
Passivity Preserving Multipoint Model Order Reduction using Reflective
Exploration
Elizabeth Rita Samuel, Luc Knockaert and Tom Dhaene
Ghent University - iMinds, Gaston Crommenlaan 8 Bus 201, B-9050 Gent, Belgium
Keywords:
Model Order Reduction, Projection Matrix, Singular Values, Reflective Exploration, Passivity.
Abstract:
Reduced state-space models obtained by model order reduction methods must be accurate over the whole
frequency range of interest and must also preserve passivity. In this paper, we propose multipoint reduction
technique using reflective exploration for adaptively choosing the expansion points. The projection matrices
obtained from the expansion points are merged to form the overall projection matrix. In order to obtain a
more compact model the projection matrix is truncated based on its singular values. Finally, the reduced order
model is obtained, while ensuring that the passivity of the reduced system is preserved during the reduction
process.
1 INTRODUCTION
When analyzing and controlling large-scale systems,
it is extremely important to develop efficient
modeling procedures. The design of a controller for a
high-dimensional system may be too time-consuming
to implement in practice. In fact it is important that
the key dynamic elements be identified and spurious
dynamic elements eliminated. Model reduction
techniques provide an extremely effective way to
address this requirement.
Model order reduction (MOR) techniques are now
standard for reducing the complexity of large scale
models and the computational cost of the simulations,
while retaining the important physical features of
the original system (Feldmann and R. Freund, 1995;
Gallivan et al., 1996; Odabasioglu et al., 1998;
Knockaert and De Zutter, 2000; Freund, 2000;
Phillips et al., 2003; Phillips, 2004; Knockaert
et al., 2011). Existing approaches based on Krylov
subspaces are very efficient.
One of the main concerns regarding MOR
algorithms is that the model must be sufficiently
accurate not just at a single frequency point but
over a whole range of frequencies. This situation
typically arises when dealing with microwave
circuits. Reduction algorithms that address this
concern are the multipoint rational Krylov algorithm
(Gallivan et al., 1996; Silveira and Phillips, 2006;
Wang et al., 2012) and multipoint expansion using a
binary search (Ferranti et al., 2011), which are more
accurate but more expensive to set up.
Multipoint projections raise many practical
questions while implementation. In this paper, we
focus on three points namely;
• the order considered for each expansion point.
• adaptive frequency sampling using reflective
exploration (Beyer and
´
Smieja, 1996).
• obtaining a compact projection matrix.
In this paper, the projection matrices are computed
using the PRIMA technique (Odabasioglu et al.,
1998), which is known to be an efficient technique for
the reduction of large systems. The expansion points
are selected adaptively using a reflective exploration
technique. It is a sequential sampling algorithm,
where the model is improved incrementally using
the best possible data at every time step with
additional properties allowing it to propose candidate
exploration points (Beyer and
´
Smieja, 1996). An
error-based exploration is implemented to find the
expansion points. After obtaining the expansion
points the corresponding projection matrices are
computed using Krylov based MOR technique. The
projection matrices are then merged to obtain the
overall projection matrix. When the number of
expansion points increase, the merged projection
matrix also increases and might fail to provide a
satisfactory model dimension reduction. In this
paper, an adaptive truncation algorithm is proposed
to truncate the merged projection matrix based on its
singular values, thereby obtaining a more compact
483
Rita Samuel E., Knockaert L. and Dhaene T..
Passivity Preserving Multipoint Model Order Reduction using Reflective Exploration.
DOI: 10.5220/0005018804830491
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 483-491
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

reduced order model (ROM) which preserves the
system properties. Numerical results validate the
proposed technique.
2 BRIEF OVERVIEW OF
MULTIPOINT MOR
Here, the PRIMA algorithm (Odabasioglu et al.,
1998) is used for obtaining the projection matrices.
2.1 PRIMA
Consider a MIMO descriptor system of the form
E˙x(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t). (1)
The transfer function is
H(s) = C(sE− A)
−1
B+ D. (2)
Let s
0
be a suitably chosen expansion point such
that the matrix s
0
E − A is nonsingular. Then the
transfer function can be rewritten as:
H(s) = C(s
0
E− A+ (s− s
0
)E)
−1
B+ D
= C(I+ (s− s
0
)M)
−1
R+ D (3)
where M = (s
0
E− A)
−1
E, R = (s
0
E− A)
−1
B.
The q-th block Krylov-subspace is given by
K
q
(M,R) = colspan[R MR M
2
R ... M
(q−1)
R]. (4)
This yields the projection matrix V
q
, which is the
column orthogonal matrix computed from the Krylov
subspace K
q
(M,R), from which using congruence
transformation (5) the reduced state-space matrices
(A
q
,E
q
,B
q
,C
q
,D
q
) are obtained as:
A
q
= V
T
q
AV
q
, E
q
= V
T
q
EV
q
,
B
q
= V
T
q
B, C
q
= CV
q
, D
q
= D. (5)
2.2 Multipoint Projection Matrix
After model order reduction, the resulting model must
not only be accurate at a frequency point but over
the whole range of interest and must also preserve
passivity. For this the multipoint reduction algorithm
is used (Ferranti et al., 2011).
At each expansion point, the projection matrices
is computed as described in Section 2.1, i.e., for
N expansion points the corresponding projection
matrices V
q
i
(i = 1,2,... ,N) are merged to give;
V
comm
= colspan[V
q
1
V
q
2
... V
q
N
]. (6)
The merged projection matrix is not truncated
using its singular values during the iterative procedure
of the reflective exploration. But the matrix is
truncated after all the expansion points are adaptively
chosen which is described in the following section.
3 REFLECTIVE EXPLORATION
The process of selecting expansion points and
building the model in an adaptive way is referred
to as reflective exploration (Beyer and
´
Smieja,
1996). Reflectiveexploration is an effectivetechnique
when its very expensive to obtain the model from
Electromagnetic(EM) simulators. For the exploration
a reflective function is required to select a new
expansion point. The reflective function used for the
proposed multipoint MOR algorithm is the error norm
between the best model and the second best model.
As described in (Geest et al., 1999), the algorithm has
two loops: an adaptive modeling loop and an adaptive
sampling loop.
1. Adaptive Modeling Loop: The algorithm starts
with two expansion points selected at ω
min
and
ω
max
of the frequency range of interest. It should
be noted that the initial number of sample points
that is uniformly distributed along the frequency
range of interest can be varied as needed, if prior
knowledge of the system is available.
The reduced order q at these points is equal to
the number of input ports of the system. Then
the reduced model is obtained with a common
projection matrix as explained in Section 2. If the
RMS error (7) between the two best models (I
th
and (I − 1)
th
) is more than a threshold δ
mod
, then
the reduced order q is increased by the number of
input ports again for all the expansion points. In
this paper the threshold is chosen to be 10
−3
.
Err
(I)
est
=
v
u
u
t
∑
K
s
k=1
∑
P
in
i=1
∑
P
out
j=1
|
H
I,(ij)
(s
k
)−H
I−1,(i j)
(s
k
)
|
2
W
(ij)
(s
k
)
P
in
P
out
K
s
W
(ij)
(s
k
) = |H
I,(ij)
(s
k
)|
2
. (7)
Here, K
s
, P
in
and P
out
are the number of frequency
samples considered on a dense grid, input and
output ports of the system, respectively.
2. Adaptive Sampling Loop: When the difference
in RMS error (7), between the two consecutive
models is very small i.e.,
Err
(I)
est
− Err
(I−1)
est
Err
(I−1)
est
< δ
samp
(8)
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
484

Figure 1: Reflective Exploration.
(in this paper the difference is considered to be
less than 10%), then a new expansion point is
selected. For selecting the new expansion point,
the error per frequency is first computed by taking
the L1 norm of the frequency response of the best
model (H
I
) and the original model (H
act
), and
then the frequency at which Err
s
k
is maximum is
considered as the new expansion point.
Err
s
k
= kH
act)
(s
k
) − H
I
(s
k
)k;
k = 1, ...,K
s
. (9)
This process is iteratively repeated until the RMS
error between the original frequency response and the
reduced model is 10
−3
. Figure 1 shows a flowchart of
the reflective exploration algorithm.
4 MODEL COMPACTING
After obtaining the best reduced order model from
the iterative procedure, it might be possible to further
compact the model with the information obtained
from the singular values Σ (10) of the V
comm
(6).
The economy-size svd is computed for the
common projection matrix V
comm
(6), to obtain the
singular values Σ of the merged projection matrix. In
matlab the economy-sized svd is computed as shown:
UΣV
T
= svd(V
comm
,0) (10)
Here, U and V are orthogonal matrices, which
are known as the left and right singular values. The
diagonal of Σ gives the singular values of the system.
σ = diag(Σ). (11)
The reduced order for the system is defined based
on the first q
comm
significant singular values of V
comm
,
which is computed by adaptively setting a threshold
to the ratio of the singular values to the largest
singular value as shown in Fig.2. The ROM obtained
by the truncation of the merged projection matrix
with respect to the singular value, is compared with
the best model obtained from reflective exploration.
If the RMS error is less than 10
−4
, then we shall
truncate the singular values, else we keep the model
with the reduced order obtained using the reflective
exploration.
The compact projection matrix Q
comm
is equal
to the left singular value U where the column is
truncated to a size q
comm
based on the significance of
the singular values.
Q
comm
= U(:,1 : q
comm
). (12)
After truncation it can be noted that, on average
per expansion point an order of q
samp
(13) is required
to guarantee the desired accuracy at that expansion
point.
q
samp
= q
comm
/N. (13)
Here, n is the number of expansion points.
PassivityPreservingMultipointModelOrderReductionusingReflectiveExploration
485
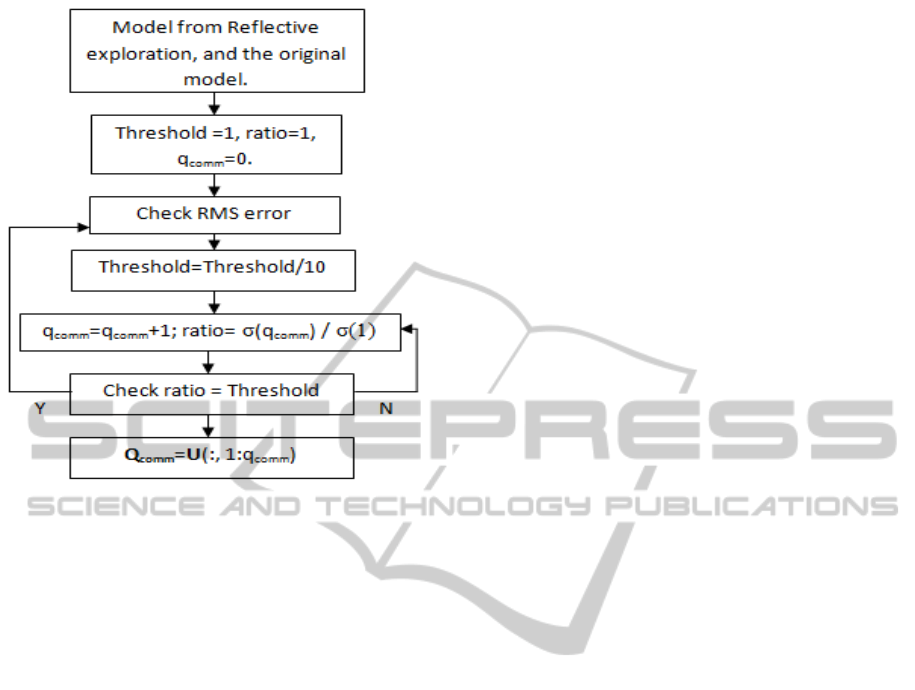
Figure 2: Truncation of the projection matrix.
Once the compact projection matrix Q
comm
is
computed, it is applied to the original system (1) and
a reduced system (5) is obtained through congruence
transformation.
5 PASSIVITY PRESERVATION
For transient behavior, stability and passivity are
the fundamental properties to be guaranteed by the
system, as known that, while a passive system is
also stable, the reverse is not necessarily true. A
passive system denotes a system that is incapable of
generating energy, and hence one that can only absorb
energy from the sources used to excite it (Anderson
and Vongpanitlerd, 1973). Passivity is an important
property to satisfy because stable, but not passive
macromodels can produce unstable systems when
connected to other stable, even passive, loads.
If the descriptor state space model in (1) satisfies
the following properties (Odabasioglu et al., 1998):
E = E
T
≥ 0
A+ A
T
≤ 0
B = C
T
, (14)
then it ensures the passivity of the admittance
model Y(s) = C(sE − A)
−1
B and with congruence
transformation the passivity of the model is preserved,
E
r
(g) = Q
comm
′
E(g)Q
comm
≥ 0
A
r
(g) = Q
comm
′
A(g)Q
comm
≤ 0
B
r
(g) = Q
comm
′
B(g)
C
r
(g) = Q
comm
C(g). (15)
If the system fails to have the state-space
properties described in (14) then the technique of
Linear Matrix Inequalities (LMI’s) (Knockaert et al.,
2011) has to be used, from which the solution
obtained fromLMI’s (Boyd et al., 1994; Gahinet and
Apkarian, 1993) gives a descriptor state space format
that preserves positive-realness and bounded realness
of the system.
Solving the LMI can be replaced by equivalently
solving an ARE, which is known to be a more efficient
approach (Gahinet et al., 1995; Balas et al., 2005)
as the number of operations required to solve a
Riccati equation is O(n
3
), while the cost of solving
an equivalent LMI is O(n
6
). Thus for high orders it is
advisable to solve using ARE as it is computationally
cheaper in comparison with LMI.
6 NUMERICAL RESULTS
Some pertinent numerical examples are used to
demonstrate the accuracy and efficiency of the
proposed technique. The numerical simulations were
performed on a Windows 7 platform on Intel
(R)
Core
(TM)
2 Duo P8700 2.53 GHz machine with 2 GB
RAM and has been implemented in Matlab R2012b.
6.1 Example 1: Lossy Transmission
Line
For this example, a 1 cm long two conductor lossy
transmission line with the following per-unit-length
matrices
r
pul
=
75 15
15 75
Ω/m
l
pul
=
494.6 63.3
63.3 494.6
nH/m
g
pul
=
0.1 0
0 0.1
S/m
c
pul
=
62.8 −4.9
4.9 62.8
pF/m. (16)
for a frequency range of [1 Khz− 1 GHz], is modeled
as described in (Knockaert and De Zutter, 2000). The
original state-space order of the system is 1202 with
4 ports.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
486
0 0.2 0.4 0.6 0.8 1
0
1
2
3
4
5
6
7
8
x 10
−3
norm(H
act
−H
I
)
Frequency (GHz)
max(Err
sk
=> new expansion point
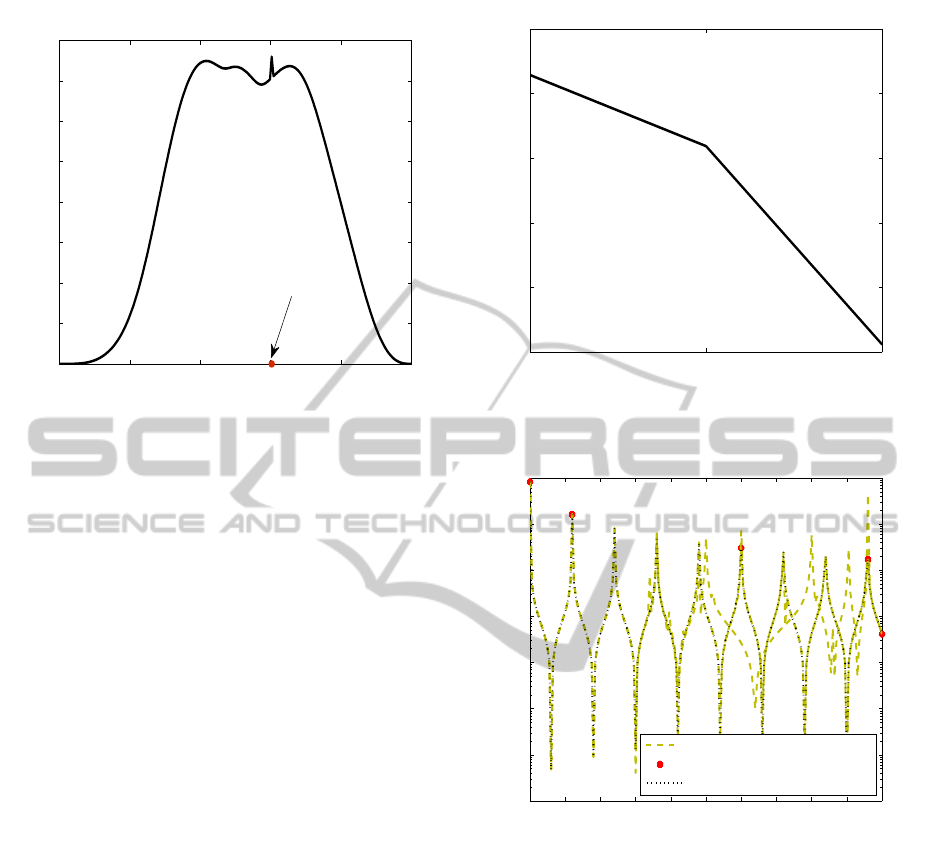
Figure 3: Example 1: Error per frequency used to select the
new expansion point for the adaptive sampling loop.
The sampling starts by considering two expansion
points at ω
min
and ω
max
. The reduced order for the
first iteration is equal to 4, the number of ports of the
system. Then, as briefed in Section 3, the frequency
responses is computed using a merged projection
matrix (6) formed from the two expansion points. For
the next iteration, the frequency response is computed
for the same expansion points with an increased order
of 8, i.e.: it is increased by the number of ports. Then
the difference in response between the two models
is computed using (7). The error obtained is 2.147,
which is significantly greater than 10
−3
, the threshold
set for the RMS error. Therefore, the algorithm
increases the order of the expansion points and again
computes the RMS error. Since the difference in the
RMS error in the successive iterations is less than
10%, the algorithm checks for the new expansion
point by computing the L1 norm of the best model
and the original model. As shown in Fig.3, the norm
of the frequency responses of the best model and the
actual response gives the error per frequency and the
new expansion point is considered at the frequency at
which the error is maximum.
Then, the frequency response which is the
admittance parameter Y(s), is again computed with
all the expansion points, with a reduced order of 12
per expansion point. Similarly in this manner the
sampling process is iterated till the RMS error (7) is
less than the 10
−3
, the accuracy threshold value set.
Figure 4 plots the RMS error (7) between the
iterated models when new expansion points are added
during reflective exploration.
Figure 5, shows the magnitude of the admittance
parameter Y
11
obtained during the reflective
1 2 3
0
0.5
1
1.5
2
2.5
Samples
RMS error
Figure 4: Example 1: RMS error between the iterated
models during the addition of new expansion points.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
10
−6
10
−5
10
−4
10
−3
10
−2
10
−1
10
0
10
1
Frequency (GHz)
|Y
11
| (S)
Model obtained during each iteration
Expansion points chosen adaptively
Final reduced order model
Figure 5: Example 1: Magnitude of Y
11
for each iteration
with the adaptively chosen expansion points.
exploration for different iterations. A best model of
dimension 96 is obtained with 4 expansion points
within a CPU time of 15.23 secs.
Then the model is compacted based on the
truncation of the singular values of the common
projection matrix. With the truncation algorithm
described in Section 4, we obtain a model of order 85
by adaptively choosing a threshold of 10
−4
in 0.715
secs as shown in Table 1.
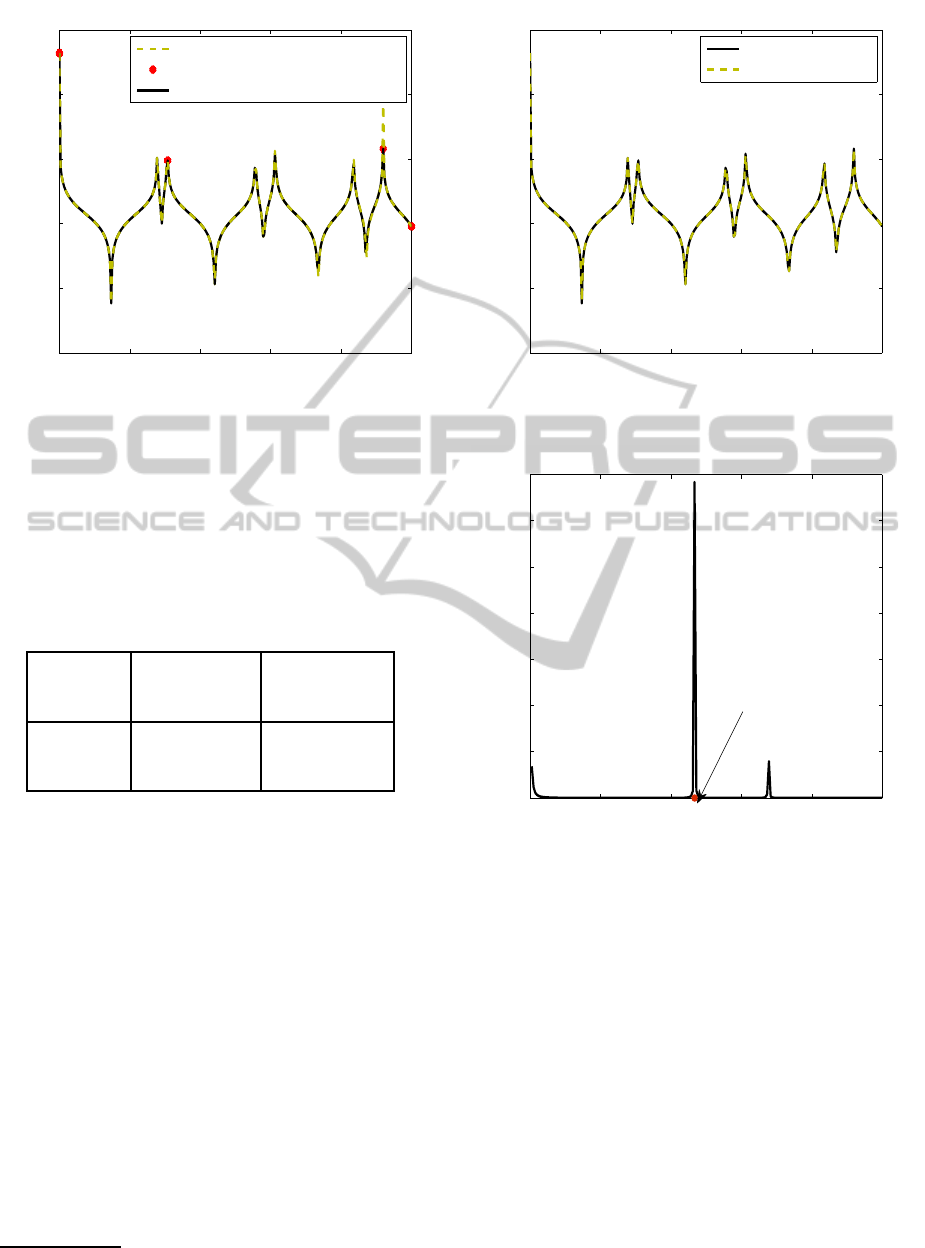
Figure 6 plots the magnitude of Y
11
for the
original and the reduced model using 4 expansion
points with a reduced order of 22 per expansion point.
PassivityPreservingMultipointModelOrderReductionusingReflectiveExploration
487

Table 1: Example 1: Adaptive truncation for model
compacting.
Threshold RMS Error Dimension of
ROM
10
−1
2.23× 10
−1
61
10
−2
1.703× 10
−1
71
10
−3
6.96× 10
−2
77
10
−4
9.72× 10
−4
85
0 0.2 0.4 0.6 0.8 1
10
−6
10
−5
10
−4
10
−3
10
−2
10
−1
10
0
10
1
Frequency (GHz)
|Y
11
| (S)
Original model
Reduced order model
Figure 6: Example 1: Magnitude of Y
11
after model
compacting.
6.2 Example 2: Lossless Transmission
Line
For this example, a 20 cm lossless uniform coupled
microstrip structure with two strips with the following
per-unit-length matrices (Khalaj-Amirhosseini,
2006),
l
pul
=
425.6 74.83
74.83 425.6
nH/m
c
pul
=
174.9 14.25
14.25 174.9
pF/m. (17)
for a frequency range of interest [1 KHz− 1 GHz], is
modeled. The original system has an order of 1604
with 4 ports.
Similar to Example 1, two expansion points at
ω
min
and ω
max
are considered. The reduced order for
the first iteration is equal to 4, the number of ports.
Then as briefed in Section 3, the frequency responses
are computed using a merged projection matrix (6).
Then similar to the previous case the difference in
0 0.2 0.4 0.6 0.8 1
0
5
10
15
20
25
Frequency (GHz)
norm(H
act
−H
I
)
max(Err
sk
) => new expansion point
Figure 7: Example 2: Error per frequency used to select the
new expansion point for the adaptive sampling loop.
1 2 3
2
4
6
8
10
12
14
16
Samples
RMS error
Figure 8: Example 2: RMS error between the iterated
models during the addition of new expansion points.
response between the two models (7) is computed
and as the error is bigger than the threshold set, the
algorithm checks for the next expansion point using
the adaptive sampling loop as shown in Fig.11.
Similarly in this manner the sampling process is
iterated till the RMS error (7) is less than threshold
value of 10
−3
.
Figure 8 plots the RMS error (7) of the best
two models during each iteration of the reflective
exploration algorithm.
Figure 12, shows the frequency responses
obtained during the reflective exploration for different
iterations. The best model has dimension 64 and is
obtained with 4 expansion points within a CPU time
of 14.8 secs.
Finally, the model is compacted based on the
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
488
0 0.2 0.4 0.6 0.8 1
10
−6
10
−4
10
−2
10
0
10
2
10
4
Frequency (GHz)
|Y
11
| (S)
Models obtained during each iteration
Expansion points considered
Final reduced order model
Figure 9: Example 2: Magnitude of Y
11
for each iterative
step with the adaptively chosen expansion points.
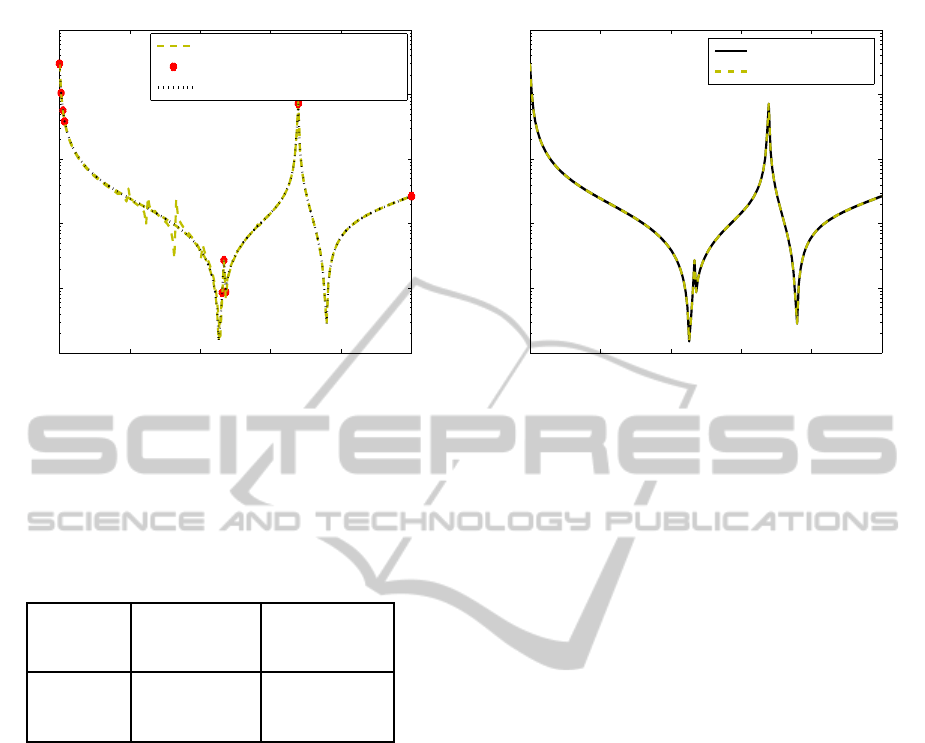
truncation of the singular values of the common
projection matrix. With the truncation algorithm
described in Section 4, we obtain a model of order
35 by adaptively choosing a threshold of 10
−2
in 0.16
secs as shown in Table 2.
Table 2: Example 2: Adaptive truncation for model
compacting.
Threshold RMS Error Dimension of
ROM
10
−1
8.04 29
10
−2
8.645× 10
−4
35
Figure 13 plots the magnitude of Y
11
for the
original and the reduced model using 4 expansion
points with a reduced order of 9 per expansion point.
6.3 Example 3: Modified Nodal
Analysis
A modified nodal analysis (MNA) formulation for a
22 port circuit as given in the Niconet benchmark
collections
1
is considered for this example. The
original system has an order of 4863 with 22 ports
for a frequency range of interest [1 KHz− 5 GHz].
Similar to the previous examples, two expansion
points at ω
min
and ω
max
are considered. The reduced
order for the first iteration is equal to 22, the number
of ports. Then as briefed in Section 3, the frequency
responses are computed using a merged projection
matrix (6). Then similar to the previous case the
1
http://www.win.tue.nl/niconet/niconet.html
0 0.2 0.4 0.6 0.8 1
10
−6
10
−4
10
−2
10
0
10
2
10
4
Frequency (GHz)
|Y
11
| (S)
Original model
Reduced order model
Figure 10: Example 2: Magnitude of Y
11
with the original
response after model compacting.
0 1 2 3 4 5
0
10
20
30
40
50
60
70
Frequency (GHz)
norm(H
act
−H
I
)
max(Err
sk
) => new
expansion point
Figure 11: Example 3: Error per frequency used to select
the new expansion point for the adaptive sampling loop.
difference in response between the two models (7) is
computed and as the error is bigger than the threshold
set, the algorithm checks for the next expansion point
using the adaptive sampling loop as shown in Fig.11.
Similarly in this manner the sampling process is
iterated till the RMS error (7) is less than threshold
value of 10
−3
.
Figure 12, shows the frequency responses
obtained during the reflective exploration for different
iterations. The best model has dimension 1122 and is
obtained with 9 expansion points within a CPU time
of 2048.5 secs.
Finally, the model is compacted based on the
truncation of the singular values of the common
projection matrix. As shown in Table 3, with the
PassivityPreservingMultipointModelOrderReductionusingReflectiveExploration
489
0 1 2 3 4 5
10
−4
10
−3
10
−2
10
−1
10
0
10
1
Frequency (GHz)
Y
11
(S)
Models obtained during each iteration
Expansion points chosen asaptively
Final reduced order model
Figure 12: Example 2: Magnitude of Y
11
for each iterative
step with the adaptively chosen expansion points.
truncation algorithm described in Section 4, we obtain
a model of order 202 by adaptively choosing a
threshold of 10
−2
in 4.38 secs.
Table 3: Example 3: Adaptive truncation for model
compacting.
Threshold RMS Error Dimension of
ROM
10
−1
15.09 88
10
−2
2.645× 10
−3
202
Figure 13 plots the magnitude of Y
11
for the
original and the reduced model using 9 expansion
points with a reduced order of 22 per expansion
point..
From the examples described it can be illustrated
that the proposed technique is able to capture
the behavior of the system accurately and is able
to preserve passivity of the original model by
construction.
7 CONCLUSION
For model order reduction its important that the
model is accurate over the whole frequency range of
interest and must also preserve passivity. Passivity
preservation is important since that interconnection
of merely stable systems does not necessarily yield
a stable system, while interconnection of passive
systems yield a passive and hence stable system. In
the literature several multipoint reduction algorithms
with passivity preservation has been proposed to
0 1 2 3 4 5
10
−4
10
−3
10
−2
10
−1
10
0
10
1
Frequency (GHz)
|Y
11
| (S)
Original model
Reduced order model
Figure 13: Example 3: Magnitude of Y
11
with the original
response after model compacting.
overcome this. In this paper, the adaptive selection
of expansion point is based on a reflective exploration
technique. The projection matrices obtained from
the expansion points are merged to obtain the overall
projection matrix for the system. To get a more
compact model the merged projection matrix is
truncated based on its singular values. Reduced order
models are obtained by a congruence transformation,
which preserves the passivity the system. The
numerical examples validate the proposed technique.
ACKNOWLEDGEMENTS
This work was supported by the Research
Foundation Flanders (FWO-Vlaanderen) and by
the Interuniversity Attraction Poles Programme
BESTCOM initiated by the Belgian Science Policy
Office.
REFERENCES
Anderson, B. and Vongpanitlerd, S. (1973). Network
Analysis and Synthesis. Prentice-Hall, Englewood
Cliffs, NJ.
Balas, G., Chiang, R., Packard, A., and Safonov, M.
(2005). Robust Control Toolbox User’s Guide. The
MathWorks, Inc., Version 3.
Beyer, U. and
´
Smieja, F. (1996). Data exploration with
reflective adaptive models. Computational Statistics
& Data Analysis, 22(2):193 – 211.
Boyd, S., El Ghaoui, L., Feron, E., and Balakrishnan,
V. (1994). Linear matrix inequalities in system and
control theory.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
490

Feldmann, P. and R. Freund, W. (1995). Efficient
linear circuit analysis by Pad`e approximation via
the Lanczos process. IEEE Transactions on
Computer-Aided Design of Integrated Circuits and
Systems, 14(5):639–649.
Ferranti, F., Nakhla, M., Antonini, G., Dhaene, T.,
Knockaert, L., and Ruehli, A. (2011). Multipoint
full-wave model order reduction for delayed peec
models with large delays. IEEE Transactions on
Electromagnetic Compatibility, 53(4):959–967.
Freund, R. W. (2000). Krylov-subspace methods for
reduced-order modeling in circuit simulation. J.
Comput. Appl. Math., 123:395–421.
Gahinet, P. and Apkarian, P. (1993). An LMI-based
parametrization of all H
∞
controllers with
applications. Proceedings of the 32nd Conference on
Decision and Control, pages 656–661.
Gahinet, P., Nemirovski, A., Laub, A., and Chilali, M.
(1995). LMI Control Toolbox User’s Guide. The
MathWorks, Inc., Version 1.
Gallivan, K., Grimme, G., and Dooren, P. (1996). A rational
Lanczos algorithm for model reduction. Numerical
Algorithms, 12(1):33–63.
Geest, J. D., Dhaene, T., Fach, N., and Zutter, D. D. (1999).
Adaptive CAD-model building algorithm for general
planar microwave structures. IEEE Transactions on
Microwave Theory and Techniques, 47(9):1801–1809.
Khalaj-Amirhosseini, M. (2006). Progress in
electromagnetics research. 60:107–117.
Knockaert, L. and De Zutter, D. (2000). Laguerre-SVD
reduced-order modeling. IEEE Transactions on
Microwave Theory and Techniques, 48(9):1469–1475.
Knockaert, L., Dhaene, T., Ferranti, F., and Zutter, D. D.
(2011). Model order reduction with preservation
of passivity, non-expansivity and Markov moments.
Systems & Control Letters, 60(1):53–61.
Odabasioglu, A., Celik, M., and Pileggi, L. (1998).
PRIMA: passive reduced-order interconnect
macromodeling algorithm. IEEE Transactions
on Computer-Aided Design of Integrated Circuits and
Systems, 17(8):645–654.
Phillips, J. (2004). Variational interconnect analysis via
PMTBR. pages 872 – 879.
Phillips, J., Daniel, L., and Silveira, L. (2003). Guaranteed
passive balancing transformations for model order
reduction. IEEE Transactions on Computer-Aided
Design of Integrated Circuits and Systems, 22(8):1027
– 1041.
Silveira, L. and Phillips, J. (2006). Resampling
plans for sample point selection in multipoint
model-order reduction. Computer-Aided Design of
Integrated Circuits and Systems, IEEE Transactions
on, 25(12):2775–2783.
Wang, H., Tan, S. X.-D., and Rakib, R. (2012).
Compact modeling of interconnect circuits over wide
frequency band by adaptive complex-valued sampling
method. ACM Trans. Des. Autom. Electron. Syst.,
17(1):5:1–5:22.
PassivityPreservingMultipointModelOrderReductionusingReflectiveExploration
491
