
Can Random Noise Injection Eliminate Noise?
Simulation and Hardware Implementation
Suleyman Kondakci
Faculty of Engineering & Computer Sciences, Izmir University of Economics, Izmir, Turkey
Keywords:
Signal Reconstruction, Evoked Potentials, Semi–digital Signal Processing, Simulation, Implementation.
Abstract:
Noise, found in all types of instrumentation and signal processing systems, has been a great challenge to
tackle, especially, in biomedical signal processing tasks. Often, low-frequency and low power measurement
signals are used in biomedical signal applications. This work is aimed at modeling and developing a simple,
efficient, and inexpensive front end signal conditioner applying the cowpox approach to low-power analog
signal measurements. We focus here on the simulation and implementation of a signal conditioner for the
evaluation of its feasibility and efficiency based on the cost and accuracy constraints. As briefly outlined
below, this article can serve as a model for facilitating the construction of semi–digital filters that can be
applied to denoising of signals with low-frequency and very weak amplitude levels.
1 INTRODUCTION
This article presents a framework comprised of a con-
cise theoretical background, simulations, optimiza-
tion, and implementation of a novel semi–digital
waveform denoising system that effectively enhances
signal-to-noise ratio (SNR) of highly noisy measure-
ments in real–time. The presented approach is based
on the idea of cowpox vaccination combined with
a recursive filtering technique. In order to validate
the underlying method, we have built and evaluated
an experimental filter, which mainly decomposes the
noise–corrupted waveforms into a large number of
analog samples, generates random noise samples, and
injects the noise samples into the noise–corrupted
waveforms, and performs an an averaging process
in a recursive manner. The results obtained from
the implemented system comply with the results of
computer simulations and the underlying theoretical
method. Efficiency of the implemented system is op-
timized in terms of a desired noise reduction level,
number of recursions (waveforms), number of sam-
ples per waveform, and input noise level. There, ex-
ist several methods for filtering the random noise in
biomedical instrumentations, e.g., (Guo, 2011; Os-
try, 2006a; Zerguine et al., 2011; Momot, 2009; Pal
and Mitra, 2012; Kamavuako et al., 2009; Durand
and Froment, 2001; Kadambe and Srinivasan, 2006),
and (Sharma et al., 2010) are the sources amongst a
number of them that suggest different techniques to
tackle the problem. The uniqueness of our approach
lies in the modeling of the entire process, which uses
cowpox vaccination combined with an analog register
to thwart random noise components in a signal in the
real-time. The analog register is modeled as a charge–
transfer device (CTD), which stores individual sig-
nal samples as charge units in the register, (Janesick,
2001; Pain and Fossum, 1991) and (Cain and Mor-
ling, 1977). CTD of the implemented system stores
1024 signal samples as charge units while they are
being transferred (shifted) from cell to cell in order to
avoid excessive leakage of the charges. Signal denois-
ing is done by a synchronized cowpoxing and averag-
ing technique during the charge transfer in a recursive
manner. That is, samples of the noisy signal are mixed
with random noise samples by a summation process,
the output of the summation circulates through charge
cells while being delivered to the output of the filter.
The filter output also circulates recursively through
additional cowpoxing and summation operations un-
til the desired reduction levelis achieved. The number
of recursions can be preset at the beginning of filter-
ing or it can be automatically determined by observ-
ing the mean value of the output signal whether the
mean value has reached the stationary state.
1.1 Outline of the Paper
The remainder of this paper is organized as follows.
Section 2 gives a brief review on some related work
604
Kondakci S..
Can Random Noise Injection Eliminate Noise? - Simulation and Hardware Implementation.
DOI: 10.5220/0005011906040611
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 604-611
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

and Section 3 presents the fundamental theory de-
scribing the model, which is used as the main ap-
proach for the realization of the proposed system.
Section 4 introduces the methods used for the design
of experiments and simulations used throughout the
paper. Section 5 deals with the system simulation and
discusses the dynamics of the presented algorithm.
Section 6 discusses the overall system efficiency and
derives the parameters for an optimum noise reduc-
tion. Section 7 introduces the realized hardware and
Section 8 concludes the paper.
2 RELATED WORK
There have recently been many attempts to remove
random noise from various types of signals using sta-
tistical inference methods mostly based on wavelet
statistical models and Bayesian estimation, (Sameni
et al., 2007). A survey of theoretical and practi-
cal aspects of hardware implementation of wavelet–
based denoising filters is presented in (Gavrincea
et al., 2007). Traditional filter implementations deal
with cutting of unwanted frequency components, typ-
ically using low–pass, high–pass, or band–pass filter-
ing configurations. Since the frequency range of ran-
dom noise covers the entire frequency bandwidth of
the processed signal, using the conventional pass/cut–
based filtering method will also cut and distort the de-
sired signal while processing. The signal averaging
technique is an ideal solution to this essential prob-
lem, which recovers signal while quickly averaging
out random noise components.
The recursive semi-digital signal averaging
(RSDA) technique presented here bears also some
limitations compared to non–recursive or finite im-
pulse response (FIR) filters. Mainly, it can introduce
phase shifts cause also bandwidth limitations due to
the existence of feedback structures. This charac-
teristic can limit its applicability to measurements
involving very high frequency signal reconstruction
tasks. On the other hand, a non–recursive filter will
generally use more memory and CPU resources
for its applications, which makes its use difficult
in real–time applications, and more costly as well.
Though most medical signal measurements operate
with narrow–band signals, narrow–band filtering is
not considered by RSDA, however, (Choi and Cho,
2002) proposes a useful algorithm for the suppression
of narrow-band interference in direct sequence spread
spectrum systems, based on the open–loop adaptive
IIR notch filtering.
The application of signal averaging techniques
are relatively old but steadily shows up in different
applications, algorithms, and modifications. For
example, as early as, (Bogdanov, 1997) has presented
a comparison of discrete and continuous average
techniques applied to multi–component force trans-
ducers. Most statistical algorithms are CPU–intensive
and require more memory usage. An algorithm for
robust weighted averaging with automatic adjustment
of insensitivity parameter is introduced in (Leski and
Gacek, 2004), where also the ensemble averaging
and weighted averaging techniques are discussed in
some context. The weighted signal averaging method
(Laciar and Jane, 2001), different from the sample–
based averaging presented here, is also sensitive to
the presence of outliers in the measurement data,
however, it has to perform intensive computations
in order to estimate the noise variance in all signal
cycles.
Adaptive filtering, which has been a popu-
lar research field for decades, is suitable for the
reconstruction of periodic signals with very low
frequencies. Though its efficiency is mainly based on
the recursive estimation of error–free denoising and
signal tracking parameters (Tichavsky and Handel,
1995), an adaptive filter can be effective for batch
processing, but relatively inefficient in real–time
applications compared to the semi–digital averager
presented here.
Often, adaptive filtering gives good performance
in low–amplitude signal measurements, e.g., an
adaptive scheme for ECG enhancement is presented
in (Almenar and Albiol, 1999). Influence of low
frequency noise in adaptive estimation using the
LMS algorithm is discussed in (Brito et al., 2009).
A relatively computation–intensive approach is pre-
sented in (Laguna et al., 1992). A noise–constrained
least mean fourth adaptive algorithm focusing on the
learning speed of the adaptive algorithm is discussed
in a newer work (Zerguine et al., 2011). Approaches
given in (Momot, 2009) deals with a comprehensive
study of weighted averaging of electrocardiogram
(ECG), which applies Bayesian inference to the
analysis of filter performance. Regarding the
electrocardiography, an alternative noise reduction
algorithm used for rhythmic and multitrial biosignals
is presented in (Celka et al., 2008).
Wavelet–based denoising using (soft) thresh-
olding involves several steps (Donoho, 1995); (1)
performing a linear forward wavelet transform of the
noisy data, (2) obtaining and performing a soft thresh-
olding of the wavelet coefficients where the threshold
depends on the noise variance, and (3) the coefficients
obtained from step (2) are then used to obtain the
signal estimate for the reconstruction of the signal
(linear inverse wavelet transform). Obviously, this
CanRandomNoiseInjectionEliminateNoise?-SimulationandHardwareImplementation
605

involves an excessive number of operations compared
to the sample–based averager presented here. Though
the wavelet–based methods have been relatively
successful in denoising of biological signals (Prasad
et al., 2008), RSDA offers cost–effective real–time
solutions to signal reconstruction tasks compared to
computationally intensive wavelet–based, digital IIR
and FIR approaches.
3 CONCISE DESCRIPTION OF
THE METHOD
In contrast to widely encountered approaches used for
signal denoising, we use a straightforward averaging
technique applying the cowpox approach. Therefore,
the theory behind this technique is trivial and the im-
plementation of an appropriate filter is quite uncom-
plicated. We find several research done for denois-
ing and signal correction also applying statistical ap-
proaches, e.g., (Blanco-Velasco et al., 2008; Pal and
Mitra, 2012; Kabir and Shahnaz, 2012). For exam-
ple, (Blanco-Velasco et al., 2008) considers ECG sig-
nal denoising and baseline wander correction based
on the empirical mode decomposition, which decom-
pose a signal into a collection of AM–FM compo-
nents. Other known approaches, such as Fourier and
wavelet-based methods, use traditional data analysis
methods that require some predefined preprocessing
functions to represent the signal. However, the tech-
nique presented here is uncomplicated, requires no
preprocessing, and especially efficient in real-time de-
noising of evoked potentials an signals with some pe-
riodicity.
In the next section we use array notation for rep-
resenting the signal and noise samples, e.g., S[ ] and
RNG[ ] arrays. For convenience, we will use here the
vector notation to denote these quantities. The RSDA
algorithm decomposes the real–time input signal into
discrete samples represented in the form of time se-
ries consisting of the measurement signal components
(s) and independent random noise (n) components.
Thus, M × N noisy signal components are mixed to
construct a column vector space of M waveforms con-
sisting of N column vectors defined as
c
1
=
w
(1,1)
w
(2,1)
.
.
.
w
(M,1)
, ...,c
N
=
w
(1,N)
w
(2,N)
.
.
.
w
(M,N)
. (1)
Mean value of each column vector can be obtained as
C=
n
c
1
=
1
M
M
∑
r=1
w
(r,1)
,...,
c
N
=
1
M
M
∑
r=1
w
(r,N)
o
, (2)
where, r denotes the number of recursions, i.e., num-
ber of waveforms each with N samples. It is obvi-
ous that the average values c
1
,...,c
N
accomplish the
mean value of M waveforms into a single waveform
C, i.e., the wave sample space is now a column-wise
average of the input waveforms
C = {c
1
,c
2
,. ..,c
N
}.
As also supported by the simulation results, the higher
the number of waveforms the better denoising will be
achieved. This idea complies with the low of large
numbers, i.e., summing infinitely many large random
numbers will tend to be zero, see also Borel’s low
of large numbers, (Wen, 1991). Similarly, with the
cowpox approach here, we recursively add as many
noise samples as possible to the noisy signal so that
the noise samples from the original signal will be sub-
stantially reduced. The larger the number of repeti-
tions, the better the approximation tends to be. It can
be easily verified that the above averaging process can
be expressed in terms of a recursive function
W =
1
M
M
∑
r=1
W
(r,n)
!
n=1,2,...,N
. (3)
Where,
W
(r,n)
denotes the average value of rth itera-
tion of the input signals each having n samples, where
n can be set to at least 256 or more (e.g., 8192), de-
pending on the sampling frequency and the quality of
denoising required.
4 TEST SETUP
In order to determine the major parameters needed for
an adequate system implementation a detailed simu-
lation and associated real-time experiments with the
implemented prototype system have been performed.
With the test diagram shown in Figure 1, two types
of signals, ECG signals and stimuli responses of elec-
trodermalmeasurements (i.e., skin conductance)were
experimented together with a white noise source.
Thoughwe apply a special form of the averagingtech-
nique to mostly periodic signals, we find several dis-
tinctive approaches applied to different types of sig-
nals. The algorithm and source chosen for the gener-
ation of the random noise play an important role with
the cowpox method. Although we can find several im-
plementations of random noise generators, e.g., (Lee
et al., 2006) and (Ostry, 2006b), we preferred using a
very special method due to its strengths underlined
below. Our random noise generator (RNG) gener-
ates a sequence of 24-bit real numbers with uniform
distribution and highly independent outcomes in the
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
606

Filter
Filtered
Output
Noise
Output
RNG
In(ωt)
∑
In(ωt)
remover
RNG = Random Noise Generator
Figure 1: Diagram of the simulation and experiment setup,
where RNG denotes the random noise generator and In(ωt)
denotes the noisy measurement signal.
generated bit sequence. That is, the frequency of oc-
currence of each number in the sequence is approx-
imately the same (uniformity), and no one value in
the sequence can be inferred from the others (inde-
pendence). Due to its strength and easy of imple-
mentation, we have used the Blum-Blum-Shub (BBS)
algorithm, (Blum et al., 1986), which is claimed to
be a cryptographically secure pseudo-random bit gen-
erator. Considering BBS as RNG for all practical
purposes, the generated bit sequence is unpredictable
(extremely random). The strength of such a pseudo-
random number generator is such that given the first
k bits of the sequence, there is no practical algorithm
that can allow us to guess whether the next bit will
be 0 or 1 with probability greater than 1/2. Thus, the
RNG unit (Figure 1) generates 24-bit random noise
samples, which are further added to the noisy input
signal sample-by-sample. For the simulation real–
valued scalar quantities of clean input with a constant
gain K and a noise signal were generated by
S[ ] = K sin
2πn
N
, n = 0,1, ...,N, (4)
and
RNG[ ] = random(SNR,N); −60≤ SNR ≤ 0, (5)
respectively. Arranging the generated bits in the ar-
ray byte[ ] as a stream of 24-bit blocks (bytes each
having 24 bits) and passing the bit blocks byte-by-
byte through a 24–bit digital-to-analog (DAC) con-
verter produces a relatively high–resolution analog
data sample, which is stored in the random number
generator array RNG[ ]. That is, RNG[ ] is now an
array of N real numbers representing the noise sam-
ples. SNR denotes the signal–to–noise ratio in dB and
N denotes the number of samples for both input and
noise signals. As will be justified later, the higher the
number of samples, the better the noise reduction can
be achieved. Noisy input signal (w) to the averager
is constructed as sample–by–sample addition of the
elements of arrays S[ ] and RNG[ ]. The analog mem-
ory (CTD) used for the implementation of the filter
has a charge leakage factor that can diminish the sig-
nal level. The leakage factor can have a great impact
on the output if the number of recursions is extremely
high. Hence, the instantaneous level (ith sample) of
the signal measured at the output of the filter will cor-
respond to
A × (W
i
+ RNG
i
), A = e
−εrC
i
1−cos
2π
C
i
, (6)
where r denotes the current recursion count, A de-
notes the overall transfer function of CTD having C
memory cells, and ε stands for leakage factor for each
cell. In order to achieve higher accuracy, the transfer
function will be later (Section 5) modified with regard
to both signal and sampling frequencies and the num-
ber of recursions as well.
5 SIMULATION
In order to determine parameters for an optimum re-
source usage (CPU time and memory) and for the se-
lection of additional system components needed for
the realization of the system, we have simulated the
overall system with various configurations. In this
concise version of the paper, we present only a brief
formulation, related simulations, the implementation
of the simulated system, and results of experiments
with the implemented system. The simulation was
first carried on with the straightforward addition of
waveforms sample–by–sample
W
(r,n)
= W
(r−1,n)
+ w
(r,n)
, (7)
which has gradually increased the amplitude of the
sum with the increased number of iterations. Indeed,
this approach constitutes the ”traditional averaging”
technique invented several decades ago.
Obviously, increasing the number of recursions of
ensemble averaging leads to instable outputs. Refer-
ring to the results from both simulations and real–time
experiments, we have observed a significant level of
saturation in the output signal. If, after each recur-
sion, the output were scaled down by a certain factor,
the output could be kept at a stable level. Hence, Eq.
(7) has been experimentally modified to be
W
(r,n)
= A
h
W
(r−1,n)
+
w
(r,n)
− W
(r−1,n)
r
i
. (8)
Actual system parameters such as gain and charge
transfer leakage factor of the CTD used in the system
implementation were also modified in order to match
the simulation results. Most appropriately, the trans-
fer function
A = e
−εrC
1−cos
2πf
f
s
describing both the gain and the leakage factor of the
device chosen has been inserted into the averaging
CanRandomNoiseInjectionEliminateNoise?-SimulationandHardwareImplementation
607
function. Where, ε denotes the charge leakage factor,
r number of recursions, C gives the number of charge
cells, f and f
s
depict the signal and sampling frequen-
cies, respectively. Some results of the simulated ex-
periments are shown both in Figure 2 and Figure 3.
6 EFFICIENCY AND
OPTIMIZATION
We strictly aim at finding an optimum recursion count
that minimizes the noise level to an acceptable level.
Thus, it is important to determine the optimum num-
ber of recursions (i.e., processing power) needed to
effectively reconstruct a noisy signal in terms of a
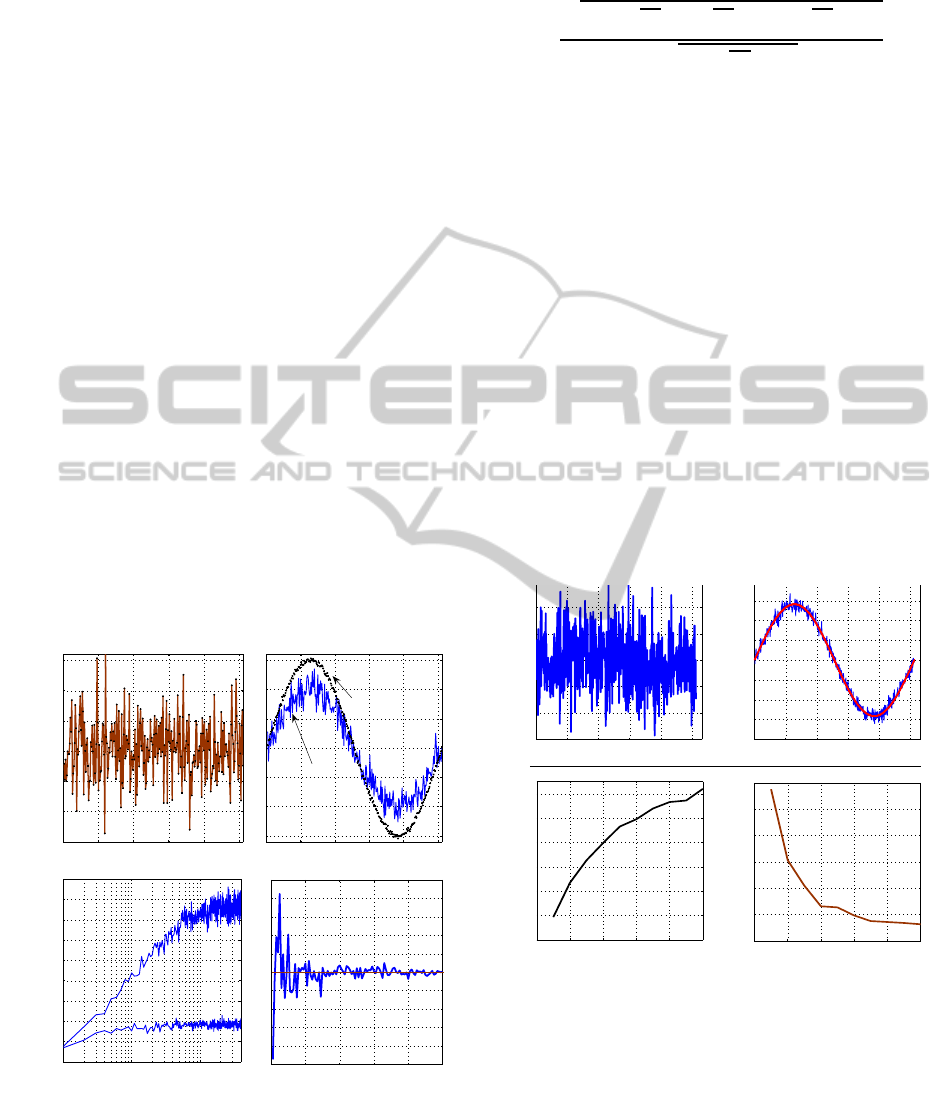
desired reduction factor. Figure 2 (a) and (b) show
the results from a simulated filtering process, whereas
Figure 2 (c) depicts the noise reduction with respect to
the number of recursions and Figure 2 (d) illustrates
the mean value of the averaged signals at each itera-
tion. The normalized noise reduction factor R can be
parameterized as
R ≡ f (ψ,r,N,K),
which can be further expressed in terms of RMS
input–output ratio ψ combined with the number of
samples per waveform (waveform size N) and the
0 50 100 150 200 256
−300
−200
−100
0
100
200
300
Amplitude
(a) Noisy Input; SNR =−40dB, 256 samples
0 50 100 150 200 256
−1.5
−1
−0.5
0
0.5
1
1.5
(b) Reconstructed signals
10 100 1000
5
10
15
20
25
30
35
40
45
50
(Recursions)x10
Log (reduction)
(c) Noise Reduction of −10 and −40 dB inputs
0 20 40 60 80 100
−10
−8
−6
−4
−2
0
2
4
6
8
10
(Recursions)x100
(d) Means at different recursions
Output of −10 dB input
Output of −40 dB input
Figure 2: The tendency in the mean values and noise re-
duction of reconstructed waveform using 10.000 recursions:
(a) Noisy input with -40dB SNR, (b) Filtered signals with
-10dB and -40dB inputs, (c) Noise reduction versus recur-
sions, (d) Mean values of filtered waveforms versus recur-
sions.
number of recursions r as
R =
q
∑
N
n=1
r
W
(r,n)
−
W
(r−1,n)
+ W
(r−1,n)
r
q
∑
N
n=1
(
W
(r,n)
)
2
. (9)
As depicted in Figure 2 (c), increase in the noise re-
duction is aligned with the theoretical description of
the input–output ratio ψ = RMS(In)/RMS(Out) and
the current number of recursions r until the estima-
tion parameters match the sample deviation and sam-
ple mean values, i.e., σ
2
≈ 1 and µ ≈ 0. The ef-
fect of the recursion count is illustrated in Figure 3,
where a 512 sample extremely noisy input signal, Fig-
ure 3 (a), was denoised using 4096 recursions, Figure
3 (b). The evolution of the cumulative reduction in
noise is shown in Figure 3 (c), and the corresponding
RMS values of the filtered output at different recur-
sion counts are shown in Figure 3 (d). These results
comply with the theoretical analysis, which empha-
size the fact that the amount of random noise will
always tend to converge to zero with the increased
amount of injected noise quantity along with the in-
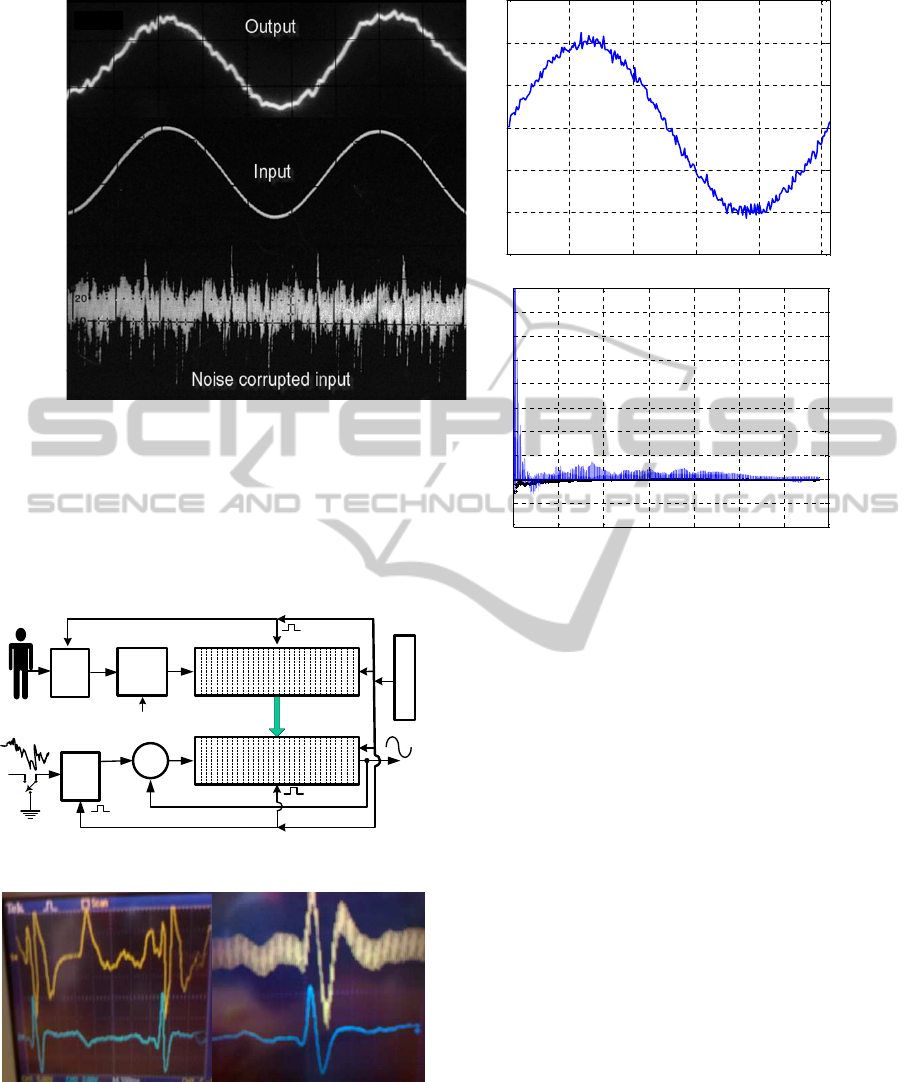
creased number of recursions. Figure 6 and 6 show
other results from the implemented system, which has
been tested with an extremely noisy sinusoidal stimu-
lus applied to a skin admittance measurement.
0 100 200 300 400 500
−30
−20
−10
0
10
20
30
(Samples)x8
Amplitude
0 100 200 300 400 500
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
(Samples)x8
Amplitude
0 2 4 6 8 10
18
20
22
24
26
28
30
(Samples)x400
20 log(RMS In/Out))
Noise Reduction
0 2 4 6 8 10
0
0.05
0.1
0.15
0.2
0.25
(Samples)x400
Mean value
Mean of averaged waveform
Figure 3: Effect of the injected white noise amount and the
recursion count varying from 64 to 4096 iterations.
7 PROTOTYPE
IMPLEMENTATION
We have designed and tested a relatively simple and
effective semi-digital system. A simplified block dia-
gram of the implemented system is shown in Figure
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
608
0 50 100 150 200 256
-1.5
-1
-0.5
0
0.5
1
1.5
0 1 2 3 4 5 6 7
x 10
4
-0.05
-0.025
0
0.025
0.05
0.075
0.1
0.125
0.15
0.175
0.2
Recursions
(a) Photo of the implementation result:
Oscilloscope screen of the real-time reconstruction
of extremely noisy input and denoised output using
68.000 recursions on the input with -40dB SNR.
(b) Simulation result of the same setup.
(c) Tendency in mean value of simulated output
(b) Simulation
(c) Tendency in mean value
(a)
Figure 6: Oscilloscope snapshot of noisy and clean inputs and outputs of an experiment and its simulation results.
S/H
Front end CTD
CLK-1
∑
S/H
Filter
Output
Processor CTD
Shift
CLK-2
Outlier
reject
Trigger &
Gain set
Control logic
Random noise
Figure 4: Block diagram of the prototype system.
(a) (b)
Figure 5: Construction of corrupted ECG signals, (a) with
electrode motion artifact, (b) with addition of power-line
signal.
4. Its hardware implementation contains two charge
transfer devices (CTDs) each consisting of 1024 ana-
log memory cells. The CTDs are bucket brigade de-
vice, (Scott and Chamberlain, 1980), type analog de-
lay line circuits manufactured by EG & G Reticon
TM
.
Results of an experiment with recording of a real–
time electrocardiogram (ECG) is shown in Figure 5,
where the first ECG signal was corrupted due to elec-
trode motion artifacts and the second reading was su-
perimposed by 50 Hz power-line signal.
8 CONCLUSIONS
In this article, we described a simple and efficient
method for signal reconstruction covering simulations
and design of a unique system that effectively en-
hances SNR in real–time. Basic theory of the pro-
posed system is already known from before, how-
ever, the approach and the design described here are
unique and efficient. Random noise injection into
noisy measurements is the novelty of our approach
not shown elsewhere. It is shown here that apply-
ing this approach (cowpox) to noisy signals followed
by averaging process can perform a superior denois-
ing, given that the noise of the input signal is also
random. The results obtained from the simulations
and real–time experiments comply with the associ-
ated theoretical analysis of signal averaging. Due
to extensive resource usage, digital signal averaging
CanRandomNoiseInjectionEliminateNoise?-SimulationandHardwareImplementation
609
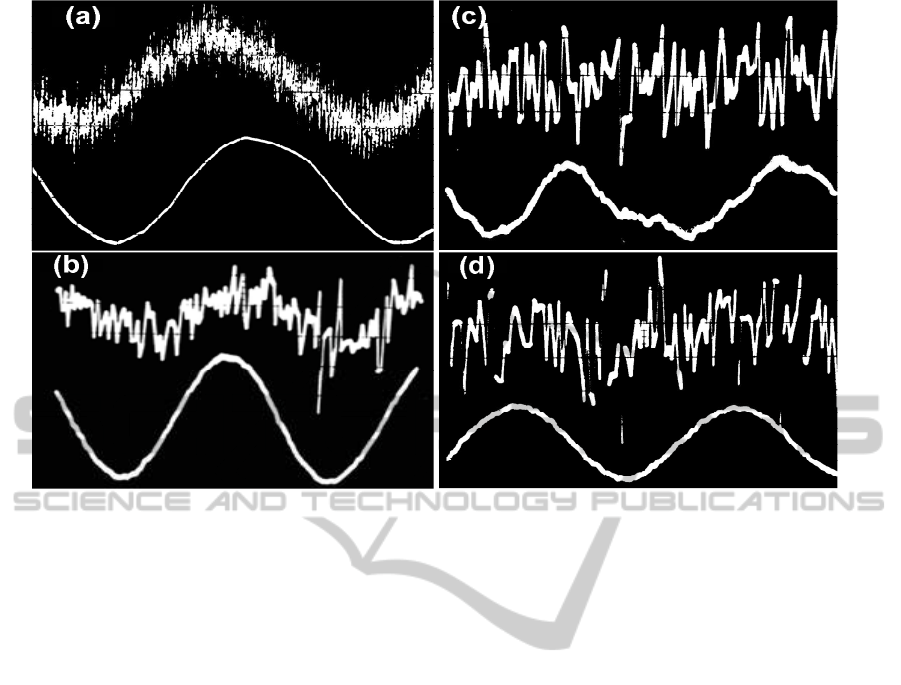
Figure 7: Oscilloscope snapshots of noisy inputs and denoised outputs.
technique is far more costly to implement compared
to its semi–digital counterparts. The unique design
presented here provides us a significantly inexpensive
solution that can deal with noisy analog signals hav-
ing very low frequency and amplitude ranges.
REFERENCES
Almenar, V. and Albiol, A. (1999). A new adaptive scheme
for ecg enhancement. Signal Process., 75(3):253–263.
Blanco-Velasco, M., Weng, B., and Barner, K. E. (2008).
ECG signal denoising and baseline wander correction
based on the empirical mode decomposition. Comput-
ers in Biology and Medicine, 38(1):1 – 13.
Blum, L., Blum, M., and Shub, M. (1986). A simple un-
predictable pseudo random number generator. SIAM
J. Comput., 15(2):364–383.
Bogdanov, V. V. (1997). Comparison of the efficiency of av-
eraging the signal from multicomponent force trans–
ducers by direct and discrete methods. MECHANI-
CAL MEASUREMENTS, 4(7):646–651.
Brito, D. S., Aguiar, E., Lucena, F., Freire, R. C. S., Yasuda,
Y., and Barros, A. K. (2009). Fast communication: In-
fluence of low frequency noise in adaptive estimation
using the lms algorithm. Signal Process., 89(5):933–
940.
Cain, G. and Morling, R. (1977). C.C.D. processor for
simultaneous time stretching and signal averaging.
Electronics Letters, 13(9):269–270.
Celka, P., Le, K., and Cutmore, T. (2008). Noise reduction
in rhythmic and multitrial biosignals with applications
to event-related potentials. Biomedical Engineering,
IEEE Transactions on, 55(7):1809–1821.
Choi, J. W. and Cho, N. I. (2002). Suppression of narrow-
band interference in ds-spread spectrum systems using
adaptive iir notch filter. Signal Process., 82(12):2003–
2013.
Donoho, D. (1995). De-noising by soft-thresholding. In-
formation Theory, IEEE Transactions on, 41(3):613–
627.
Durand, S. and Froment, J. (2001). Artifact free signal
denoising with wavelets. In Acoustics, Speech, and
Signal Processing, 2001. Proceedings. (ICASSP ’01).
2001 IEEE International Conference on, volume 6,
pages 3685–3688 vol.6.
Gavrincea, G., Tisan, A., Buchman, A., and Oniga, S.
(2007). Survey of wavelet based denoising filter de-
sign. In Electronics Technology, 30th International
Spring Seminar on, pages 112–116.
Guo, H. (2011). A simple algorithm for fitting a gaussian
function [dsp tips and tricks]. Signal Processing Mag-
azine, IEEE, 28(5):134 –137.
Janesick, J. R. (2001). Scientific Charge–coupled De-
vices. SPIE Press Monograph Vol. PM83, Belling-
ham, Washington.
Kabir, M. A. and Shahnaz, C. (2012). Denoising of ECG
signals based on noise reduction algorithms in EMD
and wavelet domains. Biomedical Signal Processing
and Control, 7(5):481 – 489.
Kadambe, S. and Srinivasan, P. (2006). Adaptive wavelets
for signal classification and compression. {AEU} -
International Journal of Electronics and Communica-
tions, 60(1):45 – 55.
Kamavuako, E. N., Yoshida, K., and Jensen, W. (2009).
Variance-based signal conditioning technique: Com-
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
610

parison to a wavelet-based technique to improve
spike detection in multiunit intrafascicular recordings.
Biomedical Signal Processing and Control, 4(2):118 –
126.
Laciar, E. and Jane, R. (2001). An improved weighted
signal averaging method for high-resolution ECG sig-
nals. Computers in Cardiology 2001, pages 69–72.
Laguna, P., Jane, R., Meste, O., Poon, P., Caminal, P.,
Rix, H., and Thakor, N. (1992). Adaptive filter for
event-related bioelectric signals using an impulse cor-
related reference input: comparison with signal av-
eraging techniques. Biomedical Engineering, IEEE
Transactions on, 39(10):1032–1044.
Lee, D.-U., Villasenor, J., Luk, W., and Leong, P. (2006).
A hardware gaussian noise generator using the box-
muller method and its error analysis. Computers,
IEEE Transactions on, 55(6):659 –671.
Leski, J. and Gacek, A. (2004). Computationally effective
algorithm for robust weighted averaging. Biomedi-
cal Engineering, IEEE Transactions on, 51(7):1280–
1284.
Momot, A. (2009). Methods of weighted averaging of ecg
signals using bayesian inference and criterion func-
tion minimization. Biomedical Signal Processing and
Control, 4(2):162 – 169.
Ostry, D. (2006a). Synthesis of accurate fractional Gaussian
noise by filtering. Information Theory, IEEE Transac-
tions on, 52(4):1609–1623.
Ostry, D. (2006b). Synthesis of accurate fractional gaussian
noise by filtering. Information Theory, IEEE Transac-
tions on, 52(4):1609 –1623.
Pain, B. and Fossum, E. (1991). Analog dynamic random-
access memory (ADRAM) unit cell implemented us-
ing a CCD with feedback. Electron Devices, IEEE
Transactions on, 38(1):178–179.
Pal, S. and Mitra, M. (2012). Empirical mode decompo-
sition based ECG enhancement and QRS detection.
Computers in Biology and Medicine, 42(1):83 – 92.
Prasad, V., Siddaiah, P., and Rao, B. (2008). Denoising of
biological signals using different wavelet based meth-
ods and their comparison. Asian Journal of Informa-
tion Technology, 7(4):146–149.
Sameni, R., Shamsollahi, M., Jutten, C., and Clifford, G.
(2007). A nonlinear bayesian filtering framework
for ECG denoising. Biomedical Engineering, IEEE
Transactions on, 54(12):2172–2185.
Scott, D. and Chamberlain, S. G. (1980). Modeling and
experimental simulation of the low-frequency transfer
inefficiency in bucket-brigade devices. Electron De-
vices, IEEE Transactions on, 27(2):405–414.
Sharma, L., Dandapat, S., and Mahanta, A. (2010). Ecg sig-
nal denoising using higher order statistics in wavelet
subbands. Biomedical Signal Processing and Control,
5(3):214 – 222.
Tichavsky, P. and Handel, P. (1995). Two algorithms
for adaptive retrieval of slowly time-varying multiple
cisoids in noise. Signal Processing, IEEE Transac-
tions on, 43(5):1116–1127.
Wen, L. (1991). An analytic technique to prove borel’s
strong law of large numbers. The American Mathe-
matical Monthly, 98(2):146–148.
Zerguine, A., Moinuddin, M., and Imam, S. A. A. (2011). A
noise constrained least mean fourth (nclmf) adaptive
algorithm. Signal Process., 91:136–149.
CanRandomNoiseInjectionEliminateNoise?-SimulationandHardwareImplementation
611
