
Braille Vision Using Braille Display and Bio-inspired Camera
Roman Graf, Ross King and Ahmed Nabil Belbachir
AIT Austrian Institute of Technology, Vienna, Austria
Keywords:
Disabled Users, Braille Display, Bio-inspired Camera, Computer Vision, Image Processing.
Abstract:
This paper presents a system for Braille learning support using real-time panoramic views generated from the
novel smart panorama camera 360SCAN. The system makes use of the modern image processing libraries and
state-of-the-art features extraction and clustering methods. We compare the real-time frames recorded by the
bio-inspired camera to the reference images in order to determine particular figures. One contribution of the
proposed method is that image edges can be transformed to the presentation on Braille display directly without
any image processing. It is possible due to the bio-inspired construction of camera sensor. Another contri-
bution is that our approach provides Braille users with images recorded from natural scenes. We conducted
several experiments that verify the methods that demonstrate learning figures captured by the smart camera.
Our goal is to process such images and present them on the Braille Display in a form appropriate for visually
impaired people. All evaluations were performed in the natural environment with ambient illumination of 200
lux, which demonstrates high camera reliability in difficult light conditions. The system can be optimized by
applying additional filters and features algorithms and by decreasing the rotational speed of the camera. The
presented Braille learning support system is a building block for a rich and qualitative educational system for
the efficient information transfer focused on visually impaired people.
1 INTRODUCTION
Though visually impaired people have quite good de-
veloped computer interfaces for Braille code(Jim´enez
et al., 2009) they have very limited access to im-
age information. Smart cameras provide application-
specific information out of a raw image or video
stream. Real-time smart camera operation areas can
be extended for Braille education task. Until now,rea-
soning has not been applied to smart camera output.
Currently the verification and analysis of camera out-
put are usually carried out manually and are not used
for further analysis or processing. The rich informa-
tion from images is not evaluated and there are no au-
tomated methods to estimate the content of current
natural scene, to detect objects observed during cam-
era use, or to validate the camera output. There is a
need for digital preservation methods to handle such
information and make it useful for visually impaired
people.
In this work, we described a system for the au-
tomated Braille educational support with a specific
smart camera (the AIT 360SCAN presented in Fig-
ure 1) that could be used to enhance the accessibility
to graphical information for visually impaired peo-
ple and efficiency of its understanding and process-
Figure 1: The bio-inspired panoramic smart camera
360SCAN.
214
Graf R., King R. and Belbachir A..
Braille Vision Using Braille Display and Bio-inspired Camera.
DOI: 10.5220/0004949302140219
In Proceedings of the 6th International Conference on Computer Supported Education (CSEDU-2014), pages 214-219
ISBN: 978-989-758-022-2
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

ing. The paper (Belbachir et al., 2012) provides a de-
tailed description of the newly designed smart cam-
era 360SCAN for real-time panoramic views. The
main contribution described in this paper is a real-
time image analysis approach focused on needs of vi-
sually impaired people with algorithms that provide
automatic information extraction and support meth-
ods for graphical information processing and presen-
tation. In order to implement image processing for
natural scenes we apply duplicate detection and ob-
ject recognition to recorded images of smart camera
output. For example, our system carries out an initial
image processing by object detection and searching
for duplicates against a set of reference images like
triangle or circle before making presentation of the
detected form in a Braille appropriate format using
dot matrix.
The paper is structured as follows: The next sec-
tion gives an overview of related work and concepts.
In the third section we describe the Braille education
system conceptsand our algorithmexposed in a work-
flow. In the fourth section experimental setup and
evaluation results are presented. In the last section
concluding remarks and the outlook on planned fu-
ture work is given.
2 RELATED WORK
Educational devices for Braille users currently are
limited by several Braille displays due to very high
price of Braille display. One of the graphical
Braille displays that is in production is described in
(Matschulat, 1999). The display area consists of a
matrix 16 to 16 dots with 1mm distance between tax-
els. The advantage of this piezoelectric VideoTIM3
device is its high speed (24 frames per second), strong
stroke, robustness and ability to demonstrate different
shapes even if its resolution is not very high. The de-
vice consists of a hand-held conventional video cam-
era and the main unit with the tactile display. But
this technology is focused on document reading with
your fingers and is not appropriate for another kind
of images like natural scenes. This device is pretty
large, heavy and expensive and such technique re-
quires training.
In HyperBraille project was developed a graphics-
enabled display for blind computer users (Prescher
et al., 2010), (Erp et al., 2010). This display is de-
signed to increase the amount of information perciev-
able to blind computer user through both hands and
enables graphical information to them. Besides high
cost of this device it requires development of special
software and focuses of standard Office and Internet
Figure 2: A workflow for object detection from recorded
image.
applications.
The developers (Zeng and Weber, 2011), (Zeng
and Weber, 2010) of project Tangram make use of
HyperBraille device for graphical presentations. They
developed education concepts and standardised docu-
ment formats and use device extended by audio in-
formation. Therefore the main focus of their research
is in creation of standards, educational concepts and
software for existing device.
The advantage of our approach is that images from
natural scenes are produced by a similar to human eye
low cost smart camera with low data rate and high
dynamic range. The output of this camera can be di-
rectly presented by the small Braille module in form
of dot matrix but also can be processed, analysed (see
Figure 2) an presented as required by Braille user.
A number of approaches deal with object detec-
tion from images and video. Many of these ap-
proaches are limited to text detection. For example,
the efficient algorithm proposed in (Epshtein et al.,
2010) uses the idea of detecting the width of char-
acter strokes. This method is very efficient for text
BrailleVisionUsingBrailleDisplayandBio-inspiredCamera
215
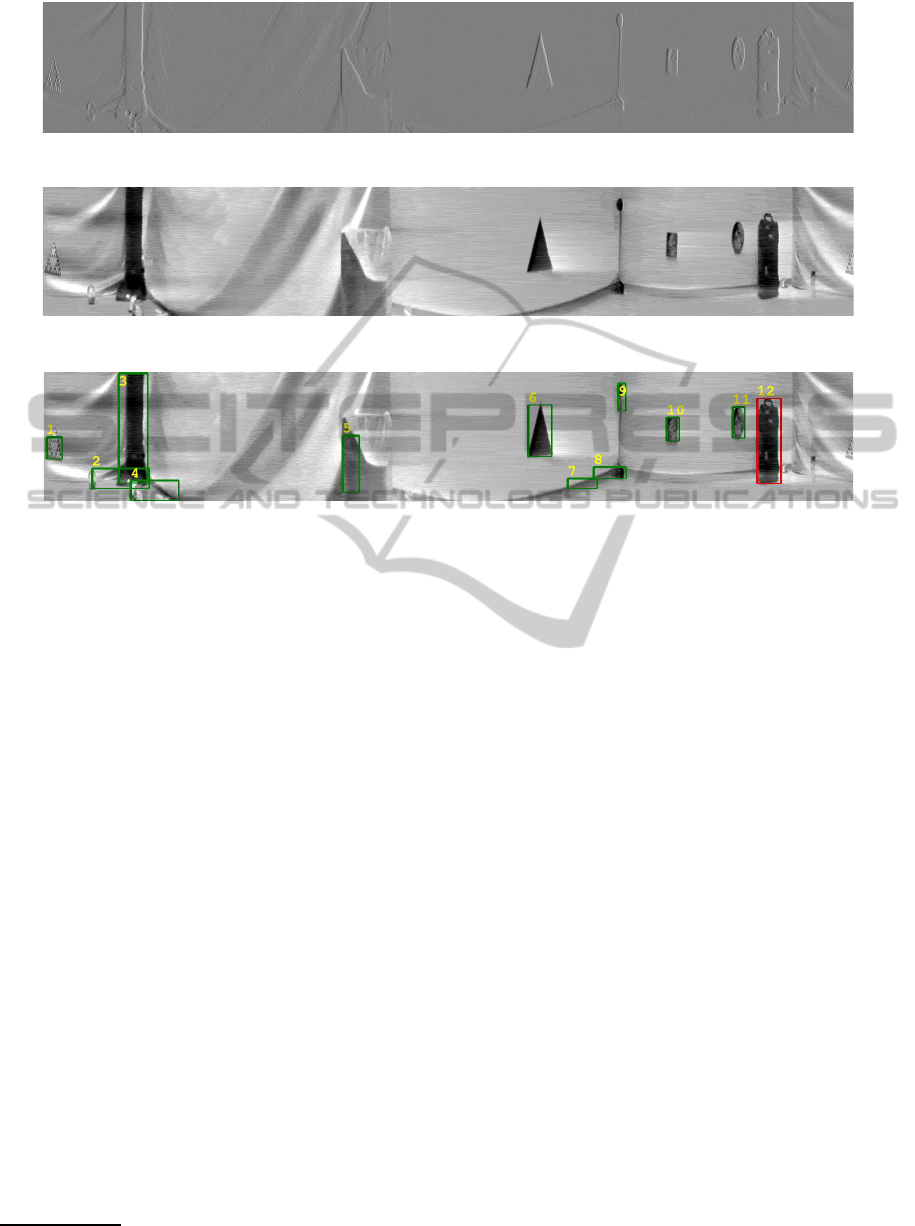
Figure 3: Event map generated by 360SCAN.
Figure 4: Reconstructed grayscale image from the event map.
Figure 5: Detected objects.
recognition but do not solve the problem of duplicate
search. A multiresolution approach (Cinque et al.,
1998) for page segmentation is able to recognize text
and graphics by applying a set of feature maps avail-
able in different resolution levels. This method breaks
down an image into several blocks that represent text,
line-drawings and pictures. However, too much addi-
tional analysis effort is required to compare the shapes
provided by our smart camera. The AIT matchbox
tool (Huber-M¨ork and Schindler, 2012), developed
for the SCAPE project
1
, is based on the OpenCV li-
brary and implements image comparison for digitized
text documents. The similarity computation task is
based on the SIFT (Lowe, 2004) feature extraction
method. This tool demonstrates high accuracy, good
performance and provides duplicate search and com-
parison of digitized collection but is limited for text
in images and is too slow to be applied to the smart
camera domain.
In order to meet the requirements of quality con-
trol for our smart camera, we use image processing
application based on the ImageMagick (Salehi, 2006)
tool and PSNR metric. The application compares the
camera output (see Figure 3-4) to a reference image
collection in order to detect objects (see Figure 5) and
to analyse the surrounding environment. This tool ex-
tends the functionality of matchbox for the domain of
smart cameras with the ability to analyse images and
video frames including segmentation. This applica-
1
http://www.scape-project.eu/
tion could be reused for the domain of digital preser-
vation for Braille domain e.g. detection of shapes,
forms, text blocks and for similar tasks.
3 BRAILLE EDUCATION
SYSTEM CONCEPTS
With increasing volumes of graphical data produced
by smart cameras, data analysis plays an increasingly
important role. The figures of interest should be de-
tected. In order to carry out this detection, we con-
duct an image analysis according the object detection
workflow shown in Figure 2. Our hypothesis is that
we can detect figures of interest applying image pro-
cessing algorithms. We assume that the reference im-
ages stored in database will have significant similarity
with objects extracted from recorded image. In order
to meet these expectations, we analyze images for du-
plicates using the PSNR metrics and applying a work-
flow for duplicate search to ensure the correct object
detection. In database we store figures of interest for
particular educational task.
We started workflow with edge detection using
event map 3 created by camera. In the second step we
employ filtering for required pixels or masking if re-
quired for the reconstructed greyscale image 4. Then
we applied pre-clustering employing parameter like
pixel distance and cluster distance. The object sepa-
ration occurred using clustering with parameters like
CSEDU2014-6thInternationalConferenceonComputerSupportedEducation
216

Figure 6: The bag recognition sample.
pixel distance, cluster distance, edge density, evalua-
tion steps on X and Y axis, min cluster size, cluster di-
mension filter. The output of object detection step are
objects marked by green rectangle 5. We alse depicted
object number by yellow colour. Among the detected
objects we searched for objects of interest and per-
formed object recognition applying image compari-
son. E.g. PSNR metric and ImageMagick.
4 EVALUATION OF THE
360SCAN IMAGE PROCESSING
A sample application of our approach for bag detec-
tion is depicted in 6. The algorithm for that was writ-
ten in Python 2.7 and given figure demonstrates out-
put of the program.
In this case according to the above described
workflow we masked the original raw image
(draw.png). In mask orig.png white dots demonstrate
dark areas of the raw image and black colour shows
hell areas in the raw image. Then in imgdraw.png
we filter and cluster detected pixels in order to sep-
arate possible objects. Finally in final.png we mark
detected objects with green rectangles, depict object
number by yellow number and recognized objects by
red rectangles. Therefore found bag is marked by red
rectangle and has number 2 in this case.
A vertical resolution of 360SCAN camera is 256
pixel. Therefore for 16 to 16 pin-matrix we should
compress raw information to required size applying
Equation 1.
G
n,m
= {a
n
,b
m
},n ∈ {0,1,...,15},m ∈ {0,1,...,15},
p = 16, (1)
a
n
=
1
p
p−1
∑
k=0
x
pn+k
,
b
m
=
1
p
p−1
∑
k=0
y
pm+k
.
Where G
n,m
represents the graphical Braille dots
grid computed over the dimension 16 x 16 dots. This
BrailleVisionUsingBrailleDisplayandBio-inspiredCamera
217

functions are dependent from camera settings. E.g.
for evaluation set vertical resolution of the camera
was set to 256 pixels and vertical resolution was 1600
pixels. The n and m represent the dot number for
X and Y axis. A dot value for pixels around a grid
point is computed as an average value over all eval-
uated pixels which are located in acceptable distance
to the grid point. For one grid point in our evaluation
case we regard p = 16 neighbouring values p/2 to the
left and to the right p/2 from the current value for X
and Y axes. The set G
n,m
is dependent on a
n
and b
m
functions.
Equation Equation 2 calculates dot values.
S
n,m
=
∑
n,m
δ
n,m
· d(P
n,m
,G
n,m
) (2)
δ
n,m
=
(
1 if d(P
n,m
,G
n,m
) < d
max
,
0 else.
d(P
n,m
,G
n,m
) =
q
(G
x
− P
x
)
2
+ (G
y
− P
y
)
2
.
Where S
n,m
represents the value of matching de-
tected pixels P
n,m
with coordinates P
x
and P
y
com-
puted over the dimensions n and m around correspon-
dent grid point G
n,m
with coordinates G
x
and G
y
. d
represents the distance between a grid point and an
evaluated current pixel point coordinates. d
max
is a
threshold value for decision between black (0) and
white (255) colour e.g. 127. δ
n,m
is a coefficient with
value 1 for pixel range < d
max
or 0 otherwise.
Therefore presentation appropriated for Braille
user can be calculated using this method and is shown
in Figure 7 for triangle and in Figure 8 for circle.
5 CONCLUSIONS
We have presented a system for Braille learning sup-
port using the smart camera 360SCAN. Learning sup-
port for visually impaired people is required for spe-
cific information presentation, which in turn relies on
standard Braille output device and automatically pro-
cessing of bio-inspired smart camera images in a nat-
ural environment. In order to provide education sup-
port, we apply image processing on recorded images
and object recognition to the smart camera output.
The edge detection methods enhances object recog-
nition by providing accurate object shapes of real-live
objects and makes this system unique for object pre-
sentation to visually impaired people.
The main contribution of described work is a sys-
tem including a smart camera, a Braille module and
an image processing algorithm implementation that
Figure 7: A triangle demonstration for Braille user.
Figure 8: A circle demonstration for Braille user.
provides methods for shape detection of real-live fig-
ures and supports automatic information presentation.
Another contribution of the proposed method is that
image edges can be transformed to the presentation
on Braille display also directly without any image
processing. It is possible due to bio-inspired con-
struction of camera sensor. Additional contribution is
that our approach provides Braille users with images
recorded from natural scenes. This approach makes
use of the modern image processing libraries. We
employ state-of-the-art features extraction and clus-
tering methods. We conducted several experiments
that evaluate the methods we have implemented and
demonstrate learning figures captured by the smart
camera presented in form of taxels. The experimen-
tal evaluation presented in this paper demonstrates the
effectiveness of employing the image processing tech-
niques for an education system.
As future work we plan to produceour own Braille
display in order to use it as an output device for
360SCAN camera. We plan to extend an automatic
education approach of image analysis to new applica-
tion scenarios also involving information storage and
CSEDU2014-6thInternationalConferenceonComputerSupportedEducation
218

digital preservation. The educational use cases could
be extended with specific software for visually im-
paired people in order to give a method at hand to
work with figures and images.
REFERENCES
Belbachir, A., Mayerhofer, M., Matolin, D., and Colin-
eau, J. (2012). Real-time 360 panoramic views using
bica360, the fast rotating dynamic vision sensor to up
to 10 rotations per sec. In Proceedings of the Circuits
and Systems (ISCAS), 2012 IEEE International Sym-
posium on, pages 727–730.
Cinque, L., Lombardi, L., and Manzini, G. (1998). A mul-
tiresolution approach for page segmentation. Pattern
Recognition Letters, 19(2):217 – 225.
Epshtein, B., Ofek, E., and Wexler, Y. (2010). Detect-
ing text in natural scenes with stroke width transform.
In Computer Vision and Pattern Recognition (CVPR),
2010 IEEE Conference on, pages 2963 –2970.
Erp, J., Kyung, K.-U., Kassner, S., Carter, J., Brewster, S.,
Weber, G., and Andrew, I. (2010). Setting the stan-
dards for haptic and tactile interactions: Isos work. In
Kappers, A., Erp, J., Bergmann Tiest, W., and Helm,
F., editors, Haptics: Generating and Perceiving Tangi-
ble Sensations, volume 6192 of Lecture Notes in Com-
puter Science, pages 353–358. Springer Berlin Hei-
delberg.
Huber-M¨ork, R. and Schindler, A. (2012). Quality as-
surance for document image collections in digital
preservation. In Proc. of the 14th Intl. Conf. on
ACIVS (ACIVS 2012), LNCS, Brno, Czech Republic.
Springer.
Jim´enez, J., Olea, J., Torres, J., Alonso, I., Harder, D., and
Fischer, K. (2009). Biography of louis braille and in-
vention of the braille alphabet. In Survey of Ophthal-
mology, pages 142–149.
Lowe, D. G. (2004). Distinctive image features from
scale-invariant keypoints. Int. J. of Comput. Vision,
60(2):91–110.
Matschulat, G. D. (1999). Tactile reading device. Number
EP0911784.
Prescher, D., Weber, G., and Spindler, M. (2010). A tactile
windowing system for blind users. In Proceedings of
the 12th International ACM SIGACCESS Conference
on Computers and Accessibility, ASSETS ’10, pages
91–98, New York, NY, USA. ACM.
Salehi, S. (2006). Imagemagick tricks, web image effects
from the command line and php. page 226, Olton,
Birmingham, B27 6PA, UK. Packt Publishing Ltd.
Zeng, L. and Weber, G. (2010). Collaborative accessibil-
ity approach in mobile navigation system for visually
impaired. In Virtuelle Enterprises, Communities and
Social Networks, Workshop GeNeMe ’10, TU Dresden
07./08.10.2010, pages 183–192.
Zeng, L. and Weber, G. (2011). Accessible maps for the
visually impaired. In Proc. ADDW 2011, CEUR, vol-
ume 792, pages 54–60.
BrailleVisionUsingBrailleDisplayandBio-inspiredCamera
219
