
Silent Speech for Human-Computer Interaction
João Freitas
1,2
, António Teixeira
2
and Miguel Sales Dias
1,3
1
Microsoft Language Development Center, Lisboa, Portugal
2
Departamento de Electrónica Telecomunicações e Informática/IEETA, Universidade de Aveiro, Aveiro, Portugal
3
ISCTE-University Institute of Lisbon, Lisboa, Portugal
1 STAGE OF THE RESEARCH
Speech communication has been and still is the
dominant mode of human-human communication
and information exchange. Therefore, an interface
based on speech allows people to interact with
machines in a more natural and effective way
(Teixeira et al., 2009) and, for this reason, spoken
language technology has suffered a significant
evolution in the last years. However, conventional
automatic speech recognition (ASR) systems use
only a single source of information – the audio
signal. When this audio signal becomes corrupted in
the presence of environmental noise or assumes
particular patterns, like the ones verified in elderly
speech, speech recognition performance degrades,
leading users to opt by a different modality or to not
use the system at all. This type of systems have also
revealed to be inadequate in situations where privacy
is required, for users without the ability to produce
an audible acoustic signal (e.g. users who have
undergone a laryngectomy) and users with speaking
difficulties and speech impairments.
To tackle these problems and being speech a
privileged interface for Human-Computer
Interaction (HCI), a novel Silent Speech Interface
(SSI) based on multiple modalities is envisioned.
We propose an SSI for European Portuguese (EP), a
language for which no SSI has yet been developed.
In our in depth state-of-the-art critical assessment,
we have identified several modalities to convey
silent speech data and address the issues raised by
adapting existing work on SSIs to EP such as, the
recognition of nasal vowels. From this analysis
several modalities with low-invasiveness were
selected and a set of preliminary experiments based
on Video, Depth, Surface Electromyography
(sEMG) and Ultrasonic Doppler Sensing (UDS)
were conducted. Taking in consideration the results
from the literature review and the experiments, we
have decided to develop a multimodal SSI for EP.
Results have also show recognition problems
between minimal pairs of words that only differ on a
nasal sound using the visual and the sEMG
approach, supporting our planned development of an
SSI based on the fusion of multiple modalities and
motivating the investigation of the detection of nasal
sounds using less invasive approaches. We are
presently collecting the necessary corpora for
developing a prototype and analysing the use of an
additional sEMG sensor to capture the myoelectric
signal coming from the muscles related with the
nasality phenomena.
2 OUTLINE OF OBJECTIVES
The objectives defined for this PhD thesis are the
following:
European Portuguese Adoption – The adaptation
of SSIs to a new language and the procedures
involved constitute by itself an extension to the
current scientific knowledge in this area. With this
work we will address the challenges of developing a
SSI for EP, the first approach for this language in the
Portuguese and international academia. Using the
techniques described in literature and adapting them
to a new language will provide novel information
towards language independence and language
adoption techniques.
Identify and Address Problems caused by
Nasality – Motivated by the EP adoption, one of the
areas of research to address is the problem of
recognizing nasal sounds, as pointed out in (Denby
et al., 2010). Considering the particular nasal
characteristics associated with EP, we have noticed
performance deterioration in terms of recognition
rates and accuracy using existent approaches. When
this occurs, the root of the system performance
deterioration cause needs to be identified and new
techniques based on that information need to be
thought. For example, adding a sensor that that can
provide complementary information. This will allow
concluding particular aspects that influence language
expansion, language independency and limitations
18
Freitas J., Teixeira A. and Dias M..
Silent Speech for Human-Computer Interaction.
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

of SSIs for the EP case.
Multi-sensor Analysis - An SSI can be
implemented using several types of sensors working
separately or a multimodal combination of them in
order to achieve better results. For this work we will
preferably adopt the less invasive approaches and
sensors that are able to work both in silent and noisy
environments. Further investigation will also be
conducted on silent speech processing, respectively
on data acquisition, feature extraction, and
classification, as well as, on combining techniques
through multiple sensor devices, data fusion and
solving asynchrony issues verified in different
signals (Srinivasan et al., 2010) in order to
complement and overcome the inherent
shortcomings of some approaches without
decreasing the usability of the system.
User Requirements and Scenarios Definition -
After determining the different possibilities for each
type of SSI, a hybrid and minimally invasive
solution will be envisioned, specified, developed and
tested, including existing hardware components and
new software solutions, and targeting a universal
interface that includes elderly people. The specific
limitations and requirements imposed by an elderly
speaker need to be stipulated based on a pre-defined
user profile in order to provide an efficient use of the
interface. During the full span of the project
duration, close contact with end-users will be
sought, starting from user requirements’ capture to
the adoption of a full usability evaluation
methodology, which will collect feedback and draw
conclusions based on real subjects while interacting
(using SSI) with computing systems and
smartphones, respectively, in real case indoor home
scenarios and in mobility environments.
Usability Evaluation - Usability evaluation will be
conducted, considering different groups of users.
The usability evaluation will be focused on real case
indoor home scenarios. This evaluation will also
include a comparison study, similar to the ones
described in (Freitas et al., 2009) towards traditional
interfaces such as, mouse and keyboard.
Fulfilling these objectives, even partially, will
contribute to expanding knowledge in different areas
of research. The used methodology will be based in
state-of-the-art assessment, analytical modelling of
the proposed solutions, specification, development,
test and concrete deployment of algorithms and
software systems, including also external sourcing of
hardware components in the specified use cases and
usability evaluation of such cases with end-users.
3 RESEARCH PROBLEM
An SSI performs ASR in the absence of an
intelligible acoustic signal and can be used as a
human-computer input modality in high-
background-noise environments such as, living
rooms, or in aiding speech-impaired individuals
which are unable to benefit from the current HCI
systems based on speech. By acquiring sensor data
from elements of the human speech production
process – from glottal and articulators activity, their
neural pathways or the brain itself – an SSI produces
an alternative digital representation of speech, which
can be recognized and interpreted as data,
synthesized directly or routed into a communications
network. Informally, one can say that a SSI extends
the human speech production model by the signal
data of electrodes, ultrasonic receivers, cameras and
other sources. This provides a more natural
approach than currently available speech pathology
solutions like, electrolarynx, tracheo-oesophageal
speech, and cursor-based text-to-speech systems
(Denby et al., 2010).
Since they are still at an early stage SSI systems
aimed at HCI present several problems:
Currently, and to our knowledge, no SSI system
exists for European Portuguese, leaving European
Portuguese users with speech impairments unable to
interact with HCI systems based on speech.
Furthermore, no study or analysis has been made
regarding the adoption of a new language with
distinctive characteristics to this kind of systems,
and the problems that may arise from applying
existent work to EP are unknown. A particularly
relevant characteristic of EP are the nasal sounds,
which may pose problems to several SSI modalities.
Another problem with the current SSI modalities
is how to achieve satisfactory accuracy rates without
a high degree of invasiveness. The notion of a SSI
system entails that no audible acoustic signal is
available, requiring speech information to be
extracted from articulators, facial muscle movement
and brain activity. Considering a real world scenario,
this often leads to unpractical and invasive solutions
due to the difficulty in extracting silent speech
information using current technologies.
SSI systems are also not directed for all types of
users, especially the elderly, which impose several
limitations and requirements. Elderly population
individuals have developed resistance to
conventional forms of human-computer interaction
(Phang et al., 2006) like the keyboard and mouse,
therefore making it necessary to test new natural
forms of interaction such as silent speech. In
SilentSpeechforHuman-ComputerInteraction
19
addition, elder people often have difficulties with
motor skills due to health problems such as arthritis,
so the absence of small and difficult to handle
equipment may be presented as an advantage over
current solutions. It is also known that due to ageing,
senses like vision become less accurate, hence
difficulties in the perception of details or important
information in conventional graphical interfaces may
arise, since current interfaces, most notably in the
mobility area, are not designed with these
difficulties in mind.
In summary, our research problem addresses
SSIs aimed at HCI and four concrete hypothesis can
be extracted, as follows:
1. Is it possible to extend/adapt the work on SSI for
languages such as English to European
Portuguese?
2. Do nasal sounds, particularly relevant in EP,
poses problems to most, if not all, of the
modalities, and is their detection possible using
less invasive SSIs?
3. Does a multimodal approach has the potential to
improve state-of-the-art results using several less
invasive modalities?
4. Can an SSI be used in a real world scenario,
robust enough to be usable, with sufficient user
satisfaction, by all users including the elderly?
4 STATE OF THE ART
Several SSI based on different sensory types of data
have been proposed in the literature and a detailed
overviews can be found in Denby et al., (2009) and
Freitas et al., (2011). In this section we summarize
the existent approaches grouped according to the
human speech production model.
The speech production model can be divided into
several stages. According to Levelt (1989), the
communicative intention is the first phase of each
speech act and consists in converting patterns of
goals into messages followed by the grammatical
encoding of the preverbal message to surface
structure. The next phase of the speech production is
the passage from the surface structure to the
phonetic plan, which, informally speaking is the
sequence of phones that are fed to the articulators.
This can be divided between the electrical impulse
fed into the articulators and the actual process of
articulating. The final phase consists on the
consequent effects of the previous phases.
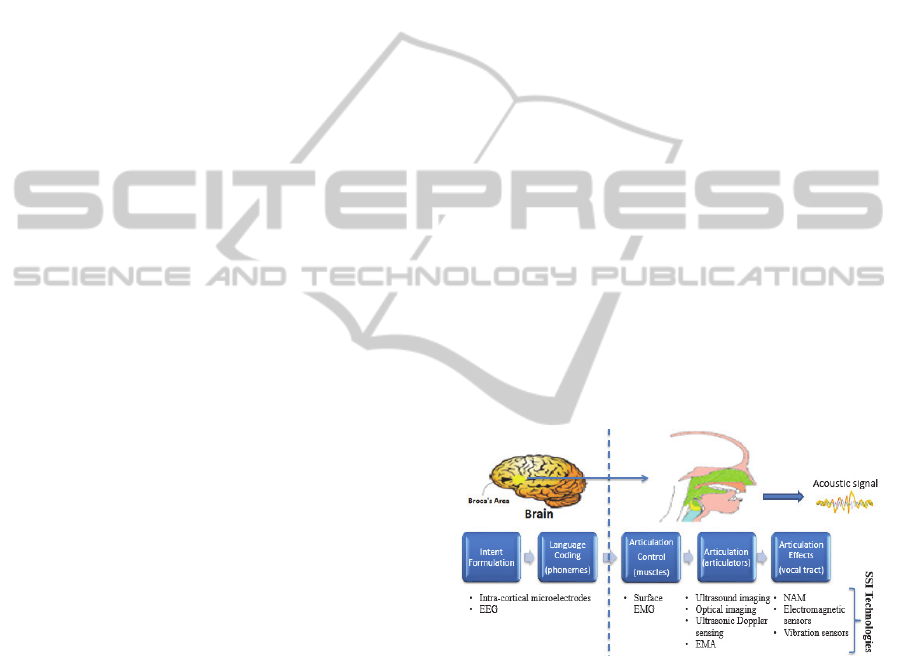
The existent experimental SSI systems described
in the literature, cover information extraction from
all the stages of speech production, from intention to
articulation effects, as depicted on Figure 1. The
current approaches can then be divided as follows:
Intention level (brain / Central Nerve System):
Interpretation of signals from implants in the
speech-motor cortex (Brumberg et al., 2010),
Interpretation of signals from electro-
encephalographic (EEG) sensors (Porbadnigk et
al., 2009);
Articulation control (muscles): Surface
Electromyography of the articulator muscles
(Schultz and Wand, 2010);
Articulation (articulators): Capture of the
movement of fixed points on the articulators
using Electromagnetic Articulography (EMA)
sensors (Fagan et al., 2008); Real-time
characterization of the vocal tract using ultra-
sound (US) and optical imaging of the tongue
and lips (Florescu et al., 2010); Capture
movements of a talker’s face through ultrasonic
Doppler sensing (Srinivasan et al., 2010).
Articulation effects: Digital transformation of
signals from a Non-Audible Murmur (NAM)
microphone (Toda et al., 2009); Analysis of
glottal activity using electromagnetic (Quatieri et
al., 2006), or vibration (Patil and Hansen, 2010)
sensors.
Figure 1: Phased speech production model with the
correspondent SSI technologies.
4.1 SSIs for Portuguese
The existing SSI research has been mainly
developed for English, with some exceptions for
French (Tran et al., 2009) and Japanese (Toda et al.,
2009). There was no published work prior to this
thesis for European Portuguese in the area of SSIs,
although there are previous research on related
areas, such as the use of EMA (Teixeira and Vaz,
2001), Electroglotograph and MRI (Martins et al.,
2008) for speech production studies, articulatory
synthesis (Teixeira and Vaz, 2000) and multimodal
BIOSTEC2014-DoctoralConsortium
20
interfaces involving speech (Ferreira et al., 2013).
There are also some studies on lip reading systems
for EP that aim at robust speech recognition based
on audio and visual streams (Pêra et al., 2004); (Sá
et al., 2003). However, none of these addresses EP
distinctive characteristics, such as nasality.
4.2 Multimodal SSIs
In 2004, Denby and Stone (2004), presented a first
experiment where 2 input modalities, in addition to
speech audio, were used to develop an SSI. Denby
and Stone employed ultrasound imaging of the
tongue area, lip profile video and acoustic speech
data with the goal of developing an SSI. More
recently, Florescu et al., (2010), using these same
modalities achieved a 65.3% recognition rate only
considering silent word articulation in an isolated
word recognition scenario with a 50-word
vocabulary using a DTW-based classifier. The
reported approach also attributes substantially more
importance to the tongue information, only
considering a 30% weight during classification for
the lip information. In 2008, Tran et al. (2008), also
reported a preliminary approach using information
from 2 modalities: whispered speech acquired using
a NAM and visual information of the face using the
3D position of 142 coloured beads glued to the
speakers face. Later, using the same modalities, the
same author, achieved an absolute improvement of
13.2% when adding the visual information to the
NAM data stream. The use of visual facial
information combined with sEMG signals has also
been proposed by Yau et al., (2008). In this study
Yau et al. presents an SSI that analyses the
possibility of using sEMG for unvoiced vowels
recognition and a vision-based technique for
consonant recognition. When looking at the chosen
modalities, recent work using video plus depth
information has been presented by Galatas et al.,
(2012), showing that the depth facial information
can improve the system performance over audio-
only and traditional audio-visual systems. In the area
of sEMG-based SSIs, recent research on has been
focused on the differences between audible and
silent speech and how to decrease the impact of
different speaking modes (Wand and Schultz,
2011a); the importance of acoustic feedback (Herff
et al., 2011); EMG-based phone classification
(Wand and Schultz, 2011b); and session-
independent training methods (Wand and Schultz,
2011c). For what UDS is concerned, it has been
applied to several areas (e.g. voice activity detection
(Kalgaonkar et al., 2007), speaker identification
(Kalgaonkar et al., 2008), synthesis (Toth et al.,
2010) and speech recognition with promising results
(Srinivasan et al., 2010); (Freitas et al., 2012).
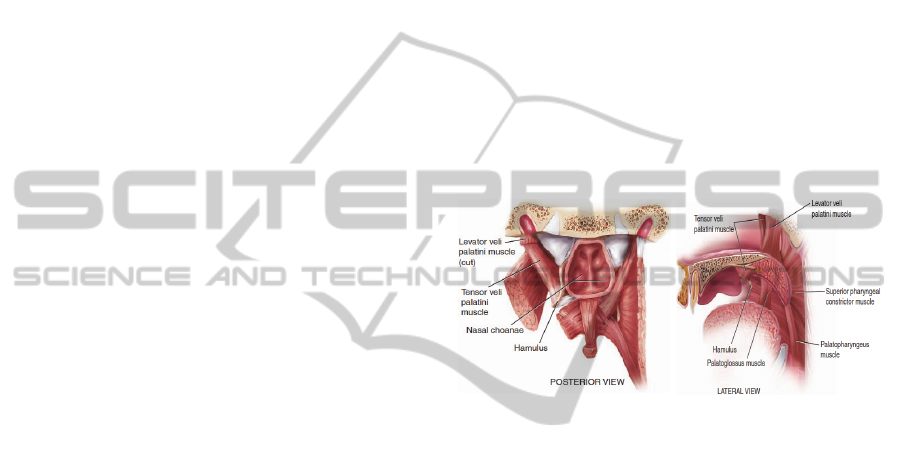
4.3 Nasality Detection
The production of a nasal sound involves air
flow through the oral and nasal cavities. This air
passage for the nasal cavity is essentially controlled
by the velum that, when lowered, allows for the
velopharyngeal port to be open, enabling resonance
in the nasal cavity and the sound to be perceived
nasal. The production of oral sounds occurs when
the velum is raised and the access to the nasal cavity
is closed (Beddor, 1993). The process of moving the
soft palate involves the several muscles (Fritzell,
1969); (Hardcastle, 1976); (Seikel et al., 2010), as
depicted in Figure 2.
Figure 2: Muscles of the soft palate from posterior (left),
and the side (right) view (Seikel et al., 2010).
In previous studies, the application of EMG to
measure the level of activity of these muscles has
been performed by means of intramuscular
electrodes (Fritzell, 1969); (Bell-Berti, 1976) and
surface electrodes positioned directly on the oral
surface of the soft palate (Lubker, 1968); (Kuehn,
1982). Our work differs from the cited papers, since
none of them uses surface electrodes placed in the
face and neck regions, a significantly less invasive
approach and quite more realistic and representative
of the SSIs case scenarios. Also, although
intramuscular electrodes may offer more reliable
myoelectric signals, they also require considerable
medical skills and, for both reasons, intramuscular
electrodes were discarded for this study.
No literature exists in terms of detecting the
muscles involved in the velopharyngeal function
with surface EMG electrodes placed on the face and
neck. Previous studies in the lumbar spine region
have shown that if proper electrode positioning is
considered a representation of deeper muscles can be
acquired (McGill et al., 1996) thus raising a question
that is currently unanswered: is surface EMG
positioned in the face and neck regions able to detect
SilentSpeechforHuman-ComputerInteraction
21
activity of the muscles related to nasal port
opening/closing and consequently detect the nasality
phenomena? Another related question that can be
raised is how we can show, with some confidence,
that the signal we are seeing is in fact the
myoelectric signal generated by the velum
movement and not spurious movements caused by
neighbouring muscles unrelated to the
velopharyngeal function.
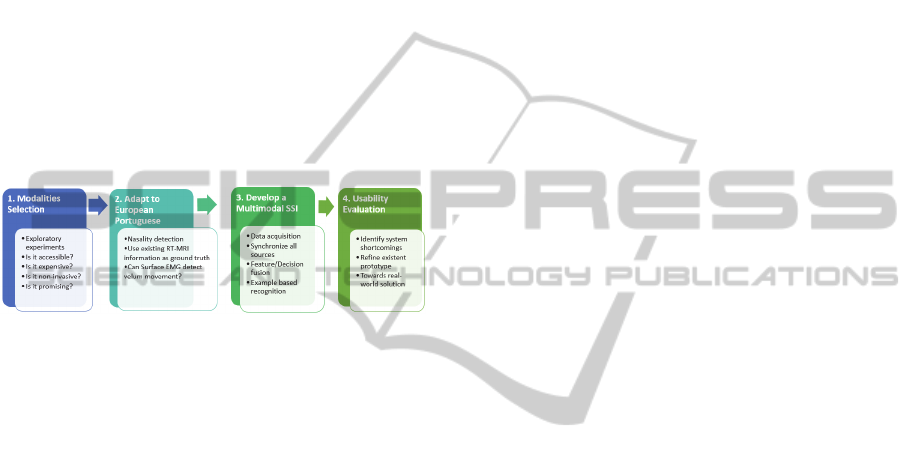
5 METHODOLOGY
The chosen approach to the mentioned research
problems can be divided into 4 main stages, as
depicted in Figure 3. The following subsections
describes each stage in more detail.
Figure 3: Stages of the chosen methodology.
5.1 Modalities Selection
In the initial stage of the PhD, an in depth study of
related work and preliminary evaluation of different
types of SSIs was made, the major problems were
identified and the aim of the thesis was defined. This
initial study contributed to determine which SSI or
SSIs were more suited to the problem and what were
the available resources. Results of this work include
a state-of-the-art assessment as well as the main
issues to be solved. Then by conducting preliminary
experiments with non-invasive and recent modalities
such as Ultrasonic Doppler (Freitas et al., 2012), we
have selected several HCI technologies based on: the
possibility of being used in a natural manner without
complex medical procedures from the ethical and
clinical perspectives, low cost, tolerance to noisy
environments and be able to work with speech-
handicapped users or elderly people, for whom
speaking requires a substantial effort.
5.2 Adapt to European Portuguese
In the second stage of the PhD we chosen to address
a known challenge in SSIs – the detection of
nasality. This decision was motivated by the fact that
nasality is an important characteristic of EP and an
eventual solution for this problem would allow the
development of a more adapted SSI for EP, and also
because preliminary studies have shown current
techniques for silent speech recognition based on
sEMG will present a degraded performance when
dealing with languages with nasal characteristics.
Thus, we started by exploring the existence of useful
information about the velum movement and also by
assessing if deeper muscles could be sensed using
surface electrodes in the regions of the face and neck
and the best electrode location to do so. To
accomplish these tasks, we have applied a procedure
that uses Real-Time Magnetic Resonance Imaging
(RT-MRI), collected from the same speakers,
providing a method to interpret EMG data.
The main idea behind this approach consists in
crossing two types of data containing information
about the velum movement: (1) images collected
using RT-MRI and (2) the myoelectric signal
collected using surface EMG sensors. By combining
these two sources, ensuring compatible scenario
conditions and proper time alignment, we are able to
accurately estimate the time when the velum moves
and the type of movement (i.e. ascending or
descending) under a nasality phenomenon, and
establish the differences between nasal and oral
vowels using surface EMG. Also, we need to know
when the velum is moving, to avoid that signals
coming from other muscles, artefacts and noise be
misinterpreted as signals coming from the target
muscles. To overcome this problem we take
advantage of a previous data collection based on
RT-MRI (Teixeira et al., 2012), which provides an
excellent method to interpret EMG data and estimate
when velum is moving.
Recent advances in MRI technology allow real-
time visualization of the vocal tract with an
acceptable spatial and temporal resolution. This
sensing technology enables us to have access to real
time images with relevant articulatory information
for our study, including velum raising and lowering.
In order to make the correlation between the two
signals, audio recordings were performed in both
data collections by the same speakers. Notice that
EMG and RT-MRI data can't be collected together,
so the best option is to collect the same corpus for
the same set of speakers, at different times, reading
the same prompts in EMG and RT-MRI.
For the EMG and RT-MRI signals
synchronization we start by aligning both EMG and
the information extracted from the RT-MRI with the
corresponding audio recordings. Next, we apply
Dynamic Time Warping (DTW) to the signals,
finding the optimal match between the two
sequences. Based on the DTW result we map the
BIOSTEC2014-DoctoralConsortium
22

information extracted from RT-MRI from the
original production to the EMG time axis,
establishing the needed correspondence between the
EMG and the RT-MRI information, as depicted in
Figure 4.
Figure 4: Exemplification of the warped signal
representing the nasal information extracted from RT-MRI
(dashed red line) superimposed on the speech recorded
during the corresponding RT-MRI and EMG acquisition,
for the sentence [ɐ
̃
pɐ, pɐ
̃
pɐ, pɐ
̃
].
5.3 Multimodal Ssi
The third stage consists in the development of a
multimodal SSI prototype based on the conclusions
of the previous stages. Since no SSI of this kind
exists the first step is to collect data from the
selected modalities in a synchronized way. Having
collected the necessary data a feature selection
analysis must be conducted due to the high number
of information streams (5 if we consider audio) in
order to avoid an excessively high dimensionality
space. During this analysis it is also necessary to
understand how we are going to combine all these
streams and what type of fusion should be used (i.e.
feature or decision fusion, or both) in our pipeline.
Finally, it is necessary to understand what classifier
(or classifiers) is most appropriate for this case.
Since not much data exists for this novel interface,
our aim is to explore example-based methods such
as Dynamic Time Warping.
To the current time we have collected data from
four modalities with the following specifications: (1)
video input, which captures the RGB colour of each
image pixel of the speakers’ mouth region and its
surroundings, including chin and cheeks; (2) depth
input, which captures depth information of each
pixel for the same areas, providing useful
information about the mouth opening and tongue
position, in the sensor reference frame, in some
cases; (3) surface EMG sensory data, which
provides information about the myoelectric signal
produced by the targeted facial muscles during
speech movements; (4) Ultrasonic Doppler Sensing,
a technique which is based on the emission of a pure
tone in the ultrasound range towards the speaker’s
face, that is received by an ultrasound sensor tuned
to the transmitted frequency. The reflected signal
then contains Doppler frequency shifts that correlate
with the movements of the speaker’s face
(Srinivasan et al., 2010). To the best of our
knowledge, this is the first silent speech corpus that
combines more than two input data types and the
first to synchronously combine the corresponding
four modalities, thus, providing the necessary
information for future studies on multimodal SSIs.
After assembling all the necessary data collection
equipment which, in the case of ultrasound, led us to
the development of custom built equipment based on
the work of Zhu (2008), we needed to create the
necessary conditions to record all signals with
adequate synchronization. The challenge of
synchronizing all signals resided in the fact that a
potential synchronization event would need to be
captured simultaneously by all (four) input
modalities. To that purpose, we have selected the
EMG recording device, which had an available I/O
channel, as the source that generates the alignment
pulse for all the remaining modalities. After the data
collection system setup was ready, a proof-of-
concept database, was collected for further analysis.
The devices employed in this data collection
were: (1) a Microsoft Kinect (2013) that acquires
visual and depth information; (2) an sEMG sensor
acquisition system from Plux (2013), that captures
the myoelectric signal from the facial muscles; (3) a
custom built dedicated circuit board (referred to as
UDS device), that includes: 2 ultrasound transducers
(400ST and 400SR working at 40 kHz), a crystal
oscillator at 7.2 MHz and frequency dividers to
obtain 40 kHz and 36 kHz, and all amplifiers and
linear filters needed to process the echo signal
(Freitas et al., 2012).
The Kinect sensor was placed at approximately
0.7m from the speaker. It was configured, using
Kinect SDK 1.5, to capture a colour video stream
with a resolution of 640x480 pixel, 24-bit RGB at 30
frames per second and a depth stream, with a
resolution of 640x480 pixel, 11-bit at 30 frames per
second.
The sEMG acquisition system consisted of 5
pairs of EMG surface electrodes connected to a
device that communicates with a computer via
Bluetooth. As depicted in Figure 5 the sensors were
attached to the skin using a single use 2.50 cm
diameter clear plastic self-adhesive surfaces and
considering an approximate 2.00 cm spacing
SilentSpeechforHuman-ComputerInteraction
23

between the electrodes center for bipolar
configurations. Before placing the surface EMG
sensors, the sensor location was previously cleaned
with alcohol. While uttering the prompts no other
movement, besides the one associated with speech
production, was made. The five electrode pairs were
placed in order to capture the myoelectric signal
from the following muscles: the levator angulis oris
(channel 2); zygomaticus major (channel 2); the
tongue (channel 1 and 5), the anterior belly of the
digastric (channel 1); the platysma (channel 4) and
the last electrode pair was placed below the ear
between the mastoid process and the mandible. The
sEMG channels 1 and 4 used a monopolar
configuration (i.e. placed one of the electrodes from
the respective pair in a location with low or
negligible muscle activity), being the reference
electrodes placed on the mastoid portion of the
temporal bone. The positioning of the EMG
electrodes 1, 2, 4 and 5 was based on previous work
(e.g. Schultz and Wand, 2010) and sEMG electrode
3 was placed according to recent findings by the
authors about the detection of nasality in SSIs
(Freitas et al., 2014).
Figure 5: sEMG electrodes positioning and the respective
channels (1 to 5) plus the reference electrode (R).
The UDS device was placed at approximately
40.0 cm from the speaker and was connected to an
external sound board (Roland, UA-25 EX) which in
turn is connected to the laptop through a USB
connection. The two supported recording channels
of the external sound board were connected to the
I/O channel of the sEMG recording device and to the
UDS device. The Doppler echo and the
synchronization signals were sampled at 44.1 kHz
and to facilitate signal processing, a frequency
translation was applied to the carrier by modulating
the echo signal by a sine wave and low passing the
result, obtaining a similar frequency modulated
signal centered at 4 kHz.
In order to register all input modalities via time
alignment between all corresponding four input
streams, we have used an I/O bit flag in the sEMG
recording device, which has one input switch for
debugging purposes and two output connections, as
depicted in Figure 6. Synchronization occurs when
the output of a synch signal, programmed to be
automatically emitted by the sEMG device at the
beginning of each prompt, is used to drive a led and
to provide an additional channel in an external sound
card. Registration between the video and depth
streams is ensured by the Kinect SDK. Using the
information from the led and the auxiliary audio
channel with synch info, the signals were time
aligned offline. To align the RGB video and the
depth streams with the remaining modalities, we
have used an image template matching technique
that automatically detects the led position on each
colour frame. For the UDS acquisition system, the
activation of the output I/O flag of the sEMG
recording device, generates a small voltage peak on
the signal of the first channel. To enhance and detect
that peak, a second degree derivative is applied to
the signal followed by an amplitude threshold. To be
able to detect this peak, we have previously
configured the external sound board channel with
maximum input sensitivity. The time-alignment of
the EMG signals is ensured by the sEMG recording
device, since the I/O flag is recorded in a
synchronous way with the samples of each channel.
Figure 6: Diagram of the time alignment scheme showing
the I/O channel connected to the three outputs – debug
switch, external sound card and a directional led.
5.4 Usability Evaluation
The last stage of the PhD will be focused on
evaluating the interface usability. Here, usability
evaluation tests using the proposed SSI prototype
will be conducted, allowing to identify
shortcomings, refine previously established user
requirements and improve the existent prototype. In
a first phase of the usability tests, the features
provided by the interface will be tested in the form
of a task that the user must accomplish. For each
subject it will be analysed if the task was
accomplished; how many tries were required; if the
BIOSTEC2014-DoctoralConsortium
24

application flow ran smoothly and how long the user
took to adapt to the system. In these tests, usability
should be evaluated in terms of efficiency,
effectiveness and satisfaction. Concerning
efficiency, the required time to execute a task using
the system, the number of actions and the time spent
with application instructions, should be considered.
In terms of effectiveness, it should be measured if
the task was completed with success, how frequent it
recurs to application features and the quality of the
output. Finally, one should assess if the user enjoyed
and presented a positive attitude towards the system.
6 EXPECTED OUTCOME
So far, this PhD thesis have spawned the following
contributions:
A new taxonomy that associates each type of SSI
to a stage of the human speech production
model.
A state-of-the-art overview of SSIs, which
includes the latest related research.
SSI technologies and techniques applied for the
first time to EP (e.g. sEMG and UDS)
Results that indicate the difficulty on
distinguishing minimal pairs of words that only
differ on nasal sounds when using surface EMG
or Video.
Analysis of velum movement detection using
surface electrodes in the regions of the face and
neck and the best electrode location to do so.
A silent speech corpus that combines more than
two input data types and the first to
synchronously combine the corresponding
modalities.
Upon completion we expect to obtain the following
outcomes:
Development of a multimodal SSI prototype
based on Video, Depth, UDS, and sEMG where
eventually the weakest points of one modality
can be minored by other(s).
A careful analysis of what modalities to fuse,
when and how, in order to provide adequate
response to users’ goals and context, striving for
additional robustness in situations, such as noisy
environments, or where privacy issues and
existing disabilities might hinder single modality
interaction.
Assess the usability of the proposed system in
real-world scenarios.
REFERENCES
Beddor, P. S., 1993. The perception of nasal vowels. In M.
K. Huffman and R. A. Krakow, Nasals, Nasalization,
and the Velum, Phonetics and Phonology, Academic
Press Inc., Vol. 5, pp. 171-196.
Bell-Berti, F., 1976. An Electromyographic Study of
Velopharyngeal Function, Speech Journal of Speech
and Hearing Research, Vol.19, pp. 225-240.
Brumberg, J. S., Nieto-Castanonf, A., Kennedye, P. R. and
Guenther, F. H., 2010. Brain–computer interfaces for
speech communication. Speech Communication, Vol.
52, Issue 4, pp. 367-379.
Denby, B. and Stone, M., 2004. Speech synthesis from
real time ultrasound images of the tongue, Internat.
Conf. on Acoustics, Speech, and Signal Processing,
Montreal, Canada, Vol. 1, pp. I685–I688.
Denby, B., Schultz, T., Honda, K., Hueber, T., Gilbert,
J.M. and Brumberg, J.S, 2010. Silent speech
interfaces. Speech Communication, Vol. 52, Issue 4,
pp. 270-287.
Dias, M. S., Bastos, R., Fernandes, J., Tavares, J. and
Santos, P., 2009. Using Hand Gesture and Speech in a
Multimodal Augmented Reality Environment,
GW2007, LNAI 5085, pp.175-180.
Fagan, M. J., Ell, S. R., Gilbert, J. M., Sarrazin, E. and
Chapman, P.M, 2008. Development of a (silent)
speech recognition system for patients following
laryngectomy. Med. Eng. Phys., Vol. 30, Issue 4, pp.
419-425.
Ferreira, F., Almeida, N., Casimiro, J., Rosa, A. F.,
Oliveira, A., and Teixeira, A. 2013. Multimodal and
Adaptable Medication Assistant for the Elderly
CISTI'2013 (8th Iberian Conference on Information
Systems and Technologies).
Florescu, V-M., Crevier-Buchman, L., Denby, B., Hueber,
T., Colazo-Simon, A., Pillot-Loiseau, C., Roussel, P.,
Gendrot, C. and Quattrochi, S., 2010. Silent vs
Vocalized Articulation for a Portable Ultrasound-
Based Silent Speech Interface. Proceedings of
Interspeech 2010, Makuari, Japan.
Freitas, J. Teixeira, A. Dias M. S. and Bastos, C., 2011.
Towards a Multimodal Silent Speech Interface for
European Portuguese, Speech Technologies, Ivo Ipsic
(Ed.), InTech.
Freitas, J. Teixeira, A., Vaz, F. and Dias, M.S., 2012.
Automatic Speech Recognition based on Ultrasonic
Doppler Sensing for European Portuguese, Advances
in Speech and Language Technologies for Iberian
Languages, vol. CCIS 328, Springer.
Freitas, J., Calado, A., Barros, M. J. and Dias, M. S., 2009.
Spoken Language Interface for Mobile Devices.
Human Language Technology. Challenges of the
Information Society Lecture Notes in Computer
Science, Vol. 5603, pp. 24-35.
Freitas, J., Teixeira, A., Silva, S., Oliveira, C. and Dias,
M.S., 2014. Velum Movement Detection based on
Surface Electromyography for Speech Interface.
Conference on Bio-inspired Systems and Signal
Processing, Biosignals 2014, Angers, France.
SilentSpeechforHuman-ComputerInteraction
25

Fritzell, B., 1969. The velopharyngeal muscles in speech:
an electromyographic and cineradiographic study.
Acta Otolaryngolica. Suppl. 50.
Galatas, G., Potamianos, G., Makedon, F., 2012. Audio-
visual speech recognition incorporating facial depth
information captured by the Kinect. Proceedings of the
20th European Signal Processing Conference
(EUSIPCO), pp. 2714-2717.
Hardcastle, W. J., 1976. Physiology of Speech Production
- An Introduction for Speech Scientists. Academic
Press, London.
Herff, C. Janke, M. Wand, M. and Schultz, T., 2011.
Impact of Different Feedback Mechanisms in EMG-
based Speech Recognition. In Proceedings of
Interspeech 2011. Florence, Italy.
Kalgaonkar, K., Raj B., Hu., R., 2007. Ultrasonic doppler
for voice activity detection. IEEE Signal Processing
Letters, vol.14, Issue 10, pp. 754–757.
Kalgaonkar, K., Raj., B., 2008. Ultrasonic doppler sensor
for speaker recognition. Internat. Conf. on Acoustics,
Speech, and Signal Processing.
Kuehn D.P., Folkins JW, Cutting CB., 1982. Relationships
between muscle activity and velar position, Cleft
Palate Journal, Vol. 19, Issue 1, pp. 25-35.
Levelt. W., 1989. Speaking: from Intention to Articulation.
Cambridge, Mass.: MIT Press.
Lubker, J. F., 1968. An electromyographic-
cinefluorographic investigation of velar function
during normal speech production. Cleft Palate
Journal, Vol. 5, Issue 1, pp. 17.
Martins, P. Carbone, I. Pinto, A. Silva, A. and Teixeira,
A., 2008. European Portuguese MRI based speech
production studies. Speech Communication. NL:
Elsevier, Vol.50, No.11/12, ISSN 0167-6393, pp. 925–
952.
McGill, S., Juker, D. and Kropf, P., 1996. Appropriately
placed surface EMG electrodes reflect deep muscle
activity (psoas, quadratus lumborum, abdominal wall)
in the lumbar spine. In Journal of Biomechanics, Vol.
29 Issue, 11, pp. 1503-7.
Microsoft Kinect, Online: http://www.xbox.com/en-
US/kinect, accessed on 9 December 2013.
Patil, S. A. and Hansen, J. H. L., 2010. The physiological
microphone (PMIC): A competitive alternative for
speaker assessment in stress detection and speaker
verification. Speech Communication. Vol. 52, Issue 4,
pp. 327-340.
Pêra, V. Moura, A. and Freitas, D. 2004. LPFAV2: a new
multi-modal database for developing speech
recognition systems for an assistive technology
application. In SPECOM-2004, pp. 73-76.
Phang, C. W., Sutanto, J., Kankanhalli, A., Li, Y., Tan, B.
C. Y, and Teo, H. H., 2006. Senior citizens’
acceptance of information systems: A study in the
context of e-government services. IEEE Transactions
On. Engineering Management, Vol. 53, Issue 4, pp.
555–569, 2006.
Plux Wireless Biosignals, Portugal,
Online:
http://www.plux.info/, accessed on 9 December 2013.
Porbadnigk, A., Wester, M., Calliess, J. and Schultz, T.,
2009. EEG-based speech recognition impact of
temporal effects. International Conference on Bio-
inspired Systems and Signal Processing, Biosignals
2009, Porto, Portugal, pp.376–381.
Quatieri, T. F., D. Messing, K. Brady, W. B. Campbell, J.
P. Campbell, M. Brandstein, C. J. Weinstein, J. D.
Tardelli and P. D. Gatewood, 2006. Exploiting non-
acoustic sensors for speech enhancement. IEEE Trans.
Audio Speech Lang. Process, Vol. 14, Issue 2, pp.
533–544.
Rossato, S. Teixeira, A. and Ferreira, L., 2006. Les
Nasales du Portugais et du Français: une étude
comparative sur les données EMMA. In XXVI
Journées d'Études de la Parole. Dinard, France.
Sá, F. Afonso, P. Ferreira, R. and Pera, V., 2003.
Reconhecimento Automático de Fala Contínua em
Português Europeu Recorrendo a Streams Audio-
Visuais. In The Proceedings of COOPMEDIA'2003 -
Workshop de Sistemas de Informação Multimédia,
Cooperativos e Distribuídos, Porto, Portugal.
Schultz, T. and Wand, M., 2010. Modeling coarticulation
in large vocabulary EMG-based speech recognition.
Speech Communication, Vol. 52, Issue 4, pp. 341-353.
Seikel, J. A., King, D. W., Drumright, D. G., 2010.
Anatomy and Physiology for Speech, Language, and
Hearing, 4rd Ed., Delmar Learning.
Srinivasan, S., Raj, B. and Ezzat, T., 2010. Ultrasonic
sensing for robust speech recognition. Internat. Conf.
on Acoustics, Speech, and Signal Processing 2010.
Teixeira, A. and Vaz, F., 2000. Síntese Articulatória dos
Sons Nasais do Português. Anais do V Encontro para
o Processamento Computacional da Língua
Portuguesa Escrita e Falada (PROPOR), ICMC-USP,
Atibaia, São Paulo, Brasil, 2000, pp. 183-193.
Teixeira, A. and Vaz, F., 2001. European Portuguese
Nasal Vowels: An EMMA Study. 7th European
Conference on Speech Communication and
Technology, EuroSpeech – Scandinavia, pp. 1843-
1846.
Teixeira, A., Braga, D., Coelho, L., Fonseca, J.,
Alvarelhão, J., Martín, I., Queirós, A., Rocha, N.,
Calado, A. and Dias, M. S., 2009. Speech as the Basic
Interface for Assistive Technology. DSAI 2009 -
Proceedings of the 2th International Conference on
Software Development for Enhancing Accessibility
and Fighting Info-Exclusion, Porto Salvo, Portugal.
Teixeira, A., Martins, P., Oliveira, C., Ferreira, C., Silva,
A., Shosted, R., 2012. “Real-time MRI for Portuguese:
database, methods and applications”, Proceedings
of PROPOR 2012, LNCS vol. 7243. pp. 306-317.
Toda, T., Nakamura, K., Nagai, T., Kaino, T., Nakajima,
Y., and Shikano, K., Technologies for Processing
Body-Conducted Speech Detected with Non-Audible
Murmur Microphone. Proceedings of Interspeech
2009, Brighton, UK.
Toth, A. R., Kalgaonkar, K., Raj, B., Ezzat, T., 2010.
Synthesizing speech from Doppler signals, Internat.
Conference on Acoustics Speech and Signal
Processing
, pp.4638-4641.
BIOSTEC2014-DoctoralConsortium
26

Tran, V.-A Bailly, G. Loevenbruck, H. and Toda, T.,
2009. Multimodal HMM-based NAM to-speech
conversion. In Proceedings of Interspeech 2009,
Brighton, UK.
Wand, M. and Schultz, T., 2011. Analysis of Phone
Confusion in EMG-based Speech Recognition,
Internat. Conf. on Acoustics, Speech and Signal
Processing 2011, Prague, Czech Republic.
Wand, M. and Schultz, T., 2011. Investigations on
Speaking Mode Discrepancies in EMG-based Speech
Recognition, Proceedings of Interspeech 2011,
Florence, Italy.
Wand, M. and Schultz, T., 2011. Session-Independent
EMG-based Speech Recognition, International
Conference on Bio-inspired Systems and Signal
Processing, Biosignals 2011, Rome, Italy.
Yau, W. C., Arjunan, S. P. and Kumar, D. K., 2008.
Classification of voiceless speech using facial muscle
activity and vision based techniques, TENCON 2008-
2008 IEEE Region 10 Conference, 2008.
Zhu, B., 2008. Multimodal speech recognition with
ultrasonic sensors. Master’s thesis. Massachusetts
Institute of Technology, Cambridge, Massachusetts.
SilentSpeechforHuman-ComputerInteraction
27
