
Development and Evaluation of Human-Computer Interface based on
Facial Motor Unit Activity
Carlos M. M. Queiroz
1
, Slawomir J. Nasuto
2
and Adriano O. Andrade
1
1
Faculty of Electrical Engineering, Federal University of Uberlândia, Av. João Naves de Ávila, 2121, Uberlândia, Brazil
2
School of Systems Engineering, University of Reading, Reading, U.K.
1 STAGE OF THE RESEARCH
Interfaces that enable human-computer interaction
have progressed significantly. In the past decade a
lot of effort has been directed to the development
and improvement of perceptual interfaces, i.e.,
interfaces that promote interaction with the
computer without the use of conventional keyboard
or mouse. This type of interface combines the
understanding of natural human capabilities (e.g.,
communication, motor, cognitive and perceptual
skills) with the use of these for interaction with the
computer, taking into account the ways in which
people naturally interact with each other and with
the world. The search for more natural forms of
interaction has directed recent research for the study
of biological signals that have the potential to
encode control strategies adopted by the central
nervous system (CNS). In this context, information
obtained through the activity of motor units - such as
firing rate, waveform of action potentials and
recruitment strategy - can be used in the
development of human-computer interfaces.
Therefore, this research proposes in an
unprecedented manner, the development and
evaluation of a human-computer interface based on
information extracted from motor units (MUs). The
interface development will consist of two steps: i)
preparation of a flexible sensor array capable of
detecting activity of MUs of facial muscles; ii)
implementation of tools for signal processing
capable of extracting information from MUs and
translation of this information into control signals.
The evaluation of the interface will consider: i) the
quantification of learning related to the use of the
interface; ii) the analysis of the correlation between
learning and the dynamics of neural oscillation
obtained by means of electroencephalographic
signals; iii) the comparison of the new proposed
interface with the Muscle Academy (Andrade et al.,
2012), which is a myoelectric interface recently
developed by our research group. The current stage
of this study is described below.
1.1 The Choice of the Biosignal
Acquisition System
The experiments that will be carried out in this
research require the use of a large number of input
channels. Since we will be collecting simultaneous
information from EMG sensor array together with
brain activity (EEG) it was necessary to find
commercial equipment, flexible enough to deal with
particularities of distinct biosignals and also with the
requirement of a large number of channels.
a) b)
Figure 1: The designed box to accommodate the
acquisition system board. a) Front view with cover open;
b) Back view.
Based on the analysis of a number of available
commercial systems it was verified that the
RHD2000-series amplifier (Intan Technologies,
USA) would be suitable for the research. The main
features of this signal conditioner are: A/D converter
of 16 bits; support of up to 256 input channels
(configurable to distinct types of biopotential
according to their inherent characteristics);
possibility of sampling rates varying from 1 kS/s to
30 kS/s; and finally, customizable multi-platform
software based on the C++/Qt graphical user
interface. Figure 1 shows a box designed to
accommodate the printed circuit board and the
acquisition system and via connectors provide
access to some input and output signals (analog and
digital). Figure 2 shows an example of the main
screen of the graphical user interface during the
acquisition of several EMG signals.
47
M. Queiroz C., J. Nasuto S. and O. Andrade A..
Development and Evaluation of Human-Computer Interface based on Facial Motor Unit Activity.
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 2: Main screen shot of the graphic user interface
control software (Intan Technologies, USA).
1.2 EMG Sensor Array
The development of a human-computer interface
based on the activity of MUs requires sensors with
contact areas of adequate size to provide the
selectivity required to detect isolated action
potentials of MUs. However, this selectivity should
not require high accuracy in repositioning the sensor
near the MU of interest which would prevent
everyday usage of the interface for non-technical
people. Thus, taking into account these aspects, we
developed the sensor arrays in two shapes: circular
and concentric surface. This current design was
made on a rigid surface and it is illustrated in Figure
3.
a) b) c)
Figure 3: The three sensors array designed. a) Circular
sensor array (diameter of 2mm and distance between
electrodes (DE) of 4mm); b) Circular sensor array
(diameter of 3mm and DE of 4mm); c) Concentric sensor
array (internal diameter of 2mm, external diameter of 6m
and DE of 7mm).
To avoid the repositioning difficulties of
circulars arrays between usage sections, the pairs of
bipolar sensors (electrodes) in arrays were spatially
distributed in such way to facilitate the alignment of
at least one couple in the direction of the muscle
fibers. Figure 4 shows the two adopted forms of
distribution for bipolar channels. In both settings the
electrode pairs were oriented at 45° but with
different distances between electrodes.
Figure 4: Scheme of distributing the pair of electrodes
(bipolar) oriented every 45° with different distances
between electrodes. b) Short distance b) Large distance.
The capture of input signals of the proposed
human-computer interface is composed of three
arrays, one for the Frontal and two for the Temporal
muscles. To design this set of arrays, we explored
the fact that the conditioning circuit and the digital
converter are miniaturized, so it is possible to place
them closer to the detection region, aiming to
capture data with better signal to noise ratio. Figure
5a shows a set of sensor array and Figure 5b shows
its use by an individual. The signal conditioner and
digital converter circuit (1) and the connector (2) are
highlighted in the figure.
a) b)
Figure 5: a) Set of sensor arrays used to capture EMG
signals from facial muscles. b) Set of sensor arrays in use
by an individual. The signal conditioner and digital
converter circuit (1) and the connector (2) are highlighted.
2 OUTLINE OF OBJECTIVES
The general objective of this research is to develop
and evaluate a human-computer interface based on
facial motor unit activity.
The specific objectives to achieve this goal can
be divided into: i) develop and evaluate a flexible
1
2
BIOSTEC2014-DoctoralConsortium
48

array sensor fabricated by using silver ink,
composed of nano-silver particles of high purity,
developed by researchers at the Institute of
Chemistry, Federal University of Uberlândia; ii)
evaluate and implement techniques of
multidimensional signal processing capable of
mapping the MU activity of facial muscles in
commands necessary for human computer
interaction; and iii) evaluate the learning of a user
while a user employs the human-computer interface
activated by facial movements.
Figure 6: Human-computer interface based on
electromyography of facial muscles. Source: extracted
with permission from (Andrade et al., 2012).
3 RESEARCH PROBLEM
Recently, our group developed and evaluated a
human-computer interface (Andrade et al., 2012)
called Muscle Academy that allows complete
control of a computer cursor through the activation
of the frontal and temporal muscles.
The use of this interface has already been
evaluated by healthy individuals and people with
disabilities of upper limbs motor. Figure 6 presents a
basic schematic about how the sensors are
positioned on the facial muscles. The system
evaluation was performed by analysis of three
different protocols with progressive levels of
difficulty.
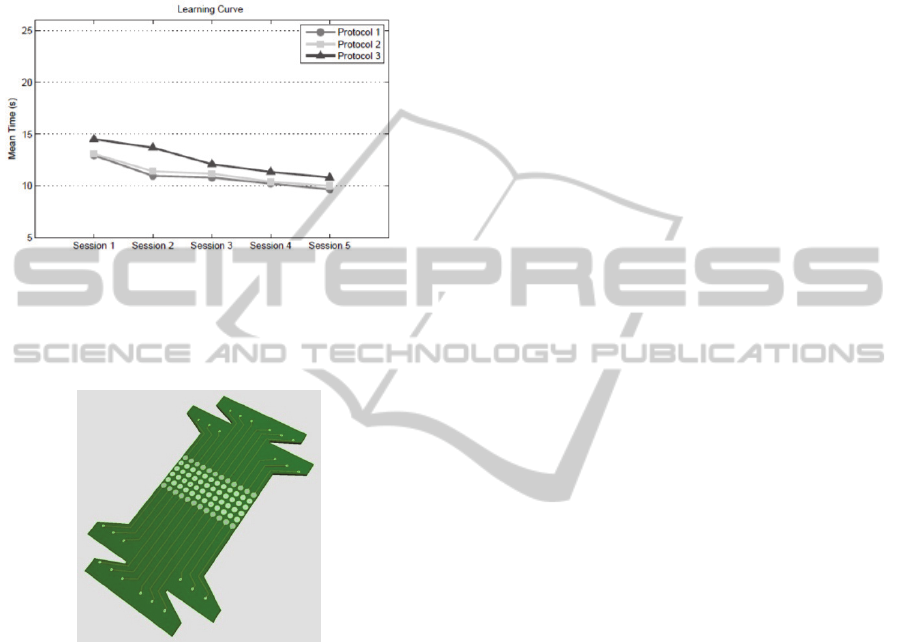
The evaluation results showed that there is a user
learning curve during the interface usage in five
different experimental sessions for all protocol types
(see Figure 7). However, there is a significant
discrepancy among the learning curve protocol 3
(with greater difficulty) and other protocols. This
reflects the difficulty of users access the smaller
objects in a computer interface, and also the
difficulty of fine motor control while performing this
task.
Figure 7: Results related to the learning to use the "Muscle
Academy". The mean time in seconds is the unit of
measure used to quantify the learning. Source: extracted
with permission from (Andrade et al., 2012).
Figure 8: Concentric sensor used in detection of Motor
Units Action Potentials developed by our research group
(Júnior, 2013).
Figure 9: Graphical interface illustrating sequences of
action potentials extracted in real time and translation of
them into commands (Júnior, 2013).
In order to solve this problem and allow the user
greater control interface, we developed a second
control strategy based on the detection of the activity
of MUs of only one facial muscle. For this purpose
we designed a concentric sensor (see Figure 8) able
to detect activities of MUs and a strategy to translate
this information in commands similar to those
reported in (Andrade et al., 2012). Examples of the
activity of MUs detected by the concentric sensor
are shown in Figure 9.
The results of the evaluation of this new
interface, illustrated in Figure 10, show that the
incremental learning over experimental sessions, and
that the discrepancy of learning is less among the
three protocols when compared to the results shown
DevelopmentandEvaluationofHuman-ComputerInterfacebasedonFacialMotorUnitActivity
49
in Figure 7. Thus, the problem of fine control
detected in Muscle Academy was largely solved.
However, from a practical standpoint, the use of this
interface is limited due to the great difficulty of
positioning of the sensor in the proximity of MUs of
interest.
Figure 10: Results concerning on learning of the use of the
system based on analysis of motor activity detected by
concentric electrode (Júnior, 2013). The mean time in
seconds is the unit of measure used to quantify the
learning.
Figure 11: Prototype of flexible sensor array for detection
of motor unit activity.
Given this context, the main purpose of this
research is to propose, implement and evaluate a
new control strategy based on processing of the
myoelectric activity from the facial MU detected by
sensor array (see an example of the prototype
flexible sensor array in Figure 11). It is expected that
whit this new control strategy, the sensor placement
problem is solved by expanding the contact area of
the sensor, and, also, that the learning on how to use
the interface is facilitated.
4 STATE OF THE ART
With the advancement of perceptual interfaces, i.e.
interfaces that promote interaction with the
computer without using keyboard or mouse
conventional, each time more research and
technologies have emerged in order to understand
the natural human capabilities (e.g., communication,
motor, cognitive and perceptual skills) and to
consider them in the process of human-computer
interaction (Oviatt and Cohen, 2000).
The use of perceptual interfaces is of particular
interest, but not limited to the field of rehabilitation
and assistive technology. Patients suffering motor or
cognitive limitations can benefit by the use of this
technology to facilitate and encourage interaction
with the environment and especially with computers.
Such interaction is each more present in our lives,
for example, television sets and video games can
now be controlled by body movements.
Currently there are many strategies that can be
used to obtain user information from a perceptive
interface. The basic idea is to convert information
from user input into commands that can be
interpreted by an application (Oviatt and Cohen,
2000); (Turk and Robertson, 2000).
The strategies can be broadly divided into the
following categories with respect to the type of
sensor used for the detection of the input signal
(Higginbotham et al., 2007): (i) pressure / touch
(Bourhis et al., 2002), (ii) motion and gesture
recognition (Javanovic and MacKenzie, 2010), (iii)
speech recognition (Majewski and Kacalak, 2006)
and (iv) biopotentials (Chin et al., 2008).
The main motivation for using biopotentials is,
unlike on-off approaches, the possibility to obtain a
more natural and proportional control of the human-
computer interface (Higginbotham et al., 2007);
(Ahsan et al., 2009). An evaluation of review studies
(Andrade et al., 2011); (Tai et al., 2008) that have
been published recently about the applications of
different types of biopotentials (e.g.,
electroencephalogram, electromyogram, electro-
oculogram) in human-computer interaction suggests
that the use of electromyographic (EMG) is probably
the most common and the reason may be the great
success of the use of this signals acting as the input
informations of interfaces that control prosthetic
devices (Englehart et al., 2001); (Hargrove et al.,
2007); (Huang et al., 2005); (Jiang et al., 2009).
5 METHODOLOGY
For the development and evaluation of human-
computer interface is proposed an experimental
scheme with appropriate resources to enable the use
of the interface by two distinct groups and the
BIOSTEC2014-DoctoralConsortium
50

recording of data from central and peripheral
nervous system.
5.1 Definition of Experimental Groups
and Criteria for Inclusion and
Exclusion
In total, 20 individuals of both genders, from
different ages groups, divided into two groups, will
be recruited to participate in the experiments
proposed in this research.
Experimental group 1 (G1): it will be composed
of 10 healthy subjects (i.e. without disabilities in
upper limbs), of both genders, aged over 18 years.
Experimental group 2 (G2): it is composed of
individuals over 18 years, both genders, with motor
disorders of the upper limbs (i.e. paralysis,
amputations, congenital malformations, changes in
motoneuron) that prevents the individual to move
the mouse with his hands. Individuals should not
present neurological disorders which disturb the
concentration or physical limitation that prevents the
contraction of the muscles Temporal and Frontal.
Subjects who are unable to perform the contraction
of these muscles will be excluded from the
experimental group.
The subjects of the experimental group G1 will
be recruited randomly in the population, whereas
subjects in the experimental group G2 will be
recruited in institutions that serve people with
neuromotor disabilities. All individuals participate
voluntarily in this study. The procedures of this
research will be previously explained to the subjects
for their full awareness about what will be
accomplished. Each individual and/or his legally
responsible will fill in and sign an Informed Consent
Form proving that will be aware about the protocols
and research, and also, that agrees to perform the
experiment, without receiving any charge for
participation. The confidentiality and personal
information of research participants will be
maintained.
5.2 Definition of Training Protocols
and Data Collection
The training protocol and evaluation of human-
computer interface of this research is similar to that
used in the evaluation of the Muscle Academy
(Andrade et al., 2012). The main difference is that
this protocol will include the recording of brain
activity (electroencephalogram detected as standard
10-20) simultaneously to the MU activity (detected
by arrays of flexible sensors, placed on facial
muscles) in order to provide a more detailed
evaluation of the learning process due to the use of
the interface. This type of analysis will be performed
off-line and it is detailed in the next section.
The system evaluation will be performed in
acclimatized room, with only the presence of the
evaluator and the subject (with the accompanying, if
necessary) and equipment to carry out the research.
This study is divided into three protocols varying
the size of the buttons to be clicked according to
each protocol (Protocol 1, buttons 2 cm x 2 cm,
Protocol 2 buttons 1 cm x 1 cm and protocol 3,
buttons 0.5 cm x 0.5 cm), and each button has a
different colour (GREEN, YELLOW, RED and
BLUE) being arranged in a cross shape (Figure 12).
Figure 12: Interface of experimental protocols with
different difficulty levels. Source: (Andrade et al., 2012).
The distance between the centers of the buttons
in the 3 protocols is constant, and its area varies
from one protocol to another, thereby increasing the
difficulty as decreases the area of the buttons.
The goal of this interface is to allow the subject
to control the cursor, and so, the learning can be
quantified, considering the time taken to perform the
specific tasks as a good parameter to measure
learning progress. The following tasks will be
requested to the subjects:
1. Clockwise: move the cursor to the green button
and click, move the cursor to the yellow button
and click, move the cursor to the red button and
click, move the cursor to the blue button and
click, and finally move the cursor to the green
button and click;
2. Counterclockwise: move the cursor to the green
button and click, move the cursor to the blue
button and click, move the cursor to the red
button and click, move the cursor to the yellow
button and click, and finally move the cursor to
the green button and click;
Figure 13 shows a schematic which includes the
main elements involved in data collecting where
muscle and brain activities are simultaneously
recorded and stored on a workstation with high
performance for offline analysis. The standard 10-20
DevelopmentandEvaluationofHuman-ComputerInterfacebasedonFacialMotorUnitActivity
51
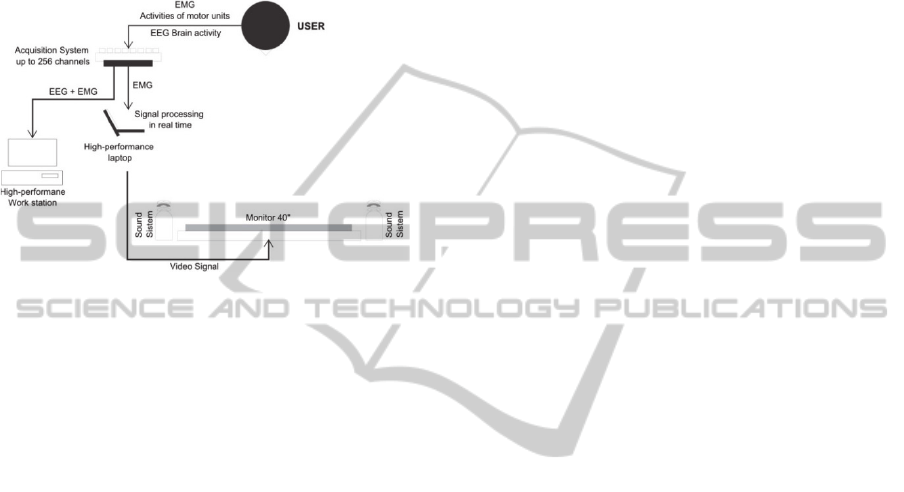
will be used for the positioning of EEG sensors. The
MU activity, detected by sensor arrays on facial
muscles, is converted in real time by software
available in a high-performance laptop in commands
that enable the control of a cursor for interacting
with the graphical interface shown in Figure 12. The
user will receive continuous feedback audible and
visual interaction.
Figure 13: Main components involved in data collection
and analysis.
5.3 Analysis of Learning through the
Record of Muscle and Brain
Activities
During the interaction with the graphical interface,
shown in Figure 12, the activities of the MUs and
brain (EEG) will be recorded simultaneously. The
purpose of this registry is to perform offline analysis
in order to understand the correlation between motor
learning and brain dynamics, arising from the use of
the interface. This analysis will enable the
development of alternative indices that can quantify
and characterize learning in human computer
interaction. These indices will be confronted with
the traditional for the measurement of runtimes tasks
illustrated in Figures 7 and 10.
The analysis of the correlation between muscle,
brain and learning activities will be studied using the
technique of signal processing PLS (Partial Least
Squares), which is a multivariate statistical tool
widely used in studies with the aim of verifying
correlations between brain activity and behaviour
(Martı
́
nez-Montes et al., 2004, Krishnan et al.,
2011).
6 EXPECTED OUTCOME
Considering the main objective of this doctoral work
is to develop and evaluate a human-computer
interface based on MU activity of the facial muscles
and taking into account the methodology adopted, it
is expected to achieve some goals.
A first expected practical outcome is the
development of a flexible sensor array based on an
ink composed of nanoparticles of pure silver capable
of detecting biopotentials which has numerous
applications in rehabilitation, neurology, assistive
technology, and others. This type of technology can
integrate tools used in the assessment of the
neuromuscular system, for the purpose of diagnosing
diseases that affect nerves and muscles. The great
advantage of using this technology is its low cost
and ease of application. This approach eliminates the
usage of sophisticated and expensive technologies to
silver deposit on surfaces and allows the sensors
production with different shapes so adapting to
various muscles.
Once we have the right conditions to capture the
desired biopotentials, another important achievement
is to obtain a computer program which implements a
human-computer interface capable of interpreting
the MU activity. When compared to other existing
technologies, it is expected that this enables the user
to more precise control of the interface through the
more subtle and natural movements, and thus reduce
the incidence of muscle fatigue and discomfort to
the user. Whereas the developed interface is
independent of the system or device to be controlled,
then the same has applications in games (serious
games) used for rehabilitation purposes, control
environments (e.g., smart homes), automated
wheelchairs, bioefeedback systems to control stress
or emotions.
Finally, because of the need to evaluate the
interface developed, it is expected the development
of a neuromotor learning index capable of
quantifying and evaluating the learning of
individuals using the human-computer interface. The
main innovation of this index is take into account
components of the central nervous system (brain -
EEG) and peripheral (muscle - EMG), and not only
the user´s response time. From a practical
perspective, this index can be used to measure the
contribution level of the central and peripheral
nervous system on learning. Furthermore, it can be
used for assessment of human-computer interface,
because this index can help diagnose of learning
disabilities that do not have standardized tests.
ACKNOWLEDGEMENTS
The authors would like to thank the financial support
BIOSTEC2014-DoctoralConsortium
52

of the Brazilian government through the following
agencies: CAPES (Coordination for the
Improvement of Higher Level Personnel), CNPq
(National Council for Research and Development)
and FAPEMIG (Research Support Foundation of
Minas Gerais), IFTM (Federal Institute of Triângulo
Mineiro).
REFERENCES
Ahsan, M. R., Ibrahimy, M. I. & Khalifa, O. O. 2009. Emg
Signal Classification For Human Computer
Interaction: A Review. European Journal Of Scientific
Research, 33, 480-501.
Andrade, A. O., Bourhis, G., Losson, E., Naves, E. L. M.,
Pinheiro, C. G., Jr. & Pino, P. 2011. Alternative
Communication Systems For People With Severe
Motor Disabilities: A Survey. Biomedical Engineering
Online, 10, 31.
Andrade, A. O., Pereira, A. A. & Kyberd, P. J. 2012.
Mouse Emulation Based On Facial Electromyogram.
Biomedical Signal Processing And Control.
Bourhis, G., Pino, P. & Leal-Olmedo, A. Communication
Devices For Persons With Motor Disabilities: Human-
Machine Interaction Modeling. Systems, Man And
Cybernetics, 2002 Ieee International Conference On,
2002. Ieee, 6 Pp. Vol. 3.
Chin, C. A., Barreto, A., Cremades, J. G. & Adjouadi, M.
2008. Integrated Electromyogram And Eye-Gaze
Tracking Cursor Control System For Computer Users
With Motor Disabilities. Journal Of Rehabilitation
Research And Development, 45, 161.
Englehart, K., Hudgin, B. & Parker, P. A. 2001. A
Wavelet-Based Continuous Classification Scheme For
Multifunction Myoelectric Control. Biomedical
Engineering, Ieee Transactions On, 48, 302-311.
Hargrove, L. J., Englehart, K. & Hudgins, B. 2007. A
Comparison Of Surface And Intramuscular
Myoelectric Signal Classification. Biomedical
Engineering, Ieee Transactions On, 54, 847-853.
Higginbotham, D. J., Shane, H., Russell, S. & Caves, K.
2007. Access To Aac: Present, Past, And Future.
Augmentative And Alternative Communication, 23,
243-257.
Huang, Y., Englehart, K. B., Hudgins, B. & Chan, A. D.
2005. A Gaussian Mixture Model Based Classification
Scheme For Myoelectric Control Of Powered Upper
Limb Prostheses. Biomedical Engineering, Ieee
Transactions On, 52, 1801-1811.
Javanovic, R. & Mackenzie, I. S. 2010. Markermouse:
Mouse Cursor Control Using A Head-Mounted
Marker. Computers Helping People With Special
Needs. Springer.
Jiang, N., Englehart, K. B. & Parker, P. A. 2009.
Extracting Simultaneous And Proportional Neural
Control Information For Multiple-Dof Prostheses
From The Surface Electromyographic Signal.
Biomedical Engineering, Ieee Transactions On, 56,
1070-1080.
Júnior, C. G. P. 2013. Assistive Technology For The
Severe Motor Impaired By Using Online Processing
Of Motor Unit Action Potentials Of Facial Muscles.
Phd Phd Thesis, Federal University Of Uberlândia.
Krishnan, A., Williams, L. J., Mcintosh, A. R. & Abdi, H.
2011. Partial Least Squares (Pls) Methods For
Neuroimaging: A Tutorial And Review. Neuroimage,
56, 455-475.
Majewski, M. & Kacalak, W. 2006. Natural Language
Human-Machine Interface Using Artificial Neural
Networks. Advances In Neural Networks-Isnn 2006.
Springer.
Martínez-Montes, E., Valdés-Sosa, P. A., Miwakeichi, F.,
Goldman, R. I. & Cohen, M. S. 2004. Concurrent
Eeg/Fmri Analysis By Multiway Partial Least Squares.
Neuroimage, 22, 1023-1034.
Oviatt, S. & Cohen, P. 2000. Perceptual User Interfaces:
Multimodal Interfaces That Process What Comes
Naturally. Commun. Acm, 43, 45-53.
Tai, K., Blain, S. & Chau, T. 2008. A Review Of
Emerging Access Technologies For Individuals With
Severe Motor Impairments. Assistive Technology, 20,
204-221.
Turk, M. & Robertson, G. 2000. Perceptual User
Interfaces. Communications Of The Acm, 43.
DevelopmentandEvaluationofHuman-ComputerInterfacebasedonFacialMotorUnitActivity
53
