending on the observations gathered at
the current state, the new state’s properties are cal-
culated considering the previous state because of the
Markov property with the following formulas where
v
t
is the Viterbi value which is calculated for each
time step t, and δ
t
is the state index that maximizes
the given statement.
v
t
(s
i
) = max
k
(v
t−1
(k) ∗ a(k, s
i
)) ∗ b
s
i
(y
t
)
δ
t
(s
i
) = argmax
k
(v
t−1
(k) ∗ a(k, s
i
))
After the execution of the corresponding
action, a vertical transition occurs with the
applyVerticalTransition(M,S
i
) function by using
the minimum observation probability in the related
model’s lower layer for that action’s time interval.
updateHigherLevelModels(M,action) updates all
HHMMs’ upper levels considering the action-failure
relations. This procedure is implemented in Algo-
rithm 2. This algorithm updates all related models
according to the action in execution and its current
outcomes. In order to infer action-failure relations,
the predefined relations (Table 1) and the parameters
of the executed action are used. In an active model
case, a new state is generated and the v
t
(s
i
) and δ
t
(s
i
)
values are updated according to the given formulas.
Otherwise, if a failure model is not related to the
action in execution, it is treated as a passive model,
and the last state of the corresponding HHMM’s time
interval is extended without generating a new state.
This procedure goes on until the robot reaches
the goal state or a failure is detected. We as-
sume that failure detection is done by applying
an observer-based approach. In case of a fail-
ure, labelUpperLevelLatents(M
i
) procedure assigns
the hidden valuesof each state in the upper level of the
model by using the Viterbi algorithm (Viterbi, 1967).
Viterbi algorithm is invoked to label latent variables
with a value that is either success or failure in each
HHMM. It simply starts from the end node of an
HMM and labels the latent variables for each node
considering the calculated v and δ values during the
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
302
ws
2
ws
3
ws
1
M
i
Plan
action
3
action
1
action
2
S
1
S
k
S
t
...
Failure Model (i)
Failure Model (i)
...
y
1
y
k
y
t
S
1
S
k
S
t
...
...
y
1
y
k
y
t
S
1
S
k
S
t
...
Failure Model (i)
...
y
1
y
k
y
t
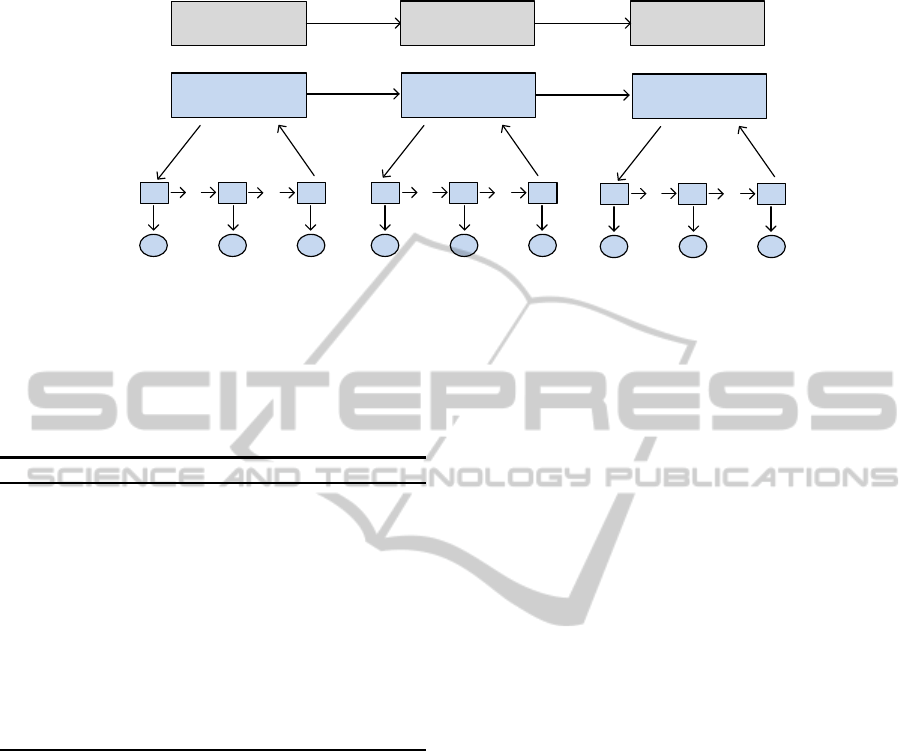
Figure 1: An illustration of an HHMM failure model corresponding to the actions of a given plan.
execution of the plan. At the end of the Algorithm
1, a list that contains the possible causes of the fail-
ure with a probability exceeding a given threshold is
returned with the Algorithm 3.
Algorithm 3: isolateModels(M).
Input: M, Failure models
Output: list, the list of the candidate causes of a failure
list =
/
0
for all M
i
do
for all ws
j
do
if M
i
.getHiddenState(ws
j
) == failure and
M
i
.getProbability(ws
j
) ≥ threshold then
list.add(M
i
)
break
end if
end for
end for
return list
Figure 1 is given in order to give the general
overview of using parallel HHMMs for failure isola-
tion. Upper level in the figure represents the sym-
bolic plan given to the robot. Under this plan, a
failure model (M
i
) represented as an HHMM. In this
HHMM, each top node has its own HMM. During the
execution of action
1
, the first top node of the model’s
lower level HMM is updated with the sensory infor-
mation (y
t
). After mapping each observation in each
discrete time step into a probability distribution by us-
ing conditional probability tables (CPTs), properties
of the newly generated node of the HMM are com-
puted. This procedure is repeated similarly for the
other related failure models considering the action-
failure relations. In case of a failure, Viterbi algorithm
is invoked, and the candidate models explaining the
faulty situation are determined.
4 CONCLUSIONS
In this paper, we present a temporal model for fail-
ure isolation that maintains HHMMs. HHMMs are
used for modelling the possible failure types. Us-
ing the temporal filtering property of the HMMs, fail-
ures that occur because of a previously executed ac-
tion can efficiently be isolated. Using the relations
between the actions and the failure types, only corre-
sponding models are updated. This reduces the com-
putational cost of the method. Moreover, HHMMs
ensure isolation of multiple faults and propose expla-
nations for possible faulty situations. Our future work
includes evaluation of the proposed method in several
real robot scenarios.
ACKNOWLEDGEMENTS
This research is funded by a grant from the Scien-
tific and Technological Research Council of Turkey
(TUBITAK), Grant No. 111E-286. TUBITAK’s sup-
port is gratefully acknowledged. Authors would also
like to thank Mustafa Ersen, Melis Kapotoglu, Ca-
gatay Koc, Melodi Deniz Ozturk and Mehmet Biberci
for their helpful comments on this research.
REFERENCES
Baum, L. E. and Petrie, T. (1966). Statistical inference for
probabilistic functions of finite state markov chains.
The Annals of Mathematical Statistics, 37(6):pp.
1554–1563.
Bouguerra, A., Karlsson, L., and Saffiotti, A. (2007). Han-
dling uncertainty in semantic-knowledge based exe-
cution monitoring. In Intelligent Robots and Systems,
2007. IROS 2007. IEEE/RSJ International Conference
on, pages 437–443.
HierarchicalHMM-basedFailureIsolationforCognitiveRobots
303

Bouguerra, A., Karlsson, L., and Saffiotti, A. (2008). Mon-
itoring the execution of robot plans using seman-
tic knowledge. Robotics and Autonomous Systems,
56(11):942–954.
Camci, F. and Chinnam, R. (2010). Health-state estima-
tion and prognostics in machining processes. Automa-
tion Science and Engineering, IEEE Transactions on,
7(3):581–597.
Chittaro, L. and Ranon, R. (2004). Hierarchical model-
based diagnosis based on structural abstraction. Ar-
tificial Intelligence, 155(12):147 – 182.
Ersen, M., Sariel-Talay, S., and Yalcin, H. (2013). Extract-
ing spatial relations among objects for failure detec-
tion. In Proceedings of the KI 2013 Workshop on Vi-
sual and Spatial Cognition.
Fine, S., Singer, Y., and Tishby, N. (1998). The hierarchi-
cal hidden markov model: Analysis and applications.
Machine Learning, 32(1):41–62.
Flores-Quintanilla, J., Morales-Menendez, R., Ramirez-
Mendoza, R., Garza-Castanon, L., and Cantu-Ortiz, F.
(2005). Towards a new fault diagnosis system for elec-
tric machines based on dynamic probabilistic models.
In American Control Conference, 2005. Proceedings
of the 2005.
Frank, P. M., Ding, S. X., and Marcu, T. (2000). Model-
based fault diagnosis in technical processes. Trans-
actions of the Institute of Measurement and Control,
22(1):57–101.
Fritz, C. (2005). Execution monitoring – a survey. Technical
report, University of Toronto.
Ge, M., Du, R., and Xu, Y. (2004). Hidden markov model
based fault diagnosis for stamping processes. Me-
chanical Systems and Signal Processing, 18(2):391 –
408.
Gspandl, S., Podesser, S., Reip, M., Steinbauer, G., and
Wolfram, M. (2012). A dependable perception-
decision-execution cycle for autonomous robots. In
Robotics and Automation (ICRA), 2012 IEEE Inter-
national Conference on, pages 2992–2998.
Hovland, G. and McCarragher, B. J. (1998). Hidden markov
models as a process monitor in robotic assembly. I. J.
Robotic Res., 17(2):153–168.
Karapinar, S., Altan, D., and Sariel-Talay, S. (2012). A
robust planning framework for cognitive robots. In
Proceedings of the AAAI-12 Workshop on Cognitive
Robotics (CogRob).
Karapinar, S., Sariel-Talay, S., Yildiz, P., and Ersen, M.
(2013). Learning guided planning for robust task ex-
ecution in cognitive robotics. In The AAAI-13 Work-
shop on Intelligent Robotic Systems, Bellevue, USA.
Kwon, K.-C. and Kim, J.-H. (1999). Accident identifi-
cation in nuclear power plants using hidden markov
models. Engineering Applications of Artificial Intelli-
gence, 12(4):491 – 501.
Lee, J. M., Kim, S.-J., Hwang, Y., and Song, C.-S. (2004).
Diagnosis of mechanical fault signals using continu-
ous hidden markov model. Journal of Sound and Vi-
bration, 276(35):1065 – 1080.
Li, Z., Wu, Z., He, Y., and Fulei, C. (2005). Hidden markov
model-based fault diagnostics method in speed-up and
speed-down process for rotating machinery. Mechan-
ical Systems and Signal Processing, 19(2):329 – 339.
Nan, C., Khan, F., and Iqbal, M. T. (2008). Real-time fault
diagnosis using knowledge-based expert system. Pro-
cess Safety and Environmental Protection, 86(1):55 –
71.
Ocak, H. and Loparo, K. (2001). A new bearing fault de-
tection and diagnosis scheme based on hidden markov
modeling of vibration signals. In Acoustics, Speech,
and Signal Processing, 2001. Proceedings. (ICASSP
’01). 2001 IEEE International Conference on, vol-
ume 5, pages 3141–3144 vol.5.
Ozturk, M. D., Ersen, M., Kapotoglu, M., Koc, C., Sariel-
Talay, S., and Yalcin, H. (2014). Scene interpre-
tation for self-aware cognitive robots. In AAAI-14
Spring Symposium on Qualitative Representations for
Robots.
Pettersson, O. (2005). Execution monitoring in robotics: A
survey. Robotics and Autonomous Systems, 53:73–88.
Steinbauer, G. and Wotawa, F. (2009). Robust plan ex-
ecution using model-based reasoning. Advanced
Robotics, 23(10):1315–1326.
Usug, U. C., Altan, D., and Sariel-Talay, S. (2012). Robots
that create alternative plans against failures. In 10th
IFAC Symposium on Robot Control.
Verma, V., Fernandez, J., Simmons, R., and Chatila, R.
(2002a). Probabilistic models for monitoring and fault
diagnosis. In The Second IARP and IEEE/RAS Joint
Workshop on Technical Challenges for Dependable
Robots in Human Environments.
Verma, V., Gordon, G., Simmons, R., and Thrun, S.
(2004). Real-time fault diagnosis [robot fault diagno-
sis]. Robotics Automation Magazine, IEEE, 11(2):56–
66.
Verma, V., Simmons, R., and Fernndez, J. (2002b). Proba-
bilistic models for monitoring and fault diagnosis. In
The Second IARP and IEEE/RAS Joint Workshop on
Technical Challanges for Dependable Robots in Hu-
man, pages 43–67.
Viterbi, A. (1967). Error bounds for convolutional
codes and an asymptotically optimum decoding al-
gorithm. Information Theory, IEEE Transactions on,
13(2):260–269.
Ying, J., Kirubarajan, T., Pattipati, K., and Patterson-Hine,
A. (2000). A hidden markov model-based algorithm
for fault diagnosis with partial and imperfect tests.
Systems, Man, and Cybernetics, Part C: Applications
and Reviews, IEEE Transactions on, 30(4):463–473.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
304
