
Describing Functionalities and Reactions of Cars and Managing
Their Feature Interactions
Ahmed Khoumsi
1
and Zohair Chentouf
2
1
Department of Electrical & Computer Engineering, University of Sherbrooke, Sherbrooke, Canada
2
Department of Computer Science, King Saud University, Riyadh, Saudi Arabia
Keywords: Automotive Reaction System (ARS), Car State and Functionality Descriptions, Car Reaction Description,
Conflicting Actions and Rules, Feature Interaction (FI) Detection and Resolution.
Abstract: We develop an Automotive Reaction System (ARS) framework to support cars by capabilities to react to
various situations. With ARS, the states and actions of a car are designed as objects of a high level object-
oriented language, called ARS-language. ARS permits also to design the reactions of a car to various
situations by an ARS-specification consisting of rules “conditionaction”. The ARS-objects and ARS-
specification are implemented in a car to provide her with capabilities to function and react online. ARS
permits also to model certain actions of a car at a high abstraction level by an ARS-model consisting of
rules “condition→operation”. With ARS, we are confronted to conflicts (or feature interactions) which
denote situations where an ARS-specification implies simultaneous executions of incompatible actions. We
propose an approach to detect and resolve feature interactions.
1 INTRODUCTION
We develop an Automotive Reaction System (ARS)
to support cars by capabilities to react in various
situations. We first develop a high level object-
oriented language, called ARS-language, which is
used to design the states and functionalities (or
actions) of a car by objects. Then, we propose a
formalism to design the car reactions by an ARS-
specification consisting of rules “condition
action”. The ARS-objects and ARS-specification
must be implemented in a car to provide her with
capabilities to function and react online.
With ARS, we are confronted to feature
interactions (FI), where an ARS-specification
implies executions of incompatible actions.
FIs have been studied in telecommunications
since the 80s, for example in the workshops (Bouma
and Velthuijsen, 1994; Cheng and Ohta, 1995; Dini
et al., 1997; Kimbler and Bouma, 1998; Calder and
Magill, 2000; Amyot and Logrippo, 2003; Reiff-
Marganiec and Ryan, 2005; du Bousquet and
Richier, 2007; Nakamura and Reiff-Marganiec,
2009), where the term feature may denote not only a
basic service (or action), but also a complex service
which combines several simpler services.
For FI detection purpose, we model certain
actions at a high abstraction level by so-called ARS-
models consisting of rules “condition → operation”.
The proposed FI detection procedure is based on
combining adequately ARS models.
Here is the structure of the article: We first
present the three parts of ARS: the states and actions
of the car are designed as objects (Sect. 2), its
reactions are designed as rules “conditionaction”
(Sect. 3), and some actions are modeled as rules
“condition→operation” (Sect. 4). Then, we study
how an ARS-specification is translated into
executions of actions, while detecting (Sect. 5) and
resolving (Sect. 6) FIs. Sect. 7 is related to the
validation of our work. Sect. 8 presents related work
and highlights the relevance of using ARS. We
conclude in Sect. 9.
2 DESIGNING STATES AND
FUNCTIONALITIES OF A CAR
In the first part of ARS, a car is designed as an
object of a class car with attributes and methods.
The attributes specify the current state of the car,
while the methods specify actions of the car. Due to
space limit, we present a small portion of the class
147
Khoumsi A. and Chentouf Z..
Describing Functionalities and Reactions of Cars and Managing Their Feature Interactions.
DOI: 10.5220/0005010501470155
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 147-155
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

car, but which is sufficient to give a good idea of
how to model the states and actions of a car.
2.1 Portion of the Class Car
A portion of the class car is outlined below. To
distinguish types and classes from attributes and
objects, the latter are in italic while the former are in
bold. The class car uses methods and two categories
of attributes: basic and complex attributes.
Class car
// basic attributes of the class car
double time, maxSpeed, minSpeed
boolean downtown, dark, headlights
// complex attributes of the class car
position Position
speed Speed
school School //attribute describing school
neighborhood
stop Stop //attribute describing approached stops
obstacle Robs, Lobs, FLobs, FRobs //attrib. desc. obst.
// methods of the class car
void decel(), accel(), stop(), park(),
uTurn(), honk(), set(any, any)
not(any()), yes(any()), prepare(any())
boolean neighborhood(localizable), approach(localizable)
reach(localizable), close(moving)
void avoid(obstacle)
2.2 Basic Attributes in Car
Basic attributes have a basic type like double or
boolean, they are named in italic with the first letter
non-capitalized, while their types are named in bold.
The basic attributes given in the class car are: time,
the current time; maxSpeed, minSpeed, the current
max and min speed limits; downtown, it is true if the
car is in downtown; dark, it is true in darkness;
headlights, it is true if the headlights are on.
2.3 Complex Attributes in Car
a) Attributes: Position, Speed
Position: it is an object of a class position; it
specifies a circle that approximates a zone occupied
by the car. For example, the object Position has 3
basic attributes: longitude and latitude for the center
of the circle, and size for the radius of the circle.
Speed : it is an object of a class speed; it
specifies the linear speed vector of the car. For
example, Speed has two basic attributes: module and
angle, for the module and the direction of the speed.
b) Class localizable is a class with the attribute
Position.
c) Attribute School: The class school inherits
from localizable, and hence a school object has an
attribute Position of the class position. The attribute
School is a school object which is automatically
created when the car enters a school neighborhood,
and automatically destroyed when the car leaves the
school neighborhood. When School exists, its
attribute Position specifies a circular school
neighborhood.
d) Attribute Stop: The class stop inherits
from localizable. By inheritance, a stop object is a
localizable object, which hence has an attribute
Position of the class position. The attribute Stop is a
stop object which is created when the car starts
approaching a stop sign whose neighborhood
contains the car position, and destroyed when the car
starts going away from the stop sign. When Stop
exists, its attribute Position specifies a circular stop
neighborhood centered in the stop location.
e) Class moving: it inherits from the class
localizable and has the attribute Speed. Hence,
moving has at least two attributes: Position and
Speed, and the class car could be designed as a class
inheriting from moving.
f) Attributes of obstacle: The class obstacle
inherits from moving. By inheritance, an obstacle
object is a moving object which hence has attributes
Position and Speed of the classes position and
speed, resp. An obstacle object specifies an obstacle
which is close to the car and possibly moving.
obstacle has an attribute side which specifies in
which side of the car the obstacle is located. Four
obstacle attributes are defined in car (the complete
version of car contains other obstacle attributes):
Robs, Lobs, FRobs, FLobs, that correspond to
obstacles respectively at the right, left, front-right
and front-left of the car. Consider for example
FRobs, which is created when the car detects a close
obstacle at her front-right, and destroyed when the
obstacle is no more detected. When FRobs exists, its
attribute FRobs.Position specifies a circular
approximation of the zone occupied by the obstacle,
FRobs.Speed indicates the speed of the obstacle, and
FRobs.side that it is a front right obstacle.
2.4 Methods of Car
In Sect. 2.1, we represented methods of car by their
signature (name, types of parameters, and type of
returned value). any means any type. Let us present
each method.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
148

a) Methods without Parameter, which
return no Value
decel(), accel(), stop(), park(), uTurn() and
honk(): they execute the actions of accelerating,
decelerating, stopping, parking, making a U-turn and
honking, respectively.
b) Setter Methods, which return no Value
set(x, a): it is used with two parameters x and a
of the same type (which can be any type). For
example, set(maxSpeed, 50) sets the attribute
maxSpeed to 50.
c) Methods whose Parameter is a Method
Consider the expression p(m()), where m() is a
method used as parameter of a method p(). This
expression represents an action related to the action
of m(). Below are methods we have defined in car.
not(m()):
it sets the execution of m() to a forbidden
state. For
example, after the execution of not(park()),
park() is not executed when it is invoked.
yes(m()): it cancels the effect of not(m()), hence
m() is forbidden between not(m()) and yes(m()).
prepare(m()): it executes some actions in
preparation to the execution of a method. For
example, prepare(stop()) means to execute action(s)
in prevision to the execution of stop() that is
anticipated; example of action: decel().
d) Getter Methods whose Parameter is a
Localizable Object
neighborhood(N): it indicates if the car is in the
neighborhood of a localizable object N. For
example, neighborhood(School) returns true when
the car is in a school neighborhood.
approach(A):it indicates if the car is approaching
a localizable object A. Example, approach(Stop)
returns true if the car is approaching a stop sign.
reach(A): it indicate if the car has reached a
localizable object A. For example, reach(Stop)
returns true if the car has reached a stop sign which
it was approaching.
e) Methods whose Parameter is a moving
Object
close(M): it indicates if the car is too close to a
moving object M. For example, close(Lobs) returns
true if there is a close obstacle at the left of the car.
avoid(O): it executes the procedure to avoid an
obstacle specified as O.
2.5 The Environment of the Car in the
Class Car
The class car has attributes which contain
information about entities in the environment (e.g.
darkness, speed limits) or about relationships
involving the car (e.g. schools, obstacles).
3 DESIGNING CAR REACTIONS
Sect. 2 showed how to describe the states and
functionalities of a car in her environment by using
objects. Let us present the 2
nd
part of ARS, called
ARS-specification, which consists of a set of rules in
the form “condition action” meaning that action
must be taken whenever condition is satisfied. The
conditions and actions of rules describing a car are
constructed from attributes and methods of the
objects describing the car and its environment of the
1
st
part. condition is a passive boolean expression,
where by passive we mean that the expression does
not modify any attribute. condition may be
expressed by using attributes, methods and common
mathematical operators (e.g., logical, arithmetical).
action is a method call m(x) where m is a method
and x consists of none, one or more arguments. m(x)
and m(y) are considered as two distinct actions when
x and y have not the same value. In the following
examples of rules, all attributes and methods belong
to an object Car of the class car. For conciseness,
we omit to precede them by “Car.”.
Example 3.1. “downtown set(maxSpeed, 50)”
and “downtown set(minSpeed, 30)”. The car speed
in downtown must be ≥30 and ≤50 km/h.
Example3.2. “neighborhood(School)
(time
[7;19]) set(maxSpeed, 30)” and
“neighborhood(School)
(time [7; 19])
set(minSpeed, 15)”. The car speed must be
≥15 and
≤30km/h in a school
neighborhood from 7am to 7pm
Example 3.3. “dark set(headlights, true)”.
The car must set on her lights when it is dark.
Example 3.4. “(Speed.module>maxSpeed)
decel()”. The car must decelerate when her speed is
> a max speed limit.
Example 3.5. (Speed.module<minSpeed)
accel()”. The car must accelerate when her speed is
< a min speed limit.
Example 3.6. “close(FRobs) avoid(FRobs)”.
The car must avoid a close obstacle in her front right
Example 3.7.
“approach(Stop)prepare(stop())”. The car must
prepare to stop when it is approaching a stop sign.
DescribingFunctionalitiesandReactionsofCarsandManagingTheirFeatureInteractions
149

Example 3.8. “approach(Stop) reached(Stop)
stop()”. The car must stop when it reaches a stop
sign it was approaching.
4 MODELING ACTIVE ACTIONS
Let us model each active action of an ARS-
specification at a high abstraction level by an ARS-
model which consists of one or several rules
“condition→operation”. The rules of the 2
nd
and 3
rd
parts of ARS are distinguished by a bold and a
thin → respectively. Let us define the rules of the 3
rd
part by stressing their differences with the rules of
the 2
nd
part:
2
nd
part: in a rule “condaction” of the ARS-
specification (Sect. 3), action is a method call. This
rule means that action should be executed whenever
cond (modeling a situation) evaluates to true.
3
rd
part: The ARS-model of each active action a
contains rules “cond→operation”, where operation
is a basic operation applied to some attribute. This
rule means that operation is executed when the
action a is applied under condition cond.
“true→operation” means that operation is executed
whenever the action a is applied.
The basic operations we have considered are:
Set(x, v) which sets an attribute x to a value v, Inc(x)
and Dec(x) which increases and decreases an
attribute x respectively. Let us propose some hints
which should help the designer in the development
of an ARS-model for each active action. The
principle of “cond → operation” is to model the
influence of an active action on an attribute x.
Therefore, the first step should be to determine for
each action a, the set Attributes(a) of attributes that
are modified by a. This first step can be realized by
modeling the first part of ARS (Sect. 2) by UML
diagrams from which the sets Attributes(a) can be
derived. Then, for each active action a and attribute
x in Attributes(a), the objective must be to construct
one or more rules “cond→oper” where oper is a
basic modification of x performed by a. The idea is
to construct rules modeling our comprehension of
how a can modify x. For brevity, we will say
operation instead of basic operation.
Example 4.1: accel() increases the attribute
Speed.module. Therefore,
the ARS-model of accel()
contains the rule
“true→Inc(Speed.module)“.
Example
4.2: Consider the attribute Speed.angle
and the method avoid(FRobs) which avoids by the
left a front right obstacle. Since the car avoids the
obstacle by turning anticlockwise (its angle
increases),
the ARS-model of avoid(FRobs) contains
the rule
“true→ Inc(Speed.angle)”. Assuming that
obstacle avoidance requires a speed in an interval [ν,
μ], the ARS-model of avoid(FRobs) contains also
the rules “Speed.module<ν→ Inc(Speed.module)“
and “Speed.module>μ→Dec(Speed.module)“.
Example 4.3: The method stop() sets the attribute
Speed.module to 0. Therefore, the ARS-model of
stop() contains the rule “true→Set(Speed.module,0)”
5 FI DETECTION
5.1 Definitions and Notations
Enabled/Disabled: rule is said enabled when its
condition evaluates to true. Otherwise, it is said
disabled. An action or operation is said enabled
(resp. disabled) when it is the action or operation of
an enabled (resp. disabled) rule.
(In)compatible: Two actions or operations are
said incompatible when they cannot be executed
simultaneously. Otherwise, they are compatible. For
example, accel() and decel() are incompatible. Two
rules are said (in)compatible when their actions or
operations are (in)compatible.
Conflicting: Two actions are said conflicting
when they are at the same time enabled and
incompatible.
ARSmodel(a) is the ARS-model of an active
action a.
priority(a) is a priority associated to an active
action a. It is necessary for FI resolution.
Enabled/disabled, (in)compatible and conflicting
characteristics can change with time passing.
5.2 Global ARS-procedure for
Detecting and Resolving FI and
Executing Actions
An ARS-specification specifies how a car must react
continuously by executing adequate actions. It is
hence necessary to develop a so called ARS-
procedure that realizes the specified reactions. What
makes this task difficult is the presence of
conflicting actions (or feature interactions, FI) which
must be handled by the ARS-procedure outlined
below. Its inputs are an ARS-specification, and an
ARS-model and a priority for each active action that
is used in the ARS-specification. The off-line part
executes (when the car is not in use) preliminary
steps for FI detection. The on-line part executes
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
150

(repetitively while the car in use) three tasks: 1) FI
detection that identifies pairs of conflicting actions;
2) FI resolution that elects which actions to execute
so that conflicts are avoided; 3) the elected actions
are applied. The FI detection is detailed in Sects. 5.4
(off-line) and 5.5 (online). The online FI resolution
is detailed in Sect. 6.
ARS-procedure
Inputs: - ARS-specification
- For each active action a :
ARSmodel(a), priority(a)
Off-line part: // executed when the car is not in use
| Off-line part of FI detection // sect. 5.4
On-line part: //executed repetitively while the car is in
use
| On-line part of FI detection // sect. 5.5
| On-line FI resolution // sect. 6
| Apply the elected actions
5.3 Incompatible Operations,
Conflicting Actions
The objective of FI detection is to identify
conflicting actions, i.e. actions which are enabled (in
a rule ) and incompatible. We have investigated
many incompatible situations of cars and we have
found that they all occur when several actions
modify the same attribute in a contradictory way.
Therefore, we consider that two actions are
incompatible when and only when they modify the
same attribute in a contradictory way. To
characterize formally conflicting actions, we first
need to characterize incompatible operations. Recall
the three basic operations on an attribute x: Set(x, v),
Inc(x) and Dec(x). Two operations op
1
and op
2
are
said incompatible if there exists an attribute x which
is modified by op
1
and op
2
in one of the following
cases, where v
c
is the current value of x:
a. op
1
and op
2
increases and decreases x, resp.,
b. op
1
and op
2
set x to values v
1
and v
2
s.t. v
1
≠v
2
,
c. op
1
sets x to a value v
1
≥ v
c
while op
2
decreases x,
d. op
1
sets x to a value v
1
≤ v
c
while op
2
increases x.
We say that two active actions a and b are
conflicting when they are enabled (in rules ) and
their ARS-models contain respectively rules
“cond
a
→op
a
” and “cond
b
→op
b
” such that the
operations op
a
and op
b
are both enabled and
incompatible. Intuitively, situations where a and b
are conflicting imply the simultaneous executions of
incompatible operations, and hence must be avoided.
Let us give examples of conflicts which are
constructed from Examples of Sections 3 and 4.
Example 5.1: From Examples 3.5 & 3.8, accel()
and stop() are simultaneously enabled when the
condition C1: “Speed.module<minSpeed
approach(Stop)
reach(Stop)” is true. From
Example
4.1, the ARS-model of accel() contains
“true→Inc(Speed.module)”. From Example 4.3, the
ARS-model of stop() contains
“true→ Set(Speed.module,0)”. In these rules, the
operations Inc(Speed.module) and
Set(Speed.module, 0) are enabled (by condition
“true”) and incompatible (above case d). Therefore,
the actions accel() and stop() are conflicting when
the above condition C1 evaluates to true. Intuitively,
the car decides at the same time to accelerate
(because its speed is lower than the minimum speed
limit) and to stop (because it reaches a stop sign).
Example 5.2: From Examples 3.6 and 3.8,
avoid(FRobs) and stop() are simultaneously
enabled
when the condition C2: “close(FRobs)
approach(Stop)
reach(Stop)” is true. From
Example 4.2, the ARS-model of avoid(FRobs)
contains the rule “Speed.module < ν →
Inc(Speed.module)“. From Example 4.3, the ARS-
model of stop() contains the rule
“true→
Set(Speed.module,0)”. In these rules, the operations
Inc(Speed.module) and Set(Speed.module,0) are
simultaneously enabled when Speed.module<ν and
incompatible
(above case d). Therefore, the actions
avoid(FRobs) and stop() are conflicting when C2
Speed.module<ν evaluates to true. Intuitively, the car
decides at the same time to keep a non-null speed (to
avoid a close obstacle) and to stop (because it
reaches a stop sign.
5.4 Off-line Part of FI Detection
We adopt an online approach where FI detection and
resolution are executed repetitively. We must
minimize as much as possible the duration of each
iteration so that it is always shorter than the car
reaction time. For this purpose, preliminary steps for
FI detection will be executed off-line, and we will
execute on-line only the FI detection part that cannot
be done off-line.
FI detection means identifying conflicting
actions, i.e. actions that are enabled and
incompatible. Recall that actions a and b are
conflicting if their ARS-models contain rules R
1
and
R
2
whose respective operations are incompatible and
simultaneously enabled. Since “enabledness” of
actions and operations cannot be determined off-
line, the off-line part of FI detection is conservative,
DescribingFunctionalitiesandReactionsofCarsandManagingTheirFeatureInteractions
151
i.e. it proceeds as if all actions and operations are
enabled. More precisely, the off-line part of FI
detection (outlined below) constructs for every pair
of active actions (a,b), a set ARSmodel(a,b)
containing every pair (R
1
,R
2
) where R
1
and R
2
are
rules of ARSmodel(a) and ARSmodel(b) respectively,
whose operations are incompatible. The intuition is
that a and b are potentially conflicting if
ARSmodel(a,b) is not empty. The procedure
constructs the following graph:
Graph
of potentially conflicting actions (GPCA)
Its nodes correspond to active actions and its edges
link every pair of nodes a and b for which
ARSmodel(a, b)≠Ø. An edge between a and b is
denoted (a, b, ARSmodel(a, b)) and called edge (a,
b) labeled by ARSmodel(a, b).
Example 5.3: In Example 5.2, we have seen that
actions a=avoid(FRobs) and b=Car.stop() have their
AR-models containing respectively the incompatible
rules R
1
= “Speed.module < ν → Inc(Speed.module)”
and R
2
= “true → Set(Speed.module,0)”. In the off-
line part of FI detection, the pair (R
1
, R
2
) is inserted
in ARSmodel(a,b) and GPCA receives the nodes a
and b and the edge (a, b) labeled by ARSmodel(a,b).
Intuitively, a and b are potentially conflicting, and
ARSmodel(a,b) will be used online to determine
when a and b are effectively conflicting.
Off-line part of FI detection
Inputs: Every active action a and its set ARSmodel(a)
Result: Graph of potentially conflicting actions (GPCA)
Procedure:
| // Let N be set of nodes and E be the set of edges of
GPCA
| Initialize N and E to empty
| for each pair (a, b) of active actions:
| | // Compute ARSmodel(a, b)
| | Initialize ARSmodel(a, b) to empty
| | for each R
1
ARSmodel(a) and R
2
ARSmodel(b)
| | | if R
1
and R
2
are incompatible
| | | | insert the pair (R
1
, R
2
) in ARSmodel(a, b)
| | if ARSmodel(a, b) )≠Ø:
| | | if a is not in N: insert a in N
| | | if b is not in N: insert b in N
| | | insert (a, b, ARSmodel(a, b)) in E
5.5 Online Part of FI Detection
The online part of FI detection (outlined below)
consists in determining which of the potentially
conflicting actions are effectively conflicting. More
precisely, for every pair (a, b) of actions which are
potentially conflicting (i.e. ARSmodel(a, b))≠Ø, a
and b are effectively conflicting when they are
enabled and ARSmodel(a, b) contains a pair (R
1
,
R
2
) of enabled rules. The procedure constructs the
following graph:
Graph of conflicting actions (GCA): It is a
restriction of GPCA in the sense that it is obtained
from GPCA by removing edges linking actions
which are not effectively conflicting. An edge
between a and b is denoted by (a, b).
On-line part of FI detection
Input: GPCA
Result: Graph of conflicting actions (GCA)
Procedure:
| Initialize GCA to GPCA
| for each edge (a, b, ARSmodel(a, b)) of GCA
| | if a or b are disabled or
| | | ARSmodel(a, b) has no pair of enabled rules:
| | | Remove the edge
| Redefine every edge (a,b, ARSmodel(a,b)) as (a,b)
Example 5.4: In Example 5.3, the resulting
GPCA of the off-line part of FI detection, contains
the edge (a, b) labeled by ARSmodel(a,b), for a=
avoid(FRobs) and b= stop() which are potentially
conflicting. In the on-line part of FI detection, the
obtained GCA contains the edge (a, b) when a and b
are effectively conflicting, i.e. close(FRobs)
approach(Stop)
reach(Stop)
Speed.module<ν
(from Example 5.2).
6 ONLINE FI RESOLUTION
FI resolution targets to find a solution to each pair of
conflicting actions a and b represented by an edge
(a, b) in GCA. Our FI resolution consists of a local
treatment followed by a global treatment.
6.1 Local Treatment of FI Resolution
We assume that a priority() function is given which
assigns priorities to active actions. Two sets are
used: the set of Elected Actions (EA) and the set of
Blocked Actions (BA). For each edge (a, b) in GCA,
the local treatment inserts the most and least priority
actions in EA and BA respectively. A problem arises
when EA∩BA≠Ø. Consider for example two edges
(a, b) and (a, c) of GCA, i.e. a is conflicting with b
and c. Assume that priority(b) < priority(a) <
priority(c). In (a, b), a
is elected and b is blocked. In
(a, c), c is elected and a is blocked.
Hence,
EA={a,c}, BA={a,b}, EA∩BA={a}≠Ø. A question
arises: should a be elected or blocked? If we apply a
conservative decision by blocking a, then both a and
b are blocked, while the reason why b has been
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
152

blocked is for executing a. Hence since a is blocked,
it is useless to block b. To recapitulate, the
conservative solution is to block a and b, while a
more permissive solution is to block only a.
Example 6.1. Consider the three actions
a=stop(), b=accel() and c=avoid(FRobs). We have
seen in Examples 5.1 and 5.2 that a is conflicting
with b and c under some conditions. Assume that
those conditions are satisfied, and
priority(b)<priority(a)<priority(c). With the local
treatment, we obtain EA={a, c} and BA={a, b}. If
we apply the conservative decision, only c is elected,
i.e. avoid the obstacle. A more permissive decision
is to elect a and c, i.e. avoid the obstacle and
accelerate. Considering that obstacle avoidance
requires Speed,module
[ν,μ]), this scenario holds if
it is possible to accelerate without exceeding the
speed μ.
6.2 Global Treatment of FI Resolution
After the local treatment to the example of Section
6.1, we obtained EA={a, c} and BA={a, b}, hence a
is at the same time elected and blocked. The global
treatment solves this problem as follows. It starts by
applying a conservative decision by blocking a.
Formally, a is removed from EA, i.e. EA = EA\BA
(the symbol \ means set subtraction). We obtain
EA={c} and BA = {a, b}. The conservative decision
needs improvement. Indeed, since a is blocked there
is no reason to block b (it was blocked to avoid the
conflict between a and b). Hence the global
treatment transfers b from BA to EA. Formally,
EA={c}
{b}={b, c} and BA={a, b}\{b}={a}.
Hence, only a is blocked.
In the general case, we transfer iteratively to EA
every action of BA which is not conflicting with any
action of the current EA. The transfer is ordered
from the most priority to the least priority actions. A
formal definition of such a transfer is given in the
last part of the resolution procedure of Sect. 6.3
(Global treatment: transfer actions from BA to EA).
CA(a) is the set of actions which are currently
conflicting with action a (i.e. which are linked to a
in GCA); X is the set of actions of BA which do not
conflict with any action of EA; maxPriority(X) is
the action in X
with the greatest priority.
6.3 FI Resolution Procedure
The FI resolution procedure given below
implements the treatments presented in Sections 6.1
and 6.2. Note the last line of the procedure which
consists in electing all actions which do not conflict
with any other action.
Online FI resolution
Inputs: - Graphs of conflicting actions (GCA)
- Priorities of active ctions
Result: - The set of elected actions (EA)
- The set of blocked actions (BA)
Procedure
| // Local treatment: Compute EA and BA
| Initialize EA and BA to empty
| for each edge (a, b) in GCA
| | if priority(a) > priority(b)
| | | insert a in EA and insert b in BA
| | else: insert b in EA and insert a in BA
| //Conservative decision: remove from EA the actions
of BA
| EA = EA \ BA
| // Global treatment: transfer actions from BA to EA
| Compute X = {a BA | CA(a ) EA = }
| while X ≠
| | EA = EA U maxPriority(X)
| | BA = BA \ maxPriority(X)
| | X = {a BA | CA(a) EA = }
| Insert in EA all actions which are not in GCA
7 VALIDATION
We have validated our approach in many scenarios.
For example, as inputs for the ARS-procedure of
Section 5.2, we have used: an ARS-specification that
includes the rules given in Examples 3.*; ARS-
models that include the rules given in Examples 4.*;
and the following priorities:
priority(decel()) > priority(accel()),
priority(stop()) > priority(accel()),
priority(avoid(FLobs)) > priority(avoid(FRobs)),
priority(avoid(Lobs)) > priority(avoid(FRobs)).
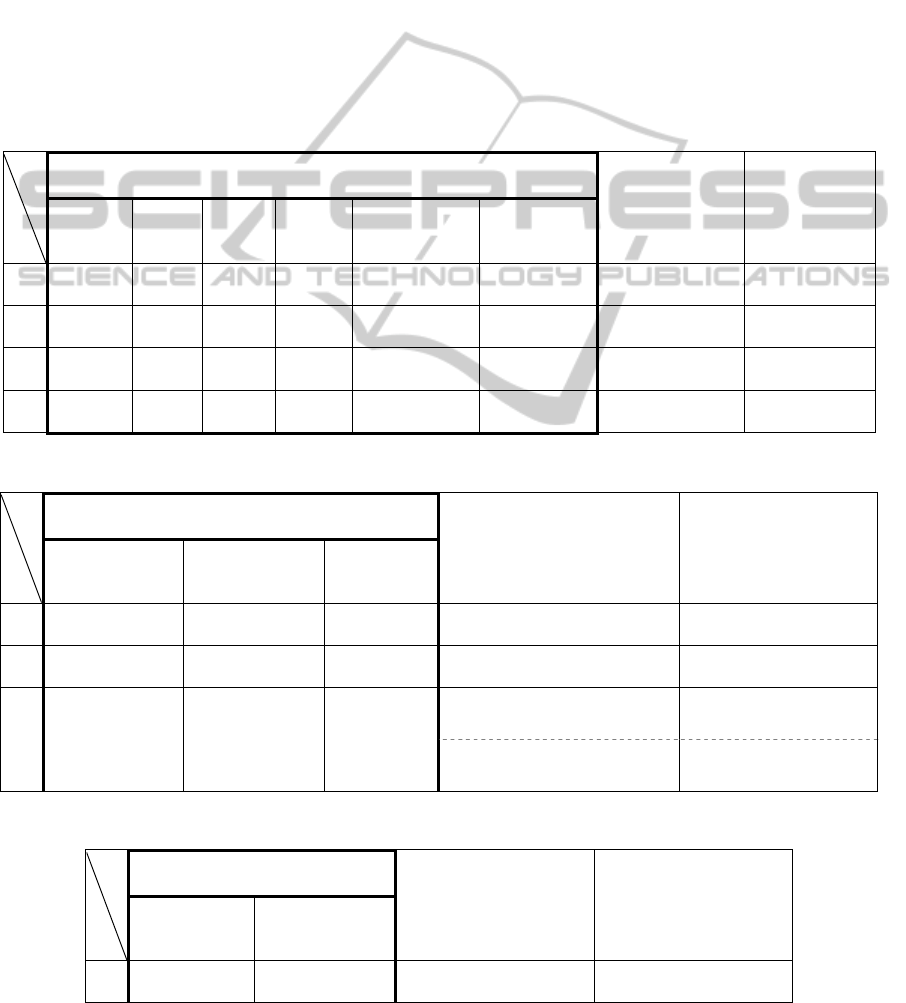
Table 1 represents examples of FI detection and
resolution involving the actions stop(), accel() and
decel(). Four configurations are considered which
are specified by the values (or intervals of values)
taken by the six parameters represented in columns
1-6 of Table 1: the current speed of the car, the car is
at downtown, the time is between 7am and 7pm, the
car is in a school neighborhood, the car is
approaching a stop, and the car has reached a stop.
All parameters are boolean, except the current speed
of the car which is of type double. Actually, each
configuration (corresponding to a row of the table)
abstracts several specific configurations, since it
specifies the values of only a part of the parameters.
In Table 1 (and also in Tables 2 and 3), the last two
columns represent the conflicting actions (FI
detection) and the elected action (FI resolution),
DescribingFunctionalitiesandReactionsofCarsandManagingTheirFeatureInteractions
153

respectively. In the “conflicting actions” column, are
indicated the column numbers (1 to 6) that have
implied each indicated action. For example,
accelerate (1,2) means that acceleration is implied
by each of the two facts: the car speed is < 30 (1),
and the car is in downtown (2).
Table 2 represents examples of FI detection and
resolution involving actions avoid(FRobs)
avoid(FLobs) and avoid(Lobs). Three configurations
are considered which are specified by the values
taken by the three boolean parameters represented in
columns 1-3 of Table 2: the car has a close obstacle
at her front right, the car has an a close obstacle at
her front left, and the car has a close obstacle in her
left side. Note the configuration 3 which generates
two FIs, due to the fact that avoid(FRobs) is
conflicting with avoid(FLobs) and avoid(Lobs).
Table 3 represents an example of FI detection
and resolution involving obstacle avoidance and
stopping.
8 RELATED WORK AND OUR
CONTRIBUTION
The method proposed in (Metger, 2004) for
managing FIs is conservative since it does not
consider the operational behavior of features. To our
knowledge, (Juarez-Dominguez et al., 2008b;
Juarez-Dominguez et al., 2008a; Juarez-Dominguez,
2008) present the most advanced automotive
framework dealing with FI detection. Below are
points by which we distinguish ourselves from the
latter references:
1. With ARS, a car is designed in three parts (Sects.
2-4). The fact of using several parts meets the
requirements of modularity and problem
decomposition.
2. We consider not only basic but also complex
actions. For example, “accelerate” and
“decelerate” are simple, while “make a U-turn”
and “avoid an obstacle” are complex.
3. We model actions at a high abstraction level (by
ARS-models), which permits to avoid state space
explosion (due to complex actions) in FI
detection and resolution.
4. We have opted for an on-line approach to
manage FIs, instead of an off-line approach using
model-checking.
5. In addition to FI detection, we study also FI
resolution.
6. In the 1
st
part of ARS, the car is designed as an
object depending on the elements of the car, and
on the environment that influences the car
behavior. Hence, the car environment can be
accessed from a single object.
Moreover, ARS contains the following specific
mechanisms which make it irreplaceable by other
systems:
a) The 1
st
part of ARS uses objects (such as School,
Stop, FRobs) which are automatically created
and destroyed under specific conditions.
Therefore, ARS must have a mechanism for such
automatic creation and destruction.
b) The 1
st
part of ARS uses methods (such as
not(park()), yes(park()), prepare(stop()) that
have a method as parameter. Therefore, the
compiler and code generator of ARS must have a
mechanism to such a type of methods.
9 CONCLUSIONS
We have developed a three-part Automotive
Reaction System (ARS) framework to provide cars
capabilities to react to various situations. Our
contributions and the relevance of ARS have been
highlighted in the previous Section 8. Here are some
points we plan to study for future work: the use of
variable priorities for FI resolution; FIs involving
more than two actions; FIs involving actions of
several cars; the scalability of our framework.
REFERENCES
Bouma, L. and Velthuijsen, H., editors (1994). 2
nd
Int.
Workshop on Feature Interactions in Telecom. Syst.
(FIW), Amsterdam. IOS Press.
Cheng, K. and Ohta, T., editors (1995). 3
rd
Int. Workshop
on Feature Interactions in Telecom. Syst. (FIW),
Kyoto. IOS Press.
Dini, P., Boutaba, R., and L, L., editors (1997). 4
th
Int.
Workshop on Feature Interactions in Telecom. Syst.
(FIW), Montreal. IOS Press.
Kimbler, K. and Bouma, L., editors (1998). 5
th
Int.
Workshop on Feature Interactions in Telecom. and
Soft. Syst. (FIW), Lund (Sweden). IOS Press.
Calder, M. and Magill, E. H., editors (2000). 6
th
Int.Workshop on Feature Interactions in Telecom. and
Soft. Syst. (FIW), Glasgow (Scotland, UK). IOS Press.
Amyot, D. and Logrippo, L., editors (2003). 7
th
Int.
Workshop on Feature Interactions in Telecom. and
Soft. Syst. (FIW), Ottawa (Canada). IOS Press.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
154
Reiff-Marganiec, S. and Ryan, M. D, editors (2005). 8
th
Int. Workshop on Feature Interactions in Telecom.
and Soft. Syst. (FIW), Leicester (UK). IOS Press.
du Bousquet, L. and Richier, J.-L., editors (2007). 9
th
Int.
Workshop on Feature Interactions in Software and
Comm. Systems (FIW). IOS Press.
Nakamura, M. and Reiff-Marganiec, S., editors (2009).
10
th
Int. Workshop on Feature Interactions in Soft. and
Comm. Syst. (FIW). IOS Press.
Juarez-Dominguez, A. (2008). FIs Detection in the
Automotive Domain. In IEEE/ACM Int. Conf. on
Automated Soft. Eng. (ASE).
Juarez-Dominguez, A., Day, N., and Fanson, R. (2008a).
Translating Models of Automotive Features in
MATLAB’s Stateflow to SMV to Detect FIs. In Int.
Systems Safety Conf. (ISSC).
Juarez-Dominguez, A., Day, N. and Joyce, J. (2008b).
Modeling Feature Interactions in the Automotive
Domain. In Int. Workshop on Models in Soft. Eng.
(MiSE).
Metger, A. (2004). Feature interactions in embedded
control systems. Computer Networks, 45(5):625–644.
APPENDIX
Table 1: First illustrative example of Section 7.
Parameters
FI detection:
Conflicting
actions
FI resolution:
Executed
action
1
Current
speed
2
Down-
town
3
time ∊
[7;19]
4
Near a
school
5
Approaching
a stop
6
Has reached
a stop
1
< 30 true true
accelerate (1,2)
stop (6)
stop
2
< 15 true True true
accelerate (1,3,4)
stop (6)
stop
3
< 30 true True
accelerate (1,2)
decelerate (5)
decelerate
4
< 15 true True True
accelerate (1,3,4)
decelerate (5)
decelerate
Table 2: Second illustrative example of Section 7.
Parameters
FI detection:
Conflicting actions
FI resolution:
Executed action(s)
1
Close to front
right obstacle
2
Close to front
left obstacle
3
Close to left
obstacle
1
true true false
avoid front right obs. (1)
avoid front left obs. (2)
avoid front left obs.
2
true false true
avoid front right obs. (1)
avoid left obs. (3)
avoid left obs.
3
true true true
avoid front right obs. (1)
avoid front left obs. (2)
avoid front left obs.
avoid front right obs. (1)
avoid left obs. (3)
avoid left obs.
Table 3: Third illustrative example of Section 7.
Parameters
FI detection:
Conflicting actions
FI resolution:
Executed action
1
Close to an
obstacle
2
Has reached
a stop
1
true true
avoid obstacle (1)
stop (2)
stop
DescribingFunctionalitiesandReactionsofCarsandManagingTheirFeatureInteractions
155
