
Approximate Distance Queries for Path-planning in Massive Point
Clouds
David Eriksson and Evan Shellshear
Fraunhofer-Chalmers Centre, Gothenburg, 412 88, Sweden
Keywords:
Point Clouds, Distance Computation, Path-Planning, Simplification.
Abstract:
In this paper, algorithms have been developed that are capable of efficiently pre-processing massive point
clouds for the rapid computation of the shortest distance between a point cloud and other objects (e.g. tri-
angulated, point-based, etc.). This is achieved by exploiting fast distance computations between specially
structured subsets of a simplified point cloud and the other object. This approach works for massive point
clouds even with a small amount of RAM and was able to speed up the computations, on average, by almost
two orders of magnitude. Given only 8 GB of RAM, this resulted in shortest distance computations of 30
frames per second for a point cloud originally having 1 billion points. The findings and implementations will
have a direct impact for the many companies that want to perform path-planning applications through massive
point clouds since the algorithms are able to produce real-time distance computations on a standard PC.
1 INTRODUCTION
High-resolution point clouds have become very im-
portant in the last decades as researchers have started
to exploit their advantages over triangle-based mod-
els in computer graphics applications (Tafuri et al.,
2012), (Sankaranarayanan et al., 2007). Improve-
ments in scanning technologies make it possible to
easily scan very large objects, thereby making point
clouds more popular than CAD models in certain ap-
plications. This is because point clouds offer the
user the ability to acquire valid representations of the
real state of the environment under consideration and
not just the nominal or planned appearance (Berlin,
2002). Scanned point cloud models are also able to
provide up-to-date information about local changes,
which is often much easier to acquire than updating
a given CAD model. Most importantly, however, for
industrial settings that lack a CAD (or similar) model,
one can scan an entire factory much easier than build-
ing a new CAD model from scratch.
One area where point clouds are useful is in path-
planning, where the core algorithms are based on col-
lision detection and/or the computation of the shortest
distance between a point cloud and an object moving
through the point cloud. The processing and efficient
structuring of massive point clouds is critical in order
to speed-up path-planning algorithms, (Pauly et al.,
2002). The reason for this is that computing the nec-
essary collisions and/or distances is a common bottle-
neck for path-planning algorithms (Bialkowski et al.,
2013).
In certain scenarios, the point clouds used for
path-planning can contain billions of points, (Fr¨ohlich
and Mettenleiter, 2004), making it a challenge to pro-
cess them efficiently. Volvo Cars have scanned their
factories in Torslanda with the resulting point cloud
containing 10 billion points, (Volvo, 2013).
Path-planning through environments consisting of
triangle meshes has been studied intensively and there
exists a significant amount research on the subject
(LaValle, 2006), (Latombe, 1990), (Carlson et al.,
2013), (Spensieri et al., 2013), (Spensieri et al., 2008)
and (Hermansson et al., 2012). Although the area of
path-planning with point clouds is newer, there are
methods designed specifically for it, such as (Landa,
2008) and (Landa et al., 2007). Path-planning through
hybrid environments has also been considered, where
the geometry is a point cloud and the object to be
path-planned is a triangle mesh; such combinations
havebeen studied in (Tafuri et al., 2012), (Sucan et al.,
2010) and (Pan et al., 2011). Hybrid path-planning is
uncommon because of the possibility to triangulate
the point cloud and use path-planning on the result-
ing triangle meshes, (Dupuis et al., 2008). However,
this triangulation process is only of interest for point
clouds smaller than those considered in this paper, for
which the usual algorithms used to triangulate point
20
Eriksson D. and Shellshear E..
Approximate Distance Queries for Path-planning in Massive Point Clouds.
DOI: 10.5220/0005002000200028
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 20-28
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

clouds would be far too cumbersome to be practical,
(Tafuri et al., 2012).
Path-planning can be approached from two dif-
ferent directions either via using collision queries or
distance queries. In this article we focus on path-
planning algorithms that require a fast distance com-
putation. Our results demonstrate the possibility of
speeding up distance queries in order to make path-
planning for massive point clouds feasible. By using
distance queries it is possible to provide more robust
results when path-planning in point clouds such as in
the aforementioned virtual Volvo Cars factory. In ad-
dition, in real life, designers have tolerances and error
margins built into their designs that need to be taken
into account when path-planning. Such concerns can
easily be managed by basing path-planning on com-
puting distances. On the other hand, by using distance
based path-planners we can also exploit these error
margins to speed up distance computations. If the de-
signer has an error of a couple of centimeters in their
models, then it is possible to speed up distance queries
because we know that millimeter accuracy is not nec-
essary. With this insight and new ways of using data
structures for distance queries, we are able to speed
up distance computations for massive point clouds by
almost two orders of magnitude. We also present two
theorems guaranteeing that our algorithm performs as
desired. To the best of the author’s knowledge, these
two theorems do not exist in the literature.
This paper is structured as follows: Section 2 will
describe how a simplified point cloud can be created
given a maximal allowed error in the computed short-
est distance. We also prove that the proposed sim-
plification methods produce an error in the distance
queries that can be controlled by the level of simpli-
fication. Section 3 explains how the simplified point
cloud can be divided into subsets to expedite distance
computations. Section 4 explains how to compute the
shortest distance between the simplified point cloud
subsets and the path-planning object based on these
subsets. Section 5 evaluates the algorithms by consid-
ering a real-world point cloud and triangulated geom-
etry. In the final section we conclude. The results in
this paper are based on the work in (Eriksson, 2014).
2 SIMPLIFICATION OF THE
POINT CLOUD
In order to be able to work more efficiently with a
massive point cloud, it would be beneficial to create
a simplification of the point cloud with fewer points.
The fewer points such a representation has, the faster
the distance computations will be. Hence, we look for
an appropriate trade-off between a slightly incorrect
but much faster distance computation.
2.1 Notation
To prepare for later results, some notation is neces-
sary. The point cloud will always be denoted by P
and its corresponding cardinality (number of points)
by |P|, which will be assumed to be finite. The point
cloud consists of a set of points in R
n
and this paper
will focus on n = 2 or n = 3 unless stated otherwise.
Denote by p
i
, i = 1, 2, . . . , n, the coordinates of a point
p ∈ R
n
and let p
1
, p
2
, . . . , p
m
denote m points where
p
i
∈ R
n
. When a subset of P is considered it will be
denoted by Q, i.e. Q ⊆ P. Multiple disjoint subsets
of P will be denoted by Q
i
and when no particular
subset is of interest the index will be dropped. The
object that will be moved through the point cloud will
be denoted by S, and it will be a compact subset of
R
n
.
We now give a central definition that plays an im-
portant role in the rest of the paper, that of the distance
between objects.
Definition 1. Let Q, R ⊂ R
n
and for q ∈ R
n
let kqk
stand for the Euclidean norm. Define:
d(q, r) = kq−rk,
d(q, R) = inf
r∈R
d(q, r),
d(Q, R) = inf
q∈Q
r∈R
d(q, r),
d
H
(Q, R) = max
(
sup
q∈Q
inf
r∈R
d(q, r), sup
r∈R
inf
q∈Q
d(q, r)
)
,
whereby the final distance definition is the well-
known Hausdorff metric. The next definition defines
what is meant by a simplification of a point cloud.
Definition 2. For ε ∈R
>0
a point cloud P
ε
is referred
to as an ε-simplification of P if it satisfies:
1. |P
ε
| ≤ |P|
2. d
H
(P, P
ε
) ≤ ε .
The first condition means that an ε-simplification
can never have more points than the original point
cloud. The second condition means that for all points
in the original point cloud P, there should be a point
in the ε-simplification near it and also that we do not
create new points in the ε-simplification of P that are
far away from points in the original cloud P. Both
these conditions seem very natural. In Section 2.4 we
will show that the second requirement implies the de-
sirable condition that
|d(P, R) −d(P
ε
, R)| ≤ ε, ∀R ⊆ R
n
. (1)
ApproximateDistanceQueriesforPath-planninginMassivePointClouds
21

We now present two simplification methods that ful-
fill Definition 2. Note also that one could attempt a
simpler down-sampling, however, for our applications
we need to guarantee that the down-sampling satisfies
Equation 1 and it is not so obvious how to produce an
efficient down-sampling that fulfills this requirement.
2.2 The Grid-based Partitioning
The first ε-simplification scheme presented here is
based on partitioning the point cloud by small axis-
aligned grid boxes with diagonal 2ε, with ε ∈ R
>0
.
When simplifying the point cloud, two points that are
closer than 2ε may be represented by the midpoint of
the line connecting them in P
ε
without violating Equa-
tion 2 in Definition 2. The grid-based partitioning uti-
lizes this fact by partitioning the original bounding
box of the point cloud into disjoint axis-aligned grid
boxes with side length
2
√
n
ε so that the diagonal of
each grid box is 2ε. All points that fall into the same
axis-aligned grid box may be represented by the box’s
midpoint in P
ε
. In order to allow for this partitioning,
the original bounding box of P can easily be extended
to make all side lengths divisible by
2
√
n
ε. Extending
the bounding box will still guarantee that it contains
P.
The simplification scheme is illustrated in Figure
1 where the original point cloud in 2D can be seen
to the left and the resulting simplified point cloud
obtained from using the grid-based partitioning ε-
simplification can be seen to the right.
Figure 1: (Left) Original 2D point cloud. (Right) ε-
simplification of the point cloud after using the grid-based
partitioning.
Note that it is possible that |P
ε
| = |P| if only one
point falls within each axis-aligned grid box, which
could happen if the point cloud is sparse or if ε is
very small. In addition, it is obvious that such a
simplification method fulfills our definition of an ε-
simplification.
2.3 The k-means Method
The grid-based partitioning described in the previ-
ous section has the advantage of having linear time-
complexity in the size of the point cloud, but it may
give a non-optimal partitioning for at least two rea-
sons:
1. A box of diagonal 2ε can be contained in a sphere
with radius ε.
2. The position of the axis-aligned grid boxes is cho-
sen based only on the bounding box of P and no
other properties of the point cloud
The first point addresses the fact that an axis-aligned
grid box of diagonal 2ε is not the object of maximal
volume that can be used to simplify a set of points.
In fact, Equation 2 of Definition 2 will also hold in
the case when all points falling within a sphere with
radius ε are represented by the center of the sphere.
The location of the spheres will depend on the distri-
bution of the point cloud since the original bounding
box cannot be partitioned into disjoint spheres.
This also addresses the second problem of the
grid-based partitioning, which concerns the fact that
the axis-aligned grid boxes placement only depends
on the bounding box of P and not on the structure of
the point cloud. Taking the distribution of points into
account is expected to make it possible to create an
ε-simplification with a smaller |P
ε
|.
One way of placing the spheres adaptively is to
use k-means clustering. The k-means method is one
of the oldest clustering methods whose aim is to di-
vide a set of points into k clusters. The algorithm
is based on work by Lloyd, (Lloyd, 1982), and is
often referred to as Lloyd’s algorithm. The clusters
C
1
, . . . ,C
k
have the properties C
i
⊆ Q, C
i
∩C
j
=
/
0 for
i 6= j, and
S
k
i=1
C
i
= Q. Each cluster has a centroid µ
i
which is computed as the the mean value of all points
belonging to cluster C
i
. A point is assigned to the
cluster with the centroid closest to the point. The k-
means method for a set of points Q can be written as
the optimization problem:
minimize
C
1
,...,C
k
k
∑
j=1
∑
i∈C
j
kq
i
−µ
j
k
2
, ∀q
i
∈ Q. (2)
The k-means method can be used to divide the
point cloud recursively. For each new subset it has
to be investigated whether the radius of the smallest
enclosing sphere has a radius that is no more than ε.
If the radius is larger than ε, the k-means method can
be used to create new clusters until each cluster can
be represented by the center of a sphere with radius
of at most ε. An optimal k-means method is expected
to produce a better clustering than the grid-based par-
titioning as is illustrated in Figure 2.
As with the grid-based simplification it is possible
that |P
ε
| = |P| if ε is small in comparison to the distri-
bution of points. Otherwise it is obvious that such a
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
22

simplification method also fulfills our definition of an
ε-simplification.
Figure 2: Grid based method compared to the k-means
method in 2D, illustrating that the k-means method may be
able to create a simplified point cloud with fewer points.
2.4 Maximum Error In the Computed
Shortest Distance
This section will show that Condition 2 of Definition
2 implies Equation 1. This is trivial if P consists of
only one point and follows directly from the trian-
gle inequality, see Figure 3. The following theorem
shows that the error in the shortest distance is always
bounded by ε for an ε-simplification scheme satisfy-
ing Definition 2.
Theorem 1. Let P be a point cloud and let P
ε
be an
ε-simplification of P and let R ⊆ R
n
. Then it follows
that
|d(P, R) −d(P
ε
, R)| ≤ ε (3)
Proof. Let p = argmin
y∈P
d(y, R) and let p
ε
∈ P
ε
be
such that d(p, p
ε
) ≤ ε. It follows that
d(p
ε
, R) ≤ d(p, p
ε
) + d(p, R) ≤ ε+ d(p, R). (4)
Let q
ε
= argmin
y∈P
ε
d(y, R). Then,
d(q
ε
, R) ≤ d(p
ε
, R) ≤ ε+ d(p, R). (5)
In addition, there exists a point q ∈ P such that
d(q, q
ε
) ≤ ε. Hence,
d(q, R) ≤ d(q, q
ε
) + d(q
ε
, R) ≤ ε + d(q
ε
, R) (6)
and as before we have
d(p, R) ≤d(q, R) ≤ ε+ d(q
ε
, R). (7)
Hence from Equations 5 and 7 it follows that,
|d(P, R) −d(P
ε
, R)| ≤ ε. (8)
Figure 3: Illustration of the maximal error in Theorem 1 in
the case of simplifying with grid boxes with diagonal 2ε.
3 ORGANIZING THE POINT
CLOUD FOR FAST DISTANCE
QUERIES
This section explains how the original bounding box
of the point cloud will be successively divided and
organized into new disjoint sub-boxes in order to ob-
tain a partitioning of the original point cloud for fast
out-of-core distance queries. These subsets of points
make it possible to carry out distance queries for large
point clouds given only a small amount of main mem-
ory.
Given the original point cloud, it is straightfor-
ward to find the bounding box of P. Suppose that we
want to divide the point cloud into subsets of at most
T points and that |P| > T. By splitting the original
bounding box along one of the coordinate directions
two new sub-boxes can be created. The sub-boxes
are divided into two new sub-boxes recursively until
all subsets contain no more than T points. Note that
there are several options for dividing the sub-boxes,
such as along the longest side or the coordinate direc-
tion with the largest variance. Each method of subdi-
vision affects the quality of the data structures that are
based on these sub-boxes and we chose to split in the
coordinate direction with the largest variance. Split-
ting in this direction seemed to produce good results
although more thorough tests are required to investi-
gate the relationship between splitting choice and per-
formance results.
We choose the value of T so that numerous sub-
ApproximateDistanceQueriesforPath-planninginMassivePointClouds
23

sets of points can fit in main memory but also so that
each subset has a large number of points so we mini-
mize the number of reads from hard disk. At the same
time, by choosing T so that we have numerous sub-
sets, we can then exploit this by carrying out the dis-
tance queries to each of these subsets in parallel. We
explore the effects of different values of T in Section
5. The choice of T obviously depends significantly on
the disk transfer rate (SSD vs HDD) and our choices
are optimized for our chosen hardware.
4 DISTANCE COMPUTATION
This section describes how the distance from a sub-
set to the object can be computed quickly in-core. It
introduces the Proximity Query Package (PQP) and
also derives a necessary condition in order to deter-
mine when a subset can contain the point closest to
the object in the point cloud considered.
4.1 Proximity Query Package
A fast way to find the shortest distance between a
point cloud and a triangulated or point-based object
is needed in order to be able to compute distances
to the subsets that may contain the closest point. In
order to do so we chose to use PQP which was de-
signed for collision detection, distance computation,
and tolerance verification between pairs of geomet-
ric models, (Larsen et al., 1999). It has been shown
to be the best choice of bounding volume hierarchy
for distance queries when fast queries are the goal,
(Larsen et al., 1999), (Lauterbach et al., 2010). PQP
uses swept sphere volumes to create a bounding vol-
ume hierarchy that can be used to efficiently compute
the shortest distance by traversing the tree of bound-
ing volumes.
The memory requirement to build a single PQP
model is significant since building a PQP model with
1 billion points uses about 36GB of RAM. This mem-
ory limitation is not a problem for the proposed ap-
proach due to our memory-based management of the
PQP models, which will store numerous small PQP
models out of core. Hence each subset of points will
have one PQP model, so if T is chosen small enough
each individual PQP model can be built without using
much memory and can easily be stored out-of-core
and read into main memory quickly as disk transfer
time is often the bottleneck (see (Eriksson, 2014) for
more results).
4.2 STXXL
The Standard Template Library for Extra Large Data
Sets (STXXL) is an implementation of the C++ stan-
dard template library for external memory (out-of-
core) computations. The point cloud will be stored
in an STXXL vector (Dementiev et al., 2008) during
the simplification phase. However, using STXXL im-
poses some limitations on users such as only being
able to hold so-called plain old data structures (ints,
floats, doubles, etc.) as elements in a STXXL vec-
tor, (Dementiev et al., 2008). It is also not allowed to
use references or pointers to elements in an STXXL
vector since elements are temporarily read into mem-
ory when requested, so that references will get invali-
dated when elements are evicted from memory. These
limitations makes the construction of a single out-of-
core PQP model with STXXL problematic. In addi-
tion, the implementation of an out-of-core PQP data
structure is not desirable because the changes would
require abandoning the advantageous C++ program-
ming paradigm to implement all data structures as
plain old data structures. Another reason is that RAM
accesses are about one order of magnitude faster than
memory accesses using STXXL when data has to be
read from the disk.
In order to avoid considering all subsets for each
distance query, Theorem 2 in the next section will pro-
vide a necessary condition for a subset to contain the
point closest to the object. The PQP models that are
closest will be kept in-core and PQP models that are
far away will remain on the hard disk, in cases where
all PQP models may not fit in-core. This situation can
change when the object moves, in which case some
PQP models will have to be loaded while others will
have to be removed from main memory in case all of
the PQP models cannot fit at once.
To achieve this, PQP was modified to allow writ-
ing of the interior data structure in a binary format to
the hard disk. Note that it is difficult to apply such
a method to a single large PQP model and use it to
only read in parts of the hierarchy on an as needed
basis. This is because when querying a bounding vol-
ume hierarchy it is unknown which parts of the hi-
erarchy will be required and accesses can be largely
random. In the current case, with smaller individual
models and the coming Theorem 2, we are able to
avoid this problem. Because of this, it was decided
to write each PQP model to the hard drive by using a
binary format and then reload them when needed.
An advantage with this modification is that the
distance computation can be carried out in parallel,
which would not have been the case if an STXXL vec-
tor of it had been used to hold the PQP models. An-
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
24

other advantage with not using STXXL is that when
a PQP model has to be read, PQP models that are far
away from S can be removed since they are not ex-
pected to be used again. In the case of using STXXL
it is not clear what will be removed in order to free up
the space for the reading.
4.3 A Fast Exclusion Theorem
In this section a very simple criterion is constructed
to make it possible to exclude a majority of the point
subsets without computing any distances when it is
clear that they are too far away from the object S
to contain the closest point. First we describe what
is meant by a motion of the object that we wish to
move through the point cloud. The object S will
be moved via rigid body motions M(t), i.e. transla-
tions and rotations. A configuration of S is denoted
by S(t) := M(t)S, which is the position of S at time
t. Assume that the shortest distance is computed at
times t
i
where t
0
= 0 and S = S(t
0
). If p ∈ S is a
point that originally belongs to S, then we denote
this point at time t after rotations and translations by
p(t) := M(t)p. Note that p never moves with respect
to S. Some definitions are necessary before stating the
fast exclusion theorem:
Definition 3. Define by α
i
an upper bound on the
largest displacement of S between t
i−1
and t
i
, that is
α
i
= max
p∈S
kp(t
i
) −p(t
i−1
))k. (9)
Definition 4. Define d
min
(t) to be the shortest dis-
tance from the object S(t) to the point cloud P at time
t.
The idea is that α
i
can be used to bound how much
closer a subset can be to the object compared to the
previous iteration. The result is stated in the following
Theorem:
Theorem 2. Let P be a point cloud and divide P
into m disjoint subsets. Let i ≥ 1, j ∈ {1, . . . , m} and
d
j
(t
i−1
) be a lower bound on the distance from subset
j to S(t
i−1
). Then no point in subset j can be closer
to S(t
i
) than
max(0, d
j
(t
i−1
) −α
i
) (10)
and also
d(P, S) ≤ d
min
(t
i−1
) + α
i
. (11)
Proof. The first statement follows from the fact that
the object has moved at most α
i
and that no point
in point subset j was closer than d
j
(t
i−1
) before S
moved, which yields that no points in the subset can
be closer than max(0, d
j
(t
i−1
) −α
i
). Since the object
has moved at most α
i
, the point that was previously
at a distance d
min
(t
i−1
) away cannot be further away
than d
min
(t
i−1
) + α
i
. This implies the second state-
ment.
The theorem makes it possible to neglect a large
amount of the subsets that are known to be too far
away to contain the point closest to the object. The
idea is to compute the initial values d
j
(0) before the
object starts moving. Similarly, an upper bound on
d
min
(0) can be computed by considering only a few
points per subset and save the shortest distance found.
The use of the theorem is illustrated in Algorithm 1.
Algorithm 1: Computation of the shortest distance using
Theorem 2.
for subset number j do
Compute an initial lower bound of d
j
(0)
end for
Find an upper bound for d
min
(0)
i ←1
while Object is moving do
Move S to the next position and compute α
i
d
min
(t
i
) ← d
min
(t
i−1
) + α
i
for each subset number j do
d
j
(t
i
) ← d
j
(t
i−1
) −α
i
if d
j
(t
i
) ≤ d
min
(t
i
) then
Compute d
j
(t
i
) using the PQP model
Set d
min
(t
i
) = min(d
j
(t
i
), d
min
(t
i
))
end if
end for
i ← i+ 1
end while
This inequality based on α
i
is designed for quick
evaluation, however it should be mentioned that it can
be very weak in the sense that it does not take the
direction of movement into account. If the object is
moved away from a subset so that the distance from
the points in subset j to the object increases, the lower
bound will be pessimistic since α
i
will be subtracted
from d
j
(t
i−1
) .
5 SIMULATION RESULTS
The point cloud that will be considered is a part of
a factory and consists of about 1 billion points. In
this section of the factory a car chassis is required to
move from a start to an end configuration. In addi-
tion, it is often required that the car be at least a given
distance from the surrounding point cloud along the
whole path. A picture of the point cloud can be seen
in Figure 4. The object will be moved from the hub
in the upper right corner to the hub in the lower left
ApproximateDistanceQueriesforPath-planninginMassivePointClouds
25
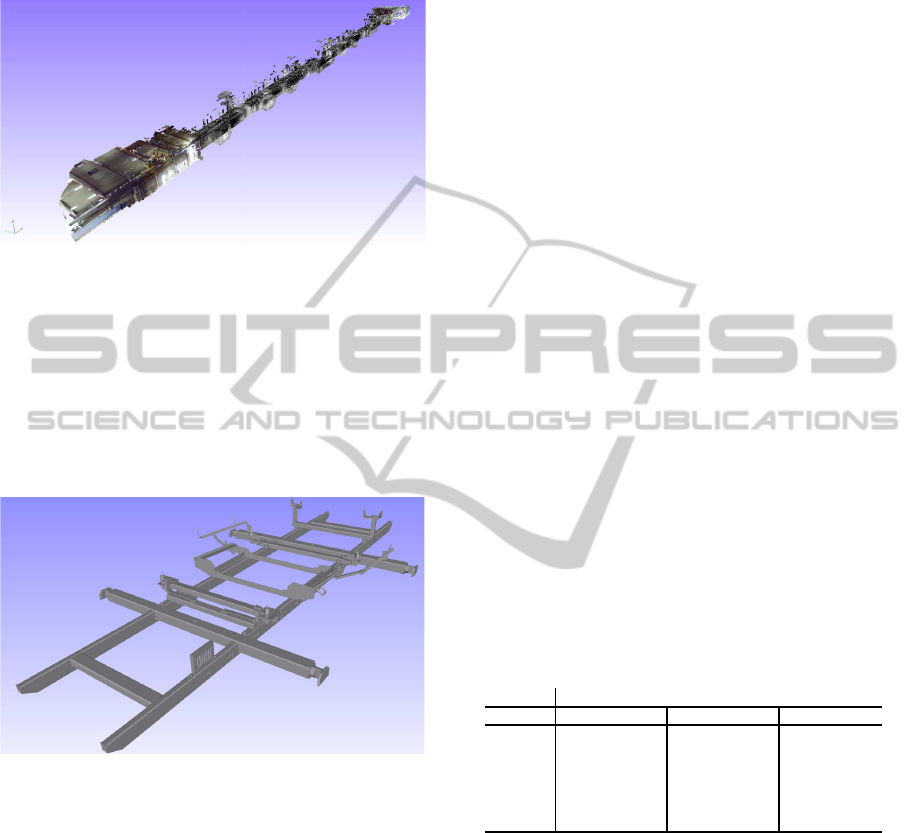
corner of Figure 4 along a known path. There are a
total of 700 discrete time steps. The spacing between
points in the point cloud is about 0.5 centimeters.
Figure 4: An overview of the original point cloud consisting
of about 1 billion points.
The object that is moved through the point cloud
is a holding mechanism for a car and its triangulation
consists of 78,403 triangles and can be seen in Figure
5. The position of the object along the path is given
at discrete points in time and the displacements of the
object vary in size. The variation in the displacements
will directly affect the computed values of α
i
.
Figure 5: A visualization of the object, a car holding mech-
anism, that will be moved through the point cloud.
To compute α
i
we computedthe originalbounding
box of the object S and transformed its eight corners at
each iteration and then computed the furthest a corner
point had moved and set that equal to α
i
. In the case
of no rotations of the object this upper bound is in fact
exact.
The computer used for the simulations was an In-
tel Core i7 processor, 32 GB RAM, and a 250 GB
SSD. The amount of RAM was constrained to 8 GB
in order to force the algorithms to run out-of-core for
the original point cloud with 1 billion points. In the
first step we built PQP models for both the triangu-
lated object S and the point cloud considered. If all
points are stored as triplets of floats, the total memory
requirement for all the point cloud PQP models equals
36 GB, so that only at most 22% of the PQP models
can reside in memory at the same time. The short-
est distances were computed for different values of
T (where T was defined in Section 3) and the fastest
time was obtained for T = 1, 000, 000 for which the
distance computations took a total of 500s, which cor-
responds to 1.4s per distance computation (see (Eriks-
son, 2014) for results on other values of T). Theorem
2 managed to rule out, on average, 96% of the sub-
sets for each distance computation which gave a sig-
nificant speed-up compared to if all subsets had been
considered.
This is too slow for many path-planning applica-
tions (especially ones that are required to run in real
time) so a simplified point cloud was created instead
in order to speed up the distance computations. In or-
der to compare the two ε-simplification methods from
Section 2 the original point cloud was simplified for
different values of ε and the results can be seen in Ta-
ble 1.
It is clear that the larger ε is, the smaller the num-
ber of points in the simplified point cloud is. It can
also be seen that the k-means method outperforms the
grid-based partitioning in the sense that it is able to
create an ε-simplification with fewer points. On the
other hand, it should be mentioned that the k-means
method is significantly slower than using the grid-
based partitioning, so there is a trade off between ob-
taining a small value of |P
ε
| and the execution time of
the simplification phase.
Table 1: Number of points (millions) and percentage of
points remaining for each simplification method.
ε
k-means, k = 2 k-means, k = 3 Grid boxes
(meters) Points % Points % Points %
0.005 813.6 79.4 874.6 85.4 965.4 94.3
0.01
467.2 45.6 556.5 54.3 826.4 80.6
0.02
205.1 20.0 241.0 23.5 378.6 37.0
0.03
111.2 10.8 129.8 12.7 181.2 17.7
0.05
47.5 4.6 55.6 5.4 69.9 6.8
0.1
13.4 1.3 16.2 1.6 18.9 1.8
When simplifying the point cloud we chose ε = 2
centimeters to correspond to a realistic tolerance for
the path-planningapplicationswhere these techniques
will be used. With ε = 2 cm, the k-means method
yielded a simplified point cloud with 200 million
points, so that the memory required for the PQP mod-
els was about 7.2 GB and will therefore fit in-core
with the memory restriction of 8 GB. When compar-
ing the time taken for each method, the k-means sim-
plification method is around two orders of magnitude
slower than the much simpler grid box method. More
results can be found in (Eriksson, 2014). The dis-
tances were computed in-core to the simplified point
cloud and for T = 1, 000, 000 the total execution time
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
26

was 22.1 seconds, which means that each distance
computation took on average 0.03s which is a signif-
icant speed-up compared to the original point cloud
and would allow for real-time computation of dis-
tances (i.e. for frame rates of 20 - 30 frames per sec-
ond). A comparison between the time for each dis-
tance computation for the original and the simplified
point clouds can be seen in Figure 6. As can be seen
in the figure, the new distance computations are or-
ders of magnitude faster in the simplified point cloud
than in the original point cloud.
0 100 200 300 400 500 600 700
0
0.5
1
1.5
2
2.5
3
Distance computation
Time to compute distance (s)
1 billion points
200 million points
Figure 6: Time for distance computations for the original
and the simplified point clouds.
6 CONCLUSIONS
It has been verified that an in-core PQP implementa-
tion can be used even for massive point clouds by di-
viding the point cloud into subsets and then use The-
orem 2 in order to rule out many of the subsets. The-
orem 2 was able to rule out 96% of the subsets so
that only a few subsets had to be considered for each
distance computation. Theorem 2 has a drawback of
not being precise in some cases and therefore forc-
ing reads of subsets that are far away from the object.
This could be avoided by using a fast distance approx-
imation scheme based on the bounding boxes of the
subsets or the extreme points of the convex hulls in
order to approximate how close subsets actually are
before considering all the points. This is appealing
since reading the subset from the hard-disk is the ma-
jor bottleneck in the proposed approach which is why
it is of interest to use a few points to approximate the
distance to the rest of the points.
By simplifying the point cloud using either the
grid-based partitioning or the k-means clustering
method, a simplified point cloud was created that was
easier to work with. It was seen in Section 5 that
a point cloud with 1 billion points could be simpli-
fied, with ε = 2 cm, to a point cloud with 200 million
points to which the distances could be computed in-
core given 8 GB of memory and therefore decrease
the computation time from 500s to 22s. By allow-
ing the computed shortest distance to deviate by ε, it
is therefore possible to decrease the time for distance
computations significantly. It was also seen that the k-
means method provides a simplified point cloud with
a smaller |P
ε
| than the grid-based partitioning, even
though it is significantly slower.
Because methods used to carry out collision de-
tection with massive models are inappropriate for dis-
tance queries, (Yoon et al., 2004), this work fills a
gap in the literature for distance computations in mas-
sive point clouds. Although methods exist for colli-
sion detection in point clouds, (Pan et al., 2011), their
extension to massive point clouds is not clear. In ad-
dition, given the minimum distance restrictions often
required during path planning, using collision detec-
tion does not seem to be natural. Hence, we have
shown that the path-planning problem requiring min-
imum distances can be solved directly via distance
computations.
Although the method has been shown to be fast,
distance computations are in general slower than
identical collision queries. Hence, if the user’s goal
is simply the fastest computations possible and he or
she does not require the extra distance information,
then it might be beneficial to use a collision based ap-
proach.
In future work we would like to address the fol-
lowing promising avenues for research:
• Use the extreme points of the convex hull of each
subset in order to approximate the distance to the
object when Theorem 2 fails to rule out a subset.
• Take the direction of motion of S into account in
Theorem 2.
• Use bounding boxes instead of swept sphere vol-
umes in PQP in order to decrease the memory re-
quirement for a PQP model.
• Investigate how to choose T optimally as a func-
tion of amount of RAM, |P| and the properties of
the disk(s) used.
ACKNOWLEDGEMENTS
This work was carried out at the Wingquist Labora-
tory VINN Excellence Centre, and is part of the Sus-
tainable Production Initiativeand the Production Area
of Advance at Chalmers University of Technology. It
was supported by the Swedish Governmental Agency
for Innovation Systems.
ApproximateDistanceQueriesforPath-planninginMassivePointClouds
27

REFERENCES
Berlin, R. (2002). Accurate robot and workcell simulation
based on 3d laser scanning. In Proceedings of the 33rd
ISR (International Symposium on Robotics).
Bialkowski, J., Karaman, S., Otte, M., and Frazzoli, E.
(2013). Efficient collision checking in sampling-
based motion planning. In Algorithmic Foundations
of Robotics X, pages 365–380. Springer.
Carlson, J. S., Spensieri, D., S¨oderberg, R., Bohlin, R., and
Lindkvist, L. (2013). Non-nominal path planning for
robust robotic assembly. Journal of manufacturing
systems, 32(3):429–435.
Dementiev, R., Kettner, L., and Sanders, P. (2008). Stxxl:
standard template library for xxl data sets. Software:
Practice and Experience, 38(6):589–637.
Dupuis, E., Rekleitis, I., Bedwani, J.-L., Lamarche, T., Al-
lard, P., and Zhu, W.-H. (2008). Over-the-horizon
autonomous rover navigation: experimental results.
In International Symposium on Artificial Intelligence,
Robotics and Automation in Space (i-SAIRAS), Los
Angeles, CA.
Eriksson, D. (2014). Point cloud simplification and pro-
cessing for path-planning. Master’s thesis, Chalmers
University of Technology.
Fr¨ohlich, C. and Mettenleiter, M. (2004). Terrestrial laser
scanning—new perspectives in 3d surveying. Interna-
tional Archives of Photogrammetry, Remote Sensing
and Spatial Information Sciences, 36(Part 8):W2.
Hermansson, T., Bohlin, R., Carlson, J. S., and S¨oderberg,
R. (2012). Automatic path planning for wiring harness
installations (wt). In 4th CIRP Conference on Assem-
bly Technology and Systems-CATS 2012, University of
Michigan, Ann Arbor, USA on May 21-23, 2012.
Landa, Y. (2008). Visibility of point clouds and exploratory
path planning in unknown environments. ProQuest.
Landa, Y., Galkowski, D., Huang, Y. R., Joshi, A., Lee,
C., Leung, K. K., Malla, G., Treanor, J., Voroninski,
V., Bertozzi, A. L., et al. (2007). Robotic path plan-
ning and visibility with limited sensor data. In Ameri-
can Control Conference, 2007. ACC’07, pages 5425–
5430. IEEE.
Larsen, E., Gottschalk, S., Lin, M. C., and Manocha, D.
(1999). Fast proximity queries with swept sphere vol-
umes. Technical report, Technical Report TR99-018,
Department of Computer Science, University of North
Carolina.
Latombe, J.-C. (1990). ROBOT MOTION PLANNING.:
Edition en anglais. Springer.
Lauterbach, C., Mo, Q., and Manocha, D. (2010). gprox-
imity: Hierarchical gpu-based operations for collision
and distance queries. In Computer Graphics Forum,
volume 29, pages 419–428. Wiley Online Library.
LaValle, S. M. (2006). Planning algorithms. Cambridge
university press.
Lloyd, S. (1982). Least squares quantization in pcm. In-
formation Theory, IEEE Transactions on, 28(2):129–
137.
Pan, J., Chitta, S., and Manocha, D. (2011). Probabilistic
collision detection between noisy point clouds using
robust classification. In International Symposium on
Robotics Research.
Pauly, M., Gross, M., and Kobbelt, L. P. (2002). Efficient
simplification of point-sampled surfaces. In Visualiza-
tion, 2002. VIS 2002. IEEE, pages 163–170. IEEE.
Sankaranarayanan, J., Samet, H., and Varshney, A. (2007).
A fast all nearest neighbor algorithm for applications
involving large point-clouds. Computers & Graphics,
31(2):157–174.
Spensieri, D., Bohlin, R., and Carlson, J. S. (2013). Coordi-
nation of robot paths for cycle time minimization. In
CASE, pages 522–527.
Spensieri, D., Carlson, J. S., Bohlin, R., and S¨oderberg, R.
(2008). Integrating assembly design, sequence opti-
mization, and advanced path planning. ASME Confer-
ence Proceedings, (43253):73–81.
Sucan, I. A., Kalakrishnan, M., and Chitta, S. (2010).
Combining planning techniques for manipulation us-
ing realtime perception. In Robotics and Automa-
tion (ICRA), 2010 IEEE International Conference on,
pages 2895–2901. IEEE.
Tafuri, S., Shellshear, E., Bohlin, R., and Carlson, J. S.
(2012). Automatic collision free path planning in hy-
brid triangle and point models: a case study. In Pro-
ceedings of the Winter Simulation Conference, page
282. Winter Simulation Conference.
Volvo (2013). Volvo Cars in Gothenburg, Personal commu-
nication.
Yoon, S.-E., Salomon, B., Lin, M., and Manocha, D. (2004).
Fast collision detection between massive models us-
ing dynamic simplification. In Proceedings of the
2004 Eurographics/ACM SIGGRAPH symposium on
Geometry processing, pages 136–146. ACM.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
28
