
Complex Patten Processing in Spatio-temporal Databases
∗
Yang Zheng, Annies Ductan, Devin Thomas and Mohamed Y. Eltabakh
Computer Science Department, Worcester Polytechnic Institute (WPI), Worcester, MA, U.S.A.
Keywords:
Spatio-temporal Query Processing, Pattern-matching Queries, GIS, Query Optimization.
Abstract:
The increasing complexity of spatio-temporal applications has caused the underlying queries to be more so-
phisticated and usually carry complex semantics. As a result, the traditional spatio-temporal query types, e.g.,
range, kNN, and aggregation queries, have become just building blocks in more complex query plans. In this
paper, we present the STEPQ system, which is an extensible spatio-temporal query engine for complex pattern
processing over spatio-temporal data. STEPQ enables full-fledged and optimized integration between spatio-
temporal queries and complex event processing (CEP). This integration enables expressing complex queries
that execute the desired application semantics without the need for indifferent middle-aware or application-
level support. The system is implemented using TerraLib module on top of PostgreSQL DBMSs. The experi-
mental evaluation demonstrates the feasibility and practicality of the STEPQ system, and the efficiency of the
proposed optimizations.
1 INTRODUCTION
Spatio-temporal data processing provides eminent
support for many application domains such as traf-
fic monitoring and transportation systems, geographic
information systems (GIS), location-based services
(LBS), and environmental science. As these applica-
tions get more complex, the underlying queries typi-
cally go beyond the traditional spatio-temporal query
types, e.g., range, k nearest-neighbor (kNN), and ag-
gregation queries, e.g., (Benetis et al., 2002; Cai
et al., 2004; Shahabi et al., 2003), to more complex
and semantics-rich pattern queries, i.e., queries look-
ing for complex patterns in the spatio-temporal data.
The following examples demonstrate such complex
queries:
Example 1− Capturing Suspicious Activities: As-
sume that we want to monitor and report suspicious
activities from child-abuse criminals. A suspicious
activity can be defined as a child-abuse criminal who
appears in a school area, say A1, moves to a suspi-
cious area, say A2, within one hour, and then appears
again in area A1 in the say day. And his/her pres-
ence in each area should be at least x time interval
(to avoid noise events).
In Example 1, the query involves several spatio-
∗
This project is partially supported by the NSF-CRI
1305258 grant.
temporal range queries, time-based correlation among
the queries’ results, and persistency semantics, e.g.,
the criminal should stay in the school area for more
than x continuous minutes. Such complex query,
which captures the application semantics, cannot
be supported only by the traditional spatio-temporal
database systems.
Example 2− Generating Healthcare Alerts: In
healthcare systems, detecting potential threats for pa-
tients as early as possible can be used for preven-
tive medicine. For example, when monitoring pa-
tients with a weak immune system, if a patient P stays
in contact with another patient having a transferable
disease, then an alert should be sent to P to get away
from the current location. The definition of “being in
contact” can be defined as “being within a distance
d for a time interval more than m minutes from the
other person”.
In this example, the query involves multiple
ranges queries, synchronized execution between
them, and also persistency semantics, e.g., it is not
practical to assume a health threat and send an alert
to a patient depending solely on a single instance or
snapshot of the data.
Spatio-temporal pattern queries involve several
challenges including: (1) They capture and impose
diverse semantics that cannot be captured by cur-
rent spatio-temporal queries, (2) Unlike the tradi-
157
Zheng Y., Ductan A., Thomas D. and Y. Eltabakh M..
Complex Patten Processing in Spatio-temporal Databases.
DOI: 10.5220/0004992401570169
In Proceedings of 3rd International Conference on Data Management Technologies and Applications (DATA-2014), pages 157-169
ISBN: 978-989-758-035-2
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

tional queries, e.g., range or kNN queries, that can
be evaluated on each instance of the database in
isolation, pattern queries require correlation among
spatio-temporal events (both in time and space) over
multiple instances of the database, (3)
They re-
quire a full-fledged system with not only efficient
event-processing techniques but also efficient spatio-
temporal processing, and (4)
Unlike current event-
processing techniques that assume no control over
the input stream of events, spatio-temporal pattern
queries generate these streams of events using under-
lying traditional queries, e.g., range, kNN, or aggre-
gation, and hence crucial optimization opportunities
emerge to control which events to generate.
These challenges combined make the state-of-art
in complex event processing (CEP), e.g., (Wu et al.,
2006; Aguilera et al., 1999; Gehani et al., 1992), not
applicable since CEP techniques cannot process tra-
ditional range or kNN queries efficiently, let alone
the more complex spatio-temporal pattern queries.
They also make the state-of-art in spatio-temporal
databases (STDBs), e.g., (Behr and Guting, 2005;
Gedik and Liu., 2004; Wolfson et al., 1999), fall short
since they lack the expressiveness power and process-
ing capabilities of handling complex pattern queries.
Moreover, as we will discuss in detail in Section 2,
loosely stacking the CEP systems on top of STDBs
has serious limitations w.r.t communication, integra-
tion, and optimization.
In this paper, we propose the STEPQ system, an
extensible spatio-temporal engine for complex pat-
tern queries. STEPQ enables efficient and scal-
able evaluation of complex spatio-temporal pattern
queries. The key unique and novel cornerstones
of this project are: (1)
Coherent integrated system,
where spatio-temporal and pattern-matching process-
ing are combined and fully integrated in one consis-
tent system, (2)
Cross-cutting optimizations, where
the pattern-matching queries can optimize the execu-
tion of the underlying spatio-temporal queries by con-
trolling when to run/suspend a query and what events
to generate, and (3)
Extensible architecture, where we
provide not only concrete and well-defined query op-
erators, but also abstract interfaces that can accommo-
date for a wide range of applications and semantics
through pluggable modules.
2 CHALLENGES & SOLUTIONS
2.1 Challenges in Spatio-temporal
Pattern Queries
A spatio-temporal pattern query can be viewed as
a two-layered query. The first layer executes one
or more of traditional spatio-temporal queries, e.g.,
range and kNN, on top of the raw input stream com-
ing from moving objects (we refer to these queries
as base queries). The second layer executes one or
more complex pattern-matching queries on top of the
results generated from the base queries.
One possible solution to support spatio-temporal
pattern queries is the application-level solution de-
picted in Figure 1(a). As highlighted in (Xiao and
Eltabakh, 2013), this solution has several drawbacks
including: (1)
mobile devices usually have limited
power and processing capabilities, and hence the re-
quired processing may not be even feasible on these
small devices, and and (2)
lack of many possible opti-
mizations that could have been performed by the exe-
cution engine.
Another, more feasible, solution is the
middleware-level solution depicted in Figure 1(b).
In this solution, the existing CEP systems act as a
middleware layer deployed on top of the STDBs. In
this case, applications need to decompose a given
pattern query into one or more spatio-temporal base
queries that can be executed by the STDBs and
separate pattern queries that can be executed by the
CEP system. The results from the base queries should
act as input streams to the CEP system. Although
this approach is more feasible, it does not address
the following challenges in spatio-temporal pattern
queries:
(1) Coupling Challenges: There are several link-
ing problems that emerge between the STDB and CEP
layers. First, STDBs deploy incremental evaluation
techniques for purposes of efficiency and scalability,
whereas CEP systems do not handle incremental up-
dates of the input events. Second, base queries may
produce empty results, e.g., empty range query, which
will be mistakenly interpreted by CEP systems as no
input events. Interestingly, empty results still need
to be processed as special events since they may in-
validate or reset patterns looking for continuity, e.g.,
the query in Example 1 requires continuous range-
existence for at least x minutes in area A1. Third, base
queries can themselves be moving objects, and hence
CEP systems need to get as input not only the query
answer, but also the query points.
(2) Optimization Challenges: Since spatio-
temporal pattern queries generate both base queries
DATA2014-3rdInternationalConferenceonDataManagementTechnologiesandApplications
158

!"#$%&'()"%*#+,
-#.#/#0(,12342(,5!'-67,
8""+49#$%2,
!"#$%&'($)$*+,&-
.%,*$//,%-
-#
0."+,')$1.,%"2-
-34$%5$/-
6&/7$%/-),-
34$%5$/-
5#7,8""+49#$%2&+(:(+,!%+;$%2,
!"#$%&'()"%*#+,
-#.#/#0(,12342(,5!'-67,
<%)"+(=,1:(2.,
>*%9(00423,12342(,5<1>7,
8""+49#$%2,
>*%9
!"
6&/7$%/-),-
08-34$%5$/-
6&/7$%/-),-
."#$%&-34$%5$/-
0."+,')$1.,%"2-
-34$%5$/-
."#$%&-
34$%5$/-
5/7,?4@@+(A#*(&+(:(+,!%+;$%2,
>B&<%)"4+(*C"$)4D(*,
!'&<%)"4+(*,
C"$)4D(*,
C"$)4D(
!'&<%)"4
C"
$)
4D
(*
>?&1=(9;$%2,
12342(,
!'&1=(9;$%2,
12342(,
$%2,
!'&1
!"#$%&'()!(*+(#)
,'-.+/#0)1)2.&-+3#0)
0."+,')$1.,%"2-
-34$%5$/-
!"#$%&-34$%5$/-
8""+49#$%2,
40'.'5#6)7859#-)
0."+,')$1.,%"2-
."#$%&-34$%5$/-
6&/7$%-
597,!'1>B,>*%"%0(@,!%+;$%2,
Figure 1: Possible Architectures for Spatio-Temporal Pattern Queries (Xiao and Eltabakh, 2013).
and pattern-matching queries, then several optimiza-
tion opportunities arise. However, since the STDB
and CEP layers are loosely coupled and queries are
isolated from each other, then these cross-cutting op-
timizations cannot be performed. The following ex-
ample illustrates possible optimizations that cannot
be performed within the application- or middleware-
level solutions.
Example 3− Testing Effect of Radar Signs: Assume
a radar sign is added in a certain area, A2, and we
want to test the affect of the sign on the speeding cars.
A query can be: For consecutive areas A1, A2, and
A3, report speeding cars (over the speed limit for at
least x mins) in A1 and A3 but not in A2.
The query in Example 3 involves three range
queries over areas A1, A2, and A3. A naive plan is to
run the queries in isolation from each other. However,
in a more optimized plan, the queries over A2 and A3
should run only if there is a match in the previous ar-
eas. The two latter queries can be further optimized
by considering only the cars that matched the pattern
in the previous areas. These types of optimizations
are not feasible in the middleware-level approach.
(3) Synchronization and Transformation Chal-
lenges: A spatio-temporal pattern query may require
not only executing multiple base queries to generate
events, but also synchronizing their execution. The
query in Example 4, demonstrates the need for such
synchronization.
Example 4− Common kNN Query: Assume two
moving cars and they want to find restaurants that are
in the kNN of them and getting closer to both cars
over and interval T. That is, finding common nearby
restaurants in the direction of the moving cars.
In this example, the query requires synchroniz-
ing the execution of two moving kNN queries, i.e.,
they should produce results almost simultaneously,
and then jointly processing their results, e.g., inter-
secting the output from both queries. Such synchro-
nization and transformation overthe event streams are
not feasible in the middleware-level approach and not
even supported by current STDBs.
2.2 Overview on The STEPQ System
To address the above challenges, we proposed the
STEPQ system depicted in Figure 1(c). In (Xiao and
Eltabakh, 2013), we highlighted the architecture of
the system. In this paper, we present the details of the
system along with its experimental evaluation.
STEPQ consists of two standard layers; compila-
tion/optimization and execution layers. In the com-
pilation/optimization layer, we introduce the pattern-
query compiler & optimizer (PQ-CompilerOptimizer)
component which is the central component of the sys-
tem responsible for compiling and optimizing the en-
tire query. Given a spatio-temporal pattern query, PQ-
CompilerOptimizer decomposes it into one or more
traditional queries (the base queries) and pattern-
matching queries. The individual base queries,
e.g., range or kNN queries, are compiled and opti-
mized using an extended spatio-temporal compiler
& optimizer (ST-CompilerOptimizer) that works un-
der the control of the PQ-CompilerOptimizer. In
contrast, pattern-matching queries are fully compiled
by PQ-CompilerOptimizer. The base queries will
be executed by the extended spatio-temporal execu-
tion engine (ST-ExecutionEngine), while the pattern-
matching queries will be executed by the pattern-
matching execution engine (PM-ExecutionEngine).
The continuously generated results from the base
ComplexPattenProcessinginSpatio-temporalDatabases
159

queries will drive the progress of the pattern-matching
queries.
The ST-CompilerOptimizer and ST-
ExecutionEngine components will inherit and
leverage the state-of-art technologies from spatio-
temporal databases and will be extended with new
features as needed. For example, new operators will
be introduced such as: (1) Materialization operators
that materialize the incremental updates produced
from the base queries to complete answer sets
before feeding them to the PM-ExecutionEngine, (2)
Synchronization operators that ensure synchronized
execution over multiple spatio-temporal queries, and
(3)
Transformation operators that apply any required
transformation over the answer sets produced by the
base queries.
To evaluate the pattern-matching queries, the PM-
ExecutionEngine uses a variant of Non-deterministic
Finite Automata (NFA) as well as a set of opera-
tors that manipulate the automata results. NFAs have
been adopted by several systems that represent a pat-
tern query as a sequence of automata states (Wu
et al., 2006; Adaikkalavan and Chakravarthy, 2003;
Demers et al., 2006). While leveraging this work,
we provide substantial and core extensions crucial
to spatio-temporal pattern queries such as extended
event model, abstract automata interfaces for extensi-
bility, and new event operators.
The proposed STEPQ system addresses the three
key challenges highlighted in Section 2.1 as fol-
lows. The Coupling challenges are addressed by the
PQ-CompilerOptimizer component, where the spatio-
temporal and patten queries are linked and aligned to-
gether to achieve correct execution. The Optimization
challenges are addressed through a feedback mecha-
nism built between the pattern queries and the the cor-
responding spatio-temporal queries. This feedback
mechanism enables the pattern queries to send hints
and control signals to the spatio-temporal queries to
optimize their execution. The Synchronization chal-
lenges are addressed through the newly introduced
operators, i.e., the Materialization, Synchronization,
and Transformation operators, that operate on the re-
sults of the spatio-temporal queries before passing
them to the PM-ExecutionEngine.
3 STEPQ MODEL & LANGUAGE
3.1 STEPQ Event Model
STEPQ manages several events at different granulari-
ties, e.g., raw events from moving objects, and spatio-
temporal events generated from the running queries.
Therefore, the event model in STEPQ consists of
three event types, which are raw, event set, and event
list, defined as follows:
Raw Event: A raw event R
S
is a primitive instanta-
neous event that has no time duration and follows the
schema S that defines the attributes of R.
An example of raw events is a stream identi-
fying an object’s movement, e.g., (ObjectId, Loca-
tion, Speed, and Direction). These events are the in-
put to the ST-ExecutionEngine to execute the spatio-
temporal queries.
Event Set: An event set E
S
= {R
1
S
, R
2
S
, ..., R
k
S
} consists
of a set of primitive events following the schema S
and with no order imposed between them. E
S
is an
instantaneous event that has no time duration.
An example of an event set is the answer produced
from one of the base queries, e.g., the query monitor-
ing the speeding cars in region A1 (Example 3), or the
query reporting the k nearest neighbor restaurants to a
moving car (Example 4). These events are the input to
PM-ExecutionEngine to execute the pattern queries.
Event List: An event List L
S
= [R
1
S
, R
2
S
, ..., R
k
S
] con-
sists of a list of ordered primitive events following the
schema S. L
S
spans the time duration between the first
and last primitive events R
1
S
and R
k
S
.
An example of an event list is the speeding event
of a car L
S
= [R
1
S
, R
2
S
], where R
1
S
is the primitive event
corresponding to the first detection that the car is over
the speed limit, and R
2
S
is the primitive event corre-
sponding to reporting the car as speeding.
3.2 Language Building Blocks
In this section, we present several features of the
STEPQ query language through examples. Since the
event model in the system is based on the relational
model, i.e., each event or event set has a well-defined
schema, the query language is designed to be very
similar to SQL with several extensions, which in-
clude: (1)
The language allows the computations to
be performed as a series of steps, where the output
from each step can be assigned to a named variable,
and then used later by other steps, (2)
New commands
and clauses that enable synchronized query process-
ing, and persistency predicates, And (3)
Handling
streams of events instead of static relational tables.
The following examples demonstrate the main build-
ing blocks of the language.
The Query in Example 3: Assume the query
is processes an input spatio-temporal stream called
CarStream. The stream has the following schema
DATA2014-3rdInternationalConferenceonDataManagementTechnologiesandApplications
160

(carId, location, speed). Then, The query can be ex-
pressed as:
SpeedInA1 =
Select carId
From (Select carId
From CarStream
Where speed > 65 and location in A1) As Q1
Persistency Duration 2 mins;
SpeedInA2 =
Select carId
From (Select carId
From CarStream
Where speed > 65 and location in A2) As Q2
Persistency Duration 2 mins;
OutFromA2 = Select carId
From SpeedInA1
Where carId Not In (Select carId From SpeedInA2);
...
...
Use of variables
Spatio-temporal query inside
the From clause
Automata state that
check the persistency of
the event for 2 mins
Each query corresponds to
unary automata states
Input stream from the first
state to the second state
Causes the SpeedInA2 automata
state to be a binary state
In the language, the From clause takes either a
spatio-temporal query or an output from a previous
automata state. The language will not allow multi-
ple streams in the From clause. For example, in the
1
st
and 2
nd
statements, the From clause takes range
queries over areas A1, and A2, respectively. The
Persistency clause indicates that a successful event
should be persistent for 2 mins. Given the first two
statements, their compilation output will be a spatio-
temporal range query for each statement as well as a
unary automata state accepting the output from each
query and checking for the persistency (See Figure 2).
The 3
rd
statement in the script will then link the
two automata states together. The statement indicate
that each event in
SpeedInA1
should be reported if
not in
SpeedInA2
. Thus, the second automata state
will bind to the first state as its left input as indicated
in Figure 2. Notice that the first two statements in
the script, referred to as “State Statements”, do not
impose any sequential order between the two queries,
but the third statement, referred to as “Binding State-
ment”, creates this order. To complete the query in
Example 3, the script will include two more state-
ments, one statement similar to the first two state-
ments to create
SpeedInA3
stream, and the final one
to produce the output where the
OutFromA2
stream
should exist in the SpeedInA3.
The Query in Example 4: In this query, we need to
synchronize the execution between two kNN queries.
The language enables this synchronizations using new
commands as follows:
Notice that Step 1 and 2 create two kNN spatio-
kNN1 = Select restaurantId
From (kNN spatio-temporal query for Car 1) As Q1;
kNN2 = Select restaurantId
From (kNN spatio-temporal query for Car 2) As Q2;
SyncQ = Synchronize kNN1, kNN2
Using (Select resturantId From kNN1
Intersect
Select resturantId From kNN2);
Select resturantId
From SyncQ
Persistency Duration T seconds;
Two spatio-temporal
queries
Synchronization and
transformation
Report restaurants that persist in
the output for T seconds.
temporal queries for the two cars involved in the
query. Then, in Step 3, the
Synchronize
statement
takes two or more base queries and synchorinze their
execution, i.e., they produce results almost simultane-
ously (More details are presented in Section 6). The
Synchronize command treats the output from each
query as a relational table, and hence on top of the
synchronization, any transformations on these rela-
tions is possible (The transformation phase is also
presented in Section 6). In our example, the transfor-
mation involves intersecting the two relations to find
the common restaurants to the two cars. The 4
th
state-
ment in the script is to ensure the persistency of any
common restaurant for a duration T seconds before
reporting it.
4 PLAN GENERATION
The PQ-CompilerOptimizer component is the heart
of the STEPQ system. It is responsible for
compiling—and ultimately optimizing—the entire
spatio-temporal pattern query. The input to PQ-
CompilerOptimizer is a query expressed in STEPQ’s
high-level language (Section 3.2). The output is a
complete query plan divided into two layers; the
lower layer is one or more spatio-temporal queries
(executed by the ST-Execution Engine), and the up-
per layer is the pattern matching query (executed by
the PM-Execution Engine).
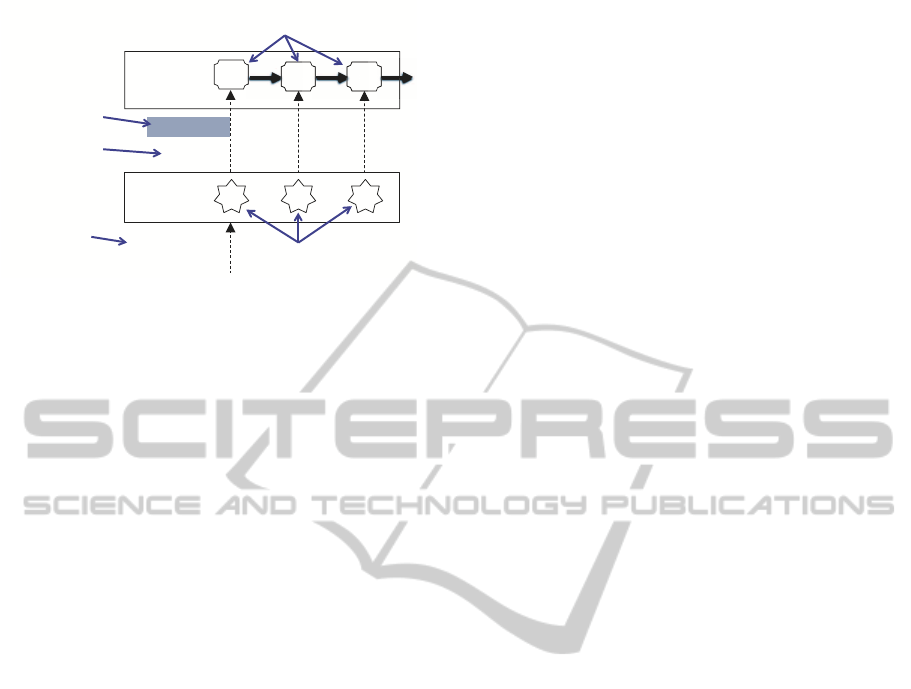
For example, given the query in Example 3, the
system will generate the query plan illustrated in Fig-
ure 2. The raw events will feed three different range
queries monitoring areas A1, A2, or A3, respectively,
and reporting any car with speed higher than the speed
limit. Notice that these queries check the speed on
each individual instance (without memorization or
pattern construction). The patterns are then formed
ComplexPattenProcessinginSpatio-temporalDatabases
161
#$"
#!" #%"
&'(')$"
&'(')!"
&'(')%"
!"#$%&'()*+,
$+-.+&,
/0#$%&'()*+,
$+-.+&,
)%
*+,))",(-.)"/0),1)2"34),"
(,)(2"#$5"#!5"(-6"#%"
*+,))"2'(')2"73,"8(,2"29))61-."1-"#$5"-3'"
29))61-."1-"#!5"(-6"29))61-."1-"#%"
{(C1, 83),
(C2, 75)}
[CarId, Speed]
:4)-'"2)'"9,3608)6"7,3;"
'+)"<(2'")=)80>3-"
:4)-'"2)'"28+);("
(C1, Area A1, 83, N)
(C5, Area A1, 55, N)
?(@")4)-'2"
Figure 2: Execution Plan for Example 3 Query.
and checked in the upper layer of the query. For ex-
ample, State 1 in the automata will check that a car
stays above the speed limit for all event sets within
an interval T. If that is the case, then the car will be
considered as speeding in area A1 and the automata
moves to the next state. The basic functionalities of
the PQ-CompilerOptimizer include:
(1) Query Decomposition: Given a spatio-
temporal pattern query, PQ-CompilerOptimizer de-
composes the query into one or more base queries
and a pattern-matching query. For example, given the
code for Example 3 query highlighted in Section 3.2,
the system identifies three range queries over regions
A1, A2, and A3. These individual base queries are
passed to ST-CompilerOptimizer for compilation and
optimization according to the state-of-art in STDBs.
The next step is to identify the automata states in
the query. This is defined through some clauses in
the query such as the Persistency clause. For exam-
ple, referring to the query’s code, each of the three
range queries mandate a persistency of 2 mins. Thus,
the system creates an automata state corresponding
to each base query. Each state has several proper-
ties and interface functions that define the behavior
of the state. For the Persistency clause, the system
can automatically set these properties and interface
functions—More details are presented in Section 5 on
these interface functions.
Each created automata state is either a unary or
binary state. A unary state has a single input stream
coming from a base query, e.g., State 1 in our exam-
ple. In contrast, a binary state takes an additional
input from another automata state. Referring to the
query’s code, the 3
rd
statement specifies that the out-
put from State 1 is filtered by by the output from State
2. Thus, the system will make State 2 as a binary state
and feeds State 1’s output to it as depicted in Figure 2.
The same generation process applies to State 3. At
this stage, the base and automata states are generated
but without a connection between between them. In
the current version of STEPQ, the creation of the au-
tomata states is not based on a cost model. Instead,
the system uses a set or rules and templates to map
from the high-level language to the exception plan.
(2) Coupling Base and Pattern Queries: The
two layers of the query have to communicate with
each other by passing events and hints. We devel-
oped a new mechanism through a tagging scheme
controlled by the PQ-CompilerOptimizer, in which a
tag will be assigned to each base query. A query’s
output will be labeled with that tag. The automata
states generated by PQ-CompilerOptimizer will be
also tagged such that each stream of input events is
coupled with its corresponding automata state(s), i.e.,
each automata state will accept only events corre-
sponding to tag. It is possible that a single base query
may feed multiple states (in the same automaton or
different automata), hence the same tag can be as-
signed to multiple states. Referring to the example
query in Figure 2, each of the three base queries will
be assigned tags, t1, t2, and t3, respectively. The three
automata States will be also assigned the same tags.
(3) Adding Materialization Operators: The out-
put produced from the ST-ExecutionEngine can in-
cremental, i.e., producing only the delta from the
previous output. Most spatio-temporal database sys-
tems support the incremental update of results for ef-
ficiency purposes (Gedik and Liu., 2004; Hu et al.,
2005). There are two options for handling incre-
mental updates; either the PM-ExecutionEngine be-
comes aware of the incremental updates and capable
of processing the positive- and negative-tuples gen-
erated from the base queries, or the answer set be-
comes fully materialized before it is sent out from the
ST-ExecutionEngine. We favored the latter approach
because this issue is more tight to the base queries
than the pattern-matching queries. Therefore, we in-
troduced a new materialization operator, which will
be added by the PQ-CompilerOptimizer on top of the
base query plan whenever needed. Therefore, we ex-
tended the ST-CompilerOptimizer
(4) Building Feedback Channels: The created
query plan is now ready for execution. The three base
queries are event-drivenqueries, i.e., once a new event
arrives to their input streams, they update their out-
puts and produce a new result. Although this execu-
tion will produce correct results for the entire query, it
is an optimized execution. The reason is that starting
the 2
nd
and 3
rd
base queries without having any out-
put from State 1 would be wasting of resources. An
important optimization that STEPQ offers is the feed-
back mechanism by which the automata states can
control the execution of the base queries. Therefore,
the 2
nd
and 3
rd
base queries will be controlled by sig-
DATA2014-3rdInternationalConferenceonDataManagementTechnologiesandApplications
162

nals from the 1
st
and 2
nd
automata states, respectively.
In this case, they start producing results only when the
preceding state produces a result.
5 QUERY EXECUTION
After the query plan has been formed, the execution
starts by consuming raw spatio-temporalevents by the
base queries and producing event sets to the pattern
query. The PM-ExecutionEngine is responsible for
the execution and maintenance of the automata and
their manipulation operations. The key tasks during
the execution are:
(1) Handling of Event Sets: Each answer set pro-
duced from a base query is treated as an event set E
conforming to a specific known schema S
E
. The set E
carries a tag that identifies the target automata states.
When PM-ExecutionEngine receives an event set, it
will forward it—depending on its tag—to the state(s)
of interest. Currently, the forwarding mechanism is
performed in a straightforward manner, in which we
scan all states to find the ones having a matching tag.
However, for scalability issues, we plan in the future
to support indexing the automata states based on their
tags. And hence, only the target states will be re-
trieved for execution. Once a state receives an input
event, it updates its local information and may change
the query’s state.
(2) Extensible Execution of Automata States:
The construction of an automaton and the behavior
of its states is typically defined at compilation time
based on the query operators. When start executing,
it is possible that several states be running simultane-
ously and consuming or producing results. Although
our long term plan is to provide a rich set of event
operators, we strongly believe that a degree of ex-
tensibility is essential for broader applicability of the
system. Therefore, we abstract the definition of an
automata state using a set of properties that define
its structure and behavior, e.g., internal functionality,
input stream(s), output stream, the transition to next
state, etc.
We categorize the properties of each state into
Structural Properties and Behavioral Properties. The
structural properties define the inputs and outputs of
a given state along with their schemas including: (i)
Right input stream R with schema S
R
(always exist),
(ii) Left input stream L with schema S
L
(only for bi-
nary states), and (iii) Output stream O with schema
S
O
. If the state is binary, then its left input stream is
basically the output stream of the previous states. The
behavioral properties define the functionality and ac-
tions of the state and can be abstracted using the five
interface functions presented in Figure 3.
The Initialize() function initializes a state when
it is first created. If the state is binary, it may re-
ceive its first input event set from the previous state
as a parameter during the creating time. The Right-
StatusUpdate(), and LeftStatusUpdate() functions up-
date the state’s information whenever a new event set
arrives either from the right, or left input streams,
respectively. The ForwardCondition() specifies, de-
pending on the current state information, whether or
not the state is ready to produce an output event to the
next state. This function is executed automatically af-
ter each call to the status-update functions. Finally,
the ForwardAction() function is executed only if For-
wardCondition() returns True to produce an output
event from this state and pass it to the next state.
The interface functions are generic functions cre-
ated by either of the following two means: ((1)
Au-
tomated Creation− Given a high-level query (Refer
to the examples in Section 3.2), the system auto-
matically generates the corresponding automata states
along with their interface functions to implement the
query’s semantics. ((2)
Manual Creation− In the
cases where the system-defined operators fall short in
expressing certain complex patterns, the query devel-
opers may supply these interface functions as black-
box pluggable modules to define the query’s behavior.
Example 5: Consider State 1 in Figure 2. This state
should keep track of the cars reported continuously
from the base query over an intervalT. Thus, the state
maintains a local data structure, e.g., a hash table,
consisting of two columns: the carId and the times-
tamp at which this entry has been created. Different
automata states may maintain different data structures
to efficiently perform their intended functionalities,
e.g., the hash table is a query-specific structure to per-
form fast lookup for its entries. The basic function-
ality of each of the interface functions presented in
Figure 3 is as follows:
Initialization():
This function builds the
hash table with no entires.
RightStatusUpdate():
This function takes the
input event sets produced from the corresponding
range query, and for each event, say for car id = x,
the function checks if x is not in the hash table, then
a new entry is created for x with the current times-
tamp. If x is in the hash table, then nothing will be
done. Moreover, to check for continuity, each carId
that is in the hash table and not in the current event
set, will be removed from the table (because it is not
continuously over the speed for interval T).
LeftStatusUpdate():
This function will be
empty since the state is a unary state.
ComplexPattenProcessinginSpatio-temporalDatabases
163

Interface Function
Triggering Time
Description
Void Initialize(Schema:S
L
metaData)
Once when the state is first created.
Initializes the state information. If it is a binary
state, then it may receive metadata from its
previous state following schema S
L
.
Void RightStatusUpdate(Schema:S
R
E)
When a new event set E arrives
from the right input stream
(following schema S
R
).
Updates the state information based on the newly
arrived event set.
Void LeftStatusUpdate(Schema:S
R
E)
When a new event set E arrives
from the left input stream
(following schema S
L
).
Updates the state information based on the newly
arrived event set (Left streams exist only for
binary states).
Boolean ForwardCondition()
After each execution of
RightStatusUpdate() or
LeftStatusUpdate() functions.
Checks the state information and returns True if
a new output event should be produced from the
state. Otherwise, returns False.
Schema:S
O
ForwardAction()
Called when ForwardCondition()
function returns True
Creates a new output event set following schema
S
O
and pass it to the next state.
!
!
!
!
Figure 3: Extensible Interface functions of the automata states.
ForwardCondition():
Given the current time,
this function checks each entry in the hash table, and
if an entry has been in the table for interval T or more,
the function returns True. Otherwise, it returns False.
ForwardAction():
This function removes each
entry from the hash table with interval larger than or
equal to T, and forms an output event set to be sent
for the second state.
6 QUERY SYNCHRONIZATION
In some cases the base queries need to be coordi-
nating their execution and not running in isolation of
each other, i.e., queries may require synchronization
and joint processing over the generated events. For
example, the query in Example 4 requires synchro-
nization of two concurrent kNN queries as illustrated
in Figure 4. Notice that this query cannot be rep-
resented by, for example, two consecutive states be-
cause automata states can enforce sequential execu-
tion but not synchronized execution. In order to sup-
port this type of query processing we extended PQ-
CompilerOptimizer with new features, which include:
identifying the base queries to be jointly processed,
determining the best way of synchronizing their exe-
cutions, and jointly processing their outputs.
• Determining Synchronization Mechanism:
Synchronized queries need to produce results almost
simultaneously. Therefore, synchronization mech-
anisms among spatio-temporal queries are needed.
For example, synchronization can be time-based, i.e.,
queries execute every ∆ time units, or event-based,
i.e., queries execute whenever a triggering event initi-
ates the execution of any of the synchronized queries.
In the current version of the system, we support time-
based synchronization, and in the future we plan to
also support event-based synchronization. For exam-
ple, the query in Figure 4, the two base queries are
getting the common kNN restaurants for two moving
cars. Thus, the execution of these two queries will
be synchronized, i.e., when one query executes, the
other one will be also triggered. As will be explained
in sequel, synchronizing the execution timing alone
does not guarantee the outputs will be produced at the
same time.
• Synchronization Operator: Even though the
execution of the base queries will be synchronized,
e.g., time-based or event-based synchronization, there
are still no guarantees that the base queries will pro-
duce results at the same time. For example, one query
can be more complex and takes more time than the
other queries. Therefore, we introduce a new syn-
chronization operator that blocks its output until it
receives all inputs coming from the underlying syn-
chronized base queries. The synchronization operator
is a blocking N-ary operator that is ready to produce
output once all its inputs are received. For its output
side, given an index i, where 1 ≤ i ≤ N, the opera-
tor returns its i
th
event set. For example, the query in
Figure 4 uses a binary synchronization operator that
pipelines either of its two inputs to the next operators
on request.
• Building Transformation Plan: The results
from the synchronized base queries need to be trans-
formed and jointly processed to produce a single
stream of event sets. The PQ-CompilerOptimizer is
responsible for building the needed transformation
plan on top of the synchronized queries at compile
time and passing that plan to ST-ExecutionEngine for
execution. Since each event set produced from a base
query can be viewed as a relational table, i.e., it has
a schema and several events following this schema,
then a powerful and practical mechanism for the joint
processing and transformation is the use of relational
operators, e.g., select, project, join, grouping, and set
DATA2014-3rdInternationalConferenceonDataManagementTechnologiesandApplications
164

!"#$% !"#&%
'("()$%
!"#$%&'()*+,
$+-.+&,
)$
*+,%-./01#,/23)4%566%78)#2)-%
9/()#-)0:,/%
,;)#"(,#%
<%-("()%=,#%>/42/?%0,@@,/%#)-("8#"/(-%
,=%(1)%@,A2/?%0"#-%,A)#%2/()#A"B%*%%
BC#$%&'()*+,
$+-.+&,
'./01#,/23":,/%
,;)#"(,#%
Figure 4: Synchronized Execution Plan for Example 4
Query.
operators. Hence, in a given a spatio-temporal pat-
tern query, users can express the required transfor-
mation using standard SQL queries over the synchro-
nized event sets. The transformation operators are
typically deployed on top of the synchronization op-
erator to ensure that the input relations are simultane-
ously present. For example, in Figure 4, the trans-
formation plan contains only an intersection opera-
tor between the 1
st
and 2
nd
arguments of the down-
stream synchronization operator. However, in gen-
eral, it may contain joins, grouping and aggregation,
duplicate elimination, etc.
7 RELATED WORK
Dedicated spatio-temporal databases (STDBs), e.g.,
(Behr and Guting, 2005; Dieker and Guting., 2000;
Xiong et al., 2005), have been proposed and flour-
ished over the past three decades to efficiently process
spatio-temporal data streams. STDBs address unique
characteristics and requirements such as: (1)
objects
are typically moving in space and time, and hence
these two dimensions (space and time) require spe-
cial processing, (2)
queries themselves can be moving
queries, e.g., a moving car or person, and hence spe-
cial algorithms are needed for efficient evaluation, (3)
spatial-aware query operators and data structures are
needed for efficient processing and fast access, and
(4)
the number of object and queries (both can be sta-
tionary or moving) can be very large, and hence scal-
able processing and incremental evaluation is a must.
Within STDBs, a flurry of research activities and
optimizations have sprung up including: continuous
and incremental query evaluation (Chen and Patel,
2007; Choi and Chung., 2002; Mokbel et al., 2004b),
spatial-aware operators (Elmongui et al., 2005; Mok-
bel et al., 2004a), spatial indexes (Benetis et al., 2002;
Xiong et al., 2006), and shared execution (Dieker
and Guting., 2000; Hu et al., 2005). Other exist-
ing techniques focus on detecting moving clusters
or phenomena over time (Marios Hadjieleftheriou ad
George Kollios and Tsotras., 2003; Ali et al., 2007),
privacy-aware location services (Cheng et al., 2006;
Yiu et al., 2009), and approximate processing of
range and kNN queries (Kanoulas et al., 2006; Moura-
tidis et al., 2005). However, none of these techniques
is applicable to answer the complex pattern queries
presented in Examples 1 & 2. The reason is that al-
though these techniques can efficiently build correla-
tions and detect patterns over the raw spatio-temporal
streams, they are not designed to detect more complex
patterns over the results from spatio-temporal queries.
Thus, either of the application-level or middleware-
level approaches need to be integrated with the above
techniques, which is not an efficient solution as pre-
sented in Section 2.
On the other hand, complex event process-
ing (CEP) has been extensively studied in active
databases (Carey et al., 1988; Chakravarthy et al.,
1994), publish/subscribe systems (Aguilera et al.,
1999; Fabret et al., 2001), and data stream sys-
tems (Arasu et al., 2003; Chandrasekaran et al., 2003;
Cugola and Margara, 2012). Query languages and op-
erators have been proposed to express pattern queries
and to correlate events over time, e.g., (Wu et al.,
2006; Lerner and Shasha, 2003). However, these
systems use only the Time dimension as the driv-
ing dimension, and hence they lack all the research
technologies established in spatio-temporal DBs over
the past decades. As a result, given the raw spatio-
temporal streams generated from the moving ob-
jects, CEP systems can handle neither the traditional
spatio-temporal queries nor the more-complex pattern
queries illustrated in Examples 1 & 2.
The spatio-temporal pattern queries addressed in
this paper has some similarity to the continuous
queries in data stream systems (Nehme and Runden-
steiner., 2006; Mukherji et al., 2008) in that both types
of queries are continuously executing over streams of
data. However, a key difference is that the current
technology in continuous queries cannot optimize or
control the sources creating the data streams. In con-
trast, in the proposed query type (spatio-temporal pat-
tern queries), the intermediate sources of the data
streams are spatio-temporal queries that can be con-
trolled and optimized. As highlighted in Section 2,
loosely integrating the STDBs with CEP or stream
processing systems is not an efficient solution as
it will miss critical optimizations, synchronization
among queries, and unnecessary overheads. In con-
ComplexPattenProcessinginSpatio-temporalDatabases
165
trast, the proposed STEPQ system is a single coherent
engine that overcomes these limitations.
8 EXPERIMENTAL EVALUATION
!"
#!"
$!"
%!"
&!"
'!!"
!('" !(#" !($" !(&"
!"#$"#%&'%&"&%'()*"
+,-)"#$"&.)"/%)01"2345)"
/%)01"6.0#%5.'%&"
)"*"'!"+,-" )"*"#!"+,-"
)"*"$!"+,-" )"*"&!"+,-"
Figure 5: Throughput from Query Q1.
!"
#!"
$!!"
$#!"
%!!"
%#!"
&!!"
!'$" !'%" !'(" !')"
!"#$%$&'$$()*+,-$
./0,$&'$(1,$2),34$5"67,$
!"#$./0,$8,3$9)(&:"("$.("(,$
*+,+-"$""
*+,+-"%"
*+,+-"&"
Figure 6: Buffer Size in Automata States in Query Q1.
!"
#!!!"
$!!!"
%!!!"
&!!!"
'!!!!"
'#!!!"
'$!!!"
!('" !(#" !($" !(&"
!"#$%&'()'*"+,%-'
./0%'()'12%'3"%&4'5678%'
96-%'3"%&4':;'<&(=">%='*"+,%-'
!"#$%&
'%%()"*+&
!"
#!!!"
$!!!"
%!!!"
&!!!"
'!!!!"
'#!!!"
!('" !(#" !($" !(&"
!"#$%&'()'*"+,%-'
./0%'()'12%'3"%&4'5678%''
96-%'3"%&4':;'<&(=">%='*"+,%-'
!"#$%&
'%%()"*+&
Figure 7: Naive vs. Feedback Base Query Execution in Q1.
STEPQ is implemented using the TerraLib module
on top of PostgreSQL. TerraLib is an extension to
the database systems to support spatio-temporal data
types and queries. We extended the system by adding
the PQ-CompilerOptimizer and PM-ExecutionEngine
components (Refer to Figure 1). The experiments are
conducted using an AMD Opteron Quadputer com-
pute server with two 16-core AMD CPUs, 128GB
memory, and 2 TBs SATA hard drive. We study
the performance of the system using two queries; Q1
(presented in Example 1), and Q4 (presented in Ex-
ample 4).
Data Sets: We use the Network-Based Genera-
tor of Moving Objects (Brinkhoff and Str, 2002) to
generate a set of 50,000 moving objects. For Query
Q1, we labeled 10% of the moving objects as suspi-
cious criminals, and we labeled 5% of the map area as
school areas, and each school area has another nearby
suspicious area, i.e., another 5% of the map area. The
execution of Q1 requires three base queries (spatio-
temporal range queries) over areas A1, A2, and A1
again, and on top of that we have three automata
states, each one checking the persistency condition in
its area (Similar to the query plan in Figure 2). In the
experiments, specifically in Figure 7, we will clarify
the reason behind not merging the first and last base
queries together.
Query Q1 has two key parameters, which are the
range size around the school and suspicious areas, and
the time interval x that represents the persistency over
a period of time. In Figure 5, we varied these two
parameters. The range size varies over the range be-
tween 0.1 and 0.8 miles around the above mentioned
areas, and the persistency interval varies over the val-
ues of 10, 20, 40, and 80 seconds. In the experi-
ment, we measured the query throughput over a sim-
ulated 20-mins run. The experiment in performed 5
times and the average numbers are reported in the fig-
ure. The results show that as the size of the query
range increases, the number of matched tuples also
increase but at a linear rate, i.e., the range size is in-
creasing exponentially, but the number of produced
tuples is increasing linearly. This is partially due to
the persistency condition that imposes additional con-
straint over the reported data. But more importantly
due to the transitions over different states as will be
discussed in Figure 6. On the other side, the query
throughput is inversely proportional to the persistency
intervalx, i.e., as x increases, less numberof the tuples
satisfy the query semantics as depicted in Figure 5.
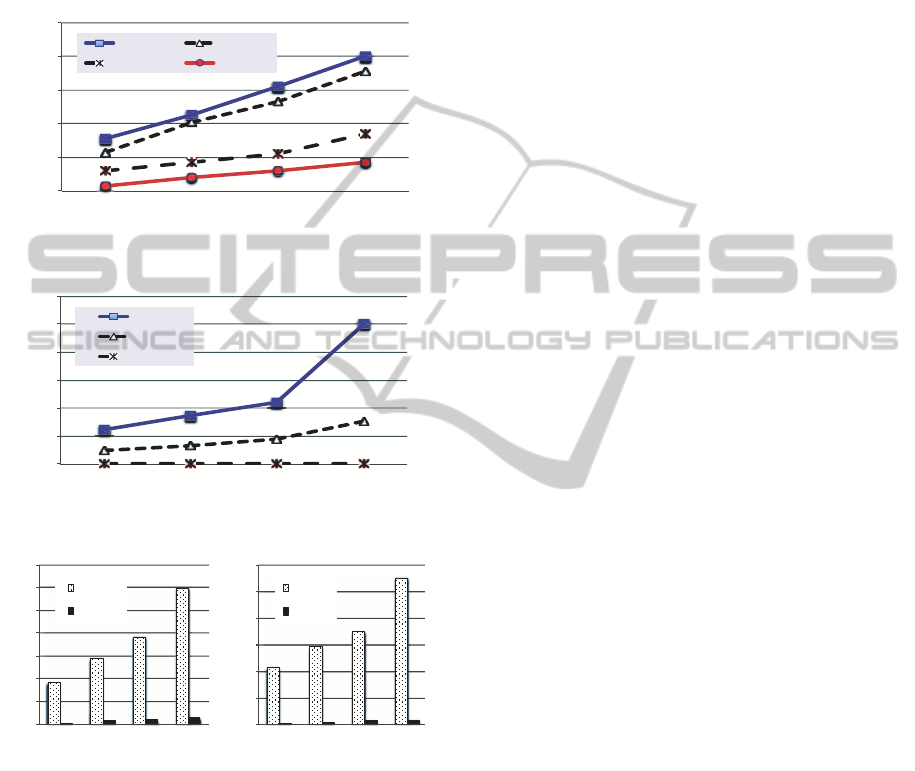
In Figure 6, we study the maximum number of tu-
ples buffered in each of the query states at any given
point in time during the query. The query (Q1) has
three states monitoring the transitions of the criminals
over the school and suspicious areas. In the experi-
ment, we fix the persistency interval to 40 seconds,
and vary the size of the query range as illustrated in
the figure. The results illustrate that for State 1, the
number of buffered tuples is increasing exponentially
as the range size also increases exponentially. How-
ever, this trend does not continue to States 2 and 3 be-
cause only small subset of the tuples satisfying State
1 move to State 2, and then a smaller number satisfies
State 2 conditions and move to State 3.
In Figure 7, we study the effect of the cross-
cutting optimizations between the automata states and
DATA2014-3rdInternationalConferenceonDataManagementTechnologiesandApplications
166

the base queries generating the events. In a naive
approach (labeled “Naive” in the figure), each query
would report the tuples within each range, and then
that will be filtered by the automata state based on
its buffered data. This approach corresponds to the
baseline techniques, e.g., a CEP algorithm loosely
stacked over a STDB system. In this case, no op-
timizations can be performed across the queries. In
contrast, STEPQ can provide feedback from the au-
tomata states to the base queries to control their exe-
cution. Figure 7 shows that the number of interme-
diate tuples in the states’ buffers is very large and
proportionally increasing as the query size increases.
Most of these tuples are not actually needed because
whatever base queries 2 and 3 report are not neces-
sarily satisfied State 1 in the automata. In contrast,
when STEPQ establishes a feedback from State 1 out-
put to feed the 2
nd
base query, and the same between
State 2 output and the 3
rd
base query (labeled “Feed-
back” in Figure 7), the number of tuples reported from
these base queries is reduced dramatically. This is be-
cause, each base query is only looking for and report-
ing the tuples that are already satisfied the preceding
automata state.
In Figure 8, we measured the effect of interme-
diate tuples and the extra time needed for processing
them. In the experiment, we allow the system to first
run for 10 mins to reach a steady state, and then we
measure the execution time with each new event. We
collect this measurement for 100 consecutive execu-
tions, and present the average of these measurements
in Figure 8. The results show that under the naive
approach the system send significant time processing
intermediate tuples not contributing to the final an-
swer. With the feedback mechanism in STEPQ, the
execution time is reduced by an 8x factor.
The performance of Q4 is studied in Figures 9
and 10. This query is distinct from Q1 in that it re-
quires a synchronization and transformation operators
over the two involved base queries (Refer to Figure 4).
In Figure 9, we study the overheads involved in these
two operations (for each execution) during the query
lifetime, i.e., we measure the time taken by either of
the synchronization or transformation over each ex-
ecution, and then we report the average value. As
illustrated in the figure, the synchronization is more
expensive than the transformation operator as it has to
wait to receive the input from both queries, and then
pass them to the next operator. The results also con-
firm that although both base queries are triggered at
the same time, they are not necessarily producing the
outputs at the same time. The transformation opera-
tor in our example is a simple intersect operator that
involves low overhead as depicted in Figure 9.
!"
#!"
$!!"
$#!"
%!!"
%#!"
&!!"
&#!"
'!!"
!($" !(%" !('" !()"
!"#$%&'()*+,$-./'$0/1'(2$
3.4'$+5$67'$8)'9:$;<,#'$$
!"'9<#'$%&'()*+,$-./'$="'9$>??$3,<@17+61$
A<."'$
B''CD<(E$
Figure 8: Avg Snapshot Execution Time in Query Q1.
!"
#"
$"
%"
&"
'!"
'#"
'" #" (" $" )" %" *" &" +" '!" ''" '#" '(" '$" ')" '%" '*" '&" '+" #!" #'" ##" #(" #$"
!"#$%&#'(%
)*+,*+%-.'+/.0$%
1/'$%2*$34%54.0637."8/97.%/.:%!3/.';73#/97.%
!"#$%&'"(#)*'$+
,-$./"'$*0#)*'$+
Figure 9: Synchronization & Transformation Overheads (in
each execution) in Query Q4.
!"
#!"
$!"
%!"
&!"
'!"
#!" $!" &!" (!"
!"!#$!!%&'()*!
+&,-).!#$!+)/.)*%!+)012-#.!345!
6&%'&%!708)!9*:!;/<!=&>).!
)*+,*+"-.*/+"
012"3*45657"8/"9*+.:1+1";+1+5"
Figure 10: Throughput and Buffer Size in Query Q4.
The experiment in Figure 10 study the effect of
varyingthe parameter K (the number of nearest neigh-
bors reported from each query) on the number of tu-
ples produced in the output or buffered in the au-
tomata state for the persistency test. As expected,
as K increases the chances of finding intersection be-
tween the produced output from the base queries are
increases. The Output Count (blue line) indicates the
total number of reported tuples of the simulated run
for 15 minutes. In contrast, the Max Buffered (dot-
ted black line) indicate the maximum number of tu-
ples buffered in the automata state before either re-
porting or discarding each one. This results show that
the memory requirements of the automata state in this
query is very small.
ComplexPattenProcessinginSpatio-temporalDatabases
167

9 CONCLUSION
We presented the STEPQ system for efficiently man-
aging and executing complex spatio-temporal pattern
queries. The unique features of STEPQ include: co-
herent integration between spatio-temporal queries
and CEP queries, centralized module for optimizing
both query types and providing cross-cutting opti-
mization between them, and the extensibility feature
that enables expressing complex patterns beyond the
built-in operations. The system is still under devel-
opment and we are working on adding additional ex-
tension and optimizations, which include: extending
its language, shared execution among pattern queries,
and optimizing synchronized queries.
REFERENCES
Adaikkalavan, R. and Chakravarthy, S. (2003). SnoopIB:
Interval-based event specification and detection for
active databases. In Proceedings of ADBIS, pages
190–204.
Aguilera, M., Strom, R., Sturman, D., Astley, M., and
Chandra, T. (1999). Matching events in a content-
based subscription system. In Proceedings of Prin-
ciples of Distributed Computing.
Ali, M. H., Mokbel, M. F., and Aref, W. G. (2007).
Phenomenon-aware StreamQuery Processing. In Pro-
ceedings of the International Conference on Mobile
Data Management, MDM.
Arasu, A., Babu, S., and Widom, J. (2003). CQL: A lan-
guage for continuous queries over streams and rela-
tions. In DBPL, pages 1–19.
Behr, T. and Guting, R. H. (2005). Fuzzy Spatial Objects:
An Algebra Implementation in SECONDO. In In Pro-
ceedings of the International Conference on Data En-
gineering, ICDE, page 1137 1139.
Benetis, R., Jensen, C. S., Karciauskas, G., and Saltenis., S.
(2002). Nearest Neighbor and Reverse Nearest Neigh-
bor Queries for Moving Objects. In Proceedings of the
International Database Engineering and Applications
Symposium, IDEAS, pages 44–53.
Brinkhoff, T. and Str, O. (2002). A framework for generat-
ing network-based moving objects. Geoinformatica,
6:2002.
Cai, Y., Hua, K. A., and Cao., G. (2004). Processing
Range-Monitoring Queries on Heterogeneous Mobile
Objects. In Proceedings of the International Confer-
ence on Mobile Data Management, MDM.
Carey, M., Livny, M., and Jauhari, R. (1988). The HiPAC
project: Combining active databases and timing con-
straints. SIGMOD Record, 17(1).
Chakravarthy, S., Krishnaprasad, V., Anwar, E., and Kim,
S. (1994). Composite Events for Active Databases:
Semantics, Contexts and Detection. In VLDB, pages
606–617.
Chandrasekaran, S., Cooper, O., Deshpande, A., Franklin,
M., Hellerstein, J., Hong, W., and et al. (2003). Tele-
graphCQ: Continuous dataflow processing for an un-
certain world. In CIDR.
Chen, Y. and Patel, J. M. (2007). Efficient Evaluation of
All-Nearest-Neighbor Queries. In In Proceedings of
the International Conference on Data Engineering,
ICDE, page 10561065.
Cheng, R., Zhang, Y., Bertino, E., and Prabhakar., S.
(2006). Preserving User Location Privacy in Mobile
Data Management Infrastructures. In In Proceedings
of Privacy Enhancing Technology Workshop.
Choi, Y.-J. and Chung., C.-W. (2002). Selectivity Estima-
tion for Spatio-temporal Queries to Moving Objects.
In Proceedings of the ACM International Conference
on Management of Data, SIGMOD, page 440451.
Cugola, G. and Margara, A. (2012). Processing flows of
information: From data stream to complex event pro-
cessing. ACM Comput. Surv., 44(3):15:1–15:62.
Demers, A., Gehrke, J., Hong, M., Riedewald, M., and
et al. (2006). Towards expressive publish/subscribe
systems. In EDBT, pages 627–644.
Dieker, S. and Guting., R. H. (2000). Plug and Play with
Query Algebras: SECONDO- A Generic DBMS De-
velopment Environment. In Proceedings of the In-
ternational Database Engineering and Applications
Symposium, IDEAS, page 380392.
Elmongui, H. G., Mokbel, M. F., and Aref., W. G. (2005).
Spatio-temporal Histograms. In Proceedings of the
International Symposium on Advances in Spatial and
Temporal Databases, SSTD, page 1936.
Fabret, F., Jacobsen, H., Llirbat, J., Ross, K., and Shasha,
D. (2001). Filtering algorithms and implementation
for very fast publish/subscribe systems. In SIGMOD,
pages 115–126.
Gedik, B. and Liu., L. (2004). MobiEyes: Distributed Pro-
cessing of Continuously Moving Queries on Moving
Objects in a Mobile System. In Proceedings of the In-
ternational Conference on Extending Database Tech-
nology, EDBT.
Gehani, N., Jagadish, H., and Shmueli, O. (1992). Compos-
ite Event Specification in Active Databases: Model
and Implementation. In VLDB, pages 327–338.
Hu, H., Xu, J., and Lee., D. L. (2005). A Generic Frame-
work for Monitoring Continuous Spatial Queries over
Moving Objects. . In Proceedings of the ACM Interna-
tional Conference on Management of Data, SIGMOD,
page 479490.
Kanoulas, E., Du, Y., Xia, T., and Zhang., D. (2006). Find-
ing Fastest Paths on A Road Network with Speed Pat-
terns. . In Proceedings of the International Conference
on Data Engineering, ICDE.
Lerner, A. and Shasha, D. (2003). AQuery: Query Lan-
guage for Ordered Data, Optimization Techniques,
and Experiments. In VLDB, pages 345–356.
Marios Hadjieleftheriou ad George Kollios, D. G. and Tso-
tras., V. J. (2003). On-Line Discovery of Dense Areas
in Spatio-temporal Databases. . In Proceedings of the
International Symposium on Advances in Spatial and
Temporal Databases, SSTD, page 306324.
Mokbel, M. F., Xiong, X., and Aref., W. G. (2004a).
SINA: Scalable Incremental Processing of Continuous
DATA2014-3rdInternationalConferenceonDataManagementTechnologiesandApplications
168

Queries in Spatio-temporal Databases. . In Proceed-
ings of the ACM International Conference on Man-
agement of Data, SIGMOD, page 443454.
Mokbel, M. F., Xiong, X., Hammad, M. A., and Aref, W. G.
(2004b). Continuous query processing of spatio-
temporal data streams in place. In STDBM, pages 57–
64.
Mouratidis, K., Papadias, D., and Papadimitriou., S. (2005).
Medoid Queries in Large Spatial Databases. . In Pro-
ceedings of the International Symposium on Advances
in Spatial and Temporal Databases, SSTD, page 5572.
Mukherji, A., Rundensteiner, E. A., Brown, D. C., and
Raghavan, V. (2008). SNIF TOOL: sniffing for pat-
terns in continuous streams. In CIKM, pages 369–378.
Nehme, R. and Rundensteiner., E. (2006). SCUBA: Scal-
able Cluster-Based Algorithm for Evaluating Contin-
uous Spatio-Temporal Queries on Moving Objects. In
Proceedings of the International Conference on Ex-
tending Database Technology, EDBT, page 10011019.
Shahabi, C., Kolahdouzan, M. R., and Sharifzadeh., M.
(2003). A Road Network Embedding Technique
for K-Nearest Neighbor Search in Moving Object
Databases. . GeoInformatica, 7(3):255273.
Wolfson, O., Sistla, A. P., Xu, B., Zhou, J., and Chamber-
lain., S. (1999). DOMINO: Databases for Moving Ob-
jects tracking (Demo). In Proceedings of the ACM In-
ternational Conference on Management of Data, SIG-
MOD, page 547549.
Wu, E., Diao, Y., and Rizvi, S. (2006). High-performance
complex event processing over streams. In Proceed-
ings of the ACM SIGMOD international conference
on Management of data, pages 407–418.
Xiao, D. and Eltabakh, M. (2013). STEPQ: Spatio-temporal
Engine for Complex Pattern Queries. In Interna-
tional Conference on Advances in Spatial and Tem-
poral Databases (SSTD), pages 386–390.
Xiong, X., Mokbel, M. F., and Aref., W. G. (2005). SEA-
CNN: Scalable Processing of Continuous K-Nearest
Neighbor Queries in Spatio-temporal Databases. . In
Proceedings of the IEEE International Conference on
Data Engineering, ICDE, page 643654.
Xiong, X., Mokbel, M. F., and Aref., W. G. (2006). LU-
Grid: Update-tolerant Grid-based Index- ing for Mov-
ing Objects. . In Proceedings of the International Con-
ference on Mobile Data Management, MDM, pages
13–21.
Yiu, M. L., Ghinita, G., Jensen, C. S., and Kalnis, P. (2009).
Outsourcing Search Services on Private Spatial Data.
In ICDE, pages 1140–1143.
ComplexPattenProcessinginSpatio-temporalDatabases
169
