
Optimizing the Stretch for Virtual Screening Application on
Pilot-agent Platforms on Grid/Cloud by using Multi-level
Queue-based Scheduling
T. Q. Bui
1,2
, E. Medernach
1
, V. Breton
1
and H. Q. Nguyen
2
1
Laboratoire de Physique Corpusculaire, Universite Blaise Pascal, 63171 Aubiere, France
2
Institut de la Francophonie pour l’Informatique, Vietnam National University, Hanoi, Vietnam
Keywords: Virtual Screening, Grid Computing, Cloud Computing, Scheduling, Fairness, Stretch, Online-algorithm,
Multilevel Queue Scheduling.
Abstract: Virtual screening has proven very effective on grid infrastructures. We focus on finding platform scheduling
policy for pilot-agent platform shared by many virtual screening users. They need a suitable scheduling
algorithm at platform level to ensure a certain fairness between users. Optimal criterion used in our research
is the stretch, a measure for user experience on the platform. From our latest research (Quang et al., 2013),
simulation result and experimentation on real pilot agent platform showed that SPT policy is the best policy
in 4 different existing scheduling policies (FIFO, SPT, LPT and Round Robin) for optimizing the stretch.
However, research on real grid workload (Medernach, 2005) showed that there are two types of grid user:
normal users who submit frequently little jobs to grid and data challenge users who submit occasionally
large number of jobs to grid. And SPT policy, in particularly, is not appropriate for data challenge user
because they have to wait always normal user. In this paper, we proposed a new policy named SPT-SPT
which uses multi-level queue scheduling technique for scheduling in a pilot agent platform. In SPT-SPT
policy, the administrator creates two separate user groups in the platform: Normal group and Data
Challenge group. Each group has their own task queue in the platform and SPT policy is applied on it. A
parameter p (p ϵ [0,1]), the probability that task queue is chosen to send pilot agent their task, is assigned to
one task queue and 1-p for the other one. This policy improves user experience for Data Challenge group
and do not impact very much for Normal group.
1 INTRODUCTION
In silico drug discovery (in silico means computer-
assisted) offers an efficient alternative to reduce the
cost of drug development and to speed-up the
discovery process. Virtual screening is achieved
through a pipeline analysis whose first step requires
using a docking software such as Autodock, DOCK
or FlexX to predict potential interacting complexes
of small molecules in protein binding sites. From
now, we use VS to denote virtual screening.
Large scale virtual screening, and especially its
docking step, consumes large computing resources.
As docking is an embarrassingly parallel process
where thousands to millions of compounds are tested
in silico against a biological target, it was
successfully deployed on grid computing to reduce
the computation time. Some large scale VS projects
in the past have been deployed successfully on grids
such as WISDOM-I (Jacq et al., 2006) and
WISDOM-II (Kasam et al., 2009) on malaria or
Avian Flu Data Challenge (Jacq et al., 2008).
Pilot-agent platforms are tools used for
submitting and controlling a large number of user
jobs on grid infrastructures. Several pilot agent
platforms have been developed such as WPE
(Kasam et al., 2009), DIRAC (van Herwijnen et al.,
2003), DIANE (Mościcki, 2003), glideinWMS
(Sfiligoi, 2008), PanDA(Maeno, 2008). The DIRAC
pilot-agent platform is now available to the users of
several multi-disciplinary virtual organizations on
EGI (the European Grid Initiative). Because many
users share the DIRAC pilot-agent platform, it is
important to define a scheduling policy to ensure a
certain degree of fairness so that users receive a fair
share of system resources. The scheduling policies
used on the existing pilot-agent platforms on EGI,
199
Bui T., Medernach E., Breton V. and Nguyen H..
Optimizing the Stretch for Virtual Screening Application on Pilot-agent Platforms on Grid/Cloud by using Multi-level Queue-based Scheduling.
DOI: 10.5220/0004962801990204
In Proceedings of the 4th International Conference on Cloud Computing and Services Science (CLOSER-2014), pages 199-204
ISBN: 978-989-758-019-2
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

are respectively First In First Out (FIFO) policy in
WPE platform or Round Robin policy in DIRAC
platform. The VS project has specific properties
such as divisibility in many independent docking
tasks, no order of execution constraints and
comparable execution time of all docking tasks. In
this paper, we focus on evaluating suitable online
scheduling policies for the VS application on the
pilot-agent platform to improve user’s satisfaction in
the system.
Our research is also relevant to applications
which have the same properties of VS application
(divisibility in many independent tasks, no order of
execution constraints and comparable execution time
of all tasks) on pilot agent platform on grid/cloud.
These applications are used in a variety of scenarios,
including data mining, massive searches (such as
key breaking), parameter sweeps, simulations,
fractal calculations, computational biology, and
computer imaging.
1.1 Pull Model, 2-Level Scheduling and
Limited Machine Availability
Property of Scheduling
A pilot-agent platform uses pull model for efficient
submission and controlling of user tasks: tasks are
no longer pushed through the grid scheduler but are
put in a master pool and pulled by pilot agents
running on computing nodes. Scheduling job is the
process of ordering tasks in this pool. List
scheduling is applied in it. The pilot-agent itself is a
regular grid job, which is started through a grid
resource manager. It is submitted automatically by
platform and run on a computing machine on grid.
We can see pilot agent as container of jobs. Pull
model adapts to heterogeneous property of grid
(faster machine will pull more tasks than the other),
reduces faults (resubmission of failed tasks) and
improves latency (the waiting time of job in grid
scheduler is reduced).
Figure 1: Pull model in pilot agent platform on grid.
As shown on figure 1, a pilot-agent platform has
two main modules, the Task Manager and the Agent
Manager.
Pilot agent is submitted automatically to grid by
Agent Manager. Then it communicates with Task
Manager and asks a user task to be executed. Task
Manager receives tasks from user and control queue
of user tasks. It receives also request of pilot agent,
choose some task from queue and sends task to pilot
agent.
Scheduling of pilot agent platform on grid takes
place at site and platform level. The site level
scheduling takes place in the site scheduler. Pilot
agents sent by the platform are distributed to the
sites according to the grid scheduling policy. The
platform level scheduling is done by the platform’s
Task Manager. User sends the VS project to the
Task Manager, where docking tasks are put in the
task queue. The Task Manager Scheduler calculates
task priorities, and responds to pilot agents requests
by sending to them tasks ranked with the highest
priority. There are underlying grid architectural
scheduling and logical scheduling for the specific
grid applications. And in our research, we concern
with scheduling issue for many virtual screening
application users who share the grid resources given
to the same group privilege.
Moreover, platform level scheduling has limited
machine availability property. Because each
computing center imposes some limits to the
maximum computing time for grid job, each pilot
agent is available for a limited period. Therefore the
number of machines available for the platform
changes over time. This specific property makes our
analysis directly relevant to cloud infrastructures
where users buy computing resources for a limited
time.
This paper focuses on finding out the most
suitable scheduling policy at platform level to
optimize the satisfaction of VS users.
1.2 The Stretch – A Measure for User’s
Satisfaction in Platform
To work on the fairness of scheduling policy, we
need to define a good metric for the satisfaction of
an individual user on platform. In the parallel
scheduling literature, metrics used to measure the
performance of scheduling policies can be classified
in two groups: System-centric metrics and Job-
centric metrics:
- System-centric metrics to assess platform
utilization: C
j
denotes the completion time of job
j. Makespan (the maximum of the job
CLOSER2014-4thInternationalConferenceonCloudComputingandServicesScience
200
termination time, max
j
C
j
) or the sum of
completion time (∑
j
C
j
) are common objective
functions. Minimization of makespan or sum of
completion times is conceptually a system-
centric approach.
- Job-centric metrics (Flow time, stretch...) to
assess user experience: Flow time F is the time
an individual job spends in the platform. The
stretch S (also called slowdown) is a particular
case of weighted flow time: for job j with size W
j
and flow time F
j
, the stretch is defined as F
j
/W
j
.
In the context of variable job sizes, the stretch is
more relevant to describe user experience than
the flow time (Legrand et al., 2006).
This paper focuses on user-centric metric. The
stretch is here measured for a group of jobs all
belonging to the same user. Assume that user has U
jobs, F
j
is flow time of job j, W is total size of U
jobs, the stretch is then defined as max
jϵU
F
j
/W
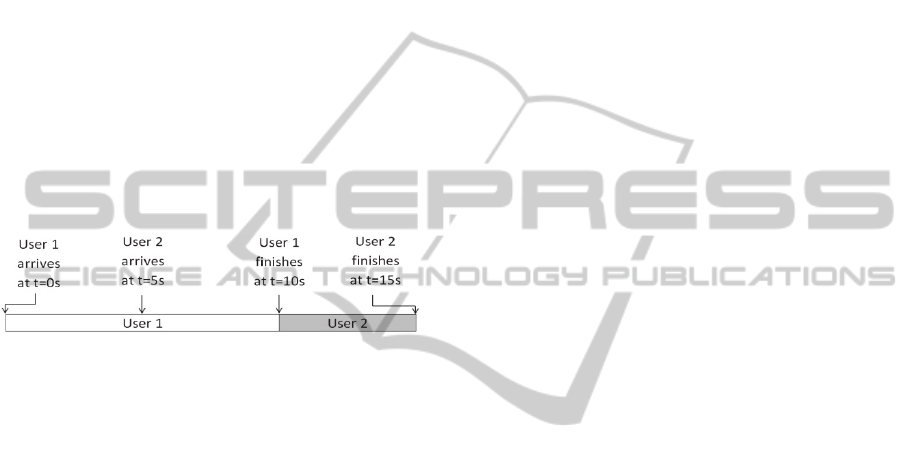
Figure 2: Example of the stretch for two users.
Figure 2 illustrates the mean of stretch in the
case of two users sending jobs to a platform (figure
2). User 1 has a job with size 10 that reaches the
platform at t=0s. User 2 has a job with size 5 that
reaches the platform at t=5s. User 1 job is executed
before user 2 job. As in figure 2, user 1 finishes at
t=10s. Because user 2 has to wait user 1 job
completion, he finishes at t=15s. Although the two
users spent the same time on the platform (10s), user
2 satisfaction is worse than user 1’s. The stretch of
user 1 is equal to 10/10=1 while the stretch for user
2 is equal to 10/5=2. This example illustrates why
the stretch S measures the user experience on the
platform: the larger the stretch, the lower the
satisfaction.
Our goal is to identify the best scheduling policy
to minimize the stretch of all VS users of a shared
pilot-agent platform. We use the max-stretch (Smax)
metrics as measures of fairness in our scheduling
problem. In our latest research (Quang et al., 2013),
we have compared two well-known scheduling
policies, Shortest Processing Time (SPT-the user
with the least number of tasks has the highest
priority) and Longest Processing Time (LPT: the
user with the greatest number of tasks has the
highest priority), to the scheduling policies currently
used on the existing platforms (FIFO and Round
Robin). Simulation result and experimentation result
on real platform has shown that SPT is the best
policy in these 4 policies for online job-centric
stretch optimization with virtual screening
application on pilot-agent platform on
grid/cloud(Quang et al., 2013).
Although SPT policy is very good online
algorithm for optimization of the stretch but this
policy has a disadvantage: it has the tendency to
push users with many tasks to the end of the task
queue. Sometimes these users have to wait a long
time for a long series of users with less number of
jobs. In the worst case, they have to wait forever.
Furthermore, research on grid workloads in
(Medernach, 2005) showed that there are two types
of grid users: normal users and data challenge users.
Normal user submits to the grid little number of
tasks, but the number of user in this group is very
large. While data challenge user group submit to the
grid very large number of jobs, but the number of
users in this group is small. If we use the original
SPT policy for all of user in pilot agent platform,
data challenge user will be negatively affected due
to large number of user in normal group.
In this paper, we propose a new scheduling
policy named SPT-SPT for platform level
scheduling in pilot agent platform which uses multi-
level queue scheduling techniques to improve the
stretch of VS users. Instead of using one task queue
which is implemented by SPT policy for all users,
we use two separate task queues: one for normal
user group and another one for data challenge user
group. These two task queues are both using SPT
policy to optimize the user's stretch in each one.
Moreover, a task queue is assigned a parameter p (p
ϵ [0, 1]) and the rest one with 1 - p. This parameter is
the probability that task queue will be selected by
Task Manager when Task Manager receives request
from pilot agents. We can see that for p > 0, this
policy ensures that the data challenge group did not
have to wait for the normal group to be entirely
empty. Therefore all users will get an opportunity to
utilize grid resources efficiently. The rest of paper is
organized as follows. Section 2 presents the related
works. In section 3, the SPT-SPT scheduling policy
is proposed. Finally, section 4 is our conclusion and
perspective on this research.
2 STATE OF THE ART
2.1 Grid Scheduling
Grid scheduling has been abundantly studied: some
OptimizingtheStretchforVirtualScreeningApplicationonPilot-agentPlatformsonGrid/CloudbyusingMulti-level
Queue-basedScheduling
201

surveys of grid scheduling algorithms are proposed
in (Maruthanayagam, 2010); (Jiang et al., 2007) and
performance of some priority rule scheduling
algorithms is presented in (Azmi, 2011). DIET
platform (Marrow et al., 2003) is a GridRPC
middleware relying on the client/agent/server
paradigm. The scheduling on DIET changes from
FIFO, Round Robin and CPU-based scheduling. But
the operation of DIET platform is different with
pilot-agent platform: DIET use both “push” and
“pull” scheduling. Mandatory requests are pushed
from clients to resources, whereas optional requests
are pulled by resources from clients. Pilot-agent
platform takes most scheduling decisions in a
centralized agent, in contrast, each client and each
server contributes to taking scheduling decisions in
DIET. Therefore, the solutions brought by research
of scheduling problem on DIET platform are not
directly applicable to our problem statement.
In (Berman et al., 1996), author presents a
scheduling solution in application level called
AppLeS. They describe an application specific
approach to scheduling individual parallel
applications on production heterogeneous systems.
They utilize comprehensive information about
application and resource to optimize execution time
of application on grid. Our goal is not to optimize
the execution time of all users but the quality of
service for each user.
Existing pilot agent platforms such as DIANE
(Mościcki, 2003), WPE(Kasam et al., 2009) and
DIRAC (van Herwijnen et al., 2003) have different
scheduling policies: WPE and DIANE platforms
use FIFO while DIRAC uses Round Robin policy.
The VS projects have specific properties such as
divisibility in many docking tasks and no order of
execution constraints. Therefore we need to find a
suitable online scheduling policy for the VS
application on the pilot-agent platform. Fortunately,
in some platform such as DIRAC platform, we can
configure the specific scheduling policy for a user
group sharing the same application. So we can apply
suitable policy in a VS user group to improve
fairness.
2.2 Cloud Scheduling
As mentioned earlier, the limited machine
availability property of the scheduling problem on
pilot agent platform is similar with scheduling on
cloud environment because on cloud environment,
user buys some resources with limited duration.
When a VS project is deployed on an IAAS cloud,
docking task will be executed on a virtual machine
with limited availability.
Some researches on cloud scheduling such as
(Pandey et al., 2010); (Li et al., 2011) have
presented their scheduling algorithms on cloud to
optimize the speed of resources allocation, the price
to pay and the utilization of system resource. But our
object is optimization of the fairness of users when
they share pilot-agent platform together.
In (Luckow et al., 2010), author proposed the
design and implementation of a SAGA-based Pilot-
Job system, which supports a wide range of
application types, and is usable over a broad range
of infrastructures from grids/clusters to cloud
computing. In (Fifield et al., 2011), author showed
also an extension of the pilot agent platform DIRAC
on cloud computing by submitting pilot agent on
Virtual Machine on cloud such as Amazon EC2.
Therefore our research is also relevant to pilot-agent
platforms on Cloud environments.
2.3 Scheduling for Stretch
Optimization with Limited
Machine Availability Constraints
Many groups have conducted research on optimizing
job-centric stretch in the context of dedicated
machines (i.e. always available). In (Muthukrishnan
et al., 1999), S. Muthukrishnan presented the
efficiency of the optimal on-line algorithm SPT on
uniprocessor and multi-processor. Their objective is
optimizing the average of the stretch. In (Legrand et
al., 2006), Legrand has shown that SPT is quite
effective at max-stretch and sum-stretch
optimization in problems with continuous machines.
But compared to these studies, our scheduling
problem uses a user-centric definition of stretch and
adds an additional constraint: machines have limited
availability. With this property, the number of
machines available for platform changes over time
and the complexity of problem increases. In
(Schmidt, 2000), authors have reviewed some
scheduling algorithm in the context of limited
machine availability. LPT is one of the online
scheduling algorithms proposed in this research. But
these researches are done on system-centric metrics
(makespan, sum of completion time…). In our latest
research for scheduling for stretch optimization with
limited machine availability constraints, we
compared two well-known scheduling policies, SPT
and LPT, to the scheduling policies currently used
on the existing platforms (FIFO and Round Robin).
Simulation result and experimentation result on real
platform showed that SPT policy is the best policy in
these 4 policies for optimization of user stretch in
CLOSER2014-4thInternationalConferenceonCloudComputingandServicesScience
202

the context of limited machine availability.
3 SOLUTION PROPOSED
In this section, we briefly explain the proposed
solution using multilevel queue technique in Task
Manager of pilot agent platform. Administrator of
pilot agent platform creates two groups for VS users:
Normal group and Data Challenge group. VS user is
assigned to Normal group by default. When
someone needs to process a big virtual screening
project, he will contact with administrator of pilot
agent platform to change his role to Data Challenge
group in some days or some weeks.
Figure 3: SPT-SPT policy with two task queues.
In Task Manager module, we build two separate
task queues: one for normal group and another for
data challenge group. We assign a priority p to
normal group task queue and 1 – p to the data
challenge group one. The Task Manager will use this
probability as index in order to choose task queue to
send their task when it receives request from pilot
agent.
According to our latest research, SPT is better
than FIFO, LPT, RR for minimizing the user stretch.
Therefore these both task queues use SPT policy for
optimizing the stretch of user on each one (We tried
with policy SPT-RR: SPT on normal group task
queue and Round Robin in data challenge task queue
and SPT-FIFO: SPT on normal group task queue
and FIFO on data challenge task queue. The result of
SPT-RR and SPT-FIFO is worse than SPT policy).
We use algorithm SPT-SPT to control user task in
Task Manager as algorithm 1. Administrator can
change value of parameter p in the configuration of
pilot agent platform.
We can see that with 0 < p < 1 there are always
pilot agents which take a task from Data Challenge
group. Therefore, Data Challenge user does not have
to wait for a long series of normal users which have
less number of tasks. We will use our simulator to
find out the best value of p to decrease S
max
of Data
Challenge group and do not increase very much S
max
of Normal group.
Algorithm 1: SPT-SPT policy in Task Manager scheduler.
p = parameter of task queue of normal user group
while (1)
do
if (receive request from pilot agent) then
if (data challenge task queue is empty
AND normal task queue is empty)
Push pilot agent to pilot agent queue
else if (data challenge task queue is
empty)
Send task of normal task queue to
pilot agent
else if (normal task queue is empty)
Send task of data challenge queue to
pilot agent
else
a = random(0,1)
if (a ≤ p) then
Send task of normal task queue
to pilot agent
else
Send task of data challenge task
queue to pilot agent
end if
end if
end if
end while
4 CONCLUSIONS
The paper describes a new scheduling policy for
virtual screening application on pilot agent platform
for optimizing the stretch of user. We proposed SPT-
SPT policy which uses multilevel queue technique
for platform level scheduling on pilot agent
platform. This approach based on the research of
grid workload which has showed that there are two
types of user (many users submitting small number
of tasks and a little user submitting large number of
tasks). Because Infrastructure as a Service cloud
users buy access to computing resources for a
limited time. This is similar with limited availability
of pilot agent on grid. Therefore, we can also
propose to implement SPT-SPT in deployment of
virtual screening application on cloud environments.
REFERENCES
Azmi, B., 2011. Performance Comparison of Priority Rule
Scheduling Algorithms Using Different Inter Arrival
Time Jobs in Grid Environment. International Journal
of Grid and Distributed Computing, 4(3), pp.61–70.
OptimizingtheStretchforVirtualScreeningApplicationonPilot-agentPlatformsonGrid/CloudbyusingMulti-level
Queue-basedScheduling
203

Berman, F. et al., 1996. Application-level scheduling on
distributed heterogeneous networks. In
Supercomputing, 1996. Proceedings of the 1996
ACM/IEEE Conference on. p. 39.
Fifield, T. et al., 2011. Integration of cloud, grid and local
cluster resources with DIRAC. Journal of Physics:
Conference Series, 331(6), p.062009.
Van Herwijnen, E. et al., 2003. Dirac-distributed
infrastructure with remote agent control. In
Conference for Computing in High-Energy and
Nuclear Physics (CHEP 03).
Jacq, N. et al., 2008. Grid-enabled virtual screening
against malaria. Journal of Grid Computing, 6(1),
pp.29–43.
Jacq, N. et al., 2006. Large scale in silico screening on
grid infrastructures. arXiv preprint cs/0611084.
Available at: http://arxiv.org/abs/cs/0611084
[Accessed December 31, 2013].
Jiang, C. et al., 2007. A survey of job scheduling in grids.
In Advances in Data and Web Management. Springer,
pp. 419–427.
Kasam, V. et al., 2009. WISDOM-II: screening against
multiple targets implicated in malaria using
computational grid infrastructures. Malaria journal, 8,
p.88.
Legrand, A., Su, A. & Vivien, F., 2006. Minimizing the
stretch when scheduling flows of biological requests.
Proceedings of the eighteenth annual ACM symposium
on Parallelism in algorithms and architectures,
pp.103–112.
Li, W., Tordsson, J. & Elmroth, E., 2011. Modeling for
dynamic cloud scheduling via migration of virtual
machines. In Cloud Computing Technology and
Science (CloudCom), 2011 IEEE Third International
Conference on. pp. 163–171.
Luckow, A., Lacinski, L. & Jha, S., 2010. SAGA BigJob:
An extensible and interoperable pilot-job abstraction
for distributed applications and systems. In Cluster,
Cloud and Grid Computing (CCGrid), 2010 10th
IEEE/ACM International Conference on. pp. 135–144.
Marrow, P. et al., 2003. DIET-a scalable, robust and
adaptable multi-agent platform for information
management. BT technology journal, 21(4), pp.130–
137.
Maruthanayagam, D., 2010. Grid scheduling algorithms:
A survey. International Journal of Current Research,
11(2), pp.228–235.
Medernach, E., 2005. Workload analysis of a cluster in a
grid environment. Job scheduling strategies for
parallel processing, (June).
Mościcki, J.T., 2003. Distributed analysis environment for
HEP and interdisciplinary applications. Nuclear
Instruments and Methods in Physics Research Section
A: Accelerators, Spectrometers, Detectors and
Associated Equipment, 502(2), pp.426–429.
Muthukrishnan, S. et al., 1999. Online scheduling to
minimize average stretch. In Foundations of Computer
Science, 1999. 40th Annual Symposium on
. pp. 433–
443.
Pandey, S. et al., 2010. A particle swarm optimization-
based heuristic for scheduling workflow applications
in cloud computing environments. In Advanced
Information Networking and Applications (AINA),
2010 24th IEEE International Conference on. pp.
400–407.
Quang, B.T. et al., 2013. Stretch optimization for virtual
screening on multi-user pilot-agent platforms on
grid/cloud. In Proceedings of the Fourth Symposium
on Information and Communication Technology. pp.
301–310.
Schmidt, G., 2000. Scheduling with limited machine
availability. European Journal of Operational
Research, 121(1), pp.1–15.
CLOSER2014-4thInternationalConferenceonCloudComputingandServicesScience
204
