
Real-time Reconfigurable Scheduling of Aperiodic OS Tasks on
Multiprocessor Systems
Hamza Gharsellaoui
1,2,3
, Atef Gharbi
2
and Samir Ben Ahmed
2,4
1
Higher School of Technology and Computer Science (ESTI), Carthage University, Tunis, Tunisia
2
National Institute of Applied Sciences and Technology (INSAT), Carthage University, Tunis, Tunisia
3
Al-Jouf College of Technology, Technical and Vocational Training Corporation, Al-Jouf, K.S.A.
4
Faculty of Mathematical, Physical and Natural Sciences of Tunis (FST), Tunis El Manar University, Tunis, Tunisia
Keywords:
Preemptive Scheduling, Real-time Reconfiguration, Aperiodic OS Tasks, Multiprocessor Embedded Systems.
Abstract:
The paper deals with the real-time scheduling of aperiodic OS tasks that composed multiprocessor embedded
systems which can change their behaviors at run-time for each reconfiguration scenario. A reconfiguration
scenario is assumed to be any run-time automatic addition, removal, or also update of OS tasks according
to external events or also user requirements. We propose a new approach to check the system’s feasibility
of the tasks while minimizing their response times. An agent-based architecture is proposed to provide run-
time technical solutions for users in order to reach again the system’s feasibility after any reconfiguration
scenario for the whole multiprocessor embedded systems. We discuss the paper’s contribution by analyzing
the experimental results that we did on a running example.
1 INTRODUCTION
This paper deals with the problem of hard schedul-
ing of both periodic, sporadic and aperiodic tasks on
multiprocessor real-time embedded systems in a crit-
ical real-time environment. In this work, we intro-
duce an efficient scheduling algorithm to optimize the
response time of the multiprocessors embedded sys-
tem at run-time while ensuring that all periodic tasks
meet their deadlines and to accept as many sporadic
tasks, which can be guaranteed to meet their dead-
lines after a reconfiguration scenario ψ
h
(h ∈ 1..M)
was applied. This efficient algorithm results in the
dynamic scheduling solutions. These solutions are
presented by a proposed intelligent agent-based archi-
tecture where a software agent is used to evaluate the
response time, to calculate the processor utilization
factor and also to verify the satisfaction of real-time
deadlines. The agent dynamically provides technical
solutions for users where the system becomes unfea-
sible (e.g deadlines are violated).
The organization of this paper is as follows. Section
2 presents the reconfiguration of tasks in the case of
a multiprocessor embedded systems and presents our
new contribution and our proposed algorithm for op-
timal scheduling theory. Section 3 discusses exper-
imental results of the proposed approaches research.
Section 4 summarizes the main results and presents
the conclusion of the proposed approaches.
2 RECONFIGURATION OF
MULTIPROCESSOR
REAL-TIME EMBEDDED
SYSTEMS
Multiprocessor architectures provide a rich comput-
ing environment from which a wide range of problem
domains, including real-time applications can bene-
fit. Efficient and effective scheduling techniques have
been made in the literature (Gharbi et al., 2010). The
major scheduling problem which has been more ad-
dressed is that of assigning a set of tasks to different
processors in the system, in order to minimize the to-
tal response time of the total task set.
Indeed, scheduling algorithms for multiprocessor ar-
chitectures, including those for real-time applications
can be divided into two main categories of static and
dynamic scheduling. In static scheduling, the alloca-
tion of tasks to the processors is determined off-line
prior to the start of task execution. In contrast, dy-
namic scheduling algorithms perform assigning tasks
and processors allocation on-line in order to use more
43
Gharsellaoui H., Gharbi A. and Ben Ahmed S..
Real-time Reconfigurable Scheduling of Aperiodic OS Tasks on Multiprocessor Systems.
DOI: 10.5220/0004988100430048
In Proceedings of the 9th International Conference on Software Paradigm Trends (ICSOFT-PT-2014), pages 43-48
ISBN: 978-989-758-037-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

comprehensive and up-to-date knowledge of the tasks
and the environment (architecture).
In recent real-time systems also, computation model
has become more and more complex and embedded
systems must operate in dynamic environments where
human activities occur at any moment, then some
tasks, such as emergency task, external event task,
human interaction task (add, removal, update), etc.,
arrive aperiodically and for this reason a reconfigura-
tion scenario ψ
h
must be done at run-time to adapt the
whole system to its environment and to handle all the
user requirements.
The goal of our original approach dealing with the re-
configuration and scheduling of real-time systems is
to construct systems that are guaranteed to meet all
hard deadlines and that minimize the response time
for all soft deadlines (Khalgui, 2010). This a chal-
lenge that has frequently not been met to our knowl-
edge and that we aim to meet it in this work. Indeed,
to obtain this goal, this system should be changed and
automatically adapted to its environment on the oc-
currence of random disturbances such as hardware-
software faults. A random disturbance is defined in
this work as any random internal or external event al-
lowing additions, removals or updates of tasks at run-
time to adapt the system’s behavior. Nevertheless,
when an automatic reconfiguration scenario ψ
h
is ap-
plied, the deadlines of new and old tasks can be vio-
lated. We mean by reconfiguration scenario ψ
h
in this
work, the removal, update or addition of new tasks
when they arrive at run-time without prior knowledge
in order to save the whole system when random dis-
turbances happen at run-time. We define an agent-
based architecture that checks the system’s evolution
and defines useful solutions for users when deadlines
are not satisfied after any reconfiguration scenario ψ
h
.
Two cases of suggestions are possible to be provided
by our intelligent agent: modification of worst case
execution times of tasks and the migration of some
tasks from the corresponding processors to others that
belongs to the inclusion set. We need by inclusion
set in our work, the set of processors in which the
tasks can be scheduled after any reconfiguration sce-
nario ψ
h
when a migration request has done and in
this case all the relevant state information of that mi-
gration is transferred to the new processor. Otherwise,
it is called exclusion set. The users should choose one
of these solutions to re-obtain the system’s feasibility
and to minimize the response time of the soft tasks.
We developed a tool RT-Reconfiguration and tested it
in order to support the agent’s services.
As well as we know, our approach is among the first
and best solutions which consists in assigning the pe-
riodic tasks to the various processors for each recon-
figuration scenario ψ
h
is that we propose in this orig-
inal work. It implies a large number of advantages,
in particular to avoid the complexity of multiproces-
sor scheduling systems, and our proposed intelligent
agent try to achieve this objective by focusing on
evenly balancing the load among the processors and
on reducing response times of the total task set.
2.1 Approach Description
To explain our approach well, we assume that there
are K identical processors numbered from 1 to K,
and m real-time tasks numbered from 1 to m that
composed a feasible subset of tasks entitled ξ
old
and need to be scheduled. At time t and before the
application of the reconfiguration scenario ψ
h
, each
one of the tasks of ξ
old
is feasible, e.g. the execution
of each instance in each processor is finished before
the corresponding deadline and the tasks are not
assumed to be arranged in any specific order.
Each processor p assigns a set of periodic tasks
T S
p
= {τ
p
1
, τ
p
2
,...,τ
p
n
}. This allocation is made with
an allowance algorithm at the time of the design.
These tasks are independent and can be interrupted
at any time. Each task τ
p
i
has an execution time
(Worst Case Execution Time) C
p
i
, one period T
p
i
,
a deadline D
p
i
which is assumed to be less than or
equal to its period, e.g. D
p
i
≤ T
p
i
. Each task instance
k has to respect its absolute deadline, namely the k
th
authority of the task τ
p
i
, named τ
p
i,k
which must be
completed before time D
p
i,k
= (k-1)T
p
i
+ D
p
i
. Each
processor p will execute its local tasks by using EDF,
it means that the priorities P
p
i
of periodic tasks are
dynamic and the scheduler guarantees that every
instance of every task will run before its deadline.
These tasks are handled by a global scheduler (GS),
which assigns them to processors by using the state
information of the local schedulers. Moreover, under
EDF scheduling, a task will fit on a processor as long
as the total utilization of all tasks assigned to that
processor does not exceed unity (the total utilization
factor = 1). Finally, for reasons of simplicity, we
assume that all the overheads of context exchange,
scheduling of tasks, the preemption of the tasks and
the migration cost of the tasks are equal to zero.
We assume now the arrival at run-time of a sec-
ond subset ξ
new
which is composed of n real-time
tasks at time t
1
(t
1
= t + ∆t). We have a system
Current
Sys
(t
1
) composed of m + n tasks. In this case a
reconfiguration scenario ψ
h
is applied. The reconfig-
uration of the system Sys
ψ
h
means the modification
of its implementation that will be as follows at time t
1
:
ξ
ψ
h
= Current
ψ
h
Sys
(t
1
) = ξ
ψ
h
new
∪ ξ
old
ICSOFT-PT2014-9thInternationalConferenceonSoftwareParadigmTrends
44

Where ξ
old
is a subset of old tasks which are not af-
fected by the reconfiguration scenario ψ
h
(e.g. they
implement the system before the time t
1
), and ξ
ψ
h
new
a
subset of new tasks in the system. We assume that
an updated task is considered as a new one at time t
1
.
When the reconfiguration scenario ψ
h
is applied, two
cases exist:
• If tasks of ξ
ψ
h
= ξ
ψ
h
new
∪ ξ
old
are feasible, then no
reaction should be done by the agent
• Otherwise, the agent should provide different so-
lutions for users in order to re-obtain the system’s
feasibility. We define the following such services
First Step
the agent tries to modify the execution times of tasks
belonging to ξ
ψ
h
new
in order to meet all deadlines that
correspond to tasks of ξ
ψ
h
,
Iterative Second Step
the agent tries to consider old tasks of ξ
old
as new
tasks to be introduced in ξ
ψ
h
new
. A computation of
WCET of these tasks with the new tasks is applied
for each reconfiguration scenario ψ
h
.
Third Step
the agent tries to migrate some tasks of ξ
ψ
h
= ξ
ψ
h
new
∪
ξ
old
from their current processors to be scheduled in
other ones which belong to their inclusion group. The
inclusion group of each task is formed by a group of
processors in which this task can be scheduled. When
a task can’t be scheduled in a list of processors, this
group is called exclusion group. This technique is
applied in the migration scenario ψ
h
.
2.2 Feasibility Analysis for Tasks
By considering real-time tasks, the schedulability
analysis should be done in each processor in an appro-
priate Hyper-Period. According to (Brocal V., 2011),
a hyper-period is defined as HP = [ζ, 2 ∗ LCM + ζ],
where LCM
ψ
h
is the well-known Least Common Mul-
tiple of periods for each reconfiguration scenario ψ
h
of all the tasks that composed the system ξ
ψ
h
and
(ζ
p,ψ
h
) is the largest task offset of all tasks τ
p,ψ
h
k
for
each reconfiguration scenario ψ
h
on each processor p.
Let m + n be the number of tasks respectively in ξ
old
and ξ
ψ
h
new
. By assuming an unfeasible system at time
t
1
, and each processor p will execute its local tasks by
using EDF. So, according to (Mok, 1983), the follow-
ing formula is satisfied:
∑
m+n
i=1
C
ψ
h
i
T
ψ
h
i
should be > K, where K is the number of
identical processors.
Our proposed algorithm provides guarantees for both
old and new tasks in each processor p if and only if,
∑
n
1
− j
i=1
C
p,ψ
h
i
T
p,ψ
h
i
+
∑
n
1
+n
2
i=n
1
− j+1
C
p,ψ
h
i
T
p,ψ
h
i
≤ 1
where
∑
n
1
− j
i=1
C
p,ψ
h
i
T
p,ψ
h
i
denotes the sum of utilization factor of
n
1
old tasks in the processor p for each reconfigura-
tion scenario ψ
h
and,
∑
n
1
+n
2
i=n
1
− j+1
C
p,ψ
h
i
T
p,ψ
h
i
denotes the sum of utilization factor
of new arrival n
2
tasks in the processor p for each re-
configuration scenario ψ
h
.
2.3 Contribution: Agent-based
Real-time Reconfigurable Model
Our main contribution is the efficient schedu-
lability algorithm of multiprocessor real-time
tasks implementing reconfigurable multiprocessor
embedded systems. By applying a preemptive
scheduling, the assumed system is characterized
by tasks such that each one is defined by a tuple
(S
i
;C
i
;D
i
;T
i
;inclusion;exclusion). A system is called
asynchronous, if its tasks have offsets and are not
simultaneously ready. Note that in synchronous
systems, all offsets are zero (all tasks are released at
time t = 0).
Formalization
We propose for each reconfiguration scenario ψ
h
a new expression for the hyper-period hp in the
processor p by HP = [ζ, 2 ∗ LCM + ζ]. Let n
p,ψ
h
= n
p,ψ
h
1
+ n
p,ψ
h
2
be the number of periodic tasks in
Current
p,ψ
h
Γ
(t) for each reconfiguration scenario ψ
h
.
2.3.1 Agent’s Principal
Let Γ
p,ψ
h
be the set of all possible tasks that can
implement the system in the processor p for each
reconfiguration scenario ψ
h
, and let us denote by
Current
p,ψ
h
Γ
(t) the current set of periodic tasks im-
plementing the system at time t. By considering a
feasible system Γ
p
before the application of the re-
configuration scenario ψ
h
, each one of the tasks of
ξ
p
old
is feasible, e.g. the execution of each instance
is finished before the corresponding deadline. In this
case, we note that Feasibility(Current
p
Γ
(t)) ≡ True.
An embedded system can be dynamically reconfig-
ured at run-time by changing its implementation to
delete old or to add new real-time tasks. We denote in
this research by ξ
new
a list of new tasks to be added to
Current
p
Γ
(t) after a particular reconfiguration scenario
ψ
h
. In this case, the intelligent agent should check the
Real-timeReconfigurableSchedulingofAperiodicOSTasksonMultiprocessorSystems
45
system’s feasibility that can be affected when tasks vi-
olate corresponding deadlines, and should be able to
propose technical solutions for users.
Now, we apply at time t a dynamic reconfiguration
scenario ψ
h
in order to adapt the system’s behavior to
guarantee the system’s feasibility which depends on
two major goals of the reconfiguration: Consequently,
the task τ
p,ψ
h
k
can violate also its relative (correspond-
ing) deadline and all the system Current
p,ψ
h
Γ
(t) will
be unfeasible at time t. In this case the following for-
mula is satisfied for each reconfiguration scenario ψ
h
:
∑
n
p,ψ
h
i=1
C
p,ψ
h
i
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
> 1
• The first major goal to control the problem’s com-
plexity is to minimize the response time of tasks
of Current
p,ψ
h
Γ
(t) = ξ
p,ψ
h
new
∪ ξ
p
old
, then the agent
will not modify the ξ
old
tasks and should provide
different solutions for users by reconfiguring only
ξ
p,ψ
h
new
which is composed by n
p,ψ
h
2
tasks in order to
satisfy functional requirements,
• The second major goal of obtaining the sys-
tem’s feasibility is to meet deadlines of periodic
tasks. Then, the agent should react by updating
the global system Current
p,ψ
h
Γ
(t) = ξ
p,ψ
h
new
∪ ξ
p
old
,
which is composed by n
p,ψ
h
1
and n
p,ψ
h
2
periodic
tasks in order to re-obtain the system’s feasibility
and provides different solutions for users.
2.3.2 Meeting Deadlines of Periodic Tasks
• Solution 1: Modification of Worst Case
Execution Times
The agent proceeds as a first solution to modify the
Worst Case Execution Times (WCET) of tasks of
ξ
p,ψ
h
new
and ξ
p
old
in the processor p for each reconfigu-
ration scenario ψ
h
. To obtain a feasible system, the
following formula should be satisfied:
∑
n
p,ψ
h
1
− j
i=1
C
p,ψ
h
i
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
+
∑
n
p,ψ
h
2
+n
p,ψ
h
1
i=n
p,ψ
h
1
− j+1
C
p,ψ
h
i
+α
p,ψ
h
i
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
= 1 based on the
(Layland J., 1973) theorem.
−→
∑
n
p,ψ
h
2
+n
p,ψ
h
1
i=n
p,ψ
h
1
− j+1
C
p,ψ
h
i
+α
p,ψ
h
i
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
= 1 −
∑
n
p,ψ
h
1
− j
i=1
C
p,ψ
h
i
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
−→
∑
n
p,ψ
h
2
+n
p,ψ
h
1
i=n
p,ψ
h
1
− j+1
α
p,ψ
h
i
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
= 1 −
∑
n
p,ψ
h
1
− j
i=1
C
p,ψ
h
i
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
−
∑
n
p,ψ
h
2
+n
p,ψ
h
1
i=n
p,ψ
h
1
− j+1
C
p,ψ
h
i
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
−→
∑
n
p,ψ
h
2
+n
p,ψ
h
1
i=n
p,ψ
h
1
− j+1
α
p,ψ
h
i
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
=
1 −
∑
n
p,ψ
h
2
+n
p,ψ
h
1
i=1
C
p,ψ
h
i
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
Let γ
p,ψ
h
j
be the following constant: γ
p,ψ
h
j
= α
p,ψ
h
i
= Constant,
−→ γ
p,ψ
h
j
= ⌈
1−
∑
n
p,ψ
h
2
+n
p,ψ
h
1
i=1
C
p,ψ
h
i
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
∑
n
p,ψ
h
2
+n
p,ψ
h
1
i
=
n
p,ψ
h
1
− j+1
1
min(T
p,ψ
h
i
,D
p,ψ
h
i
)
⌉ = constant
The new WCET of Γ
p,ψ
h
tasks in the processor
p for each reconfiguration scenario ψ
h
is therefore
deduced from γ
p,ψ
h
j
.
• Solution 2: Migration of Tasks
The agent proceeds now as a second solution to
migrate some tasks of ξ
p,ψ
h
new
and ξ
p
old
in the processor
p for each reconfiguration scenario ψ
h
. Indeed, the
agent is responsible for allocating the tasks to the K
computing processors in a good way. In order to react
to varying run-time conditions, the system feasibility
requires homogeneous task migration capabilities.
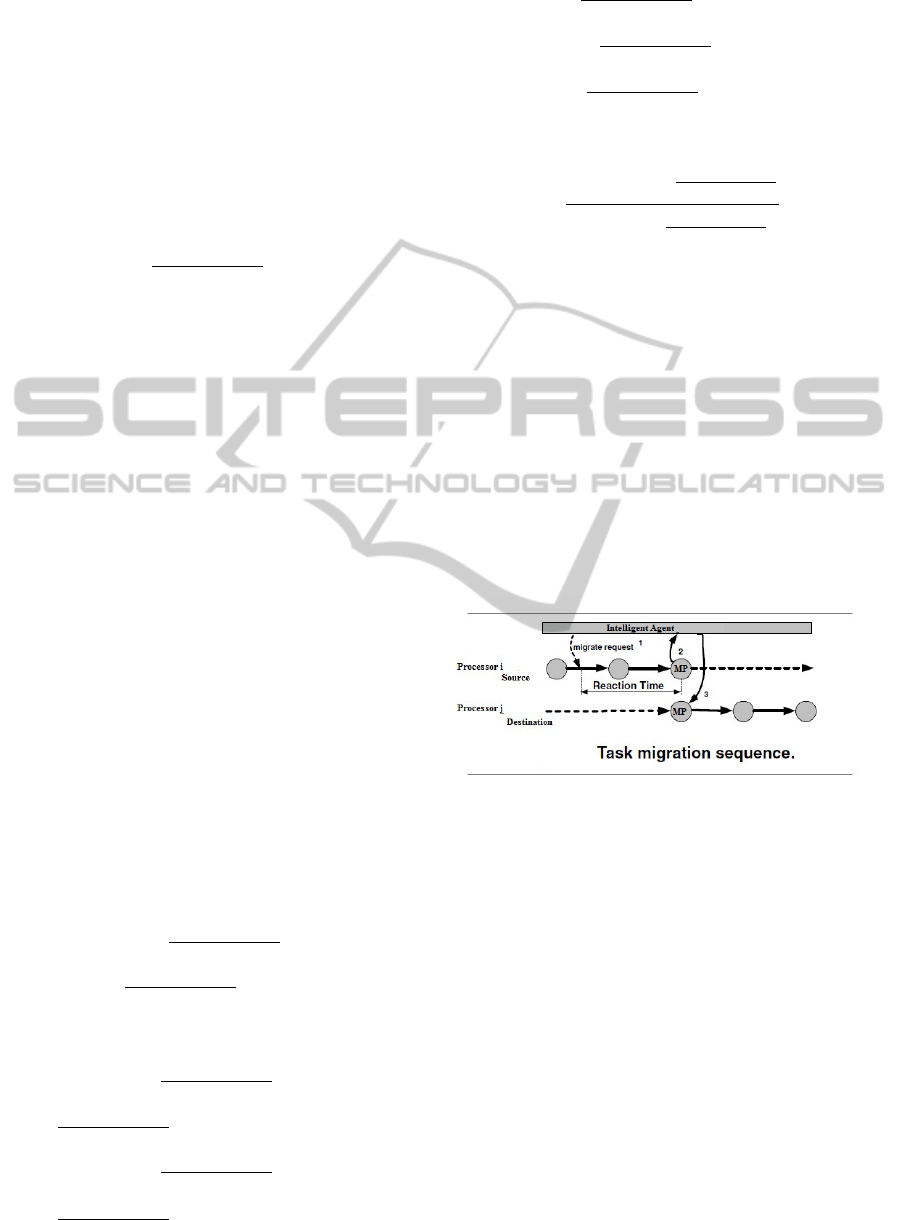
Run-time task migration can be defined as the
Figure 1: Processor Utilization.
relocation of an executing task from its current
location, the source processor i, to a new location,
the destination processor j, (i ̸= j; i,j = 1..K). This
allows the OS to e.g. minimize energy savings and
response time of the whole system. It also enables
processors management by moving tasks away from
processors with a high amount of workload or which
have their utilization factors > 1. In order to relocate
a task, the intelligent agent notifies the task by
means of a migration request signal
(1)
. Whenever
that signaled task reaches a migration point (MP), it
checks if there is a pending migration request or the
destination processor j belongs to the exclusion group
of the current migrated task for each reconfiguration
scenario ψ
h
. In such case of these two reasons, all the
relevant state information of that migration point is
transferred to the intelligent agent
(2)
. Consequently,
the intelligent agent will instantiate the same task on a
ICSOFT-PT2014-9thInternationalConferenceonSoftwareParadigmTrends
46

different processor. The new task instantiation will be
initialized by using the state information previously
captured by the intelligent agent
(3)
. Finally, the task
resumes execution at the corresponding migration
point (MP).
One of the main issues in homogeneous (we suppose
before that all the processors are identical) task
migration is the overhead incurred by checking for a
pending migration request during normal execution
(i.e. when there is no pending migration request).
Especially since a task requires frequent migration
points in order to reduce the reaction time. The
reaction time (Figure 1) is the time elapsed between
selecting a task for migration and the selected
task reaching the next migration point. In order
to minimize the checking overhead during normal
execution, further denoted as migration initiation, we
propose a novel technique for the new generation of
embedded systems. This novel technique uses the
inclusion and exclusion groups information of each
task for each reconfiguration scenario ψ
h
in order to
reduce the area search feasibility of such systems and
to minimize the reaction time and consequently the
response time will be minimized too.
Final Conclusion.
In conclusion, we can deduce that by arrival of ξ
ψ
h
new
tasks at run-time, the following formula is satisfied
for each reconfiguration scenario ψ
h
:
∑
(m+n)
ψ
h
i=1
C
ψ
h
i
T
ψ
h
i
> K, where K is the number of
identical processors.
Then, after the reconfiguration scenario ψ
h
was ap-
plied at run-time to the whole system by the intelli-
gent agent, our proposed algorithm provides guaran-
tees to both old and new tasks if and only if, we have
in each processor p for each reconfiguration scenario
ψ
h
:
∑
(m+n)
(p,ψ
h
)
i=1
C
(p,ψ
h
)
i
T
(p,ψ
h
)
i
≤ 1, in each processor p for each
reconfiguration scenario ψ
h
, (sufficient condition).
Moreover, we have calculated R
(p,ψ
h
)
opt
k
= min(R
(p,ψ
h
)
k,1
and R
(p,ψ
h
)
k,2
); so we obtain also:
∑
(m+n)
(p,ψ
h
)
i=1
C
(p,ψ
h
)
i
T
(p,ψ
h
)
i
< 1, in each processor p for each
reconfiguration scenario
ψ
h
with 1 ≤ p ≤ K, 1 ≤ h ≤ M. We can observe that
our proposed approach provides an efficient or near-
optimal global scheduling algorithm which schedules
tasks according to EDF in each processor p for each
reconfiguration scenario ψ
h
. All tasks meet their
deadlines after a reconfiguration scenario ψ
h
was ap-
plied at run-time. We can also observe, that our pro-
posed algorithm selects tasks to migrate from one pro-
cessor source i to another processor destination j in
an optimal way such that overall utilization of task
set is minimum. Parameters of tasks i.e., period,
deadline and worst case execution time, are gener-
ated randomly. We have illustrated that our proposed
algorithm outperforms other scheduling multiproces-
sor algorithms and a number of scheduling events are
much lower than appearing in others.
3 EXPERIMENTATION RESULTS
In this section, we analyze the performance of our
proposed approach for both periodic synchronous and
asynchronous tasks. The simulation runs on our tool
RT-Reconfiguration and proven by the real-time sim-
ulator Cheddar (Singhoff L.M.F., 2004) with a task set
composed of old tasks (ξ
p,ψ
h
old
) and new tasks (ξ
p,ψ
h
new
) in
the processor p for each reconfiguration scenario ψ
h
.
We illustrate this experimentation with a simplified
example. The task set considered for this example is
given in table 1 and it is composed now of 10 tasks.
The sum of utilization of all tasks is given in table
1 and is equal to 426.1%. In table 1, the first col-
umn represents the task identifier, the second column
represents the worst case execution time (WCET), the
third column represents the period and the fourth col-
umn represents the deadline of each task which is less
or equal to the period in this example of real time
tasks.
Table 1: Task Parameters.
Task C
i
T
i
D
i
τ
1
2 9 7
τ
2
3 21 20
τ
3
2 9 9
τ
4
2 13 10
τ
5
3 15 9
τ
6
14 21 19
τ
7
10 24 16
τ
8
8 18 18
τ
9
13 16 17
τ
10
5 11 12
We have 3 identical processors in our system to
schedule these tasks. In this case, we assume that
each task’s deadline is less or equal to its period. The
worst case execution times, deadlines, and the time
periods of all tasks are generated randomly.
In this experiment, our task set example is ini-
tially implemented by 5 characterized old tasks
(ξ
old
= {τ
1
; τ
2
; τ
3
; τ
4
; τ
5
}). These tasks are feasible
Real-timeReconfigurableSchedulingofAperiodicOSTasksonMultiprocessorSystems
47

because the processor utilization factor U = 1.19
≤ 3. These tasks should meet all required deadlines
defined in user requirements and we have
Feasibility(Current
ξ
old
(t)) ≡ True.
Firstly, tasks are partitioned; task τ
1
is executed on
first processor, τ
2
and τ
3
are executed on processor 2
while task τ
4
and τ
5
are executed on processor 3. We
have three sets of local tasks. As there is only one
task on first processor then task τ
1
utilization factor
is the same as the first processor utilization factor
( utilization factor = 0.285 ≤ 1) while utilization
factors of processor 2 and processor 3 are calculated
as follows:
U
2
=
∑
(2)
2
i=1
C
2
i
T
2
i
= 0.372 < 1,
U
3
=
∑
(2)
3
i=1
C
3
i
T
3
i
= 0.533 < 1,
We suppose that a first reconfiguration scenario
ψ
1
(h = 1) is applied at time t1 to add 5 new tasks
ξ
ψ
1
new
= {τ
6
; τ
7
; τ
8
; τ
9
; τ
10
}. The new processor
utilization becomes U
ψ
1
= 4.261 > 3 time units.
Therefore the system is unfeasible.
Feasibility(Current
ψ
1
ξ
(t1)) ≡ False.
Indeed, if the number of tasks increases, then the
overload of the system increases too.
We apply our contribution to this running example
and we could observe that the recalculation points of
the utilization factor, when parameters of new tasks
are modified, decreases and becomes less or equal to
1 and we can deduce that the system is now feasible.
Moreover, if the number of solutions presented
by the intelligent agent to the user increases, then
chances of executing more new added tasks increase
and the performance of the real-time scheduling
is more efficient. This is due to the fact that the
reconfiguration issues are increased, the user selects
the best solution which gives the minimum utilization
factor of the system, ameliorates the response time
and hence the chances of executing more new tasks
are increased as well.
These results were suggested by the tool RT-
Reconfiguration and give a feasible system which is
proven also by Cheddar (Singhoff L.M.F., 2004).
4 CONCLUSION
In this paper, we study the functional feasibility in
multiprocessor systems with a shared memory. We
proposed an efficient scheduling algorithm to opti-
mize response time while ensuring that all periodic
tasks meet their deadlines with partitioning schedul-
ing and to accept as many tasks as possible. Further-
more, with this efficient solution, these tasks can be
guaranteed to meet their deadlines after a reconfigu-
ration scenario ψ
h
and were applied by an efficient
EDF based scheduling algorithm on multiprocessor
system. We assume that our proposed algorithm uses
an independent task sets in order to minimize the in-
teraction between tasks to limit the number of mes-
sages transmitted and overloads conditions. Finally,
we verify also, the correctness of the whole system
with minimizations of response times.
REFERENCES
Brocal V., BalbastreP., B. R. R. L. (2011). Task period se-
lection to minimize hyperperiod, Emerging Technolo-
gies & Factory Automation (ETFA), IEEE conference
on, pp.1-4, 2011. doi: 10.1109/ETFA.2011.6059178,
Toulouse, France, 16th edition.
Gharbi, A., Khalgui, M., and Ahmed, S. B. (2010). Inter-
agent communication protocol for distributed recon-
figurable control software components. Ant 2010.
Khalgui, M. (2010). Nces-based modelling and ctl-based
verification of reconfigurable embedded control sys-
tems. Computers in Industry, Vol.61, N.3.
Layland J., Liu, C. (1973). Scheduling algorithms for mul-
tiprogramming in a hard-real-time environment. Jour-
nal of the ACM, 20(1):46-61.
Mok, A. K. (1983). Fundamental design problems of dis-
tributed systems for the hard real time environment.
PhD Dissertation, MIT, May.
Singhoff L.M.F., Legrand, J. (2004). Cheddar : a flexible
real time scheduling framework. ACM SIGAda Ada
Letters, volume 24, number 4, pages 1-8. Edited by
ACM Press, ISSN:1094-3641.
ICSOFT-PT2014-9thInternationalConferenceonSoftwareParadigmTrends
48
