
A Compact Planar-patch Descriptor based on Color
Eduardo Fernández-Moral, Javier González-Jiménez and Vicente Arévalo
Mapir Group, Universidad de Málaga, E.T.S. Ingeniería de Informática-Telecomunicación, 29071, Málaga, Spain
Keywords:
Planar-patches Matching, Color Descriptor, RGBD Sensors, Plane-based Mapping, Place Recognition, Loop
Closure.
Abstract:
The representation of the world upon planar patches has proven to be simple, robust and useful for a variety
of robotic tasks, including SLAM, autonomous navigation, or scene recognition. In this work we investigate
how to incorporate color information into such representation to improve the matching of planar patches while
maintaining the model compactness, which is essential for real-time applications. We propose a descriptor
based on the dominant color of the patch, which is defined as the center of the biggest cluster in the patch
histogram. In the paper, different color spaces and methods for extracting the dominant color are analyzed.
We compare this descriptor with a recent proposal (saturated hue based histogram) and provide some con-
clusions on the trade-off between their descriptiveness and compactness. Finally, we present experimental
results showing how our color descriptor can be exploited to increase the efficiency of both: plane-based place
recognition and planar patch categorization.
1 INTRODUCTION
The combination of color and depth information pro-
vided by RGBD sensors (like Kinect) has demon-
strated to be useful for a wide range of problems as
3D modeling, object recognition or Simultaneous Lo-
calization and Mapping (SLAM), among others. One
of the main challenges when using RGBD sensors in
real-time robotics applications is how to effectively
process and represent the overwhelming flow of data
they deliver. A suitable way of accomplishing that
is by extracting a structure of planar patches from
it. This strategy has already been applied in prob-
lems such as visual odometry (Martinez-Carranza and
Calway, 2012), augmented reality (Chekhlov et al.,
2007), SLAM (Weingarten and Siegwart, 2006) or
place recognition (Fernández-Moral et al., 2013).
Planar patches, or planes for short, can be effi-
ciently computed from depth images (Poppinga et al.,
2008), (Holz and Behnke, 2013), and can be de-
scribed by very simple geometric features, like the
normal vector and the convex hull (see fig. 1). The
question that we pose here is how to represent the
radiometric information of the planar patches while
maintaining the compactness of the representation.
The answer to this question depends clearly on the
application. In this work, the context of our research
is that of matching planar patches for real-time place
recognition, what involves extensive search for patch
a) b)
Figure 1: Plane-based representation. a) RGB image of the
scene. b) Point cloud representation with the segmented
planar patches superimposed.
correspondences. Thus, selecting a color descriptor
involves the non-trivial issue of maintaining a trade-
off between distinctiveness, compactness, and com-
putational cost.
This problem of finding a color descriptor for pla-
nar patches was posed recently in (Pathak et al., 2012)
in the context of registering 3D scans, where the au-
thors adopted a hue based histogram to improve the
efficiency of registration. In this paper, in contrast,
we explore the idea of finding a descriptor based on
the dominant color of the plane. This insight, though
intuitive, has not been sufficiently studied in the liter-
ature. This problem has interest for the research com-
munity for several reasons: first, most planes in in-
door environments do have a dominant color; second,
the dominant color is more robust to the partial obser-
vation of planes than histograms; and finally, the lack
296
Fernández-Moral E., González-Jiménez J. and Arévalo V..
A Compact Planar-patch Descriptor based on Color.
DOI: 10.5220/0005015102960302
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 296-302
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

of distintiveness is largely compensated by the high
efficiency required by online back-end processes for
classification or place recognition which benefit from
a more compact, fast to compare descriptor.
In order to find such compact descriptor, we study
different color spaces and radiometric features, look-
ing for invariance to illumination, point of view and
partial occlusion (section 2). We conclude that a color
descriptor based on the patch dominant color in nor-
malized RGB space provides the best balance between
distinctiveness and compactness. In section 3, this de-
scriptor is compared with the hue based histogram re-
ported in (Pathak et al., 2012), which was previously
proposed for a similar problem, showing that though
the distinctiveness of both are simmilar, our alterna-
tive is advantageous in terms of computation time.
We provide experimental results for place recogni-
tion with plane-based maps using the color descriptor
proposed in this work. We demonstrate that the effi-
ciency of the previous geometry-based solution is sig-
nificantly improved (around 6 times faster) by using
color information. In all the experiments, we compare
our results with with the hue-based histogram.
2 SELECTING A COMPACT
COLOR DESCRIPTOR FOR
PLANAR PATCHES
In this section we address the problem of finding the
simplest color descriptor for a planar patch focused on
the problem of patch matching. This descriptor must
be highly invariant to viewpoint, lighting conditions
and partial occlusion, and also, it must be efficiently
calculated. Note that the utility of this descriptor is
not to unequivocally identify planar patches, but to
prune the search space by adding a very compact ra-
diometric information to the geometric features of the
planar model.
In the context of matching planar patches, a com-
mon solution is that of maximizing the photoconsis-
tency between them (Argiles et al., 2011). The main
limitation of this strategy, which comes as a con-
sequence of the lack of compactness and invariance
of the descriptor, is that maximizing the photocon-
sistency is prohibitively expensive for many applica-
tions, especially when there is not a good initial es-
timation of the registration (e.g. loop closure detec-
tion). Closer to our work are those that describe the
patch radiometric information through its histogram
(Hafner et al., 1995), (Swain and Ballard, 1991). In
this line, (Pathak et al., 2012) posed recently the prob-
lem that we address in this paper: showing how color
information can be exploited to increase the efficiency
of 3D scan registration. A well illuminated scene is
assumed in that work, where the authors adopt a hue
based histogram with 2 extra bins to keep intensity
saturated values (black and white), and test different
measures for histogram distance. However, they do
not take into account the fact that many planar patches
have a single color, so that the histogram contains
redundant information. Also, this descriptor is not
robust to partial occlusion, which is rather common
when doing exploration and mapping.
In this paper, we propose to describe the patch
with its dominant color. A similar strategy is used
in video compression (Manjunath et al., 2001) to de-
fine blobs having the same color. In this way the de-
scriptor storage and the computation of distances are
reduced to a minimum. This is important in a number
of problems where many match combinations have
to be checked in real-time. In order to select such
a descriptor we need to address some issues: first,
the selection of the color space which offers the best
suitability to obtain an invariant and distinctive domi-
nant color (subsection 2.1); second, to define the way
this dominant color is extracted (subsection 2.2); and
third, to adapt the descriptor for cases where the dom-
inant color is not reliable enough (subsection 2.3).
2.1 Selection of the Color Space
In order to obtain a distinctive dominant color, the his-
tograms of the patches must be invariant to illumina-
tion conditions, shading and viewpoint. These charac-
teristics are highly dependent on the color space used
to represent the radiometric information, as we show
in the analysis below. Note also that the fact of se-
lecting the dominant color makes the descriptor in-
herently robust to partial occlusion when the physical
plane has a clearly defined dominant color, which is
the most common situation. If this is not the case,
e.g. a textured plane with different colors, the domi-
nant color is not a good descriptor and it should not
be used for matching.
Different color spaces have been studied in the
context of object recognition in (Gevers and Smeul-
ders, 1999). This work concludes that normal-
ized RGB (rgb), saturation and hue (HS), and the
color models c
1
c
2
c
3
and l
1
l
2
l
3
are highly invariant to
changes in viewing direction and illumination (see ta-
ble 1 for the formulation of these color spaces). Be-
low, we analyze these color spaces for a dataset con-
taining 1000 observations of plane surfaces from dif-
ferent scenarios, spanning diverse viewing conditions
(changing viewpoint and illumination, partial occlu-
sion, etc.). Below we study some relevant properties
ACompactPlanar-patchDescriptorbasedonColor
297
Table 1: Formulation of several color spaces from the RGB
data.
Color space Formulation
r(R, G,B) =
R
R+G+B
rgb g(R,G,B) =
G
R+G+B
b(R,G,B) =
B
R+G+B
HS H(R,G,B) = arctan
√
3(G−B)
(R−G)+(R−B)
S(R,G,B) = 1 −
min(R,G,B)
R+G+B
c
1
(R,G,B) = arctan
R
max(G,B)
c
1
c
2
c
3
c
2
(R,G,B) = arctan
G
max(R,B)
c
3
(R,G,B) = arctan
B
max(R,G)
l
1
(R,G,B) =
(R−G)
2
(R−G)
2
+(R−B)
2
+(G−B)
2
l
1
l
2
l
3
l
2
(R,G,B) =
(R−B)
2
(R−G)
2
+(R−B)
2
+(G−B)
2
l
3
(R,G,B) =
(G−B)
2
(R−G)
2
+(R−B)
2
+(G−B)
2
of such color spaces:
2.1.1 Histogram Invariance
To extract a dominant color descriptor invariant to
viewpoint (including the effects of partial occlusion
and shades), the histograms main peak must be sta-
ble along different views of the same plane. To mea-
sure the histogram stability in a given color space, we
check the similarity of all histograms corresponding
to the same plane by means of a chi-squared (χ
2
) dis-
tance measure (Pele and Werman, 2010). This mea-
sure is used to compute the histogram distances of all
pairs of views of the same plane. Then, the mean dis-
tance of all analyzed pairs is averaged for all tested
planes to obtain a global measure of the color space
stability, see table 2.
2.1.2 Histogram Dispersion
The histograms of planes with a well defined domi-
nant color are generally unimodal and with little dis-
persion. However, such characteristic does not ap-
ply to all the planes in the environment, and also, it
varies depending on the color space. To accept that
a plane has a dominant color we make use of a sim-
ple heuristics which requires that at least 50% of the
patch pixels are contained in a bandwidth of ±5% of
the histogram range, centered at such dominant color.
Thus, we define the concentration rate C as the num-
ber of planes that fulfills this condition in all color
components between the total of planes. We have
found that the above condition is fulfilled in 97.5%
for planes represented with rgb and 92.8% for planes
represented with c
1
c
2
c
3
, while the other color spaces
Table 2: Suitability of different color spaces to represent
planar patches according to: histogram stability, histogram
dispersion and computation time. The values shown corre-
spond to the average of 100 different planes, with 10 obser-
vations each. For all properties, less means better.
rgb c
1
c
2
c
3
l
1
l
2
l
3
HS
Stability χ
2
0.10 0.11 0.13 0.14
Disp (1 −C) 0.03 0.07 0.74 0.77
C. time (µs) 10.7 104.9 23.0 11.3
present much lower rates. Table 2 shows the disper-
sion rate in this experiment, defined as (1 −C).
2.1.3 Computation Time
Another important criterion to consider is the com-
putation time required to transform the original color
space to the target one. This is less critical because
this cost is small in comparison with the whole pro-
cess of segmenting the planes, whichever the chosen
color space is. The average of this time for this dataset
is also indicated in table 2.
Taking into account the criteria studied above, we
notice that rgb is the one with the best properties, and
therefore, it is the one adopted in the rest of this paper.
2.2 Computing the Dominant Color of a
Plane
There exist several ways to define the dominant color
for a planar patch. In this work we have tested the
mode of the histograms, and the centroid of the largest
cluster extracted with two variants of the mean shift
algorithm: with fixed (FMS) and variable bandwidth
(VMS), respectively. Mean shift has been broadly
used for color segmentation (Comaniciu and Meer,
1997). Though it has limitations for real-time appli-
cations due to its computational cost, in our case the
cost of the mean shift is affordable since most his-
tograms present unimodal distributions and we only
extract one cluster, so that it converges in very few
iterations.
We compare the distinctiveness of the dominant
color obtained with the above techniques using a bi-
nary classifier based on the color difference of two
patches, expressed as |c
i
−c
j
|. Thus, when this dif-
ference is larger than a threshold the patches are con-
sidered to belong to different physical planes. This
classifier is tested, for a range of thresholds, with the
previous dataset in which we know beforehand which
observation corresponds to each plane (i.e. the ground
truth).
From this experiment we obtain the distinctive-
ness of this classifier in terms of its sensitivity (ratio of
actual positives which are correctly identified) and the
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
298

0.4 0.5 0.6 0.7 0.8 0.9 1
0.6
0.7
0.8
0.9
1
Specificity
Sensitivity
ROC color classifier
VMS
FMS
Mode
Figure 2: ROC curves (sensitivity vs. specificity) of the
color constraints as binary classifiers.
specificity (ratio of negatives which are correctly re-
jected) for the different techniques to obtain the dom-
inant color. These results are depicted as ROC (Re-
ceiver Operating Characteristic) curves in fig. 2. Ev-
ery point of each curve represents a different thresh-
old for the classifier, thus, more restrictive thresholds
result in higher sensitivity and lower specificity. Note
that the nearer the curve is to the optimum point (1,1)
the better the classifier is. From this test we conclude
that VMS provides the most distinctive dominant color
since both, sensitivity and specificity, are higher than
for the mode and FMS for any threshold.
2.3 Dealing with Non-distinctive
Dominant Color
An important issue when describing patches with
their dominant color is dealing with those cases where
this description is not applicable. For example, we
can not use the dominant color as descriptor for planes
without a prevalent color (e.g. a checkerboard). To
take this situation into account we add a boolean to
our color descriptor to specify whether the distribu-
tion of the plane histogram in rgb has a low disper-
sion, as explained in the previous subsection.
Another case of interest is that of recognizing very
distinct intensity levels (e.g. black and white planes
have the same values r = g = b = 0.33). Despite this
problem depends on illumination, we reckon that a
minimum illumination is required to distinguish dif-
ferent colors, and such minimum can be sufficient to
distinguish gray levels far apart when enough illumi-
nation is available. For this case, we propose to in-
clude in the descriptor the average intensity (Av.Int),
which is calculated as the average (R + G + B/3) of
the inliers supporting the dominant color given by the
previous mean shift segmentation. Thus, this part of
the descriptor can be used for well illuminated scenes
(what is common to many environments).
To sum up, the resulting descriptor contains 4 ele-
0.4 0.5 0.6 0.7 0.8 0.9 1
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Specificity
Sensitivity
ROC color constraints
Normalized rgb
Dominant Brgb
Hue Histogram
Figure 3: ROC curves (sensitivity vs. specificity) of differ-
ent color descriptors: dominant rgb, dominant rgb including
intensity and hue histogram.
ments that are stored in a word of 4 bytes: 2 bytes for
normalized color r and g (note that b depends on these
two as r +g+b = 1), 1 byte for the plane intensity and
1 bit for to specify the existence of a dominant color.
3 DOMINANT COLOR
DESCRIPTOR vs. HUE
HISTOGRAM
In this section we evaluate the distinctiveness of the
proposed dominant color based descriptor and com-
pare it with the normalized, saturated hue histogram
proposed in (Pathak et al., 2012). To compare both
in the same conditions such evaluation is performed
in well illuminated scenes, and so, the intensity part
of our descriptor is also employed. Following the
work of (Pathak et al., 2012), we implement the paper
method with 74 bins, 72 bins for hue values and two
more bins for saturated black and white, and compare
the patch histograms h
i
with the Bhattacharyya dis-
tance (Bhattacharyya, 1946):
B(h
1
,h
2
) =
s
1 −
N
∑
k=1
p
h
1
[k] ·h
2
[k] (1)
The sensitivity and specificity of a binary classifier
based on the compared descriptors are evaluated using
different thresholds as we did in the previous section
(see fig. 3). As expected, we observe that the pro-
posed descriptor is significantly more distinctive than
the rgb dominant color, since the latter lacks informa-
tion about the reliability of the dominant color, and
also it cannot distinguish between different grayscale
levels.
By comparing our descriptor with the hue based
histogram we observe that their distinctiveness are
similar despite the richer information of the latter (see
ACompactPlanar-patchDescriptorbasedonColor
299
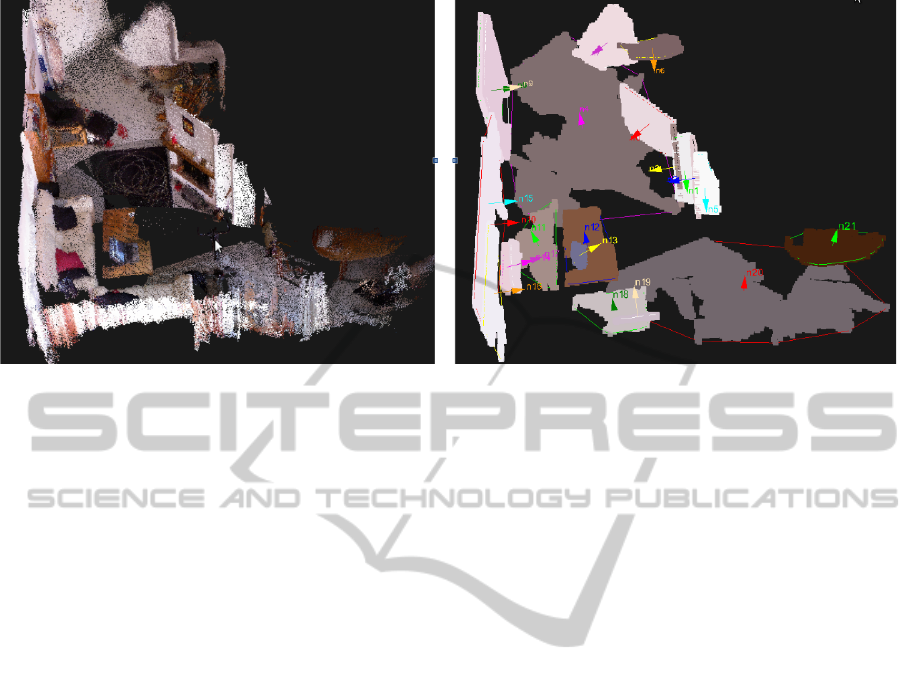
Figure 4: Plane based representation of a living room. The colored planes at the right have been extracted from the point
cloud at the left.
fig. 3). The reason for this is that most planes have a
prevalent color in our test environments. The fact that
the sensitivity of the hue histogram is slightly lower is
explained because the histogram is less robust to par-
tial observation of planes. Contrarily, this descriptor
should perform better for textured surfaces and when
the patches present no occlusion, however, such cases
are rare in the home and office environments we are
working in, where our dominant color descriptor is
more suitable.
Besides the distinctiveness of the descriptor, the
compactness and the computational cost of measur-
ing distances are two relevant issues in this work. The
color descriptor we propose is the most compact rep-
resentation for a number of applications, including
patch matching or visualization (Pathak et al., 2012).
Regarding the computation of distances between de-
scriptors, in our case it is reduced to a subtraction in
each element, while the computing distance between
histograms (e.g. with the Bhattacharyya distance) re-
quires more computation. This is an important advan-
tage when we require to perform this operation inten-
sively in real time as we will see in next section.
4 EXPERIMENTAL RESULTS
The experimental validation of the proposed color de-
scriptor is presented next for two different problems.
First we evaluate the improvement for recognizing
previous visited places based on a planar description
of the scene. Second, we analyze the advantages for
planar patch classification using a random forest.
4.1 Improving Place Recognition
In this experiment, the proposed descriptor is
tested in a plane-based place recognition applica-
tion (Fernández-Moral et al., 2013) (available in
http://www.mrpt.org/pbmap). This application works
by matching sets of neighboring planar patches based
on their geometric attributes and their relations. Here,
we incorporate our dominant color based descriptor
to speed up the search process. Figure 4 shows an ex-
ample of such planar representation where each patch
is colored with its dominant color. We demonstrate
that the little expense of including the color descrip-
tor improves significantly the matching of planes, and
so, the place recognition performance.
In this application the planar patches are ef-
ficiently extracted at frame rate from RGBD im-
ages using a region growing technique (Holz and
Behnke, 2013). Such planes are organized in a graph
which stores the connection between close-by planar
patches, so that a subgraph of connected nodes rep-
resents a local neighborhood of planes. Place recog-
nition is addressed as a problem of matching neigh-
borhoods of planes, thus, the poor distinctive infor-
mation of a single plane is compensated by the strong
relations between neighbor planes.
In order to match two sets of neighbor patches,
an interpretation tree is utilized to apply geomet-
ric restrictions in the form of unary and binary con-
straints (Grimson, 1990). These constraints make use
of thresholds that have been determined experimen-
tally from training carried out in diverse indoor sce-
narios: office and home places. An important ad-
vantage of this approach is its flexibility to recognize
places when the planes are partially observed or miss-
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
300

0.3 0.4 0.5 0.6 0.7 0.8 0.9
0.6
0.7
0.8
0.9
1
Specificity
Sensitivity
ROC unary constraints
Area
Elong
Color
Figure 5: Comparison of the different unary constraints by
their ROC curves (sensitivity vs. specificity).
ing. Yet, a planar-based scene representation has the
benefit of being more robust to changes of viewpoint
and tolerates reasonably well changes in the scene.
This solution performs intensive computation to
search for previous places (loop closure) every time
the map is updated at 30 Hz. By adding the color
descriptor to this geometric description we can prune
branches of the interpretation tree to find the solution
more efficiently. Thus, the proposed color descrip-
tor introduces a new unary constraint to avoid the
matching of planes with different color. To arrange
the order in which the new restriction will be eval-
uated, we compare its distinctiveness with the other
two unary restrictions: area and elongation of the pla-
nar patches. Similarly to the previous section, we es-
timate the ROC curves showing the balance between
sensitivity and specificity of the unary restrictions for
a range of thresholds, see fig. 5. From this graph we
can see that the color is the most discriminative fea-
ture and, since all unary restrictions require similar
computation, we arrange their application order con-
sequently: color, area and elongation.
To illustrate the performance improvement, we
have carried out an experiment where we measure the
time required for searching a place with and with-
out the color descriptor. Figure 6 shows the aver-
age time of such search with respect to the number
of planes being evaluated. We observe that perform-
ing the search using the proposed color descriptor is
around 6 times faster. Such rate varies from 2 to 10
depending on the radiometric characteristics of the
planar surfaces of the environment. This presents
a significant increase of efficiency over the previous
pure-geometric solution.
5 CONCLUSIONS
This paper presents a simple, highly compact color
4 5 6 7 8 9 10
0
2
4
6
8
x 10
4
Num planes to match
Num restrictions checked
Geometry
Geometry & Color
Figure 6: Performance of the place recognition process
using both: only geometry and color and geometry in
PbMaps.
descriptor for planar patches which can be used to im-
prove the performance of matching and classification
algorithms based on planar models. In essence, we
propose to approximate the patch color by the most
representative color in it in normalized rgb space.
Though this idea may look simplistic and naive, we
notice that it has not been employed before, probably
due to the difficulty of finding an invariant descriptor
through such little information, and only tuned his-
tograms have been employed in similar problems. To
address the problem of finding an invariant color at-
tribute we have evaluated different color spaces and
different dominant color selection strategies, and have
included some extra information about its reliability
and its saturation. The proposed descriptor contains
the dominant rgb color of the plane, extracted us-
ing a mean-shift algorithm, the average intensity of
this dominant color and a boolean to indicate whether
such dominant color is representative enough. We
have verified in common office and home environ-
ments that this descriptor is as distinctive as the hue
based histogram proposed previously, while it is more
compact and faster to compare. We demonstrate that
the performance of a place recognition application
based on matching planar patches is significantly im-
proved (about 6 times speed-up) by using the compact
color descriptor proposed here. This descriptor has
also been tested to improve planar patch classification
by adding such information to a compact geometric
descriptor, showing that the recognition rate improves
at the expense of a small increase in computation.
REFERENCES
Argiles, A., Civera, J., and Montesano, L. (2011). Dense
multi-planar scene estimation from a sparse set of im-
ages. In Intelligent Robots and Systems (IROS), 2011
IEEE/RSJ International Conference on, pages 4448–
4454.
ACompactPlanar-patchDescriptorbasedonColor
301

Bhattacharyya, A. (1946). On a measure of divergence be-
tween two multinomial populations. Sankhy
¯
a: The In-
dian Journal of Statistics (1933-1960), 7(4):401–406.
Chekhlov, D., Gee, A., Calway, A., and Mayol-Cuevas,
W. (2007). Ninja on a plane: Automatic discovery
of physical planes for augmented reality using visual
slam. In Proceedings of the 2007 6th IEEE and ACM
International Symposium on Mixed and Augmented
Reality, pages 1–4. IEEE Computer Society.
Comaniciu, D. and Meer, P. (1997). Robust analysis of fea-
ture spaces: color image segmentation. In Computer
Vision and Pattern Recognition, 1997. Proceedings.,
1997 IEEE Computer Society Conference on, pages
750 –755.
Fernández-Moral, E., Mayol-Cuevas, W., Arévalo, V., and
González-Jiménez, J. (2013). Fast place recognition
with plane-based maps. In Robotics and Automation
(ICRA), in 2013 IEEE International Conference on.
IEEE.
Gevers, T. and Smeulders, W. (1999). Color based object
recognition. Pattern recognition, 32(3):453–464.
Grimson, W. E. L. (1990). Object Recognition by Computer
- The role of Geometric Constraints. MIT Press, Cam-
bridge, MA.
Hafner, J., Sawhney, H., Equitz, W., Flickner, M., and
Niblack, W. (1995). Efficient color histogram in-
dexing for quadratic form distance functions. Pat-
tern Analysis and Machine Intelligence, IEEE Trans-
actions on, 17(7):729 –736.
Holz, D. and Behnke, S. (2013). Fast range image seg-
mentation and smoothing using approximate surface
reconstruction and region growing. In Intelligent Au-
tonomous Systems 12, pages 61–73. Springer.
Manjunath, B., Ohm, J.-R., Vasudevan, V., and Yamada, A.
(2001). Color and texture descriptors. Circuits and
Systems for Video Technology, IEEE Transactions on,
11(6):703 –715.
Martinez-Carranza, J. and Calway, A. (2012). Efficient vi-
sual odometry using a structure-driven temporal map.
In Robotics and Automation (ICRA), 2012 IEEE Inter-
national Conference on, pages 5210–5215.
Pathak, K., Vaskevicius, N., Bungiu, F., and Birk, A.
(2012). Utilizing color information in 3d scan-
registration using planar-patches matching. In Multi-
sensor Fusion and Integration for Intelligent Systems
(MFI), 2012 IEEE Conference on, pages 371–376.
Pele, O. and Werman, M. (2010). The quadratic-chi
histogram distance family. Computer Vision–ECCV
2010, pages 749–762.
Poppinga, J., Vaskevicius, N., Birk, A., and Pathak, K.
(2008). Fast plane detection and polygonalization in
noisy 3d range images. In Intelligent Robots and Sys-
tems, 2008. IROS 2008. IEEE/RSJ International Con-
ference on, pages 3378–3383. IEEE.
Swain, M. J. and Ballard, D. H. (1991). Color indexing.
International journal of computer vision, 7(1):11–32.
Weingarten, J. and Siegwart, R. (2006). 3d slam using pla-
nar segments. In Intelligent Robots and Systems, 2006
IEEE/RSJ International Conference on, pages 3062–
3067.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
302
