
Multi-loop Control Using Gershgorin and Ostrowski Bands
C. Le Brun
1
, E. Godoy
1
, D. Beauvois
1
, N. Doncque
2
and R. Noguera
3
1
Automatic Control Department, Supelec, Gif-sur-Yvette, France
2
Systems Division, SNECMA (SAFRAN), Villaroche, France
3
DynFluid Laboratory, Arts & Métiers ParisTech, Paris, France
Keywords: Multivariable Control, Decentralized Control, PID Tuning, Nyquist-Array Methods, Gershgorin Bands,
Ostrowski Bands, Diagonal Dominance.
Abstract: The goal of this paper is to develop a new method of decentralized control tuning. This method is based on
Nyquist-Arrays and independently designs monovariable controllers for each loop of the plant while
ensuring the robust stability of the multivariable system. It works on the optimization of a frequency
criterion using the controller’s design parameters. PID controllers have been chosen in this study because of
their good performances for most applications. Finally, the proposed method allows to achieve good
performances and the stability is ensured thanks to the analysis of Gershgorin and Ostrowski bands.
1 INTRODUCTION
The design of the control of a multivariable process
can be achieved with two strategies. The centralized
strategy consists in designing one full MIMO
(Multiple Inputs Multiple Outputs) controller for the
whole system. The different techniques of this
strategy (Skogestad and Postlethwaite, 1996),
including state-feedback, model predictive control,
H-infinity loop-shaping… are usually efficient and
achieve good performances. However, these
methods need a precise enough model, and the
obtained controllers are usually of high-order. The
decentralized strategy consists in dividing the
MIMO process into a combination of several SISO
(Single Input Single Output) processes and to design
mono-loop controllers in order to control the MIMO
process (Albertos and Sala, 2004).
Compared to the centralized strategy, the
decentralized one provides flexibility and needs
fewer parameters to tune, while it is easier to
implement and increases the loop failure tolerance of
closed loop systems. Because of these benefits,
decentralized controllers have been widely used and
different types of methods have been developed as
described in (Huang et al., 2003).
Independent design method (Skogestad and
Morari, 1989) is chosen in this paper, which means
that each loop is designed independently from the
others. The Nyquist array techniques have shown
themselves to be well-suited for practical design of
controllers for multivariable interacting processes
(Garcia, Karimi and Longchamp, 2005), (Chen and
Seborg, 2002).
This paper proposes a new method based on
Nyquist-Arrays. The goal is to design SISO
controllers for any multivariable process (unstable
poles, unstable zeros, dead time) with medium
interactions. Two alternatives are under discussion,
the first one uses Gershgorin bands whereas the
second one uses Ostrowski bands. The study is
limited to PID controllers but it can easily be
generalized.
This paper is organized as follows: Section 2
surveys theoretical preliminaries about the Nyquist-
array methods. Section 3 presents the design of the
control laws and Section 4 exposes simulation
results that demonstrate the efficiency of this
method. Conclusions are presented in Section 5.
2 NYQUIST-ARRAY METHODS
The proposed method is based on the Nyquist-array
methods (Leigh, 1982), (Rosenbrock, 1969), in
which the design of the controller is divided into two
steps. The first one consists in reducing the
interactions in the system so that each control loop
635
Le Brun C., Godoy E., Beauvois D., Doncque N. and Noguera R..
Multi-loop Control Using Gershgorin and Ostrowski Bands.
DOI: 10.5220/0005017406350642
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 635-642
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

can be closed separately and independently from the
remaining loops. In the second step, controllers of
the different loops are designed.
This paper focuses on the design of the
controllers but a short summary of the general
methods is recalled.
2.1 Diagonal Dominance
The design of the control laws often requires the
diagonal dominance of the system. A p×p matrix Z
is called row (respectively column) diagonally
dominant if it satisfies (1) (respectively (2)):
pi
p
ijj
ijiii
ZZRrZ ,...,1,)(
≠,1
(1)
pi
p
ijj
jiiii
ZZRcZ ,...,1,)(
≠,1
(2)
If the frequency response matrix of a MIMO
system is row (respectively column) diagonal
dominant for the whole frequency domain, it means
that each output is mainly determined by its
corresponding input (respectively each input
determines mainly its corresponding output).
Furthermore, it is clear that a higher degree of
diagonal dominance yields a smaller difference
between the MIMO performance and the
performance of the SISO designs.
2.2 Principe of Nyquist-Array Methods
Nyquist-array methods are divided into two classes:
the Direct Nyquist-Array (DNA) and the Inverse
Nyquist-Array (INA). Both methods have identical
design objectives and the method proposed here can
be applied both with DNA and INA.
Consider a MIMO plant G. The open-loop
transfer matrix Q described in (3) is used in DNA
whereas the inverse of the open-loop is considered
in INA. The structure of the control laws is
described by (4).
)()()( sKsGsQ
(3)
)()()( sKsKKsK
cba
(4)
K
a
is a constant matrix that permutes rows or
columns to reorder the outputs or inputs. It can be
used to avoid unstable off-diagonal elements. K
b
is
used to achieve diagonal dominance. An overview
of the methods to find these matrices is found in
(Vaes, 2005) and (Maciejowski, 1989). K
c
is a
diagonal matrix composed of separate SISO
controllers for each loop.
In DNA, the diagonal matrix K
c
post-multiplies
the plant G
d
as in (5). The effect of each element is
to multiply each column of G
d
by the same transfer
function. Hence, column dominance of G
d
is
preserved.
However, in the INA, K
c
-1
pre-multiplies the
inverse of the plant and row dominance of the
inverse is conserved.
)()()( sKsGsQ
cd
(5)
)()()( sKKsGsG
bad
(6)
This paper focuses on the design of the diagonal
controller K
c
only. Therefore, G
d
is considered as
being column diagonally dominant when working
with DNA and G
d
-1
is considered as being row
diagonally dominant when working with INA in the
following.
2.2.1 Direct Nyquist-Array Method
Closed-loop stability of a SISO system is obviously
analyzed with the Nyquist stability theorem. The
Generalized Nyquist theorem extends it to MIMO
systems (Macfarlane and Postlethwaite, 1977):
Considering an open loop transfer matrix Q
presenting n
pol
unstable poles, defining the
characteristic loci as the images of the Nyquist
contour by the eigenvalues of Q, the Generalized
Nyquist theorem states that the closed loop is stable
if and only if the sum of the anticlockwise
encirclements around the critical point of the
characteristic loci of the open-loop transfer equals
n
pol
.
The characteristic loci can be approached by the
diagonal elements of Q thanks to Gershgorin’s
theorem:
The eigenvalues of a complex p×p matrix Z lie in
the union of the p circles, each with center Z
ii
and
radius Rr or Rc defined in (1) and (2). When this
theorem is applied to the gain matrix Q(jω), a circle
is obtained around each diagonal element of the loop
gain at each frequency ω. The bands obtained by
taking these circles together over the frequency
domain are called Gershgorin bands.
Using Gershgorin's theorem, it can be claimed
that the eigenvalues of a gain matrix Q over all
frequencies are trapped into these Gershgorin’s
bands. Based on the generalized Nyquist theorem, it
can be concluded that if all Gershgorin bands
exclude the critical point, then closed-loop stability
can be assessed by counting the number of
encirclements of the critical point by the Gershgorin
bands.
The open-loop matrix in (5) can be written:
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
636

pppp
pp
KGKG
KGKG
Q
11
1111
(7)
The width of the i
th
column Gershgorin band is:
p
ikk
ikii
jKjGjRc
,1
)()()(
(8)
It is clear that the width of this band only
depends on the system and on the i
th
controller K
i
.
The stability of the i
th
loop can thus be ensured
independently of the other controllers.
2.2.2 Inverse Nyquist-Array Method
The principle of the INA (Bell, Cook, and Munro,
1982) method is different. For notational
convenience, the inverse of a matrix H is noted as Ĥ.
Let us consider Q an open-loop transfer matrix
composed of a plant and its SISO controllers as
described in (5) and H the closed-loop transfer
matrix. We denote l
i
the open-loop transfer function
between e
i
and y
i
with all the other loops are closed
as shown in Figure 1 for a TITO (Two Inputs Two
Outputs) process.
Figure 1: TITO process (the second loop is closed and the
first one is being closed).
Considering this open-loop transfer function l
i
takes into account the stability of the whole system.
l
i
is not a priori known but ܳ
gives a good
approximation of the inverse of l
i
thanks to
Ostrowski’s theorem: Considering a complex p×p
matrix Z diagonally row dominant, then:
∑∑
≠1≠1
max1
p
jk,k
jjjk
ij
p
ik,k
ikiiii
ZZZZ
ˆ
Z
(9)
Applying this theorem to the i
th
row of Ĥ that is
supposed row diagonally dominant, we obtain after
calculation:
)())(
ˆ
()(1)(
ˆ
jjQRrjljQ
iiiii
(10)
))(
ˆ
))(
ˆ
(()( max
jQjQRrj
jjj
ij
i
(11)
Consequently, 1/l
i
(jω) is contained within a
circle centered in
ܳ
ሺ݆߱ሻ. We call this an Ostrowski
circle and the union of all these circles an Ostrowski
band.
The terms Φ
i
physically represent the maximal
relative couplings in the other loops. Since ܳ
is
assumed to be row diagonally dominant, Φ
i
is
smaller than 1. The i
th
Ostrowski band is thus
contained within the i
th
Gershgorin band of the
inverse of the open-loop transfer matrix. Moreover,
although each term of Φ
i
depends on the controllers
of the other loops, Φ
i
is independent of these. It can
be concluded that the width of row Ostrowski bands
only depends on the plant and on the i
th
controller.
The stability of loop i can thus be ensured
independently of the other loops’ controllers.
As in DNA with Gershgorin bands, Ostrowski
bands can be used to characterize the stability of the
system in INA. The inverse Nyquist criterion (Bell,
Cook, and Munro, 1982) is then used: A feedback
loop with n
zeros
unstable zeros in the loop gain Q is
stable if and only if the sum of the anticlockwise
encirclements around the critical point of the inverse
Nyquist locus of Q equals n
zeros
.
3 CONTROL LAWS DESIGN
The goal is to define a method to design a
decentralized control for MIMO systems. There is
no restriction about the structure of the controller.
PID controllers have been chosen in this study
because they remain the industry standard and reach
good performances for most applications with an
easy to understand structure. Nevertheless, it is easy
to implement other controller structures in the
algorithm.
The method consists in tuning SISO controllers
independently for each SISO system thanks to the
optimization of a cost function depending on the
controllers parameters. Similar criteria are defined
thereafter for each loop of the system for DNA and
INA analysis.
3.1 Stability
As seen before, to ensure stability, Gershgorin
(respectively Ostrowski) bands must not include the
critical point. Moreover, the bands have to encircle
anticlockwise the critical point a number of times
corresponding to the number of open-loop unstable
poles (respectively unstable zeros).
To take in consideration the number of
encirclements, one idea is to force the Nyquist locus
(respectively the inverse of the Nyquist locus) to
travel through specific areas. After a brief study of
Multi-loopControlUsingGershgorinandOstrowskiBands
637
the plant and the shape of its Nyquist locus, it is
possible to define attractive areas depending on the
number of the open-loop unstable poles
(respectively unstable zeros).
For instance, let us consider an open-loop
monovariable system Q with an unstable pole, the
Nyquist locus of which presents infinite branches
that do not encircle the critical point. Ensuring that
locus crosses the real axis at the left of the critical
point and travelling below it are sufficient conditions
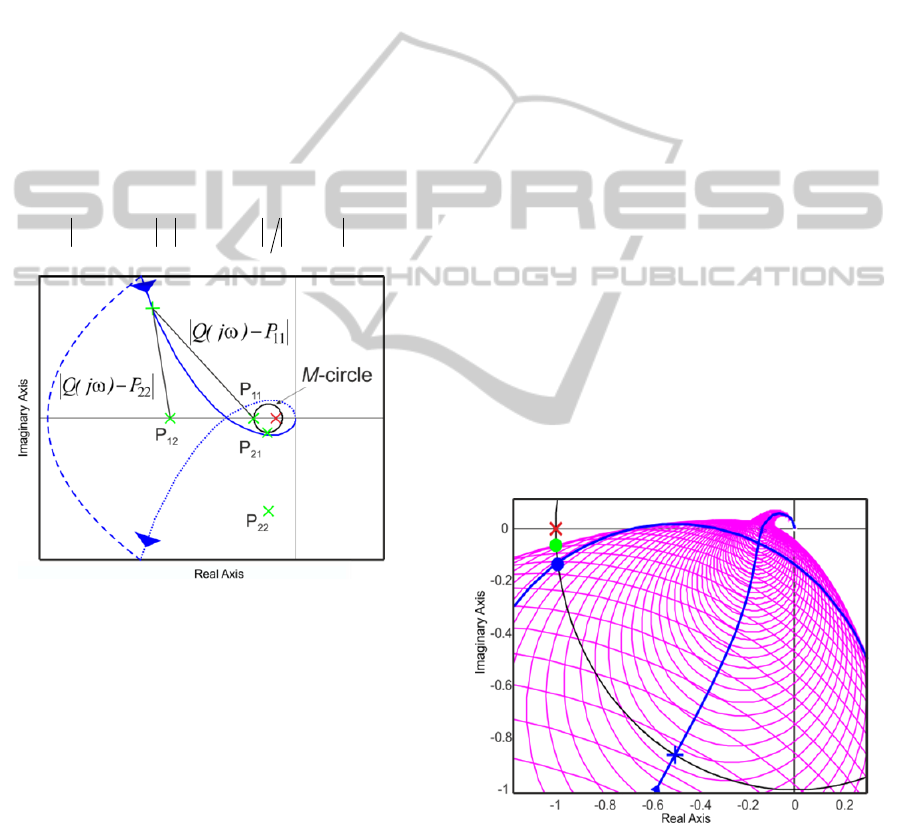
to have closed-loop stability as in Figure 2.
For each attractive area k, a measure of distance
between the nearest point of the Nyquist locus with
the segment [P
k1
,P
k2
] is constituted by (12). To force
the Nyquist locus to travel through these attractive
areas, the distances D
k
will be minimized. In Figure
2, two attractive areas are defined with [P
11
,P
12
] and
[P
21
,P
22
]. To facilitate the readability, only the
calculation of D
1
is presented.
2121
-)-)(-)((inf
kkkkk
PPPjQPjQD
(12)
Figure 2: Calculation of D
1
with checkpoints P
11
, and P
12
.
This allows to find a controller that stabilizes the
closed-loop system, even if the initial conditions of
the optimization match with a controller
configuration leading to an unstable closed-loop.
For SISO systems, robustness against model
uncertainties is ensured if the direct or inverse
Nyquist loci present sufficient phase margin. Note
that the phase margin of the inverse of a SISO
system is the opposite of the phase margin of the
system.
The determination of the phase margin of a
MIMO system is not obvious (Ye et al., 2008). In
this paper, phase margin is assessed applying the
previous considerations for SISO systems to
Gershgorin bands (respectively Ostrowski bands). In
(Ho, Lee, and Gan, 1997), the circle at the cutoff
frequency is used to determine the phase margin.
The problem is that in some configurations, circles
at other frequencies can be closer from the critical
point than the one at the cutoff frequency.
An example is presented in Figure 3 where the
blue point represents the crossing of the circle at the
cutoff frequency with the unit circle, and the green
point corresponds to the point associated with true
phase margin. Thus, it seems more relevant to
consider the envelope of the circles.
It is then possible to define an objective with a
specified phase margin M
φ
* (when using INA, the
opposite of the specified phase margin is used).
Besides ensuring stability, the phase margin leads to
an upper bound for the damping of the system. It is
also possible to define the gain margin using the
envelope of the bands in the same way. Thus, a
minimum gain margin can be obtained considering a
specified gain margin M
g
* in the criterion to
optimize (when using INA, the opposite of the
specified gain margin is used).
In DNA, Gershgorin bands ensure the same
stability margins for all loops. Indeed, when the
bands are superimposed (which is often the case
when approaching the critical point), the
characteristic loci of each diagonal element are not
necessarily contained in the Gershgorin bands of this
element. The global stability margins finally match
with the worst stability margins determined from the
different bands.
By contrast, Ostrowski bands can ensure
different stability margins for each loop.
Figure 3: Phase margin for a MIMO process.
3.2 Performances
To give an upper bound of the peak modulus of the
closed-loop frequency response of system, the
complementary modulus margin is considered
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
638

(Bourlès, 2010). It represents physically the inverse
of this maximum gain.
)()(
)()(1
inf
jGdjK
jGdjK
c
M
(13)
A criterion is then defined with an objective M
c
*
to reach. This specification can be directly
interpreted in the Nyquist diagram thanks to M-
circles (Mirkin, 2011) which are the contours of the
constant closed-loop magnitude. M-circles are
described by the equation:
)²1²(
²
22
1²
²
)(
M
M
M
M
YX
(14)
X and Y are the real and imaginary coordinates in
the complex plane and M is the magnitude of the
closed-loop transfer function. In order to satisfy
simultaneously stability and closed loop maximum
modulus conditions, the points P
k1
can be chosen
adequately on the specified M-circle as shown in
Figure 2. There are no real rules to set the points P
k2
,
they only have to be far enough from the points P
k1
.
The crossover frequency highly impacts the
bandwidth of the closed-loop system. It is then
useful to take it into account in a criterion, defined
with a desired crossover frequency ω
c
*.
In order to cancel the static error and reduce the
tracking error, the integral action of the controller,
whose structure is given in (15), is maximized:
1
1
1)(
s
sT
sT
p
N
d
T
d
i
KsK
(15)
The criteria for previously considered concepts,
are summarized here:
k
k
DJ
1
(16)
**
2
)(
MMMJ
(17)
**
3
)(
ggg
MMMJ
(18)
**
4 ccc
MMMJ
(19)
**
5 ccc
J
(20)
i
TJ
6
(21)
3.3 Optimization
For each SISO loop, the controller parameters are
determined by solving a least-square optimization
problem characterized by a criterion J taking into
account the criteria previously described:
6
1
2
k
kk
JqJ
(22)
This cost function presents weighting factors q
k
that give more or less importance to each criterion.
If the initial choice for the parameters lead to a
stable closed-loop system, J
1
is not necessary. Often,
it is sufficient to take into account J
2
for robustness
stability so that J
3
may not be considered. To speed
up the optimization, controllers found with classical
SISO methods (Astrôm and Hägglund, 1995) can be
used for initial conditions.
Each optimization gives the controller parameter
settings for one SISO loop and the tuning of the
other SISO loops do not affect the stability of the
loop already tuned, which makes this method
interesting.
3.4 DNA and INA
As seen in the previous part, the two approaches
work with a similar algorithm. However, conditions
for stability are not the same and the algorithm lead
to different solutions. It is not obvious to guess a
priori which one is the least conservative. The size
of Gershgorin bands of the plant only depends on the
magnitude of the coupling terms. The ratio between
off-diagonal terms and diagonal terms gives the
distance between the bands and the origin of the
Nyquist diagram. However, we are interested in the
distance between the bands and the critical point and
there is no information about that. That is why it is
difficult to know which method to prefer.
Even if the Gershgorin bands can be used to
predict stability when the gains in all the loops
change simultaneously, the DNA method deals with
eigenvalues of the system that can be sensitive to
model perturbations. It is thus less robust than the
INA method where stability is ensured considering a
monovariable system. Another advantage of INA is
that it can be used to indicate whether the system
would be stable if one loop failed.
Finally, the choice of the method is determined
by the shape of the frequency response of the plant.
Ability to make the direct (inverse) open loop
matrix transfer column (row) diagonal dominant can
lead the choice for the method DNA (INA).
3.5 Case of TITO Plants
The case of TITO processes is specific because of
the form of the inverse of the system:
1121
1222
21122211
2221
1211
1
ˆ
GG
GG
GGGG
G
GG
GG
G
dd
(23)
Multi-loopControlUsingGershgorinandOstrowskiBands
639
If G
d
is column diagonally dominant, it implies
that G
d
-1
is row diagonally dominant. In addition, the
ratio between magnitudes of diagonal terms with
off-diagonal terms is conserved.
The consequence is that DNA and INA are not
exclusive. Indeed, the first one requires the column
diagonal dominance of the system and the second
one requires the row diagonal dominance of the
inverse of the system, and these properties are
equivalent. These considerations are only true for
TITO systems. Indeed, in the general case, the
inverse of a column diagonally dominant system is
not a priori row diagonally dominant.
4 SIMULATION EXEMPLES
Academic examples are now considered to
demonstrate the efficiency of this method with a
great variety of processes.
4.1 Optimization with INA
In this first example, G
d
is a TITO plant described
by:
)1.06.0(
)5(2.0
)1)(2(
1
)3.0)(5.0(
1
)25.0)(4.0(
)1.0(
2
ss
s
ss
ssss
s
G
d
(24)
Technical specifications are described in Table 1.
The inverse of the plant is row diagonal dominant,
the INA can thus be applied. Settings of the
designed controller are presented in Table 2. Due to
its negligible derivative action, the first controller
has been simplified in a PI one.
Hereafter figures present Nyquist loci and
inverse Nyquist loci respectively in blue and green,
and the points defining phase margins represented
by crosses. Gershgorin and Ostrowski bands are
respectively drawn in magenta and yellow. Nyquist
diagrams and Gershgorin bands are plotted in Figure
4 for the two diagonal terms. The plots on the left-
hand side give an overview of the Nyquist diagrams.
Table 1: Technical specifications.
Controller
Complementary
Modulus Margin
Crossover
frequency
(rad/s)
Phase
Margin
(°)
K
1
1/1.05 0.7 35
K
2
1/1.05 0.7 35
Table 2: Controllers parameters.
Controller
K
p
T
i
T
d
N
K
1
0.26 0.47 X X
K
2
-0.62 4.2 1.0 33
In the first case, the inverse Nyquist locus and
Ostrowski bands do not encircle the critical point. In
the second loop, the inverse Nyquist locus encircles
the critical point once that is logical because the
second loop contains one unstable zero.
Stability can also be analyzed with Gershgorin
bands. The open-loop transfer matrix is stable and it
can be checked that Gershgorin bands do not
encircle the critical point.
The right diagrams zoom on the critical point to
check that specifications are satisfied. As it can be
seen, phase margins are compliant. For the first loop,
the phase margin obtained with Gershgorin bands is
similar to the one obtained with Ostrowski ones.
However, for the second loop, the phase margin
obtained with Gershgorin bands is clearly smaller
than the one obtained with Ostrowski bands. If DNA
had been chosen, the settings of the controller would
not have been found because the phase margin
would not have been satisfied. The benefits of INA
appear clearly in this case.
M-circles are also drawn to visualize the
complementary modulus margins. For each loop, the
Nyquist loci tangent the M-circles. That means the
complementary modulus margins are fulfilled.
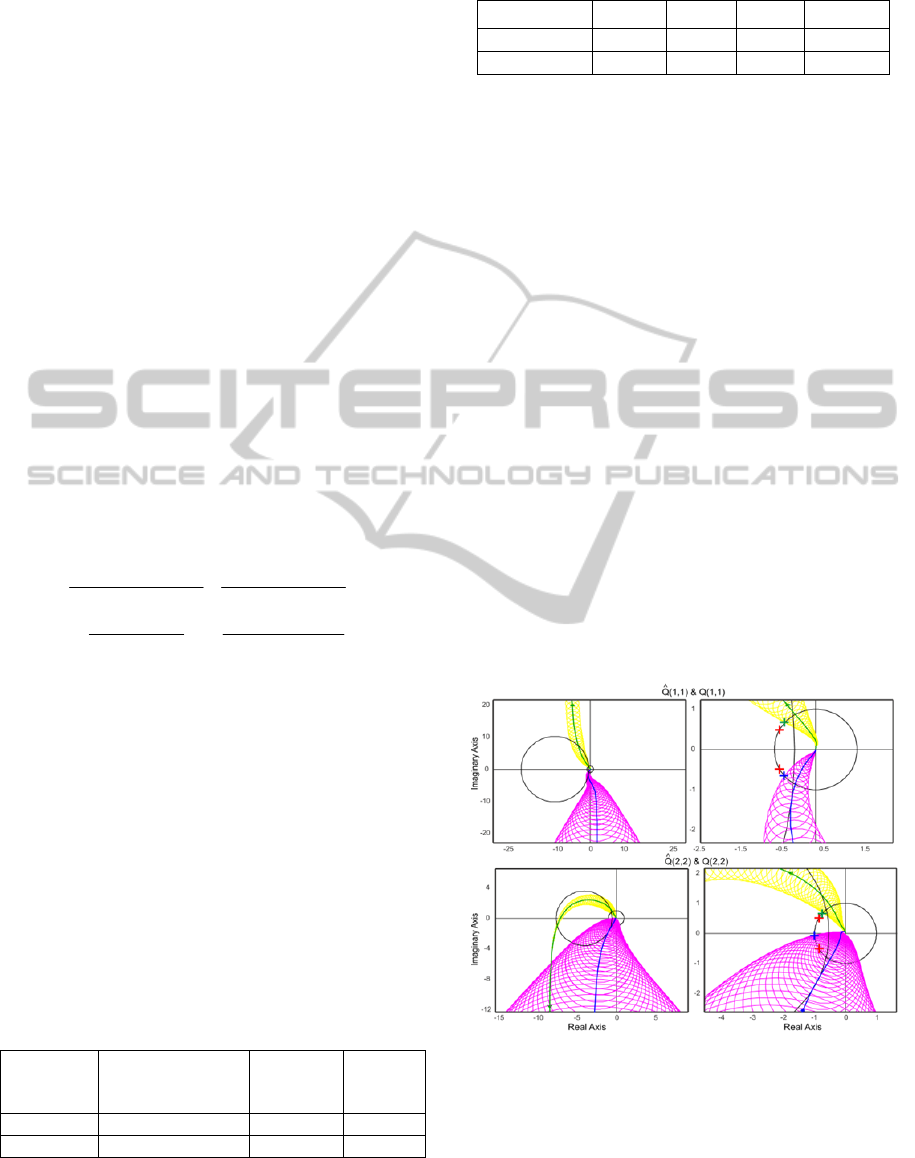
Figure 4: Nyquist-array of the designed loops.
4.2 Optimization with DNA
Consider the MIMO process described by the 3×3
transfer matrix G
d
in (25). By analysing the plant, it
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
640

can be seen that medium interactions are still
present.
)5)(20(
)10(3
)15)(50(
)20(5.0
)1)(2(
5.0
)106)(2(
)10(2.0
1
)05.0exp(
)1)(2(
5.0
)2)(15(
1
10
25.0
234
)05.
0exp(8
2
2
sss
s
ss
s
ss
sss
s
s
s
ss
sss
ss
s
G
d
(25)
To present several study cases, each diagonal
element has a different structure. The first diagonal
term is stable and includes a time delay. The second
diagonal term has one unstable pole and includes a
time delay as well. The third diagonal term includes
an integrator and has two unstable poles.
G
d
is column diagonally dominant, the algorithm
with DNA can thus be applied and PID controllers
have been chosen. Technical specifications are
described in Table 3 and details of the controller
settings K
1
, K
2,
and K
3
are presented in Table 4.
Due to its negligible derivation action, a PI
controller has finally been designed for the second
loop. Performances broadly match with technical
specifications. Nyquist diagrams and Gershgorin
bands are plotted in Figure 5 for each diagonal term.
As in the first example, the plots on the left-hand
side give an overview of the Nyquist diagrams to
check that the number of anticlockwise
encirclements matches with the number of unstable
poles (respectively 0, 1 and 2 for the three loops). It
can be seen on the diagrams on the right-hand side
that Gershgorin bands do not include the critical
point and fulfilled the specified phase margins.
Moreover, complementary modulus margins are
satisfied.
Table 3: Technical specifications.
Controller
Complementary
Modulus Margin
Crossover
frequency
(rad/s)
Phase
Margin
(°)
K
1
1/1.05 10 30
K
2
1/1.4 10 30
K
3
1/1.15 300 30
Table 4: Controllers parameters.
Controller
K
p
T
i
T
d
N
K
1
4.6 1.1 1 9960
K
2
7.45 0.63 X X
K
3
1610 0.38 0.065 990
Figure 5: Nyquist-array of the designed loops.
4.3 Analysis using Row and Column
Dominance
Consider now the TITO process:
)5)(20(
240
)50()100(
)75(100000
)2)(25(
)1.0(30
182580
)1.0exp(2000
22
22
ss
ss
s
ss
s
ss
s
G
d
(26)
The system is column diagonal dominant and
technical specifications are given in Table 5. The
design is performed with PI controllers with the
proposed algorithm for DNA and details of the
controller settings are presented in Table 6.
Table 5: Technical specifications.
Controller
Complementary
Modulus Margin
Crossover
frequency
(rad/s)
Phase
Margin
(°)
K
1
1/1.05 6 45
K
2
1/1.05 6 45
Table 6: Controllers parameters.
Controller
K
p
T
i
K
1
0.27 0.05
K
2
0.54 0.14
In figure 6, Nyquist diagrams of the two diagonal
Multi-loopControlUsingGershgorinandOstrowskiBands
641
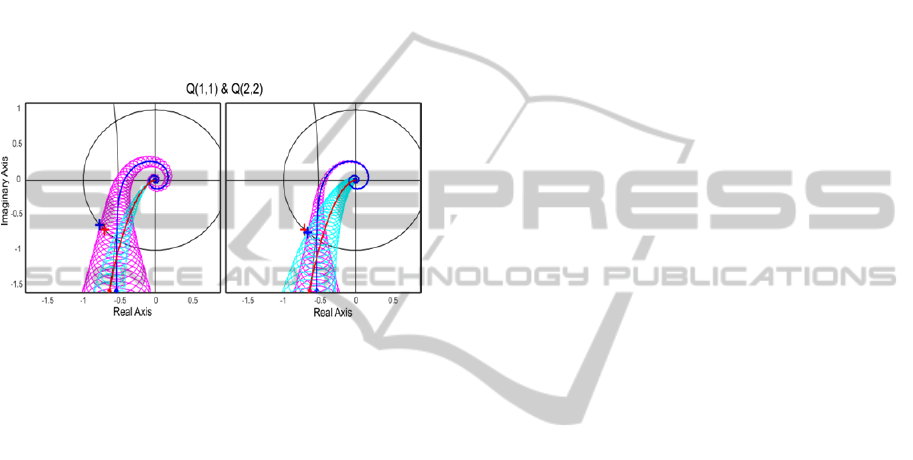
elements are plotted in blue and red and the
associated bands are respectively in magenta and
cyan.
Considering column Gershgorin bands in Figure
6a, the worst phase margin does not satisfy the
specified one. It can be noted that Q
12
is much
smaller than Q
21
close to the cutoff frequency (bands
of the second loop are much thinner than those of
the first one). By plotting row instead of column
Gershgorin bands as in Figure 6b, the largest bands
become further from the critical point. Thanks to this
analysis, it is possible to ensure the specified phase
margin for the MIMO system.
(a) (b)
Figure 6: Nyquist-array of the designed loops.
Row Gershgorin bands can not be considered for
the design of the controllers as seen before but can
be used to assess stability as well. It is similar for
column Ostrowski bands.
Moreover, once design has been done whatever
the chosen approach, Gershgorin and Ostrowski
bands can be superimposed to determine stability
margins.
5 CONCLUSIONS
This paper proposes a new method of tuning multi-
loop controllers. SISO controllers can be designed
independently using DNA or INA thanks to the
optimization of similar cost functions. The described
procedure aims to reach some performances while
ensuring stability robustness of the closed-loop
multivariable process thanks to Gershgorin bands in
DNA and Ostrowski bands in INA. By
superimposing both Gershgorin and Ostrowski
bands, it is possible in some cases to reduce the
conservatism of the chosen approach.
PID controllers have been chosen in this study
but the method can be easily applied with other
types of controllers.
To conclude, the proposed method offers a
straightforward and systematic way of designing
MIMO controllers, while still leaving freedom to the
designer. Simulation results illustrate the good
performances obtained by this method for a wide
range of processes.
Future works will focus on the adaptation of the
methodology to improve the multivariable
performances, particularly concerning the dynamic
couplings of the closed-loop system.
REFERENCES
Albertos, P., Sala, A., 2004. Multivariable control
systems. Springer.
Aström, K., Hägglund, T., 1995. PID Controllers: Theory,
Design, and Tuning, 2
nd
edition, ISA.
Bell, D. J., Cook, P. A., Munro N., 1982. Design of
Modern Control Systems. Peter Peregrinus.
Bourlès, H., 2010. Linear Systems. Wiley.
Chen, D., Seborg, D. E., 2002. “Multiloop PI/PID
controller design based on Gershgorin bands”. IEEE
Proceedings, Control Theory and Applications.
Garcia, D., Karimi, A., Longchamp, R., 2005. “PID
Controller Design for Multivariable Systems using
Gershgorin Bands”. IFAC.
Ho, W. K., Lee, T. H., and Gan, O. P., 1997. “Tuning of
multiloop PID controllers based on gain and phase
margin specifications”. Industrial & Engineering
Chemistry Research.
Huang, H. P., Jeng, J. C., Chiang, C. H., Pan, W., 2003.
“A direct method for multi-loop PI/PID controller
design”. Journal of Process Control 13, 769-786.
Leigh, J. R., 1982. Applied Control Theory. Peter
Peregrinus.
Macfarlane, A. G. J., Postlethwaite, I., 1977. “The
Generalized Nyquist Stability Criterion and
Multivariable Root Loci”. International Journal of
Control.
Maciejowski, J. M., 1989. Multivariable Feedback
Design. Addison Wesley.
Mirkin, L., 2011. Control Theory. Lectures, Faculty of
Mechanical Engineering Technion-IIT.
Rosenbrock, H. H., 1969. “Design of multivariable control
systems using the inverse Nyquist array”. Proceedings
IEEE, Vol. 116.
Skogestad, S., Morari M., 1989. “Robust Performance of
Decentralized Control Systems by Independent
Designs”. Automatica, Vol. 25, No. 1, 119-125.
Skogestad, S., Postlethwaite I., 1996. Multivariable
Feedback Control - Analysis and design. Wiley.
Vaes, D., 2005. Optimal Static Decoupling for
Multivariable Control Design. PhD. Dissertation,
Catholic University of Leuven.
Ye, Z., Wang Q.-G., Hang C. C., Zhang Y., Zhang Y.,
2008. “Frequency domain approach to computing loop
phase margins of multivariable systems”. IFAC.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
642
