
Testing the Cooperation of Autonomous Robotic Agents
Raimar Lill and Francesca Saglietti
Informatik 11 - Software Engineering, Friedrich-Alexander-Universität Erlangen-Nürnberg,
Martensstr. 3, 91058 Erlangen, Germany
Keywords: Autonomous Systems, Coloured Petri Nets, Genetic Algorithms, Optimized Test Case Generation,
Structural Testing.
Abstract: This article proposes an approach to testing the cooperative behaviour of autonomous software-based agents
with safety-relevant tasks. It includes the definition of different model-based testing criteria based on the
coverage of Coloured Petri Net entities as well as the automatic generation of appropriate test cases. The
multi-objective optimization problem considered addresses both the maximization of interaction coverage
and the minimization of the amount of test cases required. The approach developed for its solution makes
use of genetic algorithms. The resulting automatic test case generation process is presented in this article
together with the experiences gained by applying it to cooperating autonomous forklifts.
1 INTRODUCTION
1.1 Motivation
Modern software-based applications increasingly
rely on de-centralized functionalities distributed
among entities. While classical component-based
software usually involves behavioural synchronicity,
however, autonomously cooperating agents are
conceived to take individual decisions on the basis
of their local sensorial perception and reasoning
capabilities (Saglietti, Söhnlein and Lill, 2011).
Typical application domains addressed by
autonomous cooperation include mobile robots or
traffic control based on car-to-car communication.
Evidently, local decisional autonomy and shared
cooperative tasks allow for higher flexibility and
performance than central controllers; on the other
hand, the resulting global behaviour induced by
autonomous decisions involves also a much higher
variety of potential interaction scenarios. In
particular, this multiplicity poses serious challenges
to verification, as compositional testing or proving
techniques relying on separation of concerns cannot
be taken to provide adequate evidence any longer.
In fact, the potential failure behaviour of
autonomous cooperative robots goes beyond the
possibility of incorrect performance of one entity
including also inappropriate decision-making due to
inaccurate perception instruments, inadequate
interpretation of signals perceived, incorrect
identification of actions required or inconsistence
between decisions of cooperating agents.
Therefore, in order to improve the state-of-the-
art, a model-based approach for testing cooperating
autonomous systems was developed within the
European ARTEMIS project R3-COP. It aims at
capturing the inherent interaction multiplicity by an
appropriate modelling notation, from which to
derive representative test cases. In more detail, the
approach developed is based on the following steps:
modelling of the behaviour of a cooperating
autonomous system;
definition of adequate coverage criteria based on
the modelling elements of the notation chosen;
automatic generation of model-based test cases
achieving given coverage criteria.
The test data generation process follows a multi-
objective optimization strategy based on genetic
algorithms (Mitchell, 1996): in fact, it aims at
maximizing test coverage while minimizing the
number of tests involved.
After addressing related work in the next section,
the rest of the article is structured as follows:
chapter 2 briefly outlines the benefits of using
Coloured Petri Nets (CPNs) for the purpose of
modelling cooperating autonomous systems;
furthermore, objectively reproducible coverage
criteria based on CPN modelling elements are
presented and hierarchically organized;
287
Lill R. and Saglietti F..
Testing the Cooperation of Autonomous Robotic Agents.
DOI: 10.5220/0004990402870296
In Proceedings of the 9th International Conference on Software Engineering and Applications (ICSOFT-EA-2014), pages 287-296
ISBN: 978-989-758-036-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

chapter 3 proposes an incremental testing
procedure consisting of successive testing phases
characterized by gradually increasing levels of
contextual detail;
chapter 4 is devoted to the automatic generation
of optimized CPN-based tests by means of 2
different optimization strategies: the former
addresses conflicting objectives by pre-defined
target priorities (section 4.1), while the latter one
allows to capture varying target priorities by
moving along a whole Pareto front (section 4.2);
finally, chapter 5 illustrates the practicability of
the technique developed in the light of an
example inspired by a real-world application
involving cooperating forklifts.
1.2 Related Work
The approach presented in this article is based on the
classical concept of model-based testing (e.g. Utting
and Legeard, 2007; Broy et al., 2005) allowing for
the extraction of significant test cases from
dedicated behavioural and environmental models. In
order to capture the behaviour of cooperating
autonomous systems, it makes use of the modelling
language CPNs (Jensen and Kristensen, 2009). The
coverage criteria proposed in section 2.2 were partly
inspired by already existing coverage concepts (Zhu
and He, 2002) for Predicate-Transition Petri Nets
(Genrich and Lautenbach, 1981). For the purpose of
automatic test case generation, they were transferred
to CPNs giving rise to appropriate metrics for the
evaluation of the fitness of candidate test case sets.
Alternative approaches (Nguyen et al., 2012) and
(Micskei et al., 2012) were also devoted to the
automatic generation of test cases for autonomous
software agents by means of evolutionary
techniques. They differ, however, from the target
pursued in the present article by focusing on testing
for robustness in terms of aiming at the generation of
exceptional test scenarios, e.g. involving unusually
high stress, human misuse, communication
anomalies, behavioural extremes etc. Such
approaches assume the previous identification of
anomalous behaviour; this may be hard to be
achieved in general, especially in case of numerous
interacting agents. In addition, they do neither
address the global amount of behavioural
multiplicity captured by interacting autonomous
systems, nor the amount of testing required; both
these objectives, on the other hand, are pursued by
the technique developed in this article.
2 MODEL-BASED TESTING
USING CPNS
2.1 CPNs for Modelling Autonomous
Cooperating Agents
In order to capture the high behavioural multiplicity
of interaction scenarios arising from autonomous
cooperation, an adequate modelling notation is
required. Coloured Petri Nets (Jensen and
Kristensen, 2009) have proven to be particularly
useful for this purpose thanks to their capability of
providing a compact and scalable representation
(Lill and Saglietti, 2012a).
Classical Petri Nets are well-known techniques
for modelling and analyzing concurrent processes, in
particular capturing their cooperative behaviour as
well as potential conflicts. CPNs result by enriching
the tokens of ordinary Place/Transition Petri Nets
(Murata, 1989) with type-specific data values
(colours). For this purpose, each CPN place is
assigned a colour set specifying the type of tokens
that may be allocated to that place. At any time, the
net marking defines the current state.
In order to control the production and
consumption of coloured tokens, CPN arcs are
assigned dedicated arc expressions determining a
multi-set of coloured tokens to be produced resp.
consumed during transition firings. In order for a
transition to fire, each variable occurring in its input
arc expressions has to be bound to a specific colour
such that a sufficient number of tokens of that colour
(determined by evaluating each input arc expression)
is available in the corresponding input place. The
firing of a transition w.r.t. an enabling variable
binding is denoted as an event. Each event leads first
to the consumption of tokens in each input place of
the transition in amounts and colours as indicated by
evaluating the corresponding input arc expression.
After the firing, tokens are produced in output places
in amounts and colours as indicated by evaluating
corresponding output arc expressions of the
transition. Transition guards may further restrict the
firing of a transition by requiring the fulfilment of
given conditions.
The sound mathematical basis on which CPNs
are based allows for the use of formal analysis
techniques (Jensen and Kristensen, 2009).
Furthermore, dedicated tools support step-wise
simulation and state space analysis (Jensen,
Kristensen and Wells, 2007; Westergaard and
Kristensen, 2009). While sharing with classical Petri
Nets the benefit of providing an intuitively appealing
visualization of complex processes, CPNs offer
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
288

additional advantages by supporting full expressive
power thanks to the concept of coloured tokens and
net annotations in SML (Milner et al., 1997). By
permitting to encapsulate data information within
the type-specific tokens, CPNs can be easily adapted
to meet application-specific requirements without
needing to change the underlying net layout, hereby
supporting compactness and scalability. Further
extensions of CPNs also support hierarchical design
and timely aspects (Jensen and Kristensen, 2009).
2.2 Hierarchy of CPN-based Coverage
Criteria
In the following, a CPN-based test case is defined to
be a pair consisting of an initial CPN state and of a
finite sequence of CPN events. For the purpose of
providing objectively reproducible test stopping
rules based on measurable test targets, the following
cooperation-tailored coverage criteria were
introduced in (Lill and Saglietti, 2012b) on the basis
of CPN model entities (i.e. transitions, events and
states) to be covered during testing.
Transition-based Coverage Criteria address
the verification of generic, though non-trivial system
functionality of robots (e.g. basic motor activities or
self-localization). By limiting the testing scenarios to
the mere transition level, the multiplicity of data
flow is deliberately kept out of the testing scope by
focusing on one single action instance. Testing
criteria addressing this relatively coarse level of
abstraction include the “all transitions”- criterion
demanding the activation of each single transition,
the “all transition pairs”- criterion demanding in
addition also the triggering of all possible pairs of
transitions, as well as the “all transition sequences”-
criterion extending the previous criteria to include
the firing of any possible sequence of transitions.
Event-based Coverage Criteria go beyond
single generic transitions by explicitly addressing
the whole variety of possible action instances (e.g.
varying robot movement scenarios under different
terrain conditions). By focusing on event
occurrences, the underlying data flow multiplicity -
including the amount and the colours of tokens - is
intentionally integrated into the testing scope.
Coverage criteria addressing this finer level of
abstraction include the “all events”- criterion
demanding the occurrence of every event, the “all
event pairs”- criterion demanding in addition also
the occurrence of any possible pair of events, as well
as the “all event sequences”- criterion extending the
previous criteria to include the occurrence of any
possible sequence of events.
State-based coverage criteria, on the other
hand, enrich the accuracy of test observations by
distinguishing between different operational
conditions present before and after event
occurrences, such as potential mid- or long-term
interferences with other robots or obstacles. In
terms of model entities, this is captured by
addressing different token amounts and colours
between and after action instances. Coverage criteria
at this particularly fine level of detail are the “all
states”- criterion demanding the traversal of every
state, the “all state pairs”- criterion demanding in
addition the traversal of any possible pair of
successive states, as well as the “all state
sequences”- criterion extending the previous criteria
to include the traversal of any possible sequence of
states.
As event-based and state-based coverage criteria
require the construction of the underlying CPN state
space graph, the test case generation may be limited
by state space explosion (Valmari, 1998). This
problem, however, may be partly circumvented by
the following strategies (Pelánek, 2009):
using parallel or distributed computing for
calculating the state space graph;
reducing the state space, e.g. by addressing a
higher degree of abstraction or by restricting the
model parameters to tractable dimensions
considered as acceptable for testing purposes;
restricting the coverage targets to operationally
relevant portions of the state space.
Under the realistic assumption that all CPN
transitions are connected by arcs, all guards are
satisfiable and every state can be reached from
another state via at most one event, under a given
initial marking the causal implications between the
coverage criteria introduced above are illustrated by
the subsumption hierarchy shown in Figure 1 (Lill
and Saglietti, 2012b).
3 INCREMENTAL STRUCTURAL
TESTING
In analogy to conventional structural software
testing, the scope of the testing object may be step-
wise enriched by growing amounts of contextual
details. In fact, the hierarchy shown in Figure 1
highlights the increasing refinement from generic
actions (bottom level) via specific action instances
TestingtheCooperationofAutonomousRoboticAgents
289

allstate
sequences
allstate
pairs
all
states
allevent
sequences
allevent
pairs
all
events
alltransition
sequences
alltransition
pairs
all
transitions
Figure 1: Subsumption hierarchy of CPN-based coverage criteria.
(intermediate level) to action instances involving
different operational pre- and post-conditions (top
level). Based on this concept the following structural
testing phases for cooperating autonomous systems
are proposed:
1. local test of context-free actions represented by
CPN transitions, intended to verify generic, but
non-trivial robot functionalities like basic motor
activities by robots or self-localization
functionalities by sensors.
2. local test of context-specific actions
represented by CPN events; after that, the
second testing phase extends the testing scope
to the coverage of specific action instances. For
example, motor activities should be tested on
different terrain conditions (e.g. varying grip or
slope) and self-localization should take place in
different environments (e.g. outdoor or in a
closed factory room).
3. global test of contextual system behavior
represented by CPN state pairs. Therefore, a
third phase also takes into account global
system states encountered before and after event
occurrences. For example, the actions of mobile
robots could be affected by weather conditions,
battery status or the interference of other robots
or obstacles. Post-conditions encountered after
event occurrences may often lead to further
conflicts (e.g. robots blocking each other). This
may be exploited for the prolongation of test
cases in order to capture these situations.
While these structural testing phases can
systematically support preliminary verification
activities aimed at fault detection, they evidently do
not allow for the quantitative assessment of
operational reliability, as they exclusively address
structural coverage ignoring issues like frequency of
occurrence or criticality of events. Therefore, if
required, these phases should be completed by
reliability testing based on an operationally
representative usage profile.
4 OPTIMIZED TEST CASE
GENERATION
Automatic model-based test case generation pursues
two main objectives:
a fault detection benefit achieved by maximizing
interaction coverage;
an economic benefit achieved by minimizing the
amount of test cases.
In general, these objectives are conflicting, as
higher coverage usually demands for more test
cases. The underlying multi-objective optimization
problem is approached by evolutionary techniques
(Freitas, 2002). Inspired by Darwinian evolution
theory, they rely on the successive improvement of
solution candidates by genetic operators (s. Figure
2).
In the context of CPN-based testing, each
individual within a given population is intended to
represent a candidate set of test cases, where test
cases are referred to as genes.
After a starting population is randomly
generated, each of its individuals is evaluated in
terms of its achievement of the objectives by a so-
called fitness function. The following operators are
then applied for the purpose of generating a
subsequent population of given size.
The elitism operator transfers a fixed percentage
of the population consisting of the best-fitted
individuals unaltered to the successive population.
Furthermore, all individuals are considered for
recombination where the recombination process is
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
290

based on a selection operator repeatedly choosing
pairs of individuals according to given strategies and
on a crossover operator recombining them to build
two new individuals. In order to reduce the risk of
worsening very fit individuals by recombination, a
fixed percentage of the elite skips this phase and
directly proceeds to the successive mutation
operator. Two crossover operators were defined and
implemented:
uniform crossover: exchange of test cases
between selected individuals; for each test case
of an individual, the probability of being
transferred to the other is decreasing with
coverage progress in order to avoid weakening
very good individuals towards the end of the
optimization procedure;
cut & glue: recombination of two single test
cases from selected individuals by randomly
splitting each of them into two parts in such a
way that processing both initial parts results in a
common state; the sequential endings of both test
cases are then interchanged resulting in two
different and meaningful test cases.
In order to increase genetic diversity, test cases
building the new population may be successively
subject to mutation operators, at an operator-specific
probability depending on the coverage progress
currently achieved. The intention is to take into
account the varying need for further genetic material
throughout the generation process, tending to
increase this material at the beginning while
reducing it towards the end. In more detail, the
mutation operators applied are the following:
the add operator (abbr. by a) inserts a randomly
generated new test case;
the delete operator (abbr. by d) removes a
randomly chosen test case;
the replace operator (abbr. by r) concatenates the
delete and add operator;
the modification operator (abbr. by m) alters a
test case by replacing its events (starting from
randomly chosen intermediate state) with
potential randomly chosen alternative events up
to a pre-defined test case length resp. up to the
reaching of a final state.
In order to prevent the loss of precious genetic
material during evolution, for each entity a set of test
cases covering it is stored in a so-called gene pool
from which the add operator may successively
access for re-insertion.
The algorithm continues as long as no individual
candidate fulfils given stopping criteria, e.g. in case
a minimum fitness value is achieved or the number
of iterations exceeds a certain limit.
4.1 Weight-based Optimization
For calculating the fitness of each individual, a
fitness function has to be specified. One test case
generation technique involves the definition of
dedicated weights for each mission objective.
Stopping‐
criteria
fulfilled?
yes
no
Crossover
Populationi+1
Individual
Mutation
Populationi
Elitism
Selection +Crossover
Mutation
Outputof best result
Evaluation(Fitness)
Initialization
Figure 2: Genetic operators (left) and scheme of a genetic algorithm (right).
TestingtheCooperationofAutonomousRoboticAgents
291

The fitness of each individual ts is based on two
measures capturing the achievement of both
objectives.
The degree of fulfilment of the first objective
(coverage maximization) is evaluated by the relative
coverage c(ts) achieved by a test case set ts:
On the other hand, the degree of fulfilment of the
second objective (test number minimization) is
evaluated by the following normalized value s(ts):
where
size
max
is the size of the largest test case set in the
current population;
size
min
is the size of the smallest test case set in
the current population;
size(ts) is the size of the test case set under
evaluation.
Evidently, the higher the value s(ts), the lower
the size of the corresponding test case set.
Depending on the relative priority of each
objective, the overall fitness of test case set ts is
evaluated by the following weighted sum:
where w
1
and w
2
are weights with w
1
+ w
2
= 1.
Before recombining individuals, a so-called
elitism operator transfers a fixed percentage of
individuals with best fitness values unaltered to the
following population ensuring that populations do
not degrade over time.
4.2 Pareto Optimization
Using weighted sums to determine fitness values has
the disadvantage that the tester is obliged to define
the objective weights before the optimization
procedure. An alternative solution not requiring any
a priori weights is offered by Pareto optimization
where a solution is called Pareto-optimal if no other
solution has a better rating with respect to all
objectives. A set of Pareto-optimal solutions is
referred to as a Pareto front.
In case of Pareto optimization, the generation
process no longer aims at achieving one best-fitted
solution, but rather a Pareto front offering optimal
solution alternatives. The stopping rules of genetic
evolution must be adapted accordingly: the
algorithm terminates after reaching a maximum
number of iterations or as soon as the Pareto front is
stable, i.e. it is maintained unaltered for a pre-
defined number of iterations.
For assigning fitness values, the algorithm
proceeds by repeatedly extracting sets of non-
dominated individuals from the current population.
This results in a ranked sequence of Pareto fronts; all
individuals of the same front are then assigned the
same fitness value which decreases with the rank of
the front.
The elitism operator has to be adapted such that
the best Pareto front (i.e. the first-ranked set of non-
dominated individuals) is transferred unaltered to the
following population. In order to allow for a genetic
evolution, if the elite front consists of more than half
of the original population, the size of the next
population is increased such as to contain twice as
many individuals as the elite.
5 PRACTICAL APPLICATION
The model-based test generation process proposed
was applied to a CPN modelling the cooperation of
autonomous forklifts moving within a logistic
warehouse (s. Figure 3). In more detail, an arbitrary
number of robotic agents move along a narrow lane
consisting of an arbitrary number of discrete
segments.
The robots are assigned missions (transition next
order) by a central controller and aim at
accomplishing them as autonomously as possible.
If possible, robots proceed towards their
designated target segments by moving along the lane
(transitions forward resp. backward, depending on
their direction). In case they recognize passive
obstacles, they stop in order to avoid collisions.
Robots moving in different directions and
meeting each other cooperate by switching positions
(transition switching maneuver). If unable to access
a specific segment (e.g. due to a slow preceding
robot or a passive obstacle), robots raise an alarm
(transition traffic holdup) after 5 unsuccessful
attempts to access the segment. Successfully
completed missions are logged in the order of their
accomplishment (transition mission completed).
The two optimization strategies addressed in this
article have been implemented in the Java
framework Access/CPN (Westergaard and
Kristensen, 2009).
minmax
max
size size
size(ts) size
)s(ts
-
-
entities ofnumber total
by ts covered entities ofnumber
)c(ts
s(ts)wc(ts)w)fitness(ts
21
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
292

Figure 3: CPN model of cooperating forklifts.
TestingtheCooperationofAutonomousRoboticAgents
293
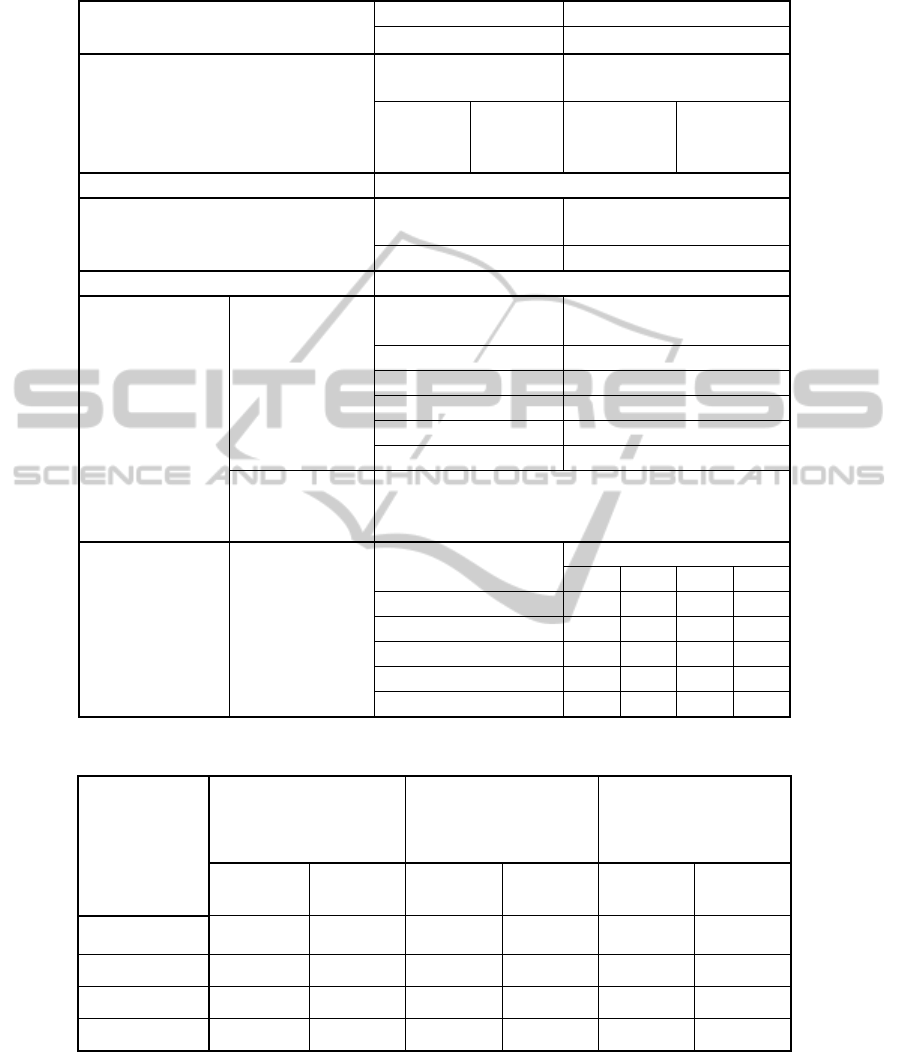
Table 1: Parameterization of the genetic algorithm.
initialization
population individual
10 individuals 1 test case
stopping criteria
weight-based
optimization
Pareto optimization
≤ 1000
iterations
fitness
= 1.0
≤ 1000
iterations
stable front
for 5
iterations
gene pool
≤ 5 genes per entity
elitism
weight-based
optimization
Pareto optimization
transfer rate 0.20 Pareto front
selection
roulette wheel
crossover
(apart from
10% of the
elite)
uniform
crossover at
probability
0.90
coverage exchange probability
[0.00 ; 0.25] 0.50
]0.25 ; 0.50] 0.40
]0.50 ; 0.75] 0.30
]0.75 ; 0.90] 0.20
]0.90 ; 1.00] 0.10
cut & glue at
probability
0.10
−
mutation
mutation
probability per
test case: 0.10
coverage
mutation operators
a d r m
[0.00 ; 0.25] 1.00 0.00 0.00 0.00
]0.25 ; 0.50] 0.80 0.10 0.05 0.05
]0.50 ; 0.75] 0.70 0.20 0.05 0.05
]0.75 ; 0.90] 0.60 0.30 0.05 0.05
]0.90 ; 1.00] 0.50 0.40 0.05 0.05
Table 2: Comparison of three test case generation techniques in terms of effort required.
coverage
criterion
no optimization
weight-based
optimization
w
1
= 0.99, w
2
=0.01
Pareto
optimization
(from 1st Pareto front)
average
size
std.
deviation
average
size
std.
deviation
average
size
std.
deviation
all transitions 1.3 0.48 1.4 0.52 1.5 0.53
all events 25.2 1.99 24.2 1.55 17.7 1.64
all states 106.2 4.54 76.9 4.86 63.2 5.94
all state pairs 177.3 3.89 138.9 8.84 143.5 10.96
The CPN was modelled using CPN Tools (Jensen,
Kristensen and Wells, 2007). The implemented
algorithm is parameterized as shown in Table 1.
For the purpose of comparing the different test
case generation strategies considered, an initial CPN
marking involving 3 robots moving on 5 segments
was chosen. The robots were assigned the following
missions:
Robot #1 is assigned the order of moving from
segment 1 to segment 4;
Robot #2 is assigned the order of moving from
segment 2 to segment 5;
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
294

Robot #3 is assigned the order of moving from
segment 5 to segment 1.
The example involves 6 transitions, 72 events,
261 states and 470 state pairs. In accordance with
the step-wise testing procedure proposed, the "all
transitions", "all events", "all states" and "all state
pairs" criteria were selected for the purpose of
capturing context-free, local context-specific and
global contextual behaviour. For each criterion 10
test case sets were generated, each achieving 100 %
coverage w.r.t. the specific underlying criterion.
Table 2 shows the average size of the test case
sets, as well as the standard deviation for each
experiment.
The results were also compared with non-
optimized test generation where test cases are
constructed such that after reaching a state all
potential events may occur at the same probability.
Although non-optimized test generation revealed to
be practicable for the weaker coverage criteria, the
stronger ones required a considerably higher amount
of test cases.
On the other hand, weight-based multi-objective
optimization was able to help save up to 28% of test
cases in comparison with non-optimized test
generation. Though practicable for complex systems,
it assumes that the objectives were prioritized in
advance. This requirement may reveal as a drawback
as the tester usually does not have any a priori
evidence about the practical implications of this
choice.
This drawback is overcome by Pareto
optimization allowing the tester to take an a
posteriori decision among a set of optimal
candidates. This may be particularly helpful when
100% coverage would require a too high amount of
test cases, such that the tester might prefer to opt for
a slightly lower coverage involving considerably
less test cases.
6 CONCLUSION
This article presented a CPN-based testing
procedure for cooperating autonomous software-
based agents. It relies on successive testing phases of
increasing contextual scope.
The testing techniques developed are considered
as particularly relevant for the purpose of verifying
and validating the cooperative behaviour of safety-
relevant controllers, each governing the behaviour of
an agent, as they allow to observe multiple scenarios
involving whole varieties of potential interactions.
For the purpose of generating optimized test case
sets evolutionary techniques revealed to be
particularly helpful in maximizing interaction
coverage while minimizing test amount. Two
optimized test generation procedures using genetic
algorithms were implemented and applied to a CPN
model of cooperating autonomous forklifts.
Compared with non-optimized test case generation
they proved to be beneficial in saving testing effort.
Furthermore, Pareto optimization allows for an a
posteriori adaptation of target priorities based on the
actual amount of test cases being required to achieve
given coverage criteria.
On the whole, the approach presented in this
article offers a systematic testing procedure for
cooperative autonomous systems intended to define
and to measure objective testing targets, as well as to
achieve them by a minimum number of
automatically generated test cases.
ACKNOWLEDGEMENTS
It is gratefully acknowledged that part of the work
reported was sponsored by the German Federal
Ministry of Education and Research BMBF
(Bundesministerium für Bildung und Forschung) in
cooperation with the European Union Research
Programme ARTEMIS (Advanced Research and
Technology for Embedded Intelligence and
Systems), project R3-COP (Resilient Reasoning
Robotic Co-operating Systems).
REFERENCES
Broy, M. et al., 2005. Model-Based Testing of Reactive
Systems - Advances Lectures. In Lecture Notes in
Computer Science, vol. 3472. Springer.
Freitas, A., 2002. Data Mining and Knowledge Discovery
with Evolutionary Algorithms. Springer.
Genrich, H. J., Lautenbach, K, 1981. System Modelling
with High-Level Petri Nets. In Theoretical Computer
Science, vol. 13(1), pp. 109-136. Elsevier.
Jensen, K., Kristensen, L. M.; Wells, L., 2007. Coloured
Petri Nets and CPN Tools for Modelling and
Validation of Concurrent Systems. In International
Journal on Software Tools for Technology Transfer,
vol. 9, no. 3-4, pp. 213-254. Springer.
Jensen, K., Kristensen, L. M., 2009. Coloured Petri Nets:
Modelling and Validation of Concurrent Systems.
Springer.
Lill, R., Saglietti, F., 2012a. Model-based Testing of
Autonomous Systems based on Coloured Petri Nets.
In ARCS 2012 Workshops Proceedings, Lecture Notes
TestingtheCooperationofAutonomousRoboticAgents
295

in Informatics, vol. 200, pp. 241-250. Gesellschaft für
Informatik.
Lill, R., Saglietti, F., 2012b. Test Coverage Criteria for
Autonomous Mobile Systems based on Coloured Petri
Nets. In FORMS/FORMAT 2012 Proceedings, 9th
Symposium on Formal Methods for Automation and
Safety in Railway and Automotive Systems, pp. 155-
162. Institut für Verkehrssicherheit und
Automatisierungstechnik, TU Braunschweig.
Micskei, Z. et al., 2012. Concept for Testing Robustness
and Safety of the Context-Aware Behaviour of
Autonomous Systems. In Proc. of the 1st Int.
Workshop on Trustworthy Multi-Agent Systems
(TruMAS), KES-AMSTA 2012, pp. 504-513.
Milner, R. et al., 1997. The Definition of Standard ML
(Revised). MIT Press.
Mitchell, M., 1996. An Introduction to Genetic
Algorithms. MIT Press.
Nguyen, C. D. et al., 2012. Evolutionary testing of
autonomous software agents. In Autonomous Agents
and Multi-Agent Systems, vol. 25(2), pp. 260-283.
Springer.
Murata, T., 1989. Petri Nets: Properties, Analysis and
Applications. In Proceedings of the IEEE, vol. 77, no.
4. pp. 542-543. IEEE.
Pelánek, R., 2009: Fighting state space explosion: Review
and evaluation; In Lecture Notes in Computer Science,
vol. 5596, pp. 37-52. Springer.
Saglietti, F., Söhnlein, S., Lill, R., 2011. Evolution of
Verification Techniques by Increasing Autonomy of
Cooperating Agents, In Autonomous Systems:
Developments and Trends, Studies in Computational
Intelligence, vol. 391, pp. 353-362. Springer.
Utting, M., Legeard, B., 2007. Practical Model-based
Testing - a Tools Approach. Elsevier.
Valmari, A., 1998. The state explosion problem. In
Lecture Notes in Computer Science, vol. 1491, pp.
429–528. Springer.
Westergaard, M., Kristensen, L. M., 2009. The
Access/CPN framework: a tool for interacting with the
CPN Tools simulator. In Applications and Theory of
Petri Nets, pp.313-322. Springer.
Zhu, H., He, X., 2002. A methodology of testing high-
level Petri nets. In Information and Software
Technology, Vol. 44, pp. 473-489. Elsevier.
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
296
