
Cyber-virtual Systems
Simulation, Validation & Visualization
Jan Olaf Blech, Maria Spichkova, Ian Peake and Heinz Schmidt
RMIT University, Melbourne, Australia
Keywords:
Cyber-physical Systems, Virtual Interoperability Testing, Simulation, System Modeling, Formal Specifica-
tion, Visualization.
Abstract:
We describe our ongoing work and view on simulation, validation and visualization of cyber-physical systems
in industrial automation during development, operation and maintenance. System models may represent an
existing physical part – for example an existing robot installation – and a software simulated part – for example
a possible future extension. We call such systems cyber-virtual systems. In this paper, we present the existing
VITELab infrastructure for visualization tasks in industrial automation. The new methodology for simulation
and validation motivated in this paper integrates this infrastructure. We are targeting scenarios, where indus-
trial sites which may be in remote locations are modeled and visualized from different sites anywhere in the
world. Complementing the visualization work, here, we are also concentrating on software modeling chal-
lenges related to cyber-virtual systems and simulation, testing, validation and verification techniques for them.
Software models of industrial sites require behavioural models of the components of the industrial sites such
as models for tools, robots, workpieces and other machinery as well as communication and sensor facilities.
Furthermore, collaboration between sites is an important goal of our work.
1 INTRODUCTION
Operation, development, maintenance (including
modifications and extensions) of industrial automa-
tion facilities like factories or mining sites profit from
software support such as software based monitoring,
controlling and collaboration tools. This requires
visualization capacities as well as software models
of the physical entities involved and ways to reason
about them.
Industrial automation facilities typically comprise
machinery like robots and their components. Compo-
nents may serve as actuators: tools, conveyor belts,
work pieces or pipes, valves and pumps in cases were
fluids or gases are processed. Sensors can be found
throughout industrial automation sites. The data
gathered from the sensors may be stored in a central
facility.
Hardware-in-the-loop (HIL) approaches
(Schlager, 2008) are now standard in the devel-
opment of system components in domains such as
automative systems, e.g., (Isermann et al., 1999),
avionics and also in industrial automation. In HIL,
parts of a system are simulated in software to test
a distinct system component. In this paper, we are
going one step further and aim at simulating different
parts of an industrial site. We do not restrict our ap-
proach to the development, but also aim at supporting
operation and maintenance of industrial automation
facilities. Furthermore, we aim at visualizing remote
facilities or parts of them. This is especially crucial
when developing, operating or maintaining industrial
sites located in areas that are difficult to access such
as mines and oil rigs and for collaboration between
different sites and sharing knowledge between them.
In the case where components of a system are
manufactured at different places, transport from
component development and production locations to
integration and deployment sites can significantly
increase the whole development costs as well as
time. Integration can reveal additional work tasks
and further transportation of the system’s parts may
be necessary. If a system’s components are bulky
or heavy, this may also delay optimization and
correction.
For this reason, we present an existing visual-
ization infrastructure - the Virtual Interoperability
Test Lab (VITELab)
1
. a global laboratory connecting
1
VITELab is an eResearch facility of the Australia-
India Research Centre for Automation Software Engi-
neering (AICAUSE), a partnership between RMIT Uni-
218
Olaf Blech J., Spichkova M., Peake I. and Schmidt H..
Cyber-virtual Systems - Simulation, Validation & Visualization.
DOI: 10.5220/0004952402180225
In Proceedings of the 9th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE-2014), pages 218-225
ISBN: 978-989-758-030-7
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

industry and university sites and providing a collab-
oration platform for experimental design and testing
of cyber-physical systems. Among its aims are to
reduce development costs by simulating and virtually
testing possible deployments before the system is
actually physically set up.
We also present the corresponding new and
ongoing research directions towards combining vi-
sualization and software support for reasoning about
industrial automation facilities. The ideas featured in
this paper comprise the following ingredients:
• The use of VITELab, in particular the Global Op-
erations Visualization (GOV) Lab, a high resolu-
tion multi-screen visualization facility.
• Software models for system components that
comprise spatio-temporal information about a
component’s behavior and ways to reason about
them, testing and simulation.
• The combination and integration of these for in-
dustrial automation.
Our work is a step towards software solutions facili-
tating global collaboration between developers, oper-
ators and maintenance of industrial sites.
2 RELATED WORK
Modelling Aspects. Different languages exist for
the modeling of embedded and automation systems.
Standards like IEC 61131-3 and IEC 61499 tar-
get the software part of control systems and thus
specify the behavior of machinery. In the scien-
tific community different modeling languages such
as the Petri-Net semantics based BIP (Basu et al.,
2006) for distributed asynchronous systems and Mod-
elica, providing means for modeling and simula-
tion of systems have been established, cf. (Do-
nath et al., 2008), (Fritzson, 2004), (Anderson and
Fritzson, 2013). Modelica is object-oriented and
its latest extensions allow modelling of system re-
quirements (Tundis et al., 2013) as well as simu-
lation of technical and physical systems (Fritzson,
2011). Modeling theories for distributed hybrid sys-
tem such as SHIFT (Deshpande et al., 1997) and R-
Charon (Kratz et al., 2006) guarantee a complete sim-
ulation and compilation of the models, but do not sup-
port verification or analysis of the system on the mod-
eling level. Same limitations also apply to the input
language of the model checkers UPPAAL (Behrmann
versity and the ABB Group (Australia and India),
http://rmit.edu.au/research/aicause
et al., 2004) and PHAVer (Beek et al., 2006): the ver-
ification capabilities do not match the whole expres-
siveness of the modeling languages.
Assigning semantics to logical entities for catego-
rizing and reasoning about them is a one goal of our
models for industrial automation facilities. The con-
cept has been made popular in the context of the se-
mantic web (Berners-Lee et al., 2001) and ontologies
(Staab et al., 2001).
Spatial Aspects. The modeling of industrial au-
tomation sites involves spatial aspects. For example,
robots must ensure a behavior that guarantees col-
lision avoidance and the correct handling of work-
pieces. Systems that comprising thermal aspects like
heat exchangers need adequate models to cover their
behavior. SpaceEx (Frehse et al., 2011) allows the
modeling of continuos hybrid systems based on hy-
brid automata. It can be used for computing over-
approximations of the space occupied by objects. A
process algebra for 3D objects is provided in (Cardelli
and Gardner, 2010). Results on spatial interpreta-
tions are explained in (Hirschkoff et al., 2003). A
quantifier-free rational fragment of logic suitable for
describing spatial scenarios has been shown to be
decidable in (Dal Zilio et al., 2004). Logics for
spatio-temporal reasoning go back to the seventies.
The Region Connection Calculus (RCC) (Bennett
et al., 2002) includes spatial predicates of separation.
RCC features predicates indicating that regions do not
share points at all, points on the boundary of regions
are shared, internal contact where one region is in-
cluded and touches on the boundary of another from
the inside, overlap of regions, and inclusion.
Cyber-physical Aspects. Many approaches on
mechatronic/cyber-physical systems omit an abstract
logical level of the system representation and lose
the advantages of the abstract representation. The
work presented in (Vogel-Heuser et al., 2011) de-
fines an extensive support to the components com-
munication and time requirements, while the model
discussed in (Hadlich et al., 2011) proposes a com-
plete model of the processes with communication.
In traditional development of embedded systems e.g.,
(Berger, 2002), the system is usually separated into
software and hardware parts as soon as possible, at
an early stage of the development process. This does
not always benefit the development process, because
when using an abstract level of modeling the differ-
ence in the nature of components does not necessar-
ily play an important role. (Sapienza et al., 2012)
and (Spichkova and Campetelli, 2012) independently
suggest to use a platform-independent design in the
early stages of system development. The approach
presented in (Sapienza et al., 2012) introduces the
Cyber-virtualSystems-Simulation,Validation&Visualization
219
idea of pushing hardware- and software-dependent
design as late as possible, however, the question of the
current practical and fundamental limitations of log-
ical modeling in comparison to cyber-physical test-
ing, is not completely answered. In comparison to
(Sapienza et al., 2012), the focus of (Spichkova and
Campetelli, 2012) is on reutilisation and generalisa-
tion of two existing software systems development
methodologies (both elaborated according to the re-
sults of the case studies motivated and supported by
DENSO Corporation and Robert Bosch GmbH) for
application within the cyber-physical domain to bene-
fit from the advantages these techniques have shown.
The question, how deep we can go on the modeling
of cyber-physical systems on the logical level is still
open in both approaches. The goals presented here
are also related to hybrid commissioning (Dominka
et al., 2007).
Early Analysis Aspects. The idea of early anal-
ysis of critical system faults has the goal to identify
faults which mutate the safety critical behaviour of
the system, and to identify test scenarios which can
expose such faults from an abstract modeling level,
i.e. by generation of tests (both for real system and its
model) from formal specifications or from the CASE
tool models (cf., e.g., (Hazra et al., 2013; Broy et al.,
2005; Pretschner and Philipps, 2005)). The approach
has certain limitations due the abstract nature of the
formal model serving as a base for the test generation
as well as an underlying assumption of existence of a
precise formal model of the system being developed.
Even when taking into account these limitations and
assumptions, these approaches allow automatization
of test case design and make the design process more
stringent. VITELab and the described research com-
plements commercially available visualization soft-
ware for collaboration purposes in industrial automa-
tion such as DELMIA
2
. The approach described here,
is building on (semi-)formal models which carry se-
mantic meaning and are suitable for automatic inter-
pretation and processing, whereas the DELMIA focus
is even more on visualization.
3 FROM CYBER-PHYSICAL TO
CYBER-VIRTUAL SYSTEMS
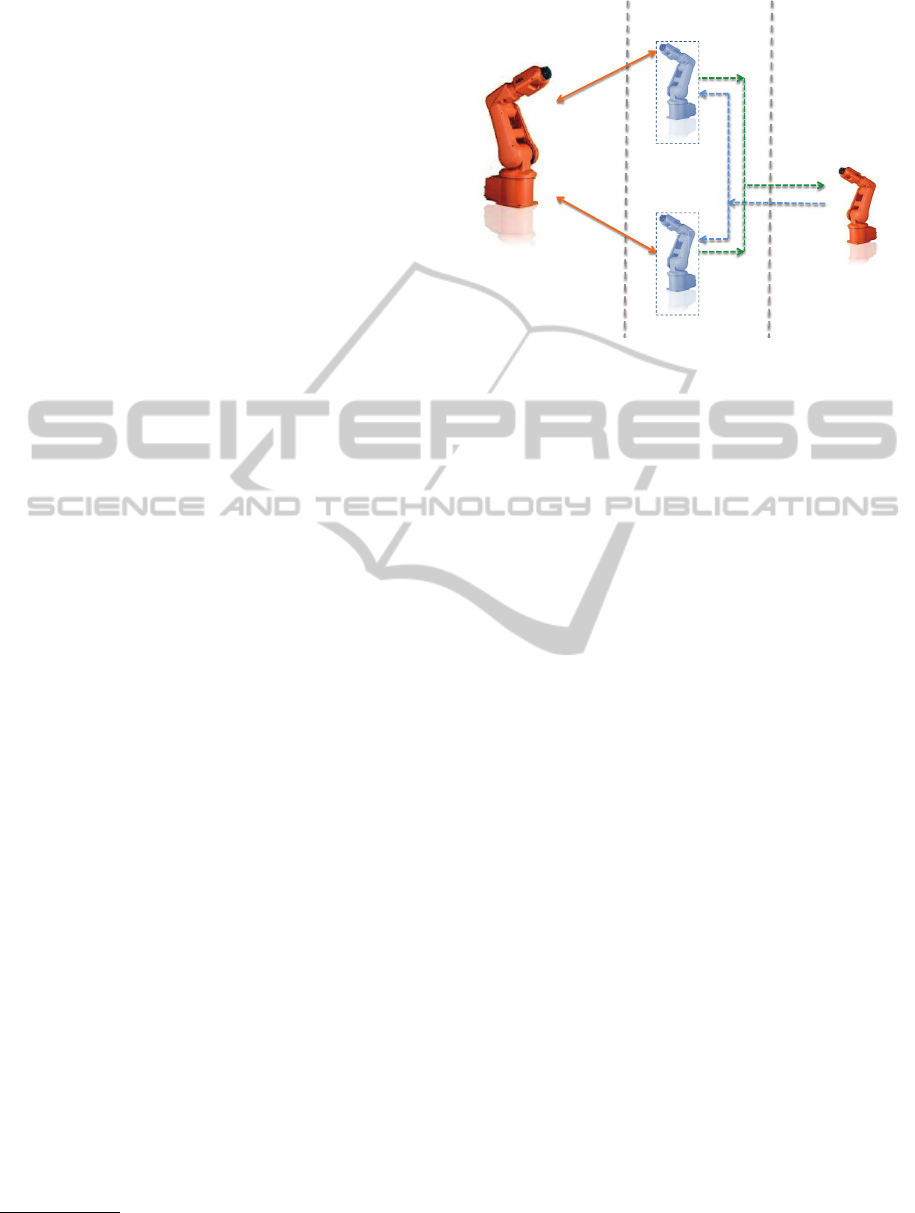
Let us discuss an example scenario based on the ideas
of the virtual interoperation testing. In an indus-
trial plant we require the integration/interoperability
of n + 1 bulky/heavy robots (cf. Figure 1): a robot of
2
http://www.3ds.com/products-
services/delmia/products/all-delmia-products/
!"#$%&'(!)*+,%-".(&'%,($"&,/(
,"0%-".(1(
&'%,($"&,/(
,"0%-".(2(
333(
&"4"5(6
(
&"4"5(7
(
*"/',(7
1(
*"/',(7
.(
&'8,)0%-".(
"9(%05+%5"&(
).9"&*%-".(
0"*8"!)-".(
"9(!)*+,%5'/(
!'.!"&(
).9"&*%-".(
0:4'&;<)&5+%,(
).5'&%0-".(
Figure 1: Cyber-virtual communication.
the type AType (lets call it robot A) is assembled in
location L
A
, the n other robots are of a different type
BType and are assembled in a different location lo-
cation L
B
. The robots are in different locations and
making them work together in a different shared de-
ployment location requires extensive simulation, test-
ing and collaboration.
Assuming in addition that the n robots of type
BType perform simultaneously similar movements
and actions (e.g., they stamp similar details on work-
pieces on a conveyor belt and are doing the same
movements, even in the case their stamps are differ-
ent), we can simulate their behaviour using a single
robot B: its actuator information will be replicated
to obtain n virtual models B
1
, . . . , B
n
, and its sensor
information will be extended by the composition of
the modeled sensor information from B
1
, . . . , B
n
. The
sensor information of the robot A will be a composi-
tion of the real sensor data and the sensor data mod-
eled according to the actions of B
1
, . . . , B
n
.
Thus, to check the interoperability of the robot A
and n robots of the type BType on the level of virtual
interoperability testing, we need only two real robots:
a robot A and a robot B. Moreover, they could be lo-
cated in L
A
and L
B
respectively, because the simulator
and visualization facility may take the role of a physi-
cal medium between them, allowing to ignore the real
distance between robots and also allowing to have a
visualisation of the test and simulation not only at L
A
and L
B
, but also on the third place L
C
, where the cor-
responding laboratory is located.
General ideas for using the virtual interoperabil-
ity test lab (VITELab) for the use of remote cyber-
physical integration/interoperability testing in a vir-
tual environment as a middle step between an ab-
stract modelling and real testing were presented in
(Spichkova et al., 2013a). Figure 2 shows the VITE-
Lab facility in operation, viewed from the GOV Lab.
ENASE2014-9thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
220

Figure 2: VITElab in operation.
VITELab gives a platform for a new level of simula-
tion and integration: interoperability simulation and
testing is performed early and remotely, for exam-
ple while cyber-physical components are in the pro-
totyping stage i.e. on the workbench: individual com-
ponents (e.g., robots, manufacturing cells), are con-
nected in a suitable virtual environment, without be-
ing deployed at the same place physically. Successful
testing and simulation could significantly reduce the
well-documented costs arising from discovery of de-
sign faults after implementation.
Research connected to VITElab is influenced by
larger cooperations in the industrial automation do-
main. Remote integration and testing allows for an
integration and testing phase of a real system assum-
ing a certain level of abstraction where the network,
the virtual environment and the remote embodiments
may be abstractions themselves. This level of abstrac-
tion includes real physical components of the system
(in the case of the VITElab project, e.g., real robots
and production plants) and more characteristics of the
network, environment and embodiments. Our models
and their visualization can give us the possibility to
identify (i) a number of problems and inconsistencies
on the early stage of system development and verify
especially important system’s properties before the
real system is build and integrated, and (ii) possible
weak points in the system (such as some timing prop-
erties, feature interactions, component dependancies)
which we should focus on, during the testing phase.
4 RESEARCH CHALLENGES
AND CORRESPONDING
PROJECTS
This section presents research challenges connected
to cyber-virtual systems, VITELab, simulation and
validation in more detail.
Main Directions for Research. We have identified
the following research challenges in our scenario:
• Simulation and the visualization of simulation
runs.
• Testing, verification and validation of cyber-
virtual scenarios.
• Gaining expertise and knowledge from joint work
using visualization and simulation.
• Sharing and making expertise and knowledge
available for similar development projects and for
related operation and maintenance tasks in related
facilities.
Software Models for Industrial Plants. In our
work, we propose two ingredients related to software
models for addressing these challenges:
• (Semi-)formal descriptions based on human
factors approaches to achieve better readabil-
ity/usability and understandability.
• Spatial behavioral models that capture the charac-
teristics of entities and components in industrial
automation. We are interested in establishing a
type system for these components.
Existing VITELab Projects. The research chal-
lenges identified in the context of VITELab fall into
the network, cloud and distributed computing areas,
and are covered by the following ongoing projects:
• Network connectivity between sites with special-
ist equipment is supported by dedicated links and
research software stacks.
• The Cyber-physical Simulation Rack (CSRack),
is a multi-node cloud server rack with attached
RAID storage provides parallel cloud computing
capability to support modeling and simulation and
the capability to act as a ’cloudlet’ gateway to ma-
jor national and international cloud facilities such
as NeCTAR
3
.
• The Global Operations Visualization (GOV) Lab
project, provides videoconference and streaming
capability to remote sites combined with a large
high resolution tiled display wall.
• The Advanced Manufacturing Robot Interopera-
tion Test (AMRIT) lab provides industrial robots
connected to the GOV lab. The robots com-
prise arms, sensors and cameras as “eyes on the
robots”.
3
National eResearch Collaboration Tools and Resources
Project, https://www.nectar.org.au
Cyber-virtualSystems-Simulation,Validation&Visualization
221

R1
sensors
actuators
R2
sensors
actuators
physical
world
+
software simulation
Figure 3: Robot in the loop.
Further research challenges exist in the connection
of software based development tools for industrial
automation systems to the described infrastructure.
Such tools may need to undergo a redesign of the
software architecture to enable this, cf. (Peake et al.,
2013).
5 FROM (SEMI-)FORMAL
METHODS TO
VISUALIZATION &
VALIDATION
A starting point for our work is a HIL approach and
is depicted in Figure 3. Here, the interplay of a physi-
cal robot with a virtual simulated robot is shown. The
actions of the physical robot to the environment are
observed passed to the robot simulation and reacting
actions are calculated. These actions are (by)passed to
the sensors of the physical robot to simulate the inter-
play. The interplay can be analyzed both by software
tools as well as human inspection. The human based
analysis profits from visualisation capabilities for the
display of the simulated robot and the monitoring of
the physical counterpart.
Human Factors and Formal Models. To enable
simulations we need (semi-)formal descriptions of
robot behavior, which should not only fit for the
simulation purposes but also be readable for sys-
tem/verification engineers. In our approach we follow
the ideas based on human factor analysis within for-
mal methods (Spichkova, 2013a; Spichkova, 2012).
This allows to have short and readable specifications
of component behavior. It is appropriate for switching
between different modeling, specification and pro-
gramming languages and is suitable for the applica-
tion of specification, reasoning and proof methodol-
ogy (Spichkova et al., 2013b; Spichkova, 2007).
Formal Proofs and Verification. In the case of for-
mal proofs, one of the main points of this method-
ology is an alignment of the future proofs during
the specification phase to make the proofs simpler
and appropriate for application in practice. One di-
rection for reasoning about a system represented in
a formal specification framework, is the verification
of its properties by translating the specification to a
Higher-Order Logic and subsequently using the theo-
rem prover following (Spichkova, 2013b).
Spatial Behavioral Types. Our (semi-)formal
models comprise spatial behavioural. This can be
assigned to both physical and virtual simulated
robots, their components and other entities interact-
ing with them as shown in Figure 4. Following the
ideas presented in (Blech et al., 2012) these spatial
behavioural models can serve as a type system similar
to types systems in higher programming languages
like C and Java which come with basic types like
integers, Strings and floating point values as well as
composed types like records or classes. Here, we
regard (spatial) Behavioural Types (BT). BT act as
types for virtual or physical entities in our automation
scenarios. They are characterised by the following
core concepts:
• Abstraction. BT represent aspects of robots, robot
components and other entities in industrial au-
tomation. BT abstract from details concerning in-
teractions and internal structure.
• Conformance. Type conformance of BT is used to
relate entities in industrial automation correctly to
a BT.
• Refinement. BT should comprise a notion of
spatio-behavioral refinement that allows replac-
ing a component by a refined one. For example,
the concept of refinement shall allow replacing a
robot by a newer version that essentially provides
the same functionality plus some new features.
• Compatibility. Compatibility checking of BT is
used to decide whether a component does indeed
match required needs based on provided and ex-
pected BT. It should be decidable and automatic.
• Inference. A BT framework should allow to infer
composed BT. For example, the BT of a robot may
be inferred from the BT of its components.
Spatial Behavioural Types for Simulation and Val-
idation. BT can serve as a specification basis for
the components of robots and the robots composed
of them. BT can be used to build models of industrial
automation facilities. Using BT based specifications,
we can perform:
• Simulation and visualization for human inspec-
tion and collaboration between developers, opera-
tors and maintenance personnel.
ENASE2014-9thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
222
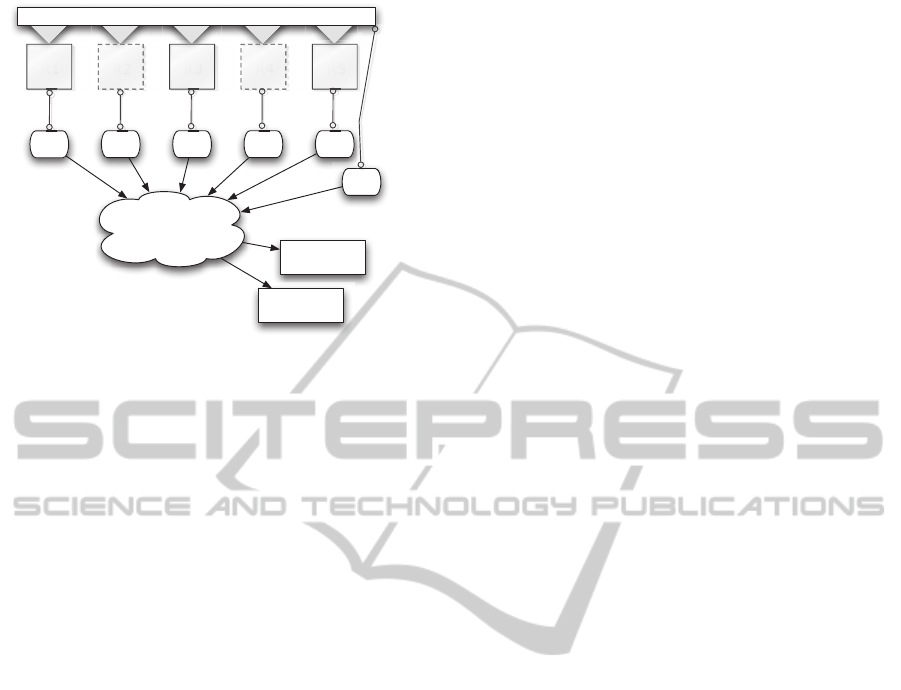
R1 R2 R3 R4 R5
existing robot existing robot
existing robot
simulated robot
simulated robot
BT
BT BT BT BT
BT
composition
analysis
simulation
verification
validation
ot
conveyor belt
visualization
visualization
Figure 4: Combining virtual and physical robots with BT.
• Automatic spatio-temporal reasoning for collision
detection of robots and other entities.
• Checking automatically the required sensor
ranges and regions affected by physical entities.
• Guaranteeing correct interplay of tools and work-
pieces in time and space.
• Simulating the replacement of an entity such as a
robot arm by another (refined) version.
• Documenting behavior of system installations and
sharing this for collaboration.
The BT concept is following the idea of interface au-
tomata (de Alfaro and Henzinger, 2001). It has been
proposed as a type system for OSGi systems in the
past (Blech et al., 2012). Theorem prover export
and interactive verification of properties were stud-
ied in (Blech and Sch
¨
atz, 2012) and may be an issue
for future work together with human-factor analysis.
Checking compatibility and means to make behav-
ioral system descriptions compatible were examined
in (Blech, 2013). For checking the spatio-temporal
properties in our scenarios we incorporate the Be-
SpaceD (Blech and Schmidt, 2013) tool. Checks
in BeSpaceD are done by converting spatio-temporal
models or BT and required properties into SMT and
SAT problems and applying suitable solving tech-
niques such as the z3 SMT solver (De Moura and
Bjørner, 2008).
6 CONCLUSIONS
The presented research is ongoing work and part
of larger cooperations with an industrial automation
company. In this paper, we presented an overview
on the existing VITELab infrastructure facilitating re-
mote collaboration by large screen/multi screen vi-
sualization. The aim of this infrastructure is to re-
duce the development costs by simulating and virtu-
ally testing possible deployments before the system is
actually physically set up. We have highlighted con-
nected research questions, as well as explained the
VITELab applications in operating, developing and
maintaining industrial automation facilities. The con-
nection to spatial behavioral models and a related type
system for the simulation of industrial automation fa-
cilities and the connection to visualization capacities
was presented in more detail.
ACKNOWLEDGEMENTS
We would like to thank staff from RMIT ITS, Proper-
tyServices, eResearch and the VITELab team, in par-
ticular Lasith Fernando, Ravi Sreenivasamurthy and
Garry Keltie.
REFERENCES
Anderson, A. and Fritzson, P. (2013). Models for
Distributed Real-Time Simulation in a Vehicle Co-
Simulator Setup. In Nilsson, H., editor, Proceed-
ings of the 5th International Workshop on Equation-
Based Object-Oriented Modeling Languages and
Tools. Linkoping University Electronic Press.
Basu, A., Bozga, M., and Sifakis, J. (2006). Modeling
heterogeneous real-time components in bip. In 4th
IEEE International Conference on Software Engineer-
ing and Formal Methods (SEFM), pages 3–12. IEEE.
Beek, D. A. V., Man, K. L., Reniers, M. A., Rooda, J. E.,
and Schiffelers, R. R. H. (2006). Syntax and consis-
tent equation semantics of hybrid Chi. In Journal of
Logic and Algebraic Programming, pages 129–210.
Behrmann, G., David, A., and Larsen, K. (2004). A Tutorial
on Uppaal. In Bernardo, M. and Corradini, F., editors,
Formal Methods for the Design of Real-Time Systems,
volume 3185 of LNCS, pages 200–236. Springer.
Bennett, B., Cohn, A. G., Wolter, F., and Zakharyaschev, M.
(2002). Multi-dimensional modal logic as a frame-
work for spatio-temporal reasoning. Applied Intelli-
gence, 17(3):239–251.
Berger, A. (2002). Embedded Systems Design: An Intro-
duction to Processes, Tools, and Techniques. CMP
Books.
Berners-Lee, T., Hendler, J., Lassila, O., et al. (2001). The
semantic web. Scientific american, 284(5):28–37.
Blech, J. O. (2013). Towards a framework for behavioral
specifications of osgi components. In 11th Interna-
tional Workshop on Formal Engineering approaches
to Software Components and Architectures (FESCA),
pages 79–93.
Blech, J. O., Falcone, Y., Rueß, H., and Sch
¨
atz, B. (2012).
Behavioral specification based runtime monitors for
Cyber-virtualSystems-Simulation,Validation&Visualization
223

osgi services. In Leveraging Applications of For-
mal Methods, Verification and Validation. Technolo-
gies for Mastering Change, pages 405–419. Springer
Berlin Heidelberg.
Blech, J. O. and Sch
¨
atz, B. (2012). Towards a formal foun-
dation of behavioral types for uml state-machines.
ACM SIGSOFT Software Engineering Notes,37(4):1–
8.
Blech, J. O. and Schmidt, H. (2013). Towards modeling
and checking the spatial and interaction behavior of
widely distributed systems. In Improving Systems and
Software Engineering Conference.
Broy, M., Jonsson, B., Katoen, J.-P., Leucker, M., and
Pretschner, A. (2005). Model-Based Testing of Re-
active Systems: Advanced Lectures (LNCS). Springer.
Cardelli, L. and Gardner, P. (2010). Processes in space. In
Programs, Proofs, Processes, pages 78–87. Springer.
Dal Zilio, S., Lugiez, D., and Meyssonnier, C. (2004). A
logic you can count on. In ACM SIGPLAN Notices,
volume 39, pages 135–146. ACM.
de Alfaro, L. and Henzinger, T. A. (2001). Interface au-
tomata. SIGSOFT Softw. Eng. Notes, 26(5):109–120.
De Moura, L. and Bjørner, N. (2008). Z3: An efficient smt
solver. In Tools and Algorithms for the Construction
and Analysis of Systems, pages 337–340. Springer.
Deshpande, A., Gll, A., Gollu, A., and Varaiya, P. (1997).
Shift: A Formalism and a Programming Language for
Dynamic Networks of Hybrid Automata.
Dominka, S., Schiller, F., and Kain, S. (2007). Hybrid
commissioningfrom hardware-in-the-loop simulation
to real production plants. In Proceedings of the 18th
IASTED International Conference on Modeling and
Simulation (MS’07), pages 544–549.
Donath, U., Haufe, J., Blochwitz, T., and Neidhold, T.
(2008). A new Approach for Modeling and Verifica-
tion of Discrete Control Components within a Model-
ica Environment.
Frehse, G., Le Guernic, C., Donz
´
e, A., Cotton, S., Ray,
R., Lebeltel, O., Ripado, R., Girard, A., Dang, T.,
and Maler, O. (2011). Spaceex: Scalable verification
of hybrid systems. In Computer Aided Verification,
pages 379–395. Springer.
Fritzson, P. (2004). Principles of Object-Oriented Model-
ing and Simulation with Modelica 2.1. Wiley-IEEE
Computer Society Press.
Fritzson, P. (2011). Introduction to Modeling and Simula-
tion of Technical and Physical Systems with Modelica.
Wiley-IEEE Computer Society Press.
Hadlich, T., Diedrich, C., Eckert, K., Frank, T., Fay, A.,
and Vogel-Heuser, B. (2011). Common communi-
cation model for distributed automation systems. In
9th IEEE International Conference on Industrial In-
formatics, IEEE INDIN.
Hazra, A., Ghosh, P., Vadlamudi, S. G., Chakrabarti, P. P.,
and Dasgupta, P. (2013). Formal methods for early
analysis of functional reliability in component-based
embedded applications. Embedded Systems Letters,
5(1):8–11.
Hirschkoff, D., Lozes,
´
E., and Sangiorgi, D. (2003). Mini-
mality results for the spatial logics. In FST TCS 2003:
Foundations of Software Technology and Theoretical
Computer Science, pages 252–264. Springer.
Isermann, R., Schaffnit, J., and Sinsel, S. (1999). Hardware-
in-the-loop simulation for the design and testing of
engine-control systems. Control Engineering Prac-
tice, 7(5):643–653.
Kratz, F., Sokolsky, O., Pappas, G. J., and Lee, I. (2006).
R-Charon, a Modeling Language for Reconfigurable
Hybrid Systems. In Hybrid Systems: Computation
and Control (HSCC), pages 392–406.
Peake, I., Blech, J. O., and Fernando, L. (2013). Towards re-
constructing architectural models of software tools by
runtime analysis. In 3rd International Workshop on
Experiences and Empirical Studies in Software Mod-
elling.
Pretschner, A. and Philipps, J. (2005). Methodological Is-
sues in Model-Based Testing. Model-Based Testing of
Reactive Systems, pages 181–291.
Sapienza, G., Crnkovic, I., and Seceleanu, T. (2012). To-
wards a methodology for hardware and software de-
sign separation in embedded systems. In Proc. of the
Seventh International Conference on Software Engi-
neering Advances (ICSEA), pages 557–562. IARIA.
Schlager, M. (2008). Hardware-in-the-loop simulation.
Spichkova, M. (2007). Specification and Seamless Verifica-
tion of Embedded Real-Time Systems: FOCUS on Is-
abelle. PhD thesis, Technische Universit
¨
at M
¨
unchen.
Spichkova, M. (2012). Human Factors of Formal Methods.
In Proc. of IADIS Interfaces and Human Computer
Interaction. IHCI 2012.
Spichkova, M. (2013a). Design of formal languages and
interfaces: “formal” does not mean “unreadable”. In
Blashki, K. and Isaias, P., editors, Emerging Research
and Trends in Interactivity and the Human-Computer
Interface. IGI Global.
Spichkova, M. (2013b). Stream Processing Compo-
nents: Isabelle/HOL Formalisation and Case Studies.
Archive of Formal Proofs.
Spichkova, M. and Campetelli, A. (2012). Towards sys-
tem development methodologies: From software to
cyber-physical domain. In First International Work-
shop on Formal Techniques for Safety-Critical Sys-
tems (FTSCS’12).
Spichkova, M., Schmidt, H., and Peake, I. (2013a). From
abstract modelling to remote cyber-physical integra-
tion/interoperability testing. In Improving Systems
and Software Engineering Conference.
Spichkova, M., Zhu, X., and Mou, D. (2013b). Do we really
need to write documentation for a system? In Interna-
tional Conference on Model-Driven Engineering and
Software Development (MODELSWARD’13).
Staab, S., Studer, R., Schnurr, H.-P., and Sure, Y. (2001).
Knowledge processes and ontologies. Intelligent Sys-
tems, IEEE, 16(1):26–34.
Tundis, A., Rogovchenko-Buffoni, L., Fritzson, P., and
Garro, A. (2013). Modeling System Requirements
in Modelica: Definition and Comparison of Candi-
date Approaches. In Nilsson, H., editor, Proceed-
ings of the 5th International Workshop on Equation-
ENASE2014-9thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
224

Based Object-Oriented Modeling Languages and
Tools. Linkoping University Electronic Press.
Vogel-Heuser, B., S., F., Werner, T., and Diedrich, C.
(2011). Modeling network architecture and time
behavior of distributed control systems in industrial
plant. In 37th Annual Conference of the IEEE Indus-
trial Electronics Society, IECON.
Cyber-virtualSystems-Simulation,Validation&Visualization
225
