
PIPSS
A Portable Instrument Postural Stability System
to Assess Dynamic Postural Stability
Michael Korostelev
1
, Li Bai
1
, Assaf Zoor
2
and Carole A. Tucker
1,2
1
Department of Electrical and Computer Engineering, Temple University, Philadelphia PA, U.S.A
2
Department of Physical Therapy, Temple University, Philadelphia PA, U.S.A.
Keywords: Balance Testing, Gaming Console, Portable Instrumentation.
Abstract: The most common method to assess postural stability involves the use of a force plate to measure changes
in center of pressure (COP)(Duarte et al 2010). The high cost of this technology limits practicality and
accessibility for widespread use outside of major clinical centers. There is an emerging trend toward video
game use as a means of increasing patient engagement in rehabilitation interventions. This trend is primarily
driven by the newest generation of consumer console systems which use motion-based controls (e.g.
Nintendo Wii and WiiFit). We have developed and tested PIPSS, a system that utilizes the Nintendo Wii
balance board to quantify COP during simple static and more complex dynamic balance tasks. This low
cost, accessible postural stability assessment system could be easily deployed in clinics, sport and athletic
centers, training rooms, schools or elderly care facilities to provide a quantitative metric of postural control.
Such information would allow for more timely assessment and intervention, improved return to play
guidelines in athletes, or balance and fall interventions in care centers for the elderly. Current work includes
analyses and interpretation of the PIPSS testing protocols with
existing balance measures in children
and adults with Cerebral Palsy, and concussion.
1 INTRODUCTION
The widespread use and societal acceptance of video
games within households, clinics, care and
rehabilitation centers, provides an exceptional
opportunity to quantitatively assess and monitor
balance training programs on a daily basis. The
capability to provide patient-specific therapeutic
programs using such devices, and simultaneous data
collection from these devices, supports efforts in
tele-rehabilitation. The ability to monitor clients at
home, obtaining frequent objective measures as well
as updating the intervention programs over the
internet extends the potential to provide such health
care services within a variety of settings.
In the past decade, there has been a recent focus
of attention towards concussion management in
athletes. The impact of concussion on health status
relies on a multifactorial approach that include self-
reported symptoms, neurocognition, and postural
control. Self-reported symptoms are typically
unreliable due to under-reporting and neurocognitive
testing has demonstrated good reliability. The most
effective and most common method to assess
postural stability involves the use of a force plate to
measure changes in center of pressure (COP)
(Duarte et al, 2010). The high cost of this
technology limits practicality and accessibility for
clinicians. A low technology alternative that is
commonly used to assess postural stability is the
Balance Error Scoring System (BESS). Although
the BESS test is commonly and easily used by
clinicians, it exhibits only moderate reliability
(Finoff 2009, Bell 2011) with a lack of normative
data to assess minimal detectable changes within the
population to determine indication of return to play.
1.1 Background
TheraWii was a software application developed as
an Engineering Senior Design Project at Drexel
University during the 2008-2009 academic year.
TheraWii can generate quantitative balance and
reaching assessments and interventions using the
Wii balance board, hand controllers, and a laptop
computer. In addition to the TheraWii software,
312
Korostelev M., Bai L., Zoor A. and A. Tucker C..
PIPSS - A Portable Instrument Postural Stability System to Assess Dynamic Postural Stability.
DOI: 10.5220/0004934703120315
In Proceedings of the International Conference on Biomedical Electronics and Devices (TPDULL-2014), pages 312-315
ISBN: 978-989-758-013-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Excel and blue tooth capability on the laptop are the
primary requirements for data collection. TheraWii
software incldued a set of generic balance activities
that can be linked together to form balance or
reaching assessments or interventions. Patient- and
session-specific data, as well as the balance and
acceleration signals from the Wii devices during
sessions, were exported using Bluetooth technology
to a data file that could be analyzed and used to
quantify posture and movement. The software was
designed to record and display models of physical
motion using the Wii Remote and Balance Board
motion capturing interfaces as input.
The Portable Instrumented Postural Stability
System (PIPSS) extends the original TheraWii
project with enhanced testing and training protocols
as well as a web-based interface.
1.2 Clinical Significance
PIPSS provides the technology of a force plate with
a mass-produced, low cost device that demonstrates
good validity and reliability in assessing postural
stability via COP measures (Clark et al). TheraWii
can provide quantitative measures of balance and
acceleration in a software platform that is
economical, easily accessible for home and clinic
use. TheraWii is open-source software released
under the GNU General Public License Version 3
(GPLv3), and the copyright is retained by the
original TheraWii project personnel. A detailed
software guide, project description and User manual
are available, and the intention is to provide the
TheraWii system as an open-source platform for
clinical, non-profit applications. The use of
TheraWii as an objective measure that can be used
to objectively capture in movement and posture
outside of a laboratory environment on a frequent
basis is unparalleled, particularly coupled with
existing videogame technology.
2 METHODS
2.1 Subjects
The data from a sample of convenience of ten
participants (6 female, height=162.3cm±17.0,
weight=67.8kg±23.6, leg length=86.2cm±5.4, ages
25±2.5 collected as part of a study are used to
demonstrate the PIPSS as a dynamic balance
measure for this report. All subjects had no history
of concussion or neuromusculoskeletal issues within
6 months of testing.
2.1.2 Procedures
All subjects completed the BESS test and the
Random Positioning Test on the PIPSS as well as
clinical measures of postural stability. The BESS
was performed on the TheraWii balance board to
ensure coincident COP and BESS scores for each
condition. The BESS consists of 6 conditions
performed for 20sec with eyes closed: 1) double leg
standing, 2) non-dominant single leg standing, 3)
tandem stance, 4) double leg standing on foam
(AIREX Balance Pad Elite, Power Systems Inc,
Knoxville, TN), 5) non-dominant single leg standing
on foam, and 6) tandem standing on foam (4). The
investigator scored the BESS based on the following
criteria: 1) moving hands off iliac crests, 2) opening
the eyes, a step, 3) stumble or fall, 4) abduction or
flexion of the hip beyond 30 degrees, 5) lifting the
forefoot or heel off the testing surface or 6)
remaining out of the testing position for greater than
five seconds. Each error counted as 1 point with a
maximum score of 10 points per condition. Anterior-
Posterior (A-P) and medial-lateral (M-L) COP data
was acquired at 30Hz from the Wii balance board.
Custom Matlab programs were written to analyze
the data. COP was averaged across A-P and M-L
values and log transformed for the purpose of this
report
The Random Positioning Test is a test where
subjects stand barefoot (standardized foot position)
and look straight ahead at a screen on which a red
dot representing their real-time COP is visible. A
target shape appears on the screen in a random
position (position specifications controlled by the
software) and the subjects are instructed to move
their COP within the target and maintain it there for
2 seconds. After 2 seconds in the target, the target
moves to a new random position, and the subject
again moves as fast as possible to that target. This
process is repeated for a total of 10 random target
positions. Hence the total trail length varies
depending on how fast and accurate the individual is
in moving to the target and remaining in the target.
Though many performance metrics are available in
the PIPSS software, for the purposes of this report
we have focused only on the COP trajectory and
average path efficiency.
3 RESULTS
Quantitative measures for each BESS score showed
appropriate directionality (Table 1) with a BESS
score of 1 having a mean COP path efficiency of
PIPSS-APortableInstrumentPosturalStabilitySystemtoAssessDynamicPosturalStability
313
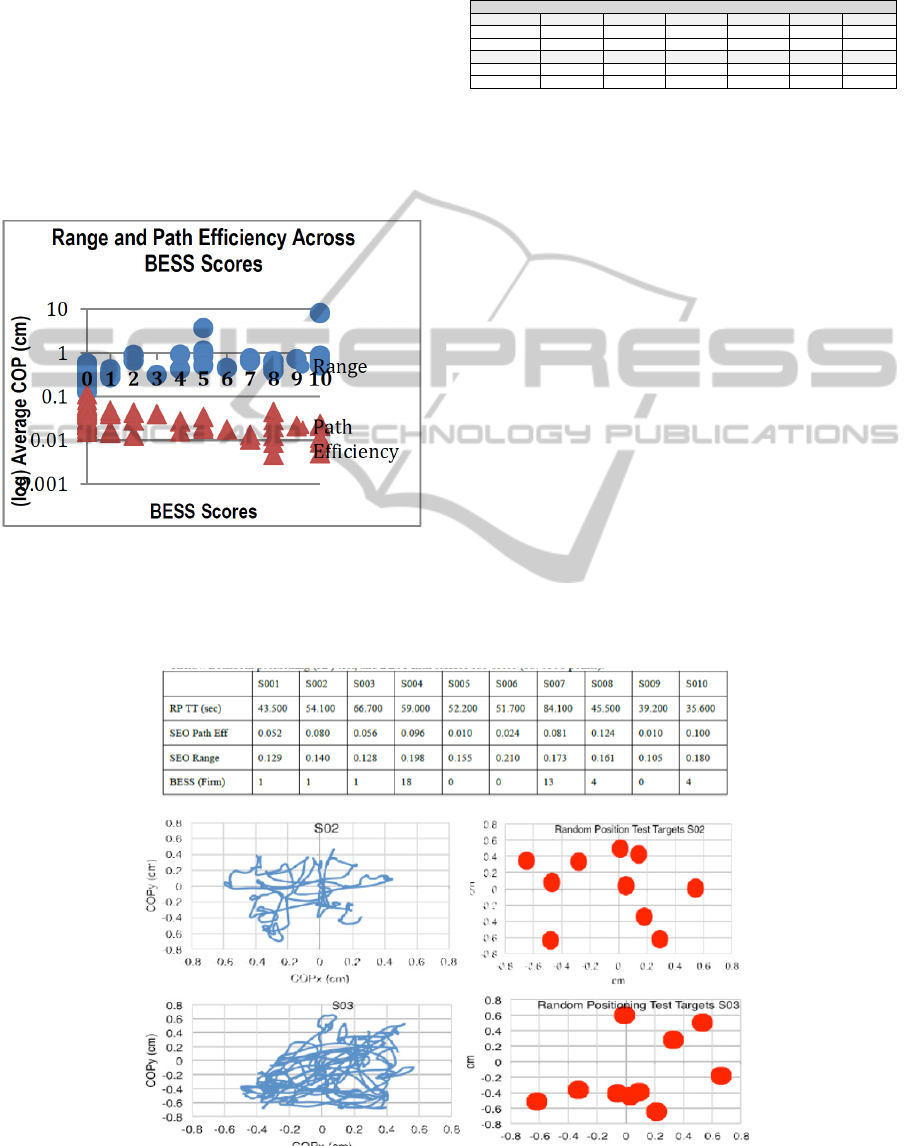
.04cm±.02 and a BESS score of 10 having a mean
COP path efficiency of .01cm±.01. Average COP
range and path efficiency for each BESS score had
overlapping ranges across scores (Figure 1). A score
of zero on the BESS varied in average COP from
0.13 to 0.58cm for range with path efficiency spread
from 0.016 to 0.11cm. A BESS score of five also
had high variation for range (0.51-3.7cm) where a
BESS score of eight had a high path efficiency
variation (0.01-0.44cm). The BESS score of ten had
the highest variation in both range and path
efficiency (0.51-8.1cm, 0.01-0.02cm), respectively.
Figure 1: BESS COP measures of range and path
efficiency.
Table 1: Range and Path Efficiency Across BESS Scores,
mean (SD). BESS Scores represent the min and max
values awarded for each condition.
BESS Scores
Condition 0 1 2 3 4
Range
.32(.13) .33(.06) .80(.13) .31(.) .67(.35)
Path
.04(.02) .03(.02) .03(.02) .04(.) .02(.01)
Condition 5 6 7 8 9 10
Range
1.3(1.45) .45(.) .70(.07) .51(.11) .72(.) 1.9(3.0)
Path
.02(.01) .02(.) .01(.01) .02(.01) .02(.) .01(.01)
The PIPSS random positioning test was completed
by all subjects with an average time for completion
of 32.2+14.3 (range 35.6 – 84.1 seconds). Examples
of 2 COP relative to target positions are displayed in
Figures 1 & 2. of (range for simply.
4 DISCUSSION
PIPSS can be used simply as an input device that
quantifies COP during simple static balance tasks, but
more importantly as demonstrated in this report, can be
used to implement dynamic postural tasks. This low cost,
accessible postural stability assessment system could be
easily deployed on clinics, sport and athletic centers,
training rooms, schools or elderly care facilities to provide
a quantitative metric of postural control. Such information
would allow for more timely assessment and intervention,
improved return to play guidelines in athletes, or balance
and fall interventions in care centers for the elderly.
Current work includes analyses and interpretation of the
PIPSS testing protocols with existing balance measures
Table 2: Center of Pressure (COP) variables during standing eyes open (SEO) baseline trial, Total Time (TT) on the random
positioning (RP) test, and BESS firm surface sub-score (out of 30 points).
Figure 2: Of the COP and target positions for 2 exemplar subject performing the PIPSS random positioning test.
BIODEVICES2014-InternationalConferenceonBiomedicalElectronicsandDevices
314

and improved definition to the relevant PIPSS output
variable that are more sensitive to changes in
postural control.
5 CONCLUSIONS
The PIPSS provides a portable, instrumented system
that captures center of pressure like data that can be
used to provide improved quantification of balance
and postural stability during quiet and dynamic
standing tests. We are currently continuing our
validation of the PIPSS measures in children and
adults in a variety of conditions including typically
developing, individuals post-concussion, and
individuals with cerebral palsy.
Our current technological work is focused on the
integration of a software design pattern for this new
style of PIPSS with Model-View-Controller (MVC)
pattern at its core. In order to facilitate
interoperability and further system extension a
component based MVC should be implemented
where raw server API is abstracted and the
gathering, validation and conversion of parameters
for data models should be made easy and server
based.
The emerging concept of the Internet of Things
provides a foundation for this relationship with some
advanced telemetry methodologies. Until recently,
connection of edges of networks has been
problematic, particularly if devices are limited in
their computation power. The Message
QueuingTelemetry Transport protocol alleviates
many issues with remote telemetry. With it’s
publish/subscribe pattern, it is a great candidate for
the PIPSS application. We will create a centralized
entry point for PIPSS telemetry and simple hardware
drivers for computing and mobile devices that will
enable device level MQTT communication with the
MVC architecture. A standard API along with
MQTT will enable further development of drivers
for other diagnostic devices to seamlessly enter this
ecosystem and support the collection of data. This
idea of an openly available API facilitates
dissemination of results as well as broadly impacting
the field and enable clinicians to make the steps
needed for standardizing return-to-sport criteria
through collaborative data collection and analytics
ACKNOWLEDGEMENTS
The authors would like to thank the original
TheraWii software developers from Drexel
University: Dr David Breen, Timothy Chagnon,, Joe
Kokinda, Andrew Meinert and Don Naegel.
REFERENCES
Bell, D. et al. (2011) Sports Health, 3(3): 287-295.
Clark, R et al. (2010) Gait and Posture, 31:207-310.
Duarte, M et al. (2010) Rev Bras Fisoter, 14(3):183-192.
2. 3.
Finoff, J. et al (2009) Physical Medicine and
Rehabilitation, 1(1):50-54.
Iverson, G. et al (2008) Brain Injury, 22(2):147-152.
PIPSS-APortableInstrumentPosturalStabilitySystemtoAssessDynamicPosturalStability
315
