
Multi-cameras Visual Servoing to Perform a Coordinated Task using a
Dual Arm Robot
Renliw Fleurmond
1,2
and Viviane Cadenat
1,2
1
CNRS, LAAS, 7 avenue du Colonel Roche, F-31400 Toulouse, France
2
Univ. de Toulouse, UPS, LAAS, F-31400 Toulouse, France
Keywords:
Dual Arm Robots, Coordination, Vision-based control, Multi-cameras visual servoing.
Abstract:
This paper deals with the problem of coordinating a dual arm robot equipped with several cameras. Our goal
is to propose a vision-based control strategy allowing to realize a real cooperation of the two arms. The idea
is to sequence different vision based tasks built from visual features describing the relative pose between the
cap and the pen. Simulation results validate our approach.
1 INTRODUCTION
Dual arm manipulation has been studied since the
eighties (Caccavale and Uchiyama, 2008). At the be-
ginning, the objective was to enhance the range of re-
alizable industrial applications. It then became pos-
sible to carry heavy loads (Bonitz and Hsia, 1996),
manipulate flexible objects (Zheng and Chen, 1993),
or assemble pieces (Yamada et al., 1995). Neverthe-
less, the recent development of service robots has led
to the design of new mobile robotic systems able to
help people in their daily life (co-worker, etc.) (Smith
et al., 2012). To complete such missions, these robots
must be able to perform complex manipulation tasks,
which requires to coordinate both arms motion. Ac-
cording to (Zollner et al., 2004), coordination tasks
can be divided into two classes : symmetric coordina-
tion when both arms manipulate the same object and
asymmetric coordination where they carry different
objects.
The coordination problem can be tackled at dif-
ferent levels and through many approaches (Smith
et al., 2012). In particular, it has been shown that
a pure position feedback is unable to deal with this
kind of problem because of its sensitivity to mod-
eling errors (Caccavale et al., 2001). Consequently,
other approaches using exteroceptive data have been
developed. Common solutions rely on hybrid po-
sition/force based control laws (Kraus and McCar-
ragher, 1997; Watanabe et al., 2005) or active compli-
ance control laws (Bonitz and Hsia, 1996; Albrichs-
feld and Tolle, 2002). However, other kinds of extero-
ceptive data such as vision can be exploited, the robot
being then controlled using visual servoing. This
kind of control offers two main advantages which ap-
pear to be quite interesting in the context of dual arm
manipulation. First, it can be realized using several
(embedded and/or external) cameras (Kermorgant and
Chaumette, 2011), which allows to benefit from com-
plementary information on the task execution. Sec-
ond, visual servoing, especially image based control,
is known to offer nice robustness properties, which al-
lows to accurately perform the task (Chaumette and
Hutchinson, 2006). However, to the best of our
knowledge, there are only few works which have re-
ally dealt with dual arm visual servoing (Smith et al.,
2012). We present hereafter a brief overview. In
(Miyabe et al., 2003) 2D visual servoing is used to
simultaneously and independently control two arms
to capture an object. In (Hynes et al., 2006) the two
arms are alternatively controlled using visual servo-
ing to tie surgical knots. Finally, Vahrenkamp et al.
propose a 3D visual servoing to control the arms of a
humanoid robot in order to grasp the handles of a wok
or pour liquid from a bottle into a cup (Vahrenkamp
et al., 2009). Thus, in these works, the coordination
problem is not completely solved, the two arms being
often separately or alternatively controlled.
In this paper, we address the coordination prob-
lem from a control point of view. We aim at design-
ing a vision-based control strategy allowing to truly
coordinate the motions of a dual arm robotic system
equipped with several cameras. In other words, the
control will be defined so that both arms simultane-
ously move to perform the desired task. Here, we
37
Fleurmond R. and Cadenat V..
Multi-cameras Visual Servoing to Perform a Coordinated Task using a Dual Arm Robot.
DOI: 10.5220/0005017700370044
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 37-44
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

have chosen to realize an asymmetric coordination
task consisting in recapping a pen. Our idea is to
build an image based visual servoing (IBVS) control
to benefit from its good robustness properties with re-
spect to modeling errors (Chaumette and Hutchinson,
2006). This control law will be fed using the data
provided by two different cameras (a fixed one and a
mobile one) mounted on the robot. We will then de-
velop a multi-camera visual servoing. To do so, as in
(Uchiyama and Dauchez, 1988; Dauchez et al., 2005),
we have considered the two arms as a single robotic
system to be controlled. Furthermore, (Dauchez et al.,
2005) and (Adorno et al., 2010) have shown that the
realization of a coordination task requires to define
it in terms of the relative pose between the two end-
effectors. Here, we have followed a similar reasoning,
except that our task will be directly expressed in the
image plane instead of the 3D space, which will lead
to the design of a more robust control law. This latter
will be obtained by regulating to zero a relative error
between the visual features describing the cap and the
pen provided by the cameras.
This paper is organized as follows: the two next
sections describe our contribution, namely the prob-
lem modeling and the proposed control strategy. Sim-
ulation results validating our approach are then pre-
sented while the last section is devoted to a conclusion
and some prospects.
2 MODELING THE PROBLEM
2.1 Robot Model
Our robotic platform is the PR2 developed by Wil-
low Garage. It consists of an omnidirectional mobile
base equipped with two 7-DOF robotic arms. We con-
sider that the mobile base and the head are fixed in
this work. The robot has several cameras, and as ex-
plained before we will use the information provided
by two of them to perform the task. The first one,
whose center is denoted by C
f
is fixed on the head and
has a large field of view. The second one, whose cen-
ter is denoted by C
m
, is located on the right forearm.
It gives us additional information on the scene which
will be useful when assembling the two objects.
We introduce the different frames which will
be necessary to model our problem (see figure 1).
F
w
(O
w
,x
w
,y
w
,z
w
) is fixed and represents the world
frame. F
l
(O
l
,x
l
,y
l
,z
l
) and F
r
(O
r
,x
r
,y
r
,z
r
) are re-
spectively the frames linked to the left and right end
effectors. F
f
(C
f
,x
f
,y
f
,z
f
) and F
m
(C
m
,x
m
,y
m
,z
m
)
are respectively the frames attached to fixed and mo-
bile cameras. We denote by q
r
and q
l
(respectively
˙q
r
and ˙q
l
) the joint coordinates (respectively the joint
velocities ) of the right and left arms.
x
f
y
f
z
f
C
f
x
m
y
m
z
m
C
m
x
r
y
r
z
r
O
r
x
l
y
l
z
l
O
l
x
w
y
w
z
w
O
w
Figure 1: The robotic platform and the different frames.
Using these notations, the kinematic screws of the
end effectors T
r
and T
l
, and of the mobile camera T
m
with respect to F
w
are given by the direct differential
kinematic model as follows:
T
r
= J
r
˙q
r
, T
l
= J
l
˙q
l
, T
m
= J
5r
˙q
r
(1)
where J
r
, J
l
and J
5r
are 6 × 7 matrices which have
been already determined. These kinematic screws are
respectively expressed in frames F
r
, F
l
and F
m
.
2.2 Modeling the Task
As previously mentioned, the task which is consid-
ered here consists in recapping a pen. To do so, we
first introduce the two following hypotheses:
• Hyp 1: The cap and the pen are respectively
gripped by the right and left arms.
• Hyp 2: The two objects are modeled by two cylin-
ders as shown in figure 2. Furthermore, in the se-
quel, to avoid some singularities, we assume that
these objects are always seen as shown in this fig-
ure.
Figure 2: Cap and pen model.
To recap the pen, the robot has to align both cylin-
ders before connecting them. But this movement can-
not be done directly. We then divide the task into the
three following subtasks as illustrated in figure 3
1
:
• Make both cylinders axes coplanar while ensur-
ing a sufficient distance between the two objects.
1
The pen is shown as if it is fixed for the sake of clarity.
But of course both objects are allowed to move.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
38
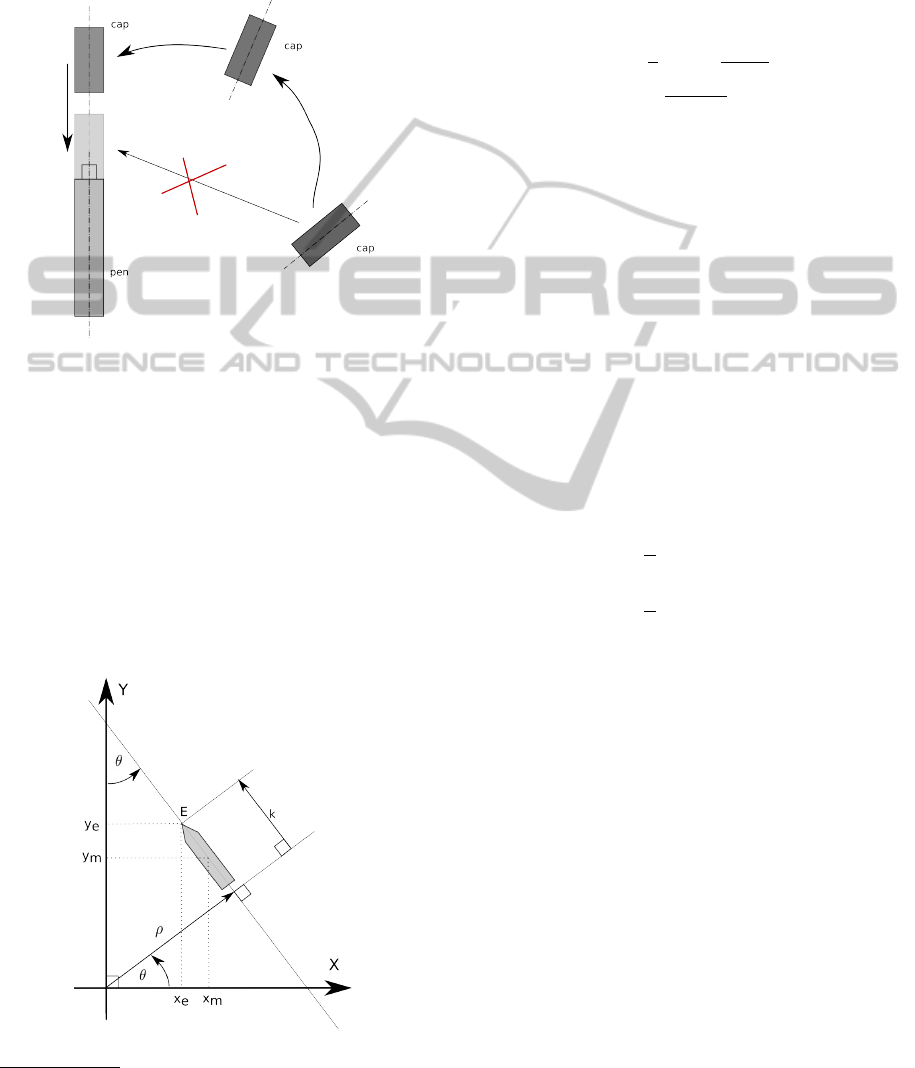
• Make both cylinders axes collinear while ensur-
ing a sufficient distance between the two objects.
• Maintain the alignment and bring the cap near the
pen.
Figure 3: Steps to recap the pen.
2.3 Visual Features
In this part, our goal is to choose visual features al-
lowing to represent the cap and the pen. Espiau et al.
(Espiau et al., 1992) have used two lines to define the
contour of the cylinder projection. Here we have cho-
sen to consider the projection of the cylinder axis on
the image plane. This straight line is obtained from
the axis of the grey area (cf. figure 4) corresponding
to the cylinder
2
in the image.
Figure 4: Visual features used: ρ, θ and k.
2
It is not an exact value of the projection of the axis but
it provides a good approximation.
We have then represented the line by using polar
parameters (ρ, θ) as in (Espiau et al., 1992). In this
representation, ρ is the distance between the line and
the center of the image, and θ is its relative orientation
with respect to the vertical axis (cf. figure 4). To com-
pute these features we have used the formulas given
in (Berry et al., 2000). We get:
θ =
1
2
atan
2I
xy
I
x
− I
y
ρ =
q
x
2
m
+ y
2
m
where (x
m
,y
m
) is the center of mass of the area repre-
sented in grey in the figure 4.
However, with such a representation, two lines
which are symmetrical with respect to the origin are
characterized using the same parameters. To over-
come this ambiguity, we have allowed ρ to be positive
or negative as in (Espiau et al., 1992). We have cho-
sen to compute ρ by using this following expression:
ρ = x
m
.cos(θ) + y
m
.sin(θ) (2)
I
xy
, I
x
and I
y
are the second order moments of this
area, and their well-known expressions are given by
(Chaumette, 2002a):
A =
∑
area
1
x
m
=
1
A
∑
area
x
y
m
=
1
A
∑
area
y
I
x
=
∑
area
(x − x
m
)
2
I
y
=
∑
area
(y − y
m
)
2
I
xy
=
∑
area
(x − x
m
)(y − y
m
)
Parameters θ and ρ allow us to partially control
the orientation and the position of the objects. How-
ever, it is also necessary to monitor the translation of
a cylinder along its axis. To this aim, we introduce a
third parameter k which expresses the position of one
end point E (x
e
,y
e
) of the cylinder on the straight line
(cf. figure 4). We get:
k = y
e
· cos(θ) − x
e
· sin(θ) (3)
Thus, the image of each cylinder is described by
three parameters. As we consider two cylindrical ob-
jects and two cameras, we define the four following
visual features vectors:
Multi-camerasVisualServoingtoPerformaCoordinatedTaskusingaDualArmRobot
39

Cap
Fixed camera Moving camera
S
f c
= [ρ
f c
,θ
f c
,k
f c
]
T
S
mc
= [ρ
mc
,θ
mc
,k
mc
]
T
Pen
Fixed camera Moving camera
S
f p
= [ρ
f p
,θ
f p
,k
f p
]
T
S
mp
= [ρ
mp
,θ
mp
,k
mp
]
T
Remark: A singularity occurs in the representation
of the visual features if the area is a disc because I
x
=
I
y
and I
xy
= 0. However this case cannot happen here
thanks to hypothesis 2.
3 CONTROL STRATEGY
To perform our task, we have chosen to use visual
servoing which allows to control a robot using the vi-
sual informations provided by one or several cameras
(Chaumette and Hutchinson, 2006). Visual servoing
can be roughly speaking divided into three classes:
3D, 2D, 2D-1/2 (Chaumette and Hutchinson, 2006).
Here we have used the second approach also known
as image based visual servoing (IBVS), because of its
well-known properties of robustness with respect to
errors (Chaumette and Hutchinson, 2006).
To design our control law we have used the task
function approach (Samson et al., 1991) where the
task is described by a n-dimensional C
2
function
e(q,t), to be regulated to zero.
As classically done in the visual servoing area
(see for example (Espiau et al., 1992; Chaumette and
Hutchinson, 2006)), we impose an exponential decay
to make e(q,t) vanish. This controller is given by (Es-
piau et al., 1992) :
˙q = −J
+
λe (4)
where λ is a positive gain or a positive-definite matrix,
J the jacobian of the task function and J
+
its Moore-
Penrose inverse.
Our goal is to use this formalism to design our
control law. To this aim, we first consider the two
arms as a single robotic system as in (Uchiyama and
Dauchez, 1988; Dauchez et al., 2005). The control
vector will then be composed of the joint velocities
of both arms: ˙q =
˙q
T
r
˙q
T
l
T
. Moreover, it is nec-
essary to define the task functions corresponding to
the above mentioned three tasks. In 2D visual ser-
voing e(q,t) is generally given by an error between
the current vector of visual features S and the de-
sired ones S
∗
, S
∗
being often constant. However, if
we follow this reasoning to define our task functions,
we will monitor the absolute pose of the two objects
with respect to the world frame, and the arms will be
separately controlled. Therefore, to really coordinate
the two arms, it is truly better to focus on the rela-
tive pose between the end effectors, as proposed in
(Adorno et al., 2010; Dauchez et al., 2005). Follow-
ing the same idea, we express the task functions as a
relative error between the visual features representing
to the cap and the pen.
3.1 The Task Functions
In this part, the aim is to model the previously men-
tionned subtasks by three task functions e
1
, e
2
, e
3
. We
consider the first one. To perform this substask, it is
necessary to constrain the two cylinder axes to belong
to the same plane. To do so, it suffices to align their
projection in one image. We have chosen to use the
one provided by the mobile camera. The first subtask
is then expressed as follows:
e
1
=
ρ
mc
− ρ
mp
θ
mc
− θ
mp
k
mc
− k
mp
− d
(5)
where d is a constant value allowing to maintain a
given distance between the cap and the pen.
Now, we consider the second subtask. Its goal is to
align the axes of the two cylinders. At least two points
of view are necessary to guarantee that two straight
lines are aligned. Therefore we have to consider the
visual features provided by both cameras, which leads
to implement a multi-cameras visual servoing control
law. Our second subtask is defined as shown below:
e
2
=
e
1
ρ
f c
− ρ
f p
θ
f c
− θ
f p
(6)
Finally, our last subtask has to keep the axes
aligned while bringing the cap to the pen. We pro-
pose the following expression:
e
3
=
S
mc
− S
mp
S
f c
− S
f p
(7)
Taking into account the expressions of e
1
, e
2
, and
e
3
, it is possible to show that these subtasks can be
re-written as follows:
e
i
= H
i
·
S
mc
− S
mp
− A
i
S
f c
− S
f p
(8)
where H
i
is an activation matrix which allows to se-
lect only the necessary visual features. H
i
and A
i
are
defined for each subtask e
i
as shown below:
H
1
=
I
3×3
0
3×3
and A
1
= [0,0, d]
T
H
2
=
I
5×5
0
5×1
and A
2
= [0,0, d]
T
H
3
= I
6×6
and A
3
= 0
3×1
Once the task functions are defined, we now focus
on the control law allowing to regulate them to zero.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
40

3.2 Control Design
To design the control law, our idea is to use equation
(4). To this aim, we have to determine the jacobian of
each task function. Using the general formulation (8),
the time derivative of our subtasks e
i
is given by:
˙e
i
= J
i
˙q, ˙e
i
= H
i
·
˙
S
mc
−
˙
S
mp
˙
S
f c
−
˙
S
f p
(9)
Following (Chaumette, 2002b), the time deriva-
tive
˙
S of a given visual features vector denoted by S
expresses as follows:
˙
S = L · (T
c
− T
o
) (10)
where L is the interaction matrix, T
c
and T
o
are re-
spectively the kinematic screws of the camera and of
the mobile target with respect to the world frame F
w
.
They are expressed in the camera frame. Let us re-
call that we consider two cameras: a mobile one and
a static one. We have to express T
c
and T
o
in both
cases.
3.2.1 Fixed Camera
In this case, the camera kinematic screw T
c
is zero.
Thus it remains to compute T
o
. Here T
o
represents the
kinematic screw of the moving object (cap or pen).
This screw must be expressed at a particular point of
the object which coincides at every moment with the
fixed camera center C
f
. To determine it, let us recall
the following well-known relation (P
´
erez, 1989):
T
b
=
b
M
a
T
a
where
b
M
a
=
I
3×3
[AB]
×
0 I
3×3
where T
a
and T
b
are the kinematic screws of two
points A and B belonging to the same mobile solid.
They are expressed with respect to a fixed frame.
AB
×
is the skew-symmetric matrix such as ∀
~
V ∈
R
3
, [AB]
×
~
V =
−→
AB ×
~
V .
Recalling that the cap is moved by the left end ef-
fector and the pen by the right one, and that T
o
must
be expressed in the camera frame F
f
, the following
expressions yield:
• For the cap
T
o
=
f
R
r
0
3×3
0
3×3
f
R
r
f
M
r
T
r
=
f
W
r
T
r
• For the pen
T
o
=
f
R
l
0
3×3
0
3×3
f
R
l
f
M
l
T
l
=
f
W
l
T
l
where
f
R
r
and
f
R
l
are respectively the rotation matri-
ces between F
r
and F
f
, and F
l
and F
f
.
Now combining these expressions and the equa-
tions (1) and (10), the time derivatives of S
f c
and S
f p
are:
˙
S
f c
= −L
f c
f
W
r
J
r
˙q
r
(11)
˙
S
f p
= −L
f p
f
W
l
J
l
˙q
l
(12)
where L
f c
and L
f p
are the interaction matrices corre-
sponding to S
f c
and S
f p
. Their expressions are de-
tailed in appendix A.
3.2.2 Moving Camera
In this case, the camera and the two objects are both
moving. We have then to determine the kinematic
screws T
c
and T
o
. The first one is already known and
is given by T
m
(see equation (1)).
It then remains to compute T
o
. We follow the
same reasoning as previously, keeping in mind that
the kinematic screw must be expressed at the point
which coincides with the center C
m
of the mobile
camera. We finally obtain the following result:
• For the cap
T
o
=
m
R
r
0
3×3
0
3×3
m
R
r
m
M
r
T
r
=
m
W
r
T
r
• For the pen
T
o
=
m
R
l
0
3×3
0
3×3
m
R
l
m
M
l
T
l
=
m
W
l
T
l
where
m
R
r
and
m
R
l
are respectively the rotation ma-
trices between F
r
and F
m
and F
l
and F
m
.
Using (10) and (1), we obtain the time derivative
of S
mc
and S
mp
:
˙
S
mc
= L
mc
(J
5r
˙q
r
−
m
W
r
J
r
˙q
r
) (13)
˙
S
mp
= L
mp
(J
5r
˙q
r
−
m
W
l
J
l
˙q
l
) (14)
where L
mc
and L
mp
are the interaction matrices cor-
responding to S
mc
and S
mp
. Their expressions are de-
tailed in appendix A.
3.2.3 The Jacobian Matrix of Each Subtask
Finally we can deduce that the jacobian of each sub-
task e
i
is given by:
J
i
= H
i
·
−L
mc
m
W
r
L
mp
m
W
l
L
mc
− L
mp
−L
f c
f
W
r
L
f p
f
W
l
0
3×6
·
J
r
0
6×7
0
6×7
J
l
J
5r
0
6×7
(15)
The control law corresponding to each subtask e
i
is then expressed as follows:
˙q
i
= −J
i
+
λ
i
e
i
(16)
with i = {1,2, 3}.
Multi-camerasVisualServoingtoPerformaCoordinatedTaskusingaDualArmRobot
41
3.3 Transition Between Tasks
We have defined three task functions. To recap the
pen, it is necessary to sequence them. In other words,
we need to sequence the control laws allowing to reg-
ulate them to zero, while preserving the smoothness
of the velocities applied to the robot.
This objective cannot be performed by consider-
ing the classical exponential decrease which is gener-
ally set to make the task function vanish. A first so-
lution to this problem has been proposed in (Soueres
et al., 2003). The idea is to impose a second order
linear dynamic to make the task function vanish.
¨e + α ˙e + βe = 0
Thanks to this choice, it is possible to define the ini-
tial conditions on e and ˙e so that the control law
smoothness is guaranteed. A year later, (Mansard and
Chaumette, 2004) have proposed a particular choice
for alpha and beta, leading to the following linear dif-
ferential equation:
¨e + (λ + µ) ˙e + λµe = 0
The main advantage of this solution is that it allows
to separately choose λ and µ. If µ > λ > 0, the system
is stable and the transient time is set only by µ. So, to
switch from a task e
i−1
to another task e
i
at t
i
, the real
control ˙q sent to the robot is given by the following
expression:
˙q(t) = ˙q
i
(t) − exp(−µ(t − t
i
))( ˙q
i
(t
i
) − ˙q(t
i
)) (17)
where ˙q
i
is the value computed by the formula (16)
and t
i
the switching time.
We switch from the current control law to the next
one when the norm of the current task function drops
below a given threshold.
4 SIMULATION RESULTS
We now present simulation results to validate our ap-
proach. A gaussian noise has been introduced on
the visual features (mean = 0, standard deviation =
2 pixels)
3
, on the joint coordinates q (mean = 0,
covariance = 7.6 × 10
−7
rad
2
) and on the veloci-
ties sent to the robot (mean = 0 rad/s, covariance =
7.6 × 10
−7
rad
2
/s
2
). The control law is updated at
15 Hertz rate. Both arms trajectory has been recorded
and played
4
using ROS
5
on the Gazebo simulator
6
.
3
The sensor has the size of 4.51mm × 2.88mm with a
focal length of 2.5mm and provides an image of 752 × 480
pixels.
4
A video is available on
http://homepages.laas.fr/rfleurmo/.
5
http://www.ros.org/
6
http://gazebosim.org/
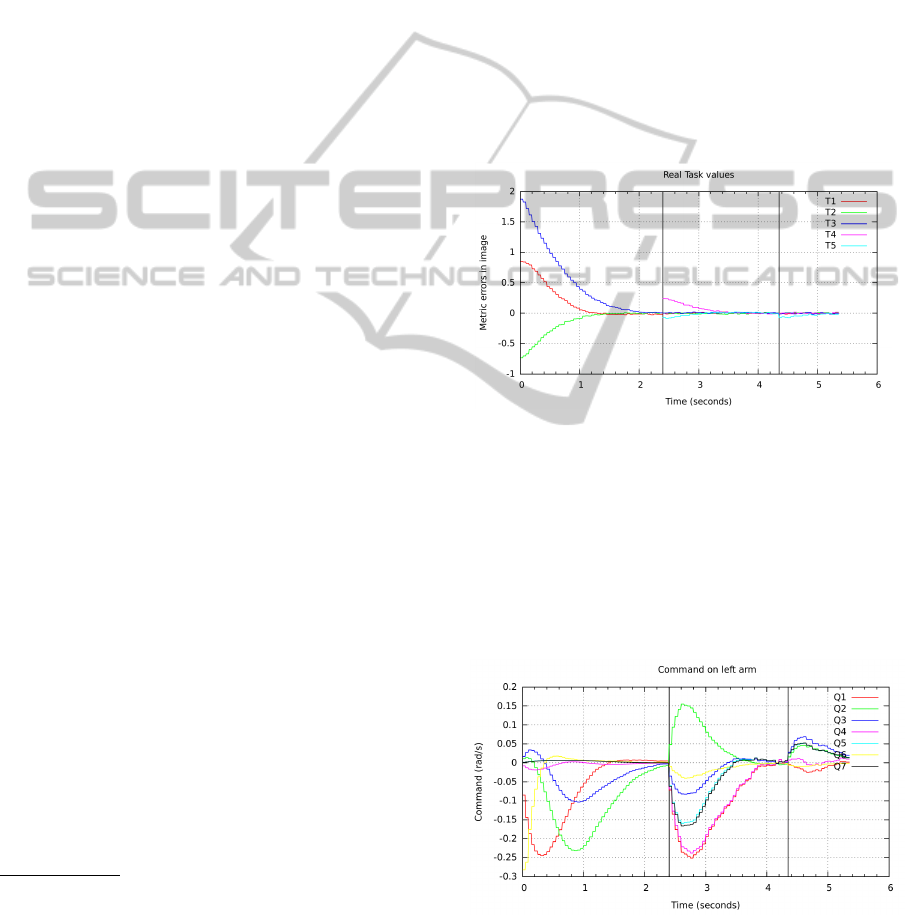
The evolution of the components T
i
of the three
task functions e
1
, e
2
and e
3
is presented on figure 5.
As we can see, all of them converge towards zero,
which shows that the corresponding tasks are success-
fully achieved. The first subtask e
1
is active between 0
and 2.4 s: in this interval T
1
, T
2
and T
3
are respectively
defined by ρ
mc
− ρ
mp
, θ
mc
− θ
mp
, and k
mc
− k
mp
− d.
At instant 2.4s, the norm of e
1
drops under a
threshold equal to 10
−2
, we start realizing the second
subtask. At this time, T
4
and T
5
are given by ρ
f c
−ρ
f p
and θ
f c
− θ
f p
. At t = 4.35s, the value of e
2
becomes
smaller than the chosen threshold and the last subtask
is launched. T
3
, T
4
and T
5
are then respectively de-
fined by ρ
f c
− ρ
f p
, θ
f c
− θ
f p
and k
mc
− k
mp
. The two
switching instants are shown by two black lines on
figure 5.
Figure 5: Evolution of the task function.
Figures 6 and 7 show the evolution of the veloc-
ities sent to the two arms. As we can see, the con-
trol inputs applied to each of them appear to be sim-
ilar, which shows that both arms move to achieve the
task and that the coordination between them is prop-
erly performed. These figures also demonstrate the
efficiency of our smoothness strategy, as no sudden
jumps is registered.
Figure 6: Control sent to the right arm.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
42
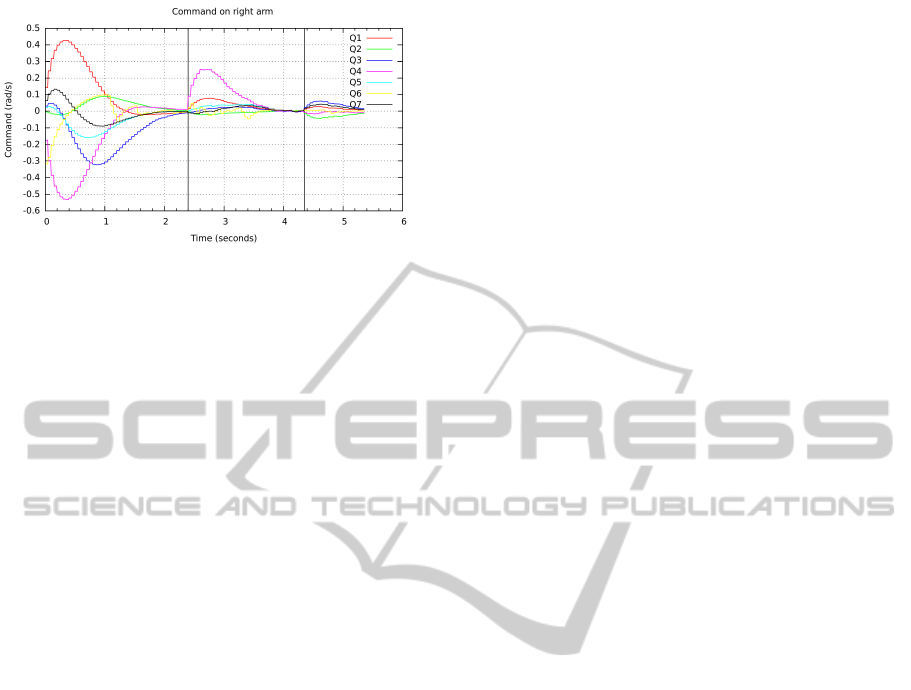
Figure 7: Control sent to the left arm.
5 CONCLUSION
In this paper, we have tackled the problem of coor-
dinating two manipulator arms from a control point
of view. We have proposed a vision-based control
strategy allowing to truly coordinate the motions of
a dual-arm robotic system. The task to be performed
has been described by a sequence of three subtasks.
Each of them is defined by visual features character-
izing the relative pose between the end effectors so
that a true collaboration between both arms has been
achieved. A multi-cameras image based visual ser-
voing has then been designed. Finally, the proposed
control strategy has been validated and the obtained
simulation results have demonstrated its interest and
its efficiency.
Now, to go further and improve our approach, it is
necessary to take into account the unexpected events
which may occur during the task and hamper its exe-
cution (e.g., joint limits, singularities, collisions, oc-
clusions, etc.). Therefore, our next step will be to ad-
dress this problem by taking advantage of the system
redundancy. In addition to these theoretical improve-
ments, we also plan to experimentally validate our ap-
proach on the LAAS PR2 robot and to perform more
complex coordination tasks.
REFERENCES
Adorno, B., Fraisse, P., and Druon, S. (2010). Dual posi-
tion control strategies using the cooperative dual task-
space framework. In Intelligent Robots and Systems
(IROS), 2010 IEEE/RSJ International Conference on,
pages 3955–3960.
Albrichsfeld, C. V. and Tolle, H. (2002). A self-adjusting
active compliance controller for multiple robots han-
dling an object. Control Engineering Practice,
10(2):165 – 173.
Berry, F., Martinet, P., and Gallice, J. (2000). Turning
around an unknown object using visual servoing. In
Intelligent Robots and Systems, 2000. (IROS 2000).
Proceedings. 2000 IEEE/RSJ International Confer-
ence on, volume 1, pages 257–262 vol.1.
Bonitz, R. and Hsia, T. (1996). Robust internal-force based
impedance control for coordinating manipulators-
theory and experiments. In Robotics and Automation,
1996. Proceedings., 1996 IEEE International Confer-
ence on, volume 1, pages 622–628 vol.1.
Caccavale, F., Ciro, N., Siciliano, B., and Villani, L. (2001).
Achieving a cooperative behavior in a dual-arm robot
system via a modular control structure. Journal of
Robotic Systems, 18(12):691–699.
Caccavale, F. and Uchiyama, M. (2008). Cooperative ma-
nipulators. In Siciliano, B. and Khatib, O., edi-
tors, Springer Handbook of Robotics, pages 701–718.
Springer Berlin Heidelberg.
Chaumette, F. (2002a). A first step toward visual servoing
using image moments. In Intelligent Robots and Sys-
tems, 2002. IEEE/RSJ International Conference on,
volume 1, pages 378–383 vol.1.
Chaumette, F. (2002b). La commande des robots manipu-
lateurs: Asservissement visuel, chapter 3, pages 101 –
151.
Chaumette, F. and Hutchinson, S. (2006). Visual servo con-
trol part 1: Basic approaches. IEEE Robotics and Au-
tomation Magazine, 13(4):82–90.
Dauchez, P., Fraisse, P., and Pierrot, F. (2005). A vi-
sion/position/force control approach for performing
assembly tasks with a humanoid robot. In 5th IEEE-
RAS International Conference on Humanoid Robots,
pages 277–282.
Espiau, B., Chaumette, F., and Rives, P. (1992). A new
approach to visual servoing in robotics. IEEE Trans-
actions on Robotics and Automation, 8(3):313–326.
Hynes, P., Dodds, G., and Wilkinson, A. J. (2006). Un-
calibrated visual-servoing of a dual-arm robot for mis
suturing. In The First IEEE/RAS-EMBS International
Conference on Biomedical Robotics and Biomecha-
tronics, pages 420–425.
Kermorgant, O. and Chaumette, F. (2011). Multi-sensor
data fusion in sensor-based control application to
multi-camera visual servoing. In IEEE International
Conference on Robotics and Automation, pages 4518–
4523.
Kraus, W., J. and McCarragher, B. J. (1997). Hybrid posi-
tion/force coordination for dual-arm manipulation of
flexible materials. In Intelligent Robots and Systems,
1997. IROS ’97., Proceedings of the 1997 IEEE/RSJ
International Conference on, volume 1, pages 202–
207 vol.1.
Mansard, N. and Chaumette, F. (2004). Tasks sequencing
for visual servoing. In Intelligent Robots and Systems,
2004. (IROS 2004). Proceedings. 2004 IEEE/RSJ In-
ternational Conference on, volume 1, pages 992–997
vol.1.
Miyabe, T., Konno, A., and Uchiyama, M. (2003). Auto-
mated object capturing with a two-arm flexible ma-
nipulator. In Robotics and Automation, 2003. Pro-
ceedings. ICRA ’03. IEEE International Conference
on, volume 2, pages 2529–2534 vol.2.
Multi-camerasVisualServoingtoPerformaCoordinatedTaskusingaDualArmRobot
43

P
´
erez, J. (1989). M
´
ecanique: points mat
´
eriels, solides, flu-
ides : avec exercices et probl
`
emes r
´
esolus. Enseigne-
ment de la physique. Masson.
Samson, C., Borgne, M. L., and Espiau, B. (1991). Robot
control: the task function approach. Oxford engineer-
ing science series. Clarendon Press.
Smith, C., Karayiannidis, Y., Nalpantidis, L., Gratal, X.,
Qi, P., Dimarogonas, D., and Kragic, D. (2012). Dual
arm manipulationa survey. Robotics and Autonomous
Systems, 60(10):1340 – 1353.
Soueres, P., Cadenat, V., and Djeddou, M. (2003). Dynam-
ical sequence of multi-sensor based tasks for mobile
robots navigation. 7th Symposium on Robot Control
(SYROCO’03), 2:423–428.
Uchiyama, M. and Dauchez, P. (1988). A symmetric hybrid
position/force control scheme for the coordination of
two robots. In Robotics and Automation, 1988. Pro-
ceedings., 1988 IEEE International Conference on,
pages 350–356 vol.1.
Vahrenkamp, N., Boge, C., Welke, K., Asfour, T., Walter,
J., and Dillmann, R. (2009). Visual servoing for dual
arm motions on a humanoid robot. In 9th IEEE-RAS
International Conference on Humanoid Robots, pages
208–214.
Watanabe, T., Harada, K., Jiang, Z., and Yoshikawa,
T. (2005). Object manipulation under hybrid ac-
tive/passive closure. In Robotics and Automation,
2005. ICRA 2005. Proceedings of the 2005 IEEE In-
ternational Conference on, pages 1013–1020.
Yamada, Y., Nagamatsu, S., and Sato, Y. (1995). Develop-
ment of multi-arm robots for automobile assembly. In
Robotics and Automation, 1995. Proceedings., 1995
IEEE International Conference on, volume 3, pages
2224–2229 vol.3.
Zheng, Y. and Chen, M. (1993). Trajectory planning for two
manipulators to deform flexible beams. In Robotics
and Automation, 1993. Proceedings., 1993 IEEE In-
ternational Conference on, pages 1019–1024 vol.1.
Zollner, R., Asfour, T., and Dillmann, R. (2004). Pro-
gramming by demonstration: Dual arm manipulation
tasks for humanoids robots. In IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems.
APPENDIX A
We briefly present the computation of the interac-
tion matrix corresponding to the above mentioned vi-
sual features. Using the well-known pinhole camera
model, it is possible to express the projection of a
point M on the image plane as follows:
x = f X/Z, y = f Y /Z
where f is the focal length, (x,y) the coordinates of
the projected point in the image and (X,Y,Z) the co-
ordinates of M with respect to the camera frame. The
expression of the interaction matrix of a point is given
by:
L
xy
=
− f /Z 0 x/Z xy/ f −( f + x
2
/ f ) y
0 − f /Z y/Z f + y
2
/ f −xy/ f −x
The interaction matrix L
ρθ
of a straight line described
by the parameter vector [ρ, θ]
T
has also already been
computed in (Chaumette, 2002b):
L
ρθ
=
−1 y
a
· cos(θ) − x
a
· sin(θ)
−1 y
b
· cos(θ) − x
b
· sin(θ)
−1
×
−cos(θ) −sin(θ) 0 0
0 0 −cos(θ) −sin(θ)
×
L
a
L
b
where L
a
and L
b
are the interaction matrices corre-
sponding to two distinct points A(x
a
,y
a
), B(x
b
,y
b
)
which belong to the line.
Finally, the interaction matrix L
k
relative to k can
be expressed using the previous formulas:
L
k
=
−sin(θ) cos(θ) 0 (−x
e
· cos(θ) − y
e
· sin(θ))
L
e
L
ρθ
where L
e
is the interaction matrix corresponding to
the point E.
The interaction matrix of the visual features vec-
tor, describing the cylinder is finally given by: L
cyl
=
L
ρθ
T
L
k
T
T
.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
44
