
Multi-Agent Control System
Atef Gharbi
1
, Hamza Gharsellaoui
2
and Samir Ben Ahmed
3
1
Department of Computer Sciences, INSAT, Tunis, Tunisia
2
Department of Computer Sciences, ESTI, Tunis, Tunisia
3
Department of Computer Sciences, FST, Tunis, Tunisia
Keywords:
Multi-agent System, Distributed Planning, JADE Platform.
Abstract:
The paper deals with distributed planning in a Multi-Agent System (MAS) constituted by several intelligent
agents each one has to interact with the other autonomous agents. The problem faced is how to ensure a
distributed planning through the cooperation in our multi-agent system. Finally, we use JADE platform to
create agents and ensure the communication between them.
A Benchmark Production System is used as a running example to explain our contribution.
1 INTRODUCTION
While Multi-Agent System (MAS) is a concept
mainly used in research (xia Dou et al., 2014), by
adapting it we must face various problems, some of
which are serious enough to place the utility of MAS
in the doubt. Since we wish to use the MAS in large
scales, concurrent systems, and since we wish to ad-
dress not very frequent, but demanding problems (Liu
et al., 2014), MAS can become arbitrarily complex if
MAS can not provide guarantees which help to or-
der the system and ensure the progression of the total
application. We can not pretend the unicity nor the
exactitude of an agent definition, however the most
adapted one presented by (Ferber, ) where an agent
is defined as a physical or virtual entity (i) which is
capable of acting in an environment; (ii) which can
communicate directly with other agents; (iii) which is
drivenby a set of tendencies (in the form of individual
objectives or of a satisfaction/survival function which
it tries to optimize); (iv) which possesses resources of
its own; (v) which is capable of perceiving its envi-
ronment (but to a limited extent); (vi) which has only
a partial representation of its environment (and per-
haps none at all); (vii) which possesses skills and can
offerservices; (iix) which may be able to reproduceit-
self; (ix) whose behaviour tends towards satisfying its
objectives, taking account of the resources and skills
available to it and depending on its perception, its rep-
resentation and the communications it receives.
In MAS, distributed planning is considered as a
very complex task (Jung and Zelinsky, ), (Sapena
et al., 2008). In fact, distributed planning ensures how
the agents should plan to work together, to decom-
pose the problems into subproblems, to assign these
subproblems, to exchange the solutions of subprob-
lem, and to synthesize the whole solution which itself
is a problem that the agents must solve (Ferrando and
Onaindia, 2013), (Forget et al., 2008), (Ghallab et al.,
2014). The actions of the other agents can induce a
combinatorial explosion in the number of possibili-
ties which the planner will have to consider, returning
the space of research and the size of solution expo-
nentially larger. There are several techniques to re-
duce data-processing complexity of planning interac-
tions with other agents including (Au et al., ): (i) di-
viding states in the classes of equivalence, (ii) reduc-
ing search space into states which are really required.
(iii) planning on line, i.e., eliminating the possibilities
which do not emerge during the execution of plan.
This article is concerned with two important mat-
ters: how to define the MAS in a manner such that
it has more utility to deploy it, and how to use such
a MAS for the advanced software. The MAS must
discover the action to be taken by supervising the ap-
plication and its environment and analyzing the data
obtained.
With MAS, we face two important matters: (i)
the detection of a need for action. the need for ac-
tion must be discovered by supervising the applica-
tion and its environment and analyzing data obtained.
(ii) the planning of the action. It consists to envisage
the action (by proposing which modifications need to
be made) and by programming it. In practice, the op-
posite dependency also requires consideration: Only
those situations which can be repaired by an action
taken which can really be planned should be consid-
ered during the analysis.
117
Gharbi A., Gharsellaoui H. and Ben Ahmed S..
Multi-Agent Control System.
DOI: 10.5220/0005001101170124
In Proceedings of the 9th International Conference on Software Engineering and Applications (ICSOFT-EA-2014), pages 117-124
ISBN: 978-989-758-036-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

This paper introduces a simple Benchmark Pro-
duction System that will be used throughout this arti-
cle to illustrate our contribution which is developped
as agent-based application. We implement the Bench-
mark Production System in a free platform which
is JADE (JavaTM Agent DEvelopment) Framework.
JADE is a platform to develop multi-agent systems
in compliance with the FIPA specifications (Vitabile
et al., 2009), (Su and Wu, 2011), (Bordini and all.,
2006).
In the next section, we present the Benchmark
Production System. The third section introduces the
formal representation of agent behavior. The fourth
section presents the creation of JADE agents. We con-
clude in the last section.
2 BENCHMARK PRODUCTION
SYSTEM
As much as possible, we will illustrate our contribu-
tion with a simple current example called RARM (Hrz
and Zhou, 2007). We begin with the description of it
informally, but it will serve as an example for various
formalism presented in this article. The benchmark
production system RARM represented in the figure 1
is composed of two input and one output conveyors,
a servicing robot and a processing-assembling center.
Workpieces to be treated come irregularly one by one.
The workpieces of type A are delivered via conveyor
C1 and workpieces of the type B via the conveyorC2.
Only one workpiece can be on the input conveyor.
A robot R transfers workpieces one after another to
the processing center. The next workpiece can be put
on the input conveyor when it has been emptied by
the robot. The technology of production requires that
first one A-workpiece is inserted into the center M and
treated, then a B-workpiece is added in the center, and
last the two workpieces are assembled. Afterwards,
the assembled product is taken by the robot and put
above the C3 conveyerof output. the assembled prod-
uct can be transferred on C3 only when the output
conveyor is empty and ready to receive the next one
produced.
Traditionally, the RARM systems are directly con-
trolled by a central server. The server proposes the
schedule for the system as a whole and dispatches
commands to the robots. This results is reliable and
predicable solutions. The central point of control also
allows an easier diagnosis of the errors. However,
a variation in user’s needs leads to change the cen-
tralized architecture. Customers ask more and more
for self-management system, i.e., systems that can
adapt their behavior with changing circumstances in
A
Conveyor C1
A
B
C
o
n
v
e
y
o
r
C
3
B
Conveyor C2
Position p1
Position p2
Position p3 Position p4
P
osit
io
n
p
5
P
o
sitio
n
p6
Robot r
Processing unit
M
Figure 1: The benchmark production system RARM.
an autonomous way. Self-management with regard
to the dynamics of system needs two specific qual-
ity requirements : flexibility and openess. Flexibility
refers to the capacity of the system to treat dynamic
operating conditions. The openess refers to the ca-
pacity of the system to treat robots leaving and enter-
ing system. To treat these new quality requirements,
a radically new architecture was conceived based on
multi-agent systems (Figure 2). Applying a situated
multi-agent system opens perspective to improve the
flexibility and the openess from the system: the robots
can adapt to the current situation in their vicinity, or-
der assignment is dynamic, the system can therefore
treat in an autonomous way the robots leaving and
reentring the system, etc. However, a decentralized
architecture can lead to a certain number of implica-
tions, in particular distributed planning can have an
impact on the total efficiency of the system. In fact,
this critical topic must be considered during the de-
sign and development of multi-agent system.
Parts bin Parts bin
Assembly
area
ComputerComputer
Network connection
Figure 2: The distributed Production system.
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
118
3 THE FORMAL
REPRESENTATION OF AGENT
We can define a Multi-Agent System (Ferber, ) as (i)
An environment E, that is, a space which generally
has volume; (ii) A set of objects, O. These objects
are situated, that is to say, it is possible at a given
moment to associate any object with a position in E;
(iii) An assembly of agents, A, which are specific ob-
jects (a subset of O), represent the activeentities in the
system; (iv) An assembly of relations, R, which link
objects (and therefore, agents) to one another; (v) An
assembly of operations, Op, making it possible for the
agents of A to perceive, produce, transform, and ma-
nipulate objects in O; (vi) Operators with the task of
representing the application of these operations and
the reaction of the world to this attempt at modifica-
tion, which we shall call the laws of the universe.
Running Example
For instance, if we consider RARM:
E = the physical space
A = the robots
O = other robots + objects (pieces,...)
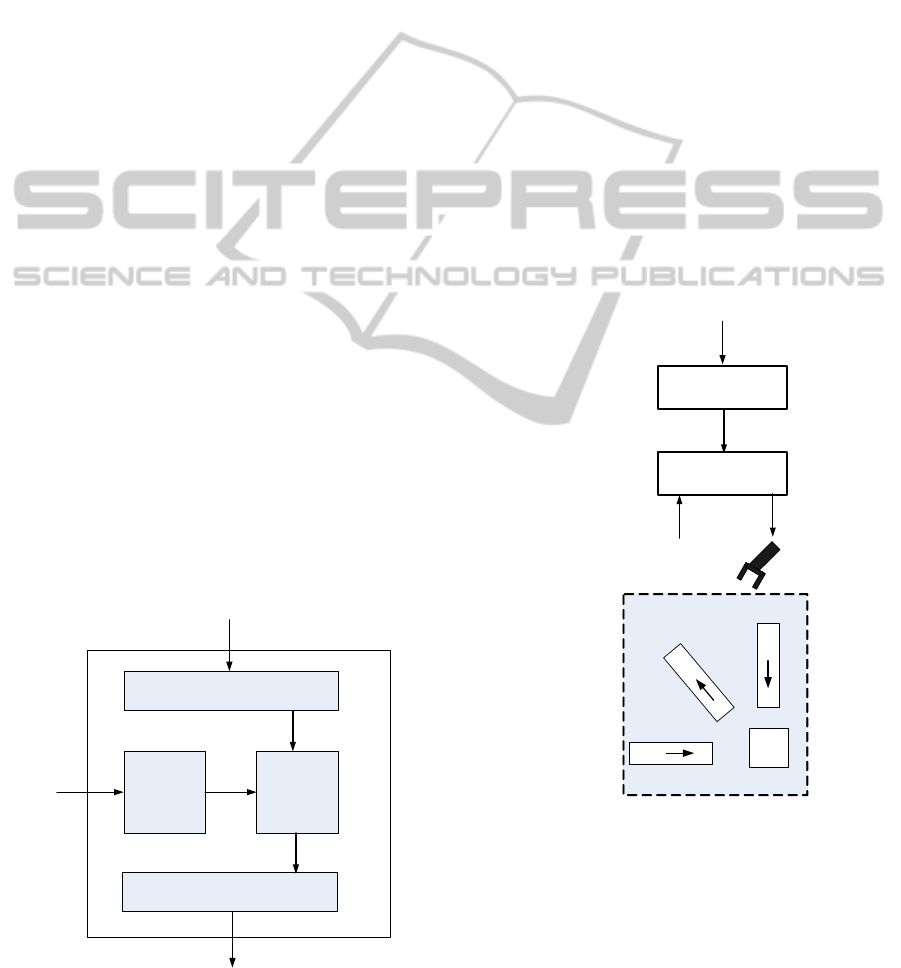
3.1 Agent Conception
Perception is responsible for collecting runtime in-
formation from the virtual environment. The per-
ception component supports selective perception, en-
abling an agent to direct its perception to its current
tasks. The perception component interprets the repre-
sentation resulting in a percept. A percept consists of
data elements that can be used to update the agent’s
current knowledge (Figure 3).
Communication
Current
knowledge
Decision making
Perception
Send / Receive
Actuator
Sensor
Figure 3: Interaction Agent.
The Decision making component encapsulates a
behavior-basedaction selection mechanism. Decision
making is responsible for realizing the agent’s tasks
by invoking actions in the virtual environment. To en-
able situated agents to set up collaborations, behavior-
based action selection mechanisms are extended with
the notions of role and situated commitment.
Communication is responsible for communicative
interactions with other agents. Message exchange
enables agents to share information directly and set
up collaborations. The communication module pro-
cesses incoming messages and produces outgoing
messages according to well-defined communication
protocols.
3.2 Formal Representation
Figure 4 shows a conceptual model of AI planning.
The three components include (i) the planner, (ii) the
plan-execution agent, and (iii) the world in which the
plans are to be executed (the formal representation is
based on the work (Ghallab et al., 2004).
Planner
Plan-execution
Agent
plan
actionsobservations
The world in which
the agent operates
A
Conveyor
C1
A
B
C
o
n
v
e
y
o
r
C
3
B
Conveyor
C2
Processing
unit M
Description of the world ,
the initial state and the
objectives
Figure 4: The Conceptual Model Planning.
The planner’s input includes descriptions of Σ, the
initial state(s) that Σ might be in before the plan-
execution agent performs any actions, and the desired
objectives (e.g., to reach a set of states that satisfies a
given goal condition, or to perform a specified task,
or a set of states that the world should be kept in or
kept out of, or a partially ordered set of states that we
might want the world to go through). If the planning
Multi-AgentControlSystem
119

is being done online (i.e., if planning and plan execu-
tion are going on at the same time), the planner’s input
will also include feedback about the current execution
status of the plan or policy. The planner’s output con-
sists of either a plan (a linear sequence of actions for
the agent to perform) or a policy (a set of state-action
pairs with at most one action for each state).
A classical planning problem is one that satisfies
a very restrictive set of assumptions:
State-transition Model. The world is a finite state-
transition system, i.e., a triple Σ = (S; A; γ), where
S is a finite set of states, A is a finite set of actions,
γ : S × A 7−→ 2
S
is a state-transition function. If
γ(s; a) 6= ⊘ ; then we say that a is applicable to s
or executable in s.
Full Observability. Σ’s current state is always com-
pletely knowable.
Determinism. For every s and a, |γ(s;a) ≤ 1|. In
other words, if a is applicable to s, then there is
exactly one possible outcome, namely the state in
γ(s;a). Furthermore, there is exactly one initial
state s
0
that will be Σ’s current state before plan-
execution begins.
Single Agency. The plan-execution agent is the only
agent capable of making any changes in the world.
If it were not for this agent’s actions, the world
would be static.
Achievement Goals and Sequential Plans. The
planner’s objective is to produce a plan (i.e., a
linearly ordered finite sequence of actions) that
puts Σ into any one of some finite set of states S
g
.
Implicit Time: Actions have no duration; they are
instantaneous state tran- sitions.
Offline Planning. The planner produces a complete
plan for the given initial and goal states prior to
any execution of its plan by the plan-execution
agent. In multi-agent systems, Assumption 4 does
not hold, and several of the other assumptions
may not necessarily hold.
Running Example
According to figure 5 :
• A set of positions {p
1
, p
2
,...} : A position is used
to localise the workpiece A, B or AB;
• A set of robots {r
1
, r
2
, ...} : Each robot transfers
a workpiece one after one to be processed;
• A set of workpieces of type A {a
1
,a
2
, ...};
• A set of workpieces of type B {b
1
,b
2
, ...};
• A set of workpieces of type AB {ab
1
,ab
2
, ...};
A Position
p1
Position
p2
Robot r
Processing
unit M
S
0
move_back1
move1
take put
take
put
A
Conveyor
C1
C
o
n
v
e
y
o
r
C
3
Conveyor
C2
Position
p1
Position
p2
Robot r
Processing
unit M
S
1
A
Position
p1
Position
p2
Robot r
Processing
unit M
S
3
Position
p1
Position
p2
Robot r
Processing
unit M
A
S
4
Conveyor
C1
C
o
n
v
e
y
o
r
C
3
Conveyor
C2
Conveyor
C2
Conveyor
C2
Conveyor
C1
Conveyor
C1
C
o
n
v
e
y
o
r
C
3
C
o
n
v
e
y
o
r
C
3
Figure 5: A state-transition for RARM.
• A set of conveyors {C
1i
, C
2i
, C
3i
}; : A conveyor
C
1i
(resp. C
2i
, C
3i
) is responsible for transfering
set of workpieces of type A (resp B, AB);
• A set of processing Centers M {M
1
, M
2
,...} : first
one A-workpiece is inserted into M and processed,
then one B-workpiece is added into the center M,
and last both workpieces are assembled.
The set of states is {s
0
, s
1
, s
2
, s
3
, s
4
, s
5
, s
6
, s
7
, s
8
,
s
9
, s
10
, s
11
} where :
• s
0
(resp. s
4
, s
10
) is meaning a workpiece of type
A (resp. B, AB) is at position p1 (resp. p3, p5);
• s
1
(resp. s
5
, s
11
) is meaning a workpiece of type A
(resp. B, AB) is at position p2 (resp. p4, p6);
• s
2
(resp. s
6
, s
9
) is meaning a workpiece of type A
(resp. B, AB) is taken by the robot r;
• s
3
(resp. s
7
, s
8
) is meaning a workpiece of type A
(resp. B, AB) is put in the processing unit M.
There are nine possible actions in the domain.
• a workpiece of type A is trasnported from position
p1 to position p2;
• the robot transports a workpiece of type A;
• the piece is put in the processing unit M;
• a workpiece of type B is trasnported from position
p3 to position p4;
• the robot transports a workpiece of type B;
• the piece is put in the processing unit M;
• the robot picks up the assembled piece;
• the assembled piece is put on the conveyor C3;
• a workpiece of type AB is trasnported from posi-
tion p5 to position p6.
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
120

The set of actions is {move
1
, move
2
,
move
3
, move
4
, move
5
, move
6
, take
1
,take
2
,take
3
,
load
1
, load
2
,load
3
, put
1
,put
2
,put
3
,
process
1
,process
2
,process
3
} where :
• move
1
(resp. move
2
) is meaning a workpiece of
type A is transported from position p
1
(resp. p
2
)
to position p
2
(resp. p
1
);
• move
3
(resp. move
4
) is meaning a workpiece of
type B is transported from position p
3
(resp. p
4
)
to position p
4
(resp. p
3
);
• move
5
(resp. move
6
) is meaning a workpiece of
type AB is transported from position p
5
(resp. p
6
)
to position p
6
(resp. p
5
);
• take
1
(resp. take
2
, take
3
) is meaning the opera-
tion of taking a workpiece of type A (resp. B ,
AB);
• load
1
(resp. load
2
,load
3
) is meaning the fact of
loading a workpiece of type A (resp. B , AB);
• put
1
(resp. put
2
, put
3
) is meaning the operation
of putting a workpiece of type A (resp. B , AB);
• process
1
(resp. process
2
, process
3
) is meaning
the fact of processing a workpiece of type A (resp.
B , AB).
The current configuration of the domain is de-
noted using instances of the following predicates,
which represent relationships that change over time.
• occupied(c
1
) (resp. occupied(c
2
), occupied(c
3
)):
conveyer c1 (resp. c2, c3) is already occupied by
a workpiece of type A (resp. B, AB);
• empty(c1) (resp. empty(c2), empty(c3)): conveyer
c1 (resp. c2, c3) is already ready to transport a
workpiece of type A (resp. B, AB);
• at(r,p2) (resp. at(r,p4), at(r,p5)): Robot r is cur-
rently at position p2 (resp. p4, p5);
• loaded(r, a) (resp. loaded(r, b), loaded(r, ab)) :
Robot r is currently loading the workpiece a (resp.
b, ab) of type A (resp. B, AB);
• put(r, a) (resp. put(r, b),put(r, ab)): Robot r is
currently putting the workpiece a (resp. b, ab) of
type A (resp. B, AB);
• empty(r): the robot r is empty;
• empty(a) (resp. empty(b), empty(ab)): there is no
workpiece of type A (resp. B, AB).
NB Events are not chosen or triggered. If e is an
event and γ(s, e) is not empty, then e can possibly oc-
cur when the system is in state s.
Given a state transition system Σ, the purpose of
planning is to find which actions to apply to which
states in order to achieve some objectives when start-
ing from a given situation. A plan is a structure that
gives the appropriate actions. The objective can be
specified by a goal state s
g
or a set of goal states
S
g
. The objective can be obtained by any sequence
of state transitions that ends at one of the goal states.
Running Example
If we want to have workpieces in the processing unit
M, then the set of goal states is S
g
= {s
3
,s
7
,s
8
}
Plan: is any sequence of actions π = ( a
1
, ...,
a
k
), where k ≥ 0. The length of the plan is |π| = k, the
number of actions. If π1 = (a
1
, .. .,a
k
) and π2 = (a
′
1
,
.. ., a
′
j
) are plans, then their concatenation is the plan
π1.π2 = ( a
1
, ... , a
k
, a
′
1
, ...,a
′
j
). The state produced
by applying π to a state s is the state that is produced
by applying the actions of π in the order given.
The plan π is executable in a state s
0
if there is a se-
quence of states (s
0
; s
1
; . . . ; s
n
) such that for i = 1;
. . . ; n, s
i
= γ(s
i−1
;a
2
). In this case we say that (s
0
; s
1
;
.. .; s
n
) is π’s execution trace from s
0
, and we define
γ(s
0
;π) = s
n
. If s
n
satisfies the goal g, then we say
that π is a solution for the planning problem P = (O;
s
0
; g).
Running Example
if s
0
and g = {workpiece in the processing unit}. Let:
• π0 : (move
1
, take
1
, load
1
, process
1
)
• π1 : (load
1
, put
1
, process
1
, move
2
)
• π2 : (move
1
, take
1
, load
1
, put
1
, process
1
, move
2
)
Then π0 is not a solution because although it is
applicable to s
0
, the resulting state is not a goal state;
π1 is not a solution because it is not applicable to so;
π3 is the only solution.
4 CREATING JADE AGENTS
JADE is a Java tool and therefore creating a JADE-
based multi-agent system requires creating Java
classes. For more details, we refer to (Bellifem-
ine et al., 2010b), (Caire, 2009), (Bellifemine et al.,
2010a), (Bellifemine et al., 2004). Creating a JADE
agent is very easy through defining a class that ex-
tends the jade.core.Agent class and implementing the
setup() method. Each class introduced in the Figure
6 will be presented in the following paragraphs.
Running Example
The setup() method is invoked when agent starts run-
ning and permits to initialize instance variables, reg-
ister agent and attach one or more behaviors to the
agent.
import jade.core.Agent;
public class Robot extends Agent {
protected void setup() {
System.out.println(”Hello everybody! I am an
Multi-AgentControlSystem
121

Agent
+ addBehaviour (b:Behaviour ) : Void
+ blockingReceive () : ACLMessage
+ doDelete () : Void
+ receive () : ACLMessage
+ receive (mt :MessageTemplate ) : ACLMessage
+ removeBehaviour (b:Behaviour ) : Void
+ send (m:ACLMessage ) : Void
+ setup () : Void
+ takeDown () : Void
Behavior
0 .. *
ACLMessage
+ addReceiver (a:AID ) : Void
+ createReply () : ACLMessage
+ getSender () : AID
+ setContent (c:String ) : Void
+ setLanguage (l:String ) : Void
+ setOntology (o:String ) : Void
+ setPerformative (type :Integer ) : Void
+ action () : Void
+ block () : Void
+ done () : Boolean
AID
+ getName () : string
1
1
1
Figure 6: JADE agent.
agent”);
}
}
4.1 Agent Identifier
Each agent is identified by an agent identifier repre-
sented as an instance of the jade.core.AID class. The
getAID() method of the Agent class allows retrieving
the agent identifier. An AID object includes a globally
unique name plus a number of addresses. The name in
JADE has the form < nickname > @ < plat form −
name > so that an agent called Robot1 living on a
platform called RARM will have Robot1@RARM as
globally unique name. The addresses included in the
AID are the addresses of the platform the agent lives
in. These addresses are only used when an agent
needs to communicate with another agent living on
a different platform.
4.2 Agent Discovery
The JADE platfrom allows the possibility to dis-
cover dynamically the available agents. To do so, a
yellowpages service permits agents to describe one
or more services they provide. An agent can register
(publish) services and search to discover services.
Running Example
In order to publish a service, an agent must cre-
ate a proper description which is an instance of
DFAgentDescription class and call the register()
method of DFService class.
/// Register the Robot in DFService DFAgentDescrip-
tion dfd = new DFAgentDescription();
dfd.setName(getAID());
ServiceDescription sd = new ServiceDescription();
sd.setType(”Robot”);
sd.setName(”Robot-executing”);
dfd.addServices(sd);
try {
DFService.register(this, dfd);
}
catch (FIPAException fe) {
fe.printStackTrace();
}
It is possible to search some agents, if the agent
provides the DF with a template description. The
result of the research is a list of all the descriptions
matching the template.
Running Example
The search() method of the DFService class ensures
the result.
DFAgentDescription template = new DFAgentDe-
scription();
ServiceDescription sd = new ServiceDescription();
sd.setType(”Robot”);
template.addServices(sd);
DFAgentDescription[] result ;
try {
do
{
result = DFService.search(myAgent, template);
robotAgents = new AID[result.length];
for (int i = 0; i < result.length; i++) {
robotAgents[i] = result[i].getName();
}
}
while (result.length <= 0);
}
catch (FIPAException fe) {
fe.printStackTrace();
}
nbRobots=robotAgents.length;
4.3 Message Exchanged between JADE
Agents
Agents never interact through method calls but by ex-
changing asynchronous messages. Obviously, inter-
agent interaction will be very difficult until all agents
adopt the same communication language, and fortu-
nately ACL standards ensure this requirement. All
JADE agents communicate using messages that obey
the FIPA ACL specification, which is described in :
http//www.fipa.org.
This format comprises a number of fields and in par-
ticular: (1) the sender of the message, (2) the list
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
122

of receivers, (3) the communicative intention (also
called performative indicating what the sender in-
tends to achieve by sending the message (for exam-
ple the performative can be REQUEST, INFORM,
QUERY
IF, CFP (call for proposal), PROPOSE, AC-
CEPT PROPOSAL, REJECT PROPOSAL, and so
on). (4) The content i.e. the actual information in-
cluded in the message which may be string in simple
cases; otherwise we need a content language, a corre-
sponding ontology, and a protocol. (5) The ontology
i.e. the vocabulary of the symbols used in the content
and their meaning (both the sender and the receiver
must be able to encode expressions using the same
symbols to be sure that the communication is effec-
tive)
4.3.1 Sending a Message
Sending a message to another agent is as simple as
filling the fields of an ACLMessage object and then
call the send() method of the Agent class. The code
below informs an agent whose nickname is Robot1
that the production must be decreased.
Running Example
ACLMessage msg = new ACLMes-
sage(ACLMessage.INFORM);
msg.addReceiver(new AID(”Robot1”,
AID.ISLOCALNAME));
msg.setOntology(”Production”);
msg.setContent(”We must decrease in the produc-
tion”);
send(msg);
4.3.2 Receiving a Message
As mentioned above the JADE runtime automati-
cally posts messages in the receiver’s private message
queue as soon as they arrive. An agent can pick up
messages from its message queue by means of the
receive() method. This method returns the first mes-
sage in the message queue (removing it) or null if the
message queue is empty and immediately returns.
Running Example
ACLMessage msg = receive();
if (msg ! = null) {
// Process the message
}
4.3.3 Blocking Behavior Waiting a Message
Some behaviors must be continuously running and at
each execution of their action() method, must check
if a message is recceived and perform some action.
Running Example
public void action() {
ACLMessage msg = myAgent.receive();
if (msg ! = null) {
// Message received. Process it
.. .
}
else {
block();
}
}
4.3.4 Selecting a Message
When a template is specified, the receive() method
returns the first message (if any) matching it,
while ignores all non-matching messages. Such
templates are implemented as instances of the
jade.lang.acl.MessageTemplate class that provides
a number of factory methods to create templates in a
very simple and flexible way.
Running Example
The action() method is modified so that the call to
myAgent.receive() ignores all messages except those
whose performative is REQUEST:
public void action() {
MessageTemplate mt = MessageTem-
plate.MatchPerformative(ACLMessage.REQUEST);
ACLMessage msg = myAgent.receive(mt);
if (msg ! = null) {
// REQUEST Message received. Process it
...
}
else {
block();
}
}
5 CONCLUSION
Distributed planning is narrowly interlaced with the
distributed resolution of the problems, being a prob-
lem in itself and means to solve a problem. The main
aim of this paper is how to ensure a distributed plan-
ning in Multi-Agent System (MAS) composed of sev-
eral intelligent autonomous agents able to take the ini-
tiative instead of simply reacting in response to its en-
vironment. We create the MAS through JADE plat-
from and show the interaction between the different
agents through exchanging messages. All our con-
tributions are applied on the benchmark production
system (RARM system).
Multi-AgentControlSystem
123

REFERENCES
Au, T.-C., Kuter, U., and Nau, D. Planning for interactions
among autonomous agents.
Bellifemine, F., Caire, G., and Greenwood, D. (2004). De-
veloping multi-agent systems with jade.
Bellifemine, F., Caire, G., Trucco, T., and Rimassa, G.
(2010a). Jade programmers guide.
Bellifemine, F., Caire, G., Trucco, T., Rimassa, G., and
Mungenast, R. (2010b). Multi-agent-system-based
decentralized coordinated control for large power sys-
tems. Jade Administrators Guide.
Bordini, R. and all. (2006). A survey of programming lan-
guages and platforms for multi-agent systems. Infor-
matica, 30(1):3344.
Caire, G. (2009). Jade tutorial : Jade programming for be-
ginners.
Ferber, J. Multi-agent system: An introduction to dis-
tributed artificial intelligence. Harlow: Addison Wes-
ley Longman.
Ferrando, S. P. and Onaindia, E. (2013). Context-aware
multi-agent planning in intelligent environments. In-
formation Sciences, 227(1):22–42.
Forget, P., DAmours, S., and Frayret, J.-M. (2008). Multi-
behavior agent model for planning in supply chains:
An application to the lumber industry. Robotics and
Computer-Integrated Manufacturing, 24(5):664–679.
Ghallab, M., Nau, D., and Traverso, P. (2004). Automated
planning. International Journal of Electrical Power &
Energy Systems.
Ghallab, M., Nau, D., and Traverso, P. (2014). The actor’s
view of automated planning and acting: A position
paper. Artificial Intelligence, 208(1):1–17.
Hrz, B. and Zhou, M. (2007). Modeling and control of
discrete-event dynamic systems with petri nets and
other tools. page 67.
Jung, D. and Zelinsky, A. An architecture for distributed
cooperative planning in a behaviour-based multi-robot
system. Robotics and Autonomous Systems, 26(2).
Liu, B., Su, H., Li, R., Sun, D., and Hu, W. (2014). Switch-
ing controllability of discrete-time multi-agent sys-
tems with multiple leaders and time-delays. Applied
Mathematics and Computation, 228(1):571–588.
Sapena, O., Onaindia, E., Garrido, A., and Arangu, M.
(2008). A distributed csp approach for collaborative
planning systems. Engineering Applications of Artifi-
cial Intelligence, 21(5):698–709.
Su, C.-J. and Wu, C.-Y. (2011). Jade implemented mo-
bile multi-agent based, distributed information plat-
form for pervasive health care monitoring. Applied
Soft Computing, 11(1):315–325.
Vitabile, S., Conti, V., Militello, C., and Sorbello, F. (2009).
An extended jade-s based framework for developing
secure multi-agent systems. Computer Standards &
Interfaces, 31(5):913–930.
xia Dou, C., wei Hao, D., Jin, B., qian Wang, W., and An, N.
(2014). Multi-agent-system-based decentralized co-
ordinated control for large power systems. Interna-
tional Journal of Electrical Power & Energy Systems,
58:130–139.
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
124
