
Relationship between Simulink and Petri Nets
Debjyoti Bera
1
, Kees van Hee
2
and Henk Nijmeijer
1
1
Dynamics and Control, Department of Mechanical Engineering, TU Eindhoven, Eindhoven, The Netherlands
2
Information Systems, Department of Mathematics and Computer Science, TU Eindhoven, Eindhoven, The Netherlands
Keywords:
Petri Nets, Simulink, Colored Petri Nets, CPN Tools, Discrete Event Systems, Time Driven Systems, Model
Checking, Performance Analysis.
Abstract:
Matlab/Simulink is an industrial tool that is widely used to design and validate control algorithms for embed-
ded control systems using numerical simulation. A Simulink model of a control system typically defines one
or more control algorithms together with their environment. Such models exhibit both discrete and continuous
dynamics, simulated by discretizing time. On the other hand, a colored Petri net (CPN) is a well known for-
malism for modeling behavior of discrete event systems. In this paper, we give a formal semantics to Simulink
using the CPN formalism, by describing how Simulink models can be expressed as a CPN. We also show how
Petri nets can be simulated in Simulink. Finally, we show how a CPN model can be used for performance
analysis of a Simulink model.
1 INTRODUCTION
The use of Matlab/Simulink is one of the de facto
standards in the design of embedded control systems.
A Simulink model describes a time driven dynamic
system (Cassandras and Lafortune, 2006) as a set of
mathematical equations, evaluated at discrete points
in time. In general, a model of a control system con-
sists of a set of controllers and its environment (also
referred to as a plant). The goal is to define a mathe-
matical model of a controller, given a model of its en-
vironment and a set of requirements that a controller
must satisfy. Such models may contain both discrete
(difference equations) and continuous parts (differen-
tial equations). An exact solution of such a model
is in many cases not computable, therefore it is ap-
proximated by numerical simulation methods, i.e. by
discretizing time into time steps, whose minimum is
bounded by the resolution of the system. The results
obtained from numerical simulation are used as a ref-
erence to validate the behavior of both the model and
the implemented system (described in lower level lan-
guages like C).
An embedded control system is a discrete event
system (DES) (Cassandras and Lafortune, 2006)
whose state evolution depends entirely on the occur-
rence of discrete events (instantaneous) over time, like
”button press”, ”threshold exceeded” etc. The under-
lying time-driven dynamics (expressed as difference
and/or differential equations) of an embedded control
system are captured by the notion of time progression
in a state (i.e. the time elapsed between consecutive
event occurrences).
On the one hand, the formal specification and ver-
ification of a DES is well studied in the context of au-
tomata theory (Hopcroft and Ullman, 1979) and Petri
nets (Reisig, 1985; Peterson, 1981). Both these for-
malisms have been extended with the notion of time
(Alur and Dill, 1994; Bowden, 2000) (e.g. Timed
Automata, time Petri nets) and support model check-
ing of timed properties expressed in temporal logics.
On the other hand, Simulink has only informal se-
mantics and of course an operational semantics in the
form of an implementation in software. So it is not
clear how a Simulink model can be incorporated into
a formal framework. Many attempts have been made
to address this shortcoming by proposing translations
of Simulink models into existing formal frameworks
(Agrawal et al., 2004; Denckla and Mosterman, 2005;
Tripakis et al., 2005; Tiwari, 2002; Zhou and Ku-
mar, 2012). However, most of these proposals re-
strict themselves to a subset of Simulink features and
do not formally capture the behavior of a simula-
tion run in Simulink. It is only in (Bouissou and
Chapoutot, 2012), that a formal operational semantics
of Simulink is defined. Unlike other approaches that
focus on formalizing the solution method of equa-
tions encoded by a Simulink model, the semantics de-
12
Bera D., van Hee K. and Nijmeijer H..
Relationship between Simulink and Petri Nets.
DOI: 10.5220/0005012000120023
In Proceedings of the 4th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2014),
pages 12-23
ISBN: 978-989-758-038-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

scribed here captures the behavior of the simulation
engine itself, describing the outcome of a numerical
simulation.
In this paper, we give a formal semantics to
Simulink models using the Petri net formalism. The
class of Petri nets present some inherent advantages
over automata: (a) Petri nets are graphically intuitive
and capture the structural information of a system,
(b) A finite automaton can be represented as a Petri
net but not vice versa; as a result Petri nets represent
a larger class of languages than the class of regular
languages, and (c) Structural analysis techniques of
Petri nets overcome the drawbacks of state space ex-
ploration techniques for analysis of behavior. Further-
more, there are many extensions of time in Petri nets
(van Hee and Sidorova, 2013) and their relationship
to Timed Automata is well studied (Bera et al., 2013;
Cassez and Roux, 2006). We focus on one such exten-
sion, namely Colored Petri nets (CPN) (Jensen et al.,
2007). A CPN is an extension of a Petri net with time
and data, and therefore an ideal choice for modeling
behavior of Simulink models. The state space reduc-
tion technique presented in (Bera et al., 2013; van Hee
and Sidorova, 2013) can be used to model check a
CPN (after discarding data). Furthermore, the mod-
eling and analysis of a CPN is well supported by the
popular CPN Tools. We also show how a Petri net
can be expressed as a Simulink model. Furthermore,
using a CPN model expressing a Simulink model, we
show how existing model checking techniques can be
used for performance analysis.
This paper is structured as follows: In the Sec. 2,
we present an informal description of Petri nets and
CPN. In the Sec. 3, we discuss the underlying con-
cepts of Simulink and show how a Simulink model
can be expressed as a CPN model. In the Sec. 4, we
show how a Petri net can be expressed as a Simulink
model. In the Sec. 5, we show how performance prop-
erties of a Simulink model can be verified. In the
Sec. 6, we present our conclusions.
2 CONCEPTS
A Petri net (PN) is a bipartite graph consisting of two
types of nodes, namely places (represented by a cir-
cle) and transitions (represented by a rectangle). We
give an example of a Petri net in the Fig. 1. The nodes
labeled P1 and P2 are called places and the node la-
beled A is called a transition. A place can be con-
nected to a transition and vice-versa by means of di-
rected edges called arcs. The notion of a token gives
a Petri net its behavior. Tokens reside in places and
often represent either a status, an activity, a resource
Figure 1: An example of PN and CPN.
or an object. The distribution of tokens in a Petri net
is called its marking or state. Transitions represent
events of a system. The occurrence of an event is de-
fined by the notion of transition enabling and firing.
A transition is enabled if all its input places have at
least one token each. When an enabled transition fires
it consumes one token from each input place and pro-
duces one token in each output place, i.e. changes the
state. Apart from arcs between places and transitions
there are two other types of arcs, namely inhibitor and
reset arcs. An enabled transition having an inhibitor
arc (represented as an edge having a rounded tip from
transition A to place Q1) can fire only if the place as-
sociated with the inhibitor arc does not contain con-
sumable tokens, i.e. place Q1. A transition connected
by a reset arc (represented as a dotted edge from tran-
sition A to place Q2) to a place, removes all tokens
residing in that place (i.e. Q2) when it fires.
A colored Petri net (CPN) is an extension of a
Petri net with data and time. We give an example
of a counter modeled as a CPN in the Fig. 1. Each
place has an inscription which determines the set of
token colours (data values) that the tokens residing in
that place are allowed to have. The set of possible to-
ken colours is specified by means of a type called the
colour set of the place (for eg. the place counter has
a color set of type integer denoted by INT ). A token
in a place is denoted by an inscription of the form x‘y
(see token 1‘5), interpreted as x tokens having token
color y, i.e. as a multiset of colored tokens. Like in a
standard Petri net, when a transition fires, it removes
one token from each of its input places and adds one
token to each of its output places. However, the col-
ors of tokens that are removed from input places and
added to output places are determined by arc expres-
sions (inscriptions next to arcs).
The arc expressions of a CPN are written in the
ML programming language and are built from typed
variables, constants, operators, and functions. An arc
expression evaluates to a token color, which means
exactly one token is removed from an input place or
RelationshipbetweenSimulinkandPetriNets
13

added to an output place. The arc expressions on input
arcs of a transition together with the tokens residing
in the input places determine whether the transition
is color enabled. For a transition to be color enabled
it must be possible to find a binding of the variables
appearing on each input arc of the transition such that
it evaluates to at least one token color present in the
corresponding place. When the transition fires with
a given binding, it removes from each input place a
colored token to which the corresponding input arc
expression evaluates. Firing a transition adds to each
output place a token whose color is obtained by eval-
uating the expression (defined over variables of input
arcs) on the corresponding output arc. In our exam-
ple, the variables d1 and d2 are bound to the value
of the token (value 5) in place counter. When one of
the transitions, say add fires, it produces a token with
value d1 + 1 = 6 in the place counter. Furthermore,
transitions are also allowed to have a guard, which is a
Boolean expression. When a guard is present it serves
as an additional constraint that must evaluate to true
for the transition to be color enabled. In our example,
the guard d1 < 10 ensures transition add can fire if
the value of the token in place counter is less than 10.
In addition, tokens also have a timestamp that
specifies the earliest possible consumption time, i.e.
tokens in a place are available or unavailable. The
CPN model has a global clock representing the cur-
rent model time. The distribution of tokens over
places together with their time stamps is called a
timed marking. The execution of a timed CPN model
is determined by the timed marking and controlled by
the global clock, starting with an initial value of zero.
In a timed CPN model, a transition is enabled if it is
both color enabled and the tokens that determine this
enabling are available for consumption. The time at
which a transition becomes enabled is called its en-
abling time. The firing time of a timed marking is the
earliest enabling time of all color enabled transitions.
When the global clock is equal to the firing time of a
timed marking, one of the transitions with an enabling
time equal to the firing time of the timed marking is
chosen non-deterministically for firing. The global
clock is not advanced as long as transitions can fire
(eager semantics). When there is no longer an en-
abled transition at the current model time, the clock is
advanced to the earliest model time at which the next
transition is enabled (if no such transition then it is
a deadlock), i.e. the firing time of the current timed
marking. The time stamp of tokens are written af-
ter the @ symbol in the following form x‘y@z, inter-
preted as x tokens having token color y carry a times-
tamp z. When an enabled transition fires, the pro-
duced tokens are assigned a color and a timestamp by
evaluating the time delay interval, inscribed on out-
going arcs of a transition (see time interval @[a,b]).
The time stamp given to each newly produced token
along an output arc is the sum of the value of the cur-
rent global clock and a value chosen from the delay
interval associated with that arc. Note that the firing
of a transition is instantaneous, i.e., takes no time.
3 EXPRESSING SIMULINK
MODELS USING PETRI NETS
In this section, we describe the basic concepts under-
lying a Simulink model, namely signals, blocks and
system. For these concepts, we give a formal seman-
tics using the CPN formalism. First, we show how a
Simulink block can be modeled as a CPN, which we
will call a P-block. A few simple rules describe how
a set of P-blocks can be connected to construct a sys-
tem, which we will call a P-system. The blocks of a
Simulink system are executed in a certain order called
the block execution order. We show how the block ex-
ecution order of a Simulink system can be modeled as
a CPN, on top of an existing P-system. The resulting
system describes fully the behavior of a simulation in
Simulink and we call it a C-system.
3.1 Signals, Blocks and System
Signals and Blocks are the two basic concepts of a
Simulink model. A signal is a step function in time,
representing the behavior of a variable. So only at
discrete points in time, the value of a variable may
change. Furthermore, a signal in Simulink can have
one of the following types: integer, real, complex or
its multi-dimensional variants.
A block defines a relationship between a set of
signals and possibly a variable representing its state
(state variable). If a block has a state variable then
it is a stateful block, otherwise it is a stateless block.
The set of signals belonging to a block are either of
type: input or output. A block can have zero or more
inputs and at most one output and one state variable.
A stateless block defines an output function f :
I
n
→ O, where I is the set of inputs, O is the set of
outputs and n is the number of inputs of the block. A
stateful block defines an output function f : I
n
× S →
O and an update function g : I
n
×S → S, where I is the
set of inputs, O is the set of outputs, S is the set of state
variables and n is the number of inputs of the block.
The output function of a stateful block must be evalu-
ated before its update function is evaluated. The result
of evaluating the update function of a stateful block
(say unit delay block as in the Fig. 2), updates its state
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
14

Figure 2: Commonly Used blocks in Simulink.
variable S which is expressed by S
0
, so S
0
= g(X, S).
Furthermore, the initial condition of a stateful block
is specified by the initial value of its state variable.
A block also has an associated sample time that
states how often a block should repeat its evaluation
procedure. The sample time of a block must be a
multiple of the time resolution of a system called the
ground sample time.
A Simulink model is a directed graph where a
node corresponds to a block represented as either a tri-
angle, rectangle or circle and a directed edge between
blocks corresponds to a signal. A signal models the
data dependency between the output of one block and
the input of another block. An output from a block
can be connected to input of one or more other blocks.
Note that the output of a block can be split into two
or more copies which serves as an input to multiple
blocks. However, the output signals of two or more
blocks cannot join to become one input for another
block. We call a network of blocks connected over
signals in this manner as a system. If all blocks of
a system have the same sample time then we call it
an atomic system. A subset of blocks belonging to a
system and having the same sample time is called an
atomic subsystem.
A mathematical model of a dynamic system is
a set of difference and differential equations. Such
equations can be modeled as a system in Simulink. A
simulation of such a system solves this set of equa-
tions using numerical methods. The state of a system
is defined as the valuation of all its output variables
(signals) and state variables. So from an initial state
of the system the behavior in the state space is com-
puted in an iterative manner over discrete time steps
bounded by the ground sample time. A block hav-
ing a sample time equal to the ground sample time is
called a continuous block. All other blocks are dis-
crete blocks and have a sample time that is equal to
an integer multiple of the ground sample time. For
continuous integration, the whole simulation is re-
peated several times within one ground sample time
(depending on the numerical integration method, i.e.
solver type) to get a better approximation and detect
zero crossing events (Bouissou and Chapoutot, 2012).
Note that discrete blocks change their outputs only
at integer multiples of the ground sample time which
implies that the input to continuous integration blocks
remains a constant. However, we neglect the numeri-
cal refinement of the ground sample time and consider
only one integration step per ground sample time.
The output and update functions of a block can be
programmed in Simulink using a low level program-
ming language such as C. However, some commonly
used constructs are available as predefined config-
urable blocks in Simulink. In the Fig. 2, we give a
few examples of commonly used blocks in Simulink
consisting of five stateful blocks (unit delay, discrete
derivative, discrete integrator-A, discrete integrator-
I, continuous integrator) and three stateless blocks
(gain, add/sub and switch). We assume a ground sam-
ple time of h time units and k ∈ N.
The unit delay block is a stateful block having one
input signal X , a state variable S and one output signal
Y . A unit delay block serves as a unit buffer by delay-
ing the current value of its input signal by one sample
time, i.e. h.k time units in the following way: The
output function f assigns the current value of its state
variable to its output Y . The update function g copies
the current value of its input signal to its state vari-
able. After every h.k time units, the output function is
evaluated and then its update function.
The gain block is a stateless block that produces
as its output the current value of its input signal mul-
tiplied by some constant (specified as a block param-
eter). The add/sub block is a stateless block that pro-
duces as its output the sum/difference of the current
value of its input signals. The switch block is a state-
less block that produces as its output either the current
value of signal X or signal Y depending on the valua-
tion of the boolean expression defined over signal C.
The continuous integrator block is a stateful block
that receives as its input (signal X) the derivative of
the state variable S (i.e. the rate of change of val-
uation of the state variable). The output function f
assigns the current value of its state variable S to its
output Y . The update function g, updates the value
of its state variable by integrating the product of the
derivative and the ground sample time. The discrete
integrator-I block is similar to the continuous integra-
RelationshipbetweenSimulinkandPetriNets
15
tor block. The only difference is that the sample time
of the block is an integer multiple of the ground sam-
ple time. The discrete integrator-A block accumulates
the sum of values of its input signal and updates its
state variable with this value. The output function of
this block copies the current value of its state variable
to its output. Note that Simulink blocks such as trans-
fer function and state space are similar to continuous
integrator blocks.
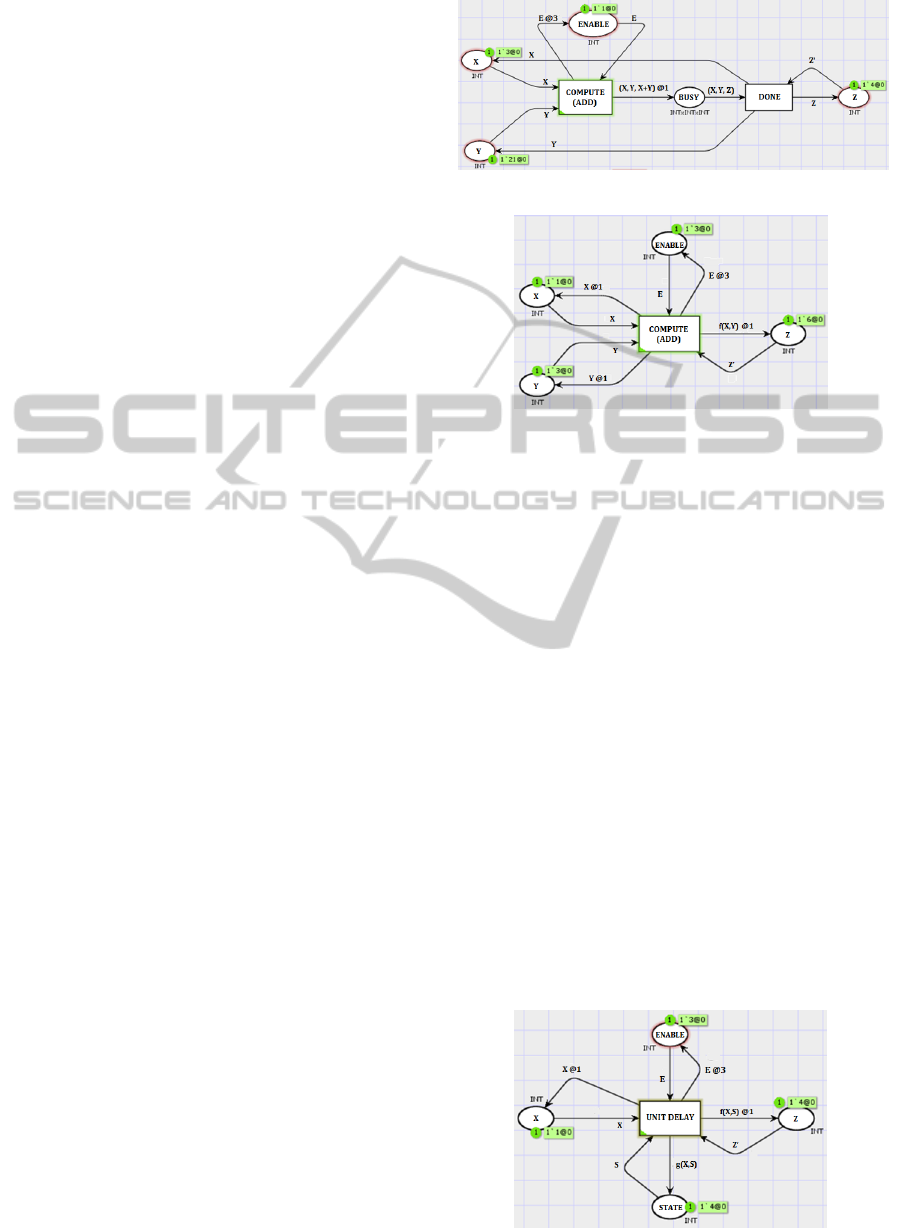
Modeling Simulink Blocks. In the Fig. 3, we
show with an example (add block) how a stateless
block can be modeled as a P-block. A signal is mod-
eled as a place having one colored token (see places
X, Y and Z). The valuation of this colored token is
a step function over time, i.e. its value maybe up-
dated by a transition at discrete points in time. A
stateless block has two transitions compute and done
connected over a shared place busy. The former tran-
sition has an incoming arc from each of its places
modeling its inputs and the latter is connected with
bi-directional arcs to the place modeling its output.
The availability of the token in place enable concerns
the sampling rate. The incoming arc to the place en-
able, specifies the sample time of the block. In our
example, the add block has a sample time of 3, since
the token in the place enable is delayed by 3 time
units, each time the compute transition fires. When a
compute transition fires, it consumes one token each
from its inputs (X and Y ) and produces one token in
the place busy having a color value determined by
evaluating its output function. For an add block, the
output function f (X,Y ) = X +Y . The execution time
of the compute transition (called the block execution
time) is modeled as a delay along the outgoing arc
from the compute transition (see delay of 1 time unit
along the incoming arc to the place busy). Note that
it is also possible to specify the block execution time
as a time interval. When the token in the place busy
becomes available, transition done consumes this to-
ken and produces back one token in each of the in-
puts of the block (places X and Y with color value
unchanged) and updates the color value of the token
in its output with the computed result from the output
function. This way of modeling a P-block is good for
understanding its behavior. However, for a compact
representation, the model of a P-block can be simpli-
fied by merging together the transitions compute and
done into one transition. In the Fig. 4, we show a sim-
plification of the add block. However, such a model
can only be used if the block execution time is spec-
ified as a fixed point delay. This is because a time
interval specifying a block execution time allows dif-
ferent choices of timestamps for tokens produced in
the input and output places of the block. For the re-
Figure 3: An example of a Stateless Block (P-Block).
Figure 4: Simplification of the P-Block (Stateless).
mainder of this section, we will consider block execu-
tion times as a fixed point delay and use the simplified
model of a P-block to present our concepts.
The P-block of a stateful block has all the con-
cepts of a stateless block, and in addition is extended
in the following way: (a) add a special place state
containing one colored token representing the state of
the block and connect it with bi-directional arcs to the
block’s transition specifying the output function, (b)
define the update function along the outgoing arc to
place state. In the Fig. 5, we give an example of an
unit delay block modeled as a stateful P-block. The
update function g(X, S) = X is updating the state vari-
able and the output function f (X,S) = S is updating
the value of the token residing in the output place of
the block.
3.2 Modeling in Simulink
In the Fig. 6, we present an example of a cruise con-
trol system modeled in Simulink. The model is an
adaptation of the example in the paper (Bouissou and
Figure 5: An example of a Stateful Block (P-Block).
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
16
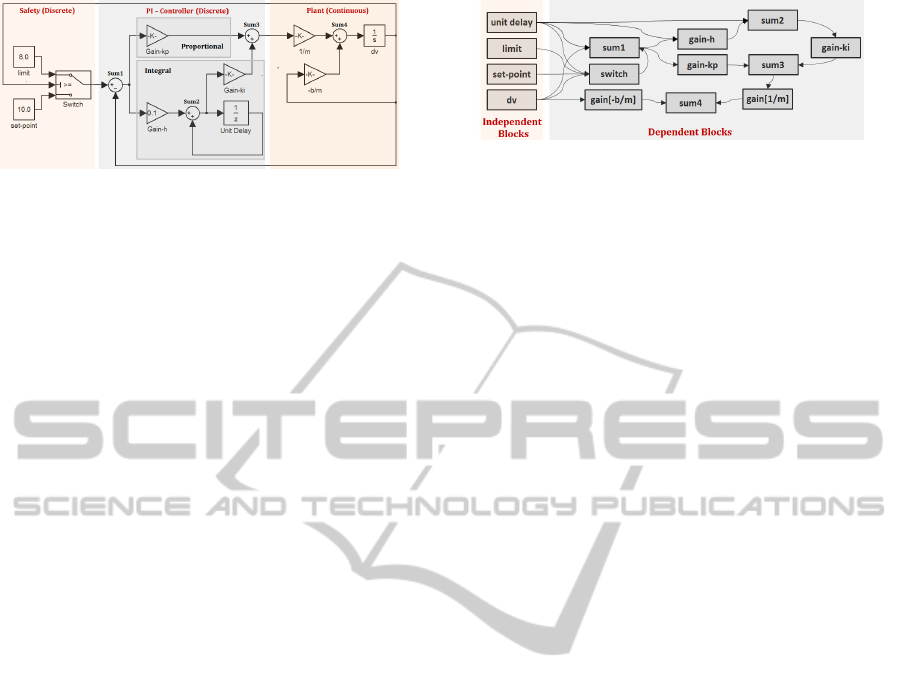
Figure 6: Simulink Model: Cruise Controller.
Chapoutot, 2012). We consider this example because
it is simple and covers all relevant modeling aspects
of Simulink. The system consists of three main parts:
(a) the plant (the device being controlled), (b) the PI
(proportional-integral) controller, and (c) the safety
mechanism. The plant approximates continuous be-
havior whereas the other parts are discrete. The safety
mechanism ensures that the velocity of the plant does
not exceed a specified limit.
The plant models continuous behavior of a vehicle
whose speed v and position x is given by the equation:
m ˙v = −b.v(t)+u(t) and ˙x = v(t), where m is the mass,
b is the friction coefficient, ˙x and ˙v are the derivatives
of x and v w.r.t time t and u(t) is the power of the en-
gine over time. The above equation is implemented
in the Simulink model (see Fig. 6) region highlighted
as plant (continuous) consisting of one sum block,
two gain blocks that multiply their input by a factor
1/m and −b/m and one continuous integrator block
labeled dv. All blocks of the plant have a sample time
equal to the ground sample time h of the system.
A standard PI controller is modeled with its two
parts labeled proportional and integral. The goal of
the PI controller is to produce as output, the power de-
mand u(t) such that the the velocity of the plant v(t)
converges to the desired velocity, produced as output
of the switch block, as quickly as possible. Note that
the unit delay block acts as a unit buffer and serves
for discrete integration (Euler method). The remain-
ing blocks define the safety mechanism. The switch
block monitors the current velocity of the plant. If it
exceeds some specified threshold, then it produces as
its output, the output of the limit block, otherwise the
output of the set-point block is chosen. All blocks of
the PI controller and Safety are discrete and have a
sample time of h.k time units, where k is an integer.
Modeling Simulink System. Given a set of P-
blocks, we model a P-system by fusing the input
places of blocks with the output place of blocks, rep-
resenting the same signal (i.e. having the same place
label). Note that two or more blocks are not allowed
to have the same output place because in Simulink,
blocks have only one output and this is modeled in P-
blocks with a unique output place. To keep the figure
readable, we consider only the integral part of the PI
Figure 7: Dependency Graph: Cruise Controller.
controller (with h = 1 and k = 10) and model it as a
P-system in the Fig 9.
3.3 Execution of Simulink Models
The blocks of a Simulink model are executed in a
sorted order. To determine this sorted order, we dis-
tinguish between two types of blocks, namely inde-
pendent blocks and dependent blocks. If the output
function of a block is defined over only its state vari-
able (i.e. does not depend on its inputs), then we call
it an independent block, otherwise we call it a depen-
dent block. The order in which independent blocks
are evaluated is not important. However, the order
in which the output of dependent blocks are evalu-
ated is important because the output of a dependent
block must be computed only after all other blocks
that produce an input to this block have been eval-
uated. This kind of dependency induces a natural or-
dering between blocks of a Simulink model which can
be represented as a directed graph (blocks as nodes,
dependency between blocks as directed edges) repre-
senting the order in which blocks of a Simulink model
must be evaluated, i.e. a directed edge from block A
to block B indicates that block A must be evaluated
before block B. We call this graph as the dependency
graph of a Simulink system. For the example pre-
sented in the Fig. 6, the dependency graph between
blocks is shown in the Fig. 7. The block sorted order
is a sorted sequence of blocks whose ordering satis-
fies the dependency graph of a Simulink system. The
sorted order of a Simulink system is determined by
the simulation engine before the start of a simulation.
The simulation engine of Simulink executes the
contents of a Simulink model (blocks) according to
the block sorted order. Each execution of the block
sorted order is called a simulation step. In each simu-
lation step, every block occurring in the model is vis-
ited according to the block sorted order and the fol-
lowing condition is checked for each block: if the
time elapsed since this block’s last execution equals
its sample time, then the block produces its output,
otherwise the block execution is skipped, i.e. the
block’s functions are not reevaluated. The time that
is allowed to elapse between each simulation step is
a multiple of the ground sampling time called the
RelationshipbetweenSimulinkandPetriNets
17
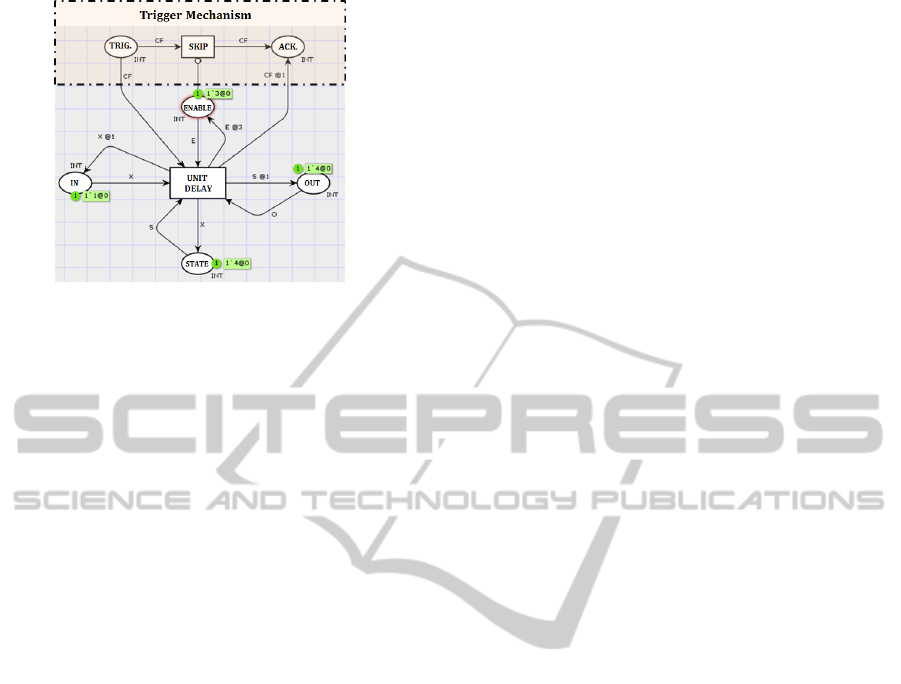
Figure 8: Triggering Mechanism in P-blocks.
step size. The value of the step size for a given
Simulink model can be either specified explicitly or it
is determined by the simulation engine such that the
bounds on approximation errors of integrator blocks
are within some specified threshold.
The simulation engine of Simulink is able to ex-
ecute a model under two different simulation modes,
namely fixed step solver and variable step solver. If a
fixed step solver is chosen then a simulation step oc-
curs every step size time units. If a variable step solver
is chosen then a simulation step occurs at the earliest
time instant when at least one block in the model ex-
ists such that the time elapsed since its last execution
is equal to its sample time. The logic underlying the
variable step solver mode follows:
Given the initial conditions of a Simulink sys-
tem: initial condition of stateful blocks, current sim-
ulation time: t = 0, end time: t
f
, ground sample
time: h, initial step size: l = h.k, where k is an in-
teger, block sorted sequence: σ = hb
1
;...;b
k
i, where
{b
i
| i ∈ 1 . . .k} is the set of k ∈ N blocks, the simula-
tion loop of a variable step is as follows:
• Loop until t ≤ t
f
– Evaluate output function of all blocks in the or-
der specified by σ;
– Evaluate update function of all stateful blocks;
– Detect zero crossing events (see (Bouissou and
Chapoutot, 2012));
– Update t = t + l; Determine the next simulation
step size l (an integer multiple of h);
In the fixed step solver mode, the simulation step size
is a constant and zero crossing cannot be detected.
Modeling Simulink Control Flow. In the previous
section, we have seen how an arbitrary Simulink sys-
tem can be expressed as a P-system. The enabling of
P-blocks in a P-system is determined by their sam-
ple time (i.e. by the availability of token in the place
enable). This means that in each simulation step
of the model, multiple P-blocks with the same sam-
ple time can become enabled. In CPN semantics,
the choice of executing a P-block is done in a non-
deterministic manner. However, in a Simulink simu-
lation, the blocks of a Simulink model that can pro-
duce their output at a simulation step (determined by
their sample times), are evaluated according to their
block sorted order.
Consider the P-system of the integral part of the PI
controller in the Fig 9. This system has four blocks,
namely one sum block (sum2), two gain blocks (gain-
h and gain-ki) and one unit delay block. For this sys-
tem, one of the block sorted order satisfying the de-
pendency graph of the Fig. 7, is the sequence: hunit
delay; gain-h; sum2; gain-kii. The block execution
order of P-blocks of a P-system is modeled by first
adding a trigger mechanism to each P-block and then
connecting the trigger mechanism of blocks accord-
ing to the block sorted order. We call the resulting
system a C-system.
The trigger mechanism is modeled on top of a
P-block by adding an input place trigger (labeled
trig), an output place acknowledge (labeled ack) and
a timed inhibitor transition (inhibitor arc that accounts
for the availability of token in place enable) called
skip. If the token in place trigger is available and
the token in place enable is unavailable, then the skip
transition is enabled due to the timed inhibitor arc.
Firing the skip transition does not progress time and
the execution of the block is skipped in the current
time step. If the skip transition is disabled (due to
an available token in place enable), then the block
transition (unit delay) fires at its enabling time and
produces a token in the place acknowledge, delayed
by the execution time of the block (see inscription
CF@1). In both cases, one token is produced in the
place acknowledge. In the Fig. 8, we give an example
of a P-block, extended with a trigger mechanism.
Next, we model the block execution order of a
system by introducing a new transition called the
glue transition between the acknowledge and trigger
places of successive blocks as they occur in the sorted
order. The construction is carried out in the following
way: For each block occurring in the block execu-
tion order, we add one glue transition that consumes
a token from the place acknowledge of the preceding
block and produces a token in the place trigger of this
block. In this way, the C-System describes a simula-
tion run of the system. In order to allow for more than
one run of a simulation at a rate specified by the step
size: (a) we add a transition labeled closure that con-
sumes a token from the place acknowledge belonging
to the last block in the sorted order and produces a to-
ken in the place trigger corresponding the first block
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
18
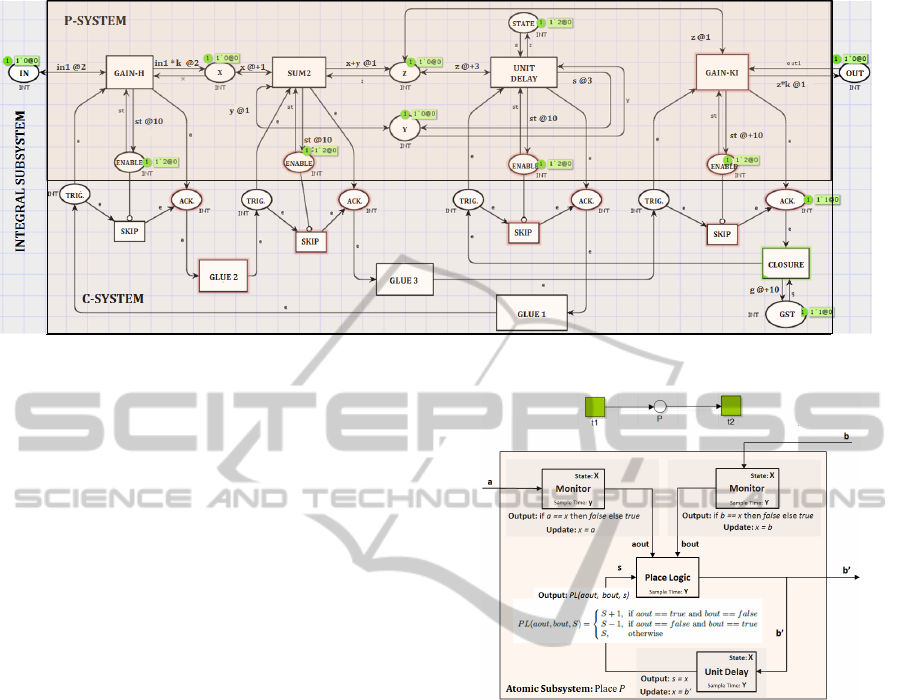
Figure 9: C-System: Integral Part (PI Controller).
in the sorted order, and (b) we initialize the place
acknowledge of the last block occurring in the block
sorted order with a token having a timestamp zero.
Furthermore, to this closure transition, we connect a
place called GST with bidirectional arcs and having
one token. On the incoming arc to the place GST , we
associate a delay corresponding the step size of the
simulation (multiple of ground sample time). As a re-
sult, a simulation run can only occur once every step
size time units. If the model has continuous blocks
then the step size must equal the ground sample time.
To simulate a variable step solver, the step size must
be equal to the least sample time of all blocks in the
system. In the Fig. 9, we describe the C-system of the
integral part of the PI controller having a step size of
10 time units.
4 EXPRESSING PETRI NETS
USING SIMULINK
In this section, we will express the semantics of a Petri
net as a Simulink system by modeling a place and a
transition as an atomic subsystem. The underlying
strategy is simple: The place subsystem keeps track
of the number of tokens and informs all successor
transitions about this value. When a transition sub-
system either consumes/produces a token, it indicates
the predecessor/successor place subsystem about the
occurrence of this event.
In the Fig. 10, we give an example of a Petri net
consisting of one place P, and two transitions t1 (pre-
transition) and t2 (post-transition), and show how the
place P of a Petri net can be modeled as an atomic
subsystem (place subsystem). The place subsystem
has two input signals (signals: a and b) and one out-
Figure 10: Modeling a Place in Simulink.
put signal (b
0
). The signals a and b are assumed to
be updated by the pre and post transitions t1 and t2,
respectively and the signals can either have a value
of 0 or 1. A change in the value of either of these
signals indicates that a transition has altered the num-
ber of tokens in the place. The output signal b
0
is an
input signal to transition t2 and has a data type inte-
ger, whose value represents the number of tokens in a
place subsystem. We call signals a and b as indication
signals and signal b
0
as a token signal.
The place subsystem has three stateful blocks (two
monitor blocks and a unit delay block) and one state-
less block (place logic). All the four blocks have the
same sample time equal to y time units. The input
monitor block receives an indication signal from a
pre-transition and the output monitor block receives
an indication signal from a post-transition. The two
monitor blocks compare the current value of their in-
put signal with the value recorded (i.e. state: x) from
the previous time step. If they are equal then the block
produces an output: false, otherwise it produces an
output true. The state of an unit delay block corre-
RelationshipbetweenSimulinkandPetriNets
19
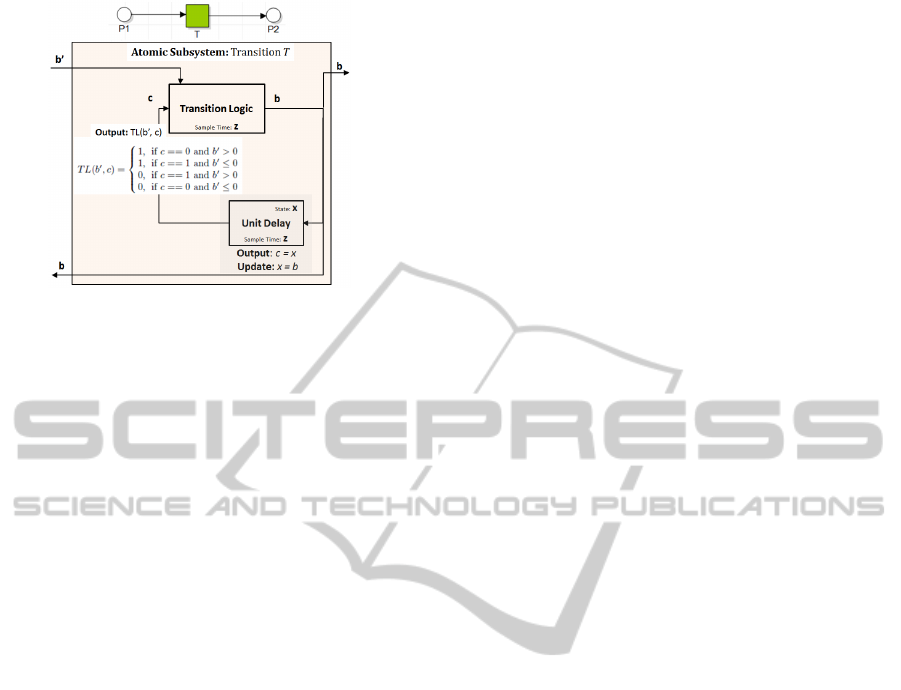
Figure 11: Modeling a Transition in Simulink.
sponds the number of tokens in the place in the cur-
rent time step. At every time step, the unit delay block
produces as its output, the current value of its state
variable. The initial state of the unit delay block cor-
responds the initial number of tokens in the place. The
place logic block defines a function to compute the
number of tokens in the current time step depending
on the output of monitor blocks aout and bout and the
output of the unit delay block S. If either aout or bout
is true, then one of the transitions must have changed
the number of tokens in the place and the value of
signal b
0
must be updated (i.e. either increased or de-
creased by one), otherwise b
0
remains unchanged.
If a place subsystem has more than one pre-
transition, then we add for each pre-transition, one
indication signal (input) and a corresponding input
monitor block whose output is connected to the place
logic block. The logic underlying the place logic
block is extended to handle an additional input con-
dition. If a place subsystem has more than one post-
transition, then we add for each post-transition, one
indication signal (input) and a corresponding output
monitor block whose output is connected to the place
logic block. Additionally, the token signal (output) is
split as an input for each post transition.
In the Fig. 11, we give an example of a Petri net
consisting of one transition T and two places p1 (pre-
place) and p2 (post-place), and show how transition T
of a Petri net can be modeled as an atomic subsystem
(transition subsystem). The transition subsystem has
one input signal b
0
(token signal) as an output from
pre-place p1 and one output signal b (indication sig-
nal) that is split as an input to both its pre-place p1
and post-place p2. The current value of signal b
0
is
representing the number of tokens in the transition’s
pre-place p1. The signal b has either value 0 or 1.
The transition subsystem has two blocks having
the same sample time of z time units. The unit delay
block has a state either 0 or 1 and in each time step,
produces as its output the state of the block in the pre-
vious time step. The output of the unit delay block
is connected to the transition logic block. The tran-
sition logic block defines a function that produces as
its output a value of 0 or 1 depending on the value of
the token signal b
0
(from a pre-place) and the output
signal of the unit delay block. If the value of signal
b
0
is greater than zero, then it means there are enough
tokens and transition T can fire. The firing of a transi-
tion is indicated by a change in the value of the indi-
cation signal b such that it has a value that is not equal
to the output of the unit delay block.
If a transition subsystem has more than one pre-
place, then we add for each pre-place: one token sig-
nal as an input to the transition logic block, and split
the indication signal (output) as an input to the pre-
place subsystem. The logic of the transition logic
block is extended to change its value if and only if all
of its inputs have a value greater than zero. If a transi-
tion subsystem has more than one post-place, then we
split for each post-place, the indication signal (output)
as an input to the post-place subsystem.
An equivalent model for a network of places and
transitions can be obtained by connecting place sub-
systems to transition subsystems over their shared sig-
nals. In such a network, the place subsystems must
produce their outputs faster than transition subsys-
tems. If more than one transition shares the same pre-
place then they must have different sample times.
5 ANALYSIS
In this section, we discuss how timed properties of
a C-system can be verified by model checking tech-
niques using a simple example. In the Fig. 12, we
present an atomic subsystem modeling Euler integra-
tion with two blocks: unit delay and sum, both having
a sample time equal to 10 time units and a simula-
tion step size of 15 time units. The execution time
of the unit delay block lies in the interval of [1,3]
time units and the execution time of the sum block
is 2 time units. For analysis purposes, we modify the
C-system with one additional transition complete and
one place init (initialized with a token) with no de-
lays between them. If we consider the notion of col-
ored tokens in a state, then analysis is possible only
for a finite future (partial state space). If we drop the
notion of color from a CPN, then we obtain a sub-
class of Discrete Timed Petri nets (DTPN) (Bera et al.,
2013; van Hee and Sidorova, 2013). So for analysis
of a C-system, we will ignore color and discard places
modeling signals and states. As the state space of a
DTPN is infinite because (a) time intervals on outgo-
ing arcs leads to an infinite choice of timestamps for
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
20
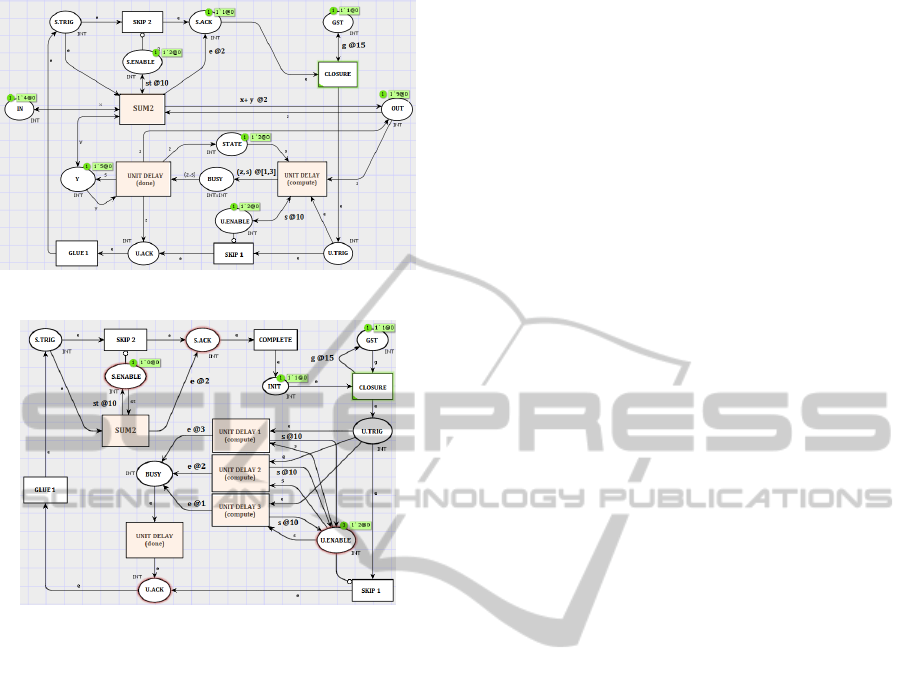
Figure 12: C-System: Euler Integration.
Figure 13: sDTPN of C-System.
newly produced tokens, and (b) time progression is
non-decreasing; model checking is not directly pos-
sible. For this a reduction method is proposed that
reduces the state space of a given DTPN into a finite
one. The reduction method progresses in two stages:
interval and time reduction.
The interval reduction step, replaces each time in-
terval on outgoing arcs of a DTPN with a set of fi-
nite values in the following way: For each time in-
terval specified along an outgoing arc, construct a
set containing its lower bound, upper bound and a
finite number of equidistant points between the two
bounds such that the points are separated from each
other by a so called grid distance. The grid distance
is the least common multiple of the denominators of
all non-zero elements of the set consisting of all to-
ken timestamps in the initial marking, and the lower
and the upper bounds of all time intervals expressed as
non-reducible elements of the set of rational numbers.
The resulting net is called an fDTPN (preserves sim-
ulation equivalence). An fDTPN can be transformed
into a DTPN with outgoing arcs having only single-
ton delays by making copies of transitions and asso-
ciating each of their outgoing arcs with a unique ele-
ment from the finite set of delays associated with that
arc. The resulting net is called an sDTPN (preserves
strong bisimulation).
In our example, the C-System (DTPN) has a grid
distance equal to 1, so the time interval [1,3] associ-
ated with the outgoing arc from the unit delay transi-
tion is replaced by the finite set S = {1,2,3} and the
delay of 2 time units on the outgoing arc from the sum
transition is replaced by the singleton set {2}. The
resulting system is an fDTPN. Next, the choice of de-
lays represented by the set S on an outgoing arc from
one unit delay transition is simulated by three copies
of the unit delay transition (same preset and postset),
each having a unique delay from the set S specified
along its outgoing arc. The resulting sDTPN is shown
in the Fig. 13. Note that transitions unit delay 1, unit
delay 2 and unit delay 3 simulate the behavior of the
transition unit delay (compute).
The time reduction step, transforms a given
sDTPN into a finite transition system (rDTPN) by re-
ducing each timed marking of an sDTPN (concrete
marking) into a so called abstract marking. An ab-
stract marking represents a class of concrete markings
by aggregating them based on relative distances be-
tween timestamp of tokens. An abstract marking of a
concrete marking is obtained by subtracting the times-
tamps of all tokens in the marking by its firing time.
This means the firing time of an abstract marking is
zero. It turns out that for any bounded sDTPN there
exists a finite transition system (of abstract markings),
called an rDTPN (preserves strong bisimulation).
As all places have at most one token in any
reachable marking, we identify a token in a place
by the name of that place and define a marking
as a function that assigns to each token identity, a
timestamp. A marking is represented as a vector of
timestamps corresponding the ordered set of places:
[S.ENABLE; U.ENABLE; U.TRIG; BUSY; U.ACK;
S.TRIG; S.ACK; INIT; GST]. In the Fig. 14, we
present the rDTPN of our sDTPN. Consider the reach-
able concrete markings [11,10,−,−,−,−,−,3,15]
and [26,25,−,−,−, −, −,18,30] from the initial
marking of the sDTPN in the Fig. 13. From
both these markings, the earliest enabled transi-
tion is the closure transition at times 15 and 30,
respectively. So their abstract marking is L14 :
[(−4),(−5),−,−,−,−, −, (−12),0].
Timed Analysis. To analyse a C-system, we must
be able to compute the upper and lower bounds on
the time required to reach a marking m from its initial
marking m
0
, i.e. timed reachability.
First, we show how to compute the time taken
to execute a sequence of transitions σ = ht
0
;...;t
n
i,
starting from the initial marking m
0
and leading to
marking m. Consider our sDTPN (see Fig. 13) and
its rDTPN (see Fig. 14). As all token timestamps are
RelationshipbetweenSimulinkandPetriNets
21
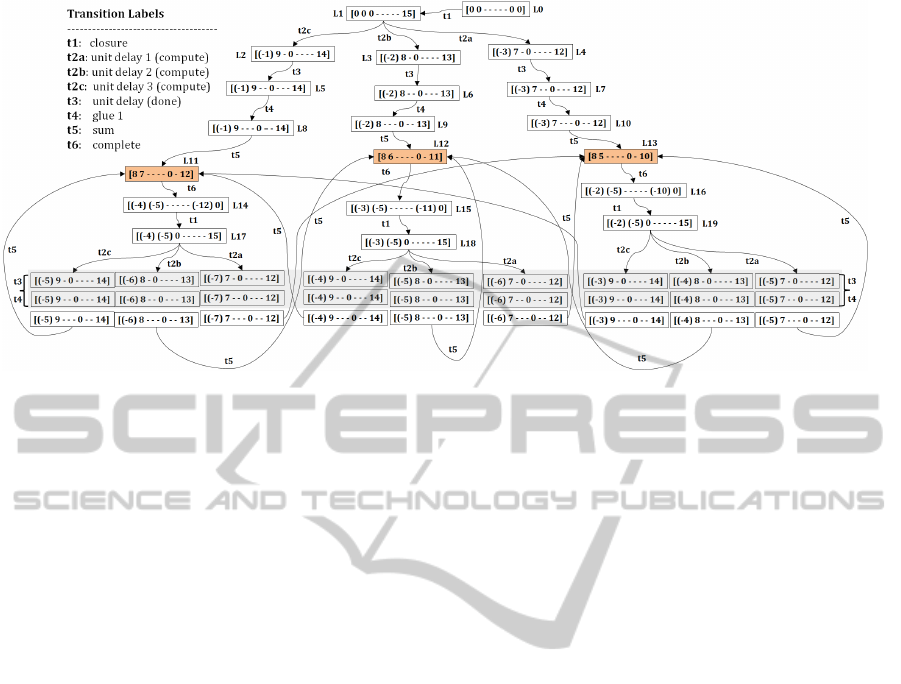
Figure 14: rDTPN.
zero in the initial marking m
0
, the initial marking l
0
of the rDTPN is an abstract marking of m
0
. Due to
bisimulation equivalence, the same sequence σ exists
from initial marking l
0
of the rDTPN, leading to a
marking l such that it is an abstract marking of m.
Then for each transition t ∈ σ, leading from an ab-
stract marking l
0
to the abstract marking l
00
, compute
the relative delay of marking l
00
in the following way:
Consider the marking l
0
as a concrete marking of the
sDTPN. From this marking, fire the enabled transi-
tion t, leading to a marking, say ˜m. The firing time of
marking ˜m (i.e. the earliest enabled transition) is the
relative delay of abstract marking l
00
. Note that the
relative delay of initial marking l
0
is always zero.
As an example, consider the marking L2 reach-
able from marking L1 over transition t2a. Consider
the marking L1 as a concrete marking of sDTPN. Fir-
ing transition t2a from this marking leads to marking
[0,10,−,1,−,−,−, −, 10] (in the sDTPN) with a fir-
ing time 1. So the relative delay of L2 is 1.
The time taken to execute σ is the sum of all rela-
tive delays of all abstract markings visited by the tran-
sitions of this sequence. As an example, consider the
marking L12 reachable from L0 by the sequence of
transitions ht1;t2b;t3;t4;t5i. All the abstract mark-
ings visited by this sequence, except for L3 and L12
have a non-zero relative delay of 2 time units each. So
the time taken to execute this sequence is 4 units.
Next, the lower and upper bounds on the time re-
quired to reach marking m from marking m
0
in the C-
system corresponds the minimum and maximum of
execution times of all possible transition sequences
starting from marking l
0
and leading to marking l, re-
spectively. A desirable property of a well-defined C-
system is formulated as: the upper bound of a run
of the block execution order must never be greater
than the simulation step size. As an example, con-
sider the set of shaded abstract markings called home
markings in our rDTPN. These markings correspond
the completion of a block execution order (token in
the place acknowledge of the sum block). So every
path starting from an initial marking or a home mark-
ing and leading back to a home marking represents
a run of the block execution order. For this, the up-
per and lower bounds of the time can be computed by
the techniques described so far. For our example, this
turns out to be in the interval of [3,5] time units. Note
that we have chosen a trivial example to present our
concepts. For a multirate system, the analysis and the
type of questions become more interesting.
An rDTPN can also be used to validate the timed
specification of a Simulink model. Note that the unit
delay and sum blocks have the same sample time.
From its rDTPN, we verify that in every path between
home markings, one of the unit delay and sum tran-
sition always occurs. If the simulation step size is 10
time units then there exist paths between home mark-
ings where the skip transition of the sum block occurs.
Other interesting features of Simulink like deci-
sional constructs (if-then-else and switch) and loop
constructs (for and while) can also be verified using
the above techniques. These constructs can be mod-
eled in a C-system as a non-deterministic choice be-
tween triggering mechanisms of blocks (see Fig. 16).
In many Simulink systems, messages may have to
be exchanged over one or more communication chan-
nels (supported by UDP/TCP send-receive blocks).
Such a message passing mechanism is easily mod-
eled as a Petri net, which can in turn be expressed
as a Simulink system as a network of place and tran-
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
22

Figure 15: Petri net model of a Communication Channel.
Figure 16: Modeling Choices in C-System.
sition subsystems. In the Fig. 15, we give an example
of a Petri net modeling a communication channel with
buffer size 5. For a C-system with a communication
channel, interesting properties like buffer utilization
and system performance in the presence of communi-
cation delays may be analyzed.
6 CONCLUSIONS
Simulink is a graphical way of modeling a set of dif-
ference and differential equations whose result is sim-
ulated by discretizing time. We have shown how the
simulation behavior of Simulink models can be ex-
pressed using the formalism of CPN. As models of
this formalism can be model checked, the safety and
performance properties of a Simulink model can be
guaranteed. We also showed how Petri nets can be
simulated in Simulink. So the two formalisms are for-
mally equivalent in their expressive power. However,
the modeling comfort is different. Petri nets are a bet-
ter choice for modeling discrete events like message
passing, whereas Simulink has more built-in facilities
for numerical approximation of differential equations,
than existing tools for Petri nets. Furthermore, the
formal study of DES is deeply rooted in the theory of
Petri nets and automata theory. So the specification
of both discrete and continuous parts of a Simulink
model using the same formalism, gives a better under-
standing of their behavior within the context of DES.
REFERENCES
Agrawal, A., Simon, G., and Karsai, G. (2004). Semantic
Translation of Simulink/Stateflow models to Hybrid
Automata using Graph Transformations. In Interna-
tional Workshop on Graph Transformation and Visual
Modeling Techniques, page 2004.
Alur, R. and Dill, D. L. (1994). A Theory of Timed Au-
tomata. Theoretical Computer Science, 126:183–235.
Bera, D., van Hee, K., and Sidorova, N. (2013). Dis-
crete Timed Petri nets. Computer Science Report 13-
03, Technische Universiteit Eindhoven, P.O. Box 513,
5600 MB Eindhoven, The Netherlands.
Bouissou, O. and Chapoutot, A. (2012). An Operational
Semantics for Simulink’s Simulation Engine. In Pro-
ceedings of the 13th ACM SIGPLAN/SIGBED Inter-
national Conference on Languages, Compilers, Tools
and Theory for Embedded Systems, LCTES ’12, pages
129–138, New York, NY, USA. ACM.
Bowden, F. D. (2000). A brief survey and synthesis of the
roles of time in Petri nets. Mathematical and Com-
puter Modelling, 31(10):55–68.
Cassandras, C. G. and Lafortune, S. (2006). Introduction to
Discrete Event Systems. Springer-Verlag New York,
Inc., Secaucus, NJ, USA.
Cassez, F. and Roux, O. H. (2006). Structural translation
from Time Petri Nets to Timed Automata. Journal of
Systems and Software, 79(10):1456–1468.
Denckla, B. and Mosterman, P. J. (2005). Formalizing
Causal Block Diagrams for Modeling a Class of Hy-
brid Dynamic Systems. In In IEEE CDC-ECC 05.
Hopcroft, J. E. and Ullman, J. D. (1979). Introduction
to Automata Theory, Languages, and Computation.
Addison-Wesley Publishing Company.
Jensen, K., Kristensen, L. M., and Wells, L. (2007).
Coloured Petri Nets and CPN Tools for Modelling and
Validation of Concurrent Systems. Int. J. Softw. Tools
Technol. Transf., 9(3):213–254.
Peterson, J. L. (1981). Petri Net Theory and the Modeling
of Systems. Prentice Hall PTR, Upper Saddle River,
NJ, USA.
Reisig, W. (1985). Petri nets: An Introduction. Springer-
Verlag New York, Inc.
Tiwari, A. (2002). Formal Semantics and Analysis Methods
for Simulink Stateflow Models. Technical Report, SRI
International.
Tripakis, S., Sofronis, C., Caspi, P., and Curic, A. (2005).
Translating Discrete-time Simulink to Lustre. ACM
Trans. Embed. Comput. Syst., 4(4):779–818.
van Hee, K. and Sidorova, N. (2013). The Right Timing:
Reflections on the Modeling and Analysis of Time.
In Proceedings of the 34th International Conference
on Application and Theory of Petri Nets and Concur-
rency, PETRI NETS’13, pages 1–20, Berlin, Heidel-
berg. Springer-Verlag.
Zhou, C. and Kumar, R. (2012). Semantic Translation of
Simulink Diagrams to Input/Output Extended Finite
Automata. Disc. Event Dyn. Sys., 22(2):223–247.
RelationshipbetweenSimulinkandPetriNets
23
