
Task Level Optimal Control of a Simulated Ball Batting Robot
Dennis Sch
¨
uthe and Udo Frese
Multi-Sensor Interactive Systems Group, University of Bremen, Enrique-Schmidt-Str. 5, Bremen, Germany
Keywords:
Optimal Control, Finite Horizon, LQR, Affine System, Entertainment Robot, Redundancy, Flexible Joints.
Abstract:
We developed a task-oriented controller based on optimal finite horizon control. We demonstrate this on a
flexible ball playing robot with redundant degrees of freedom. The task is to reach a specified Cartesian po-
sition and velocity of the bat at a specified time, in order to rebound the ball. The controller must maintain
high accuracy and react to disturbances and changing conditions. Therefore, we formulate this as an optimal
control problem giving the controller the possibility to autonomously distribute motor torques amongst the re-
dundant degrees of freedom. In simulations, we show the accuracy of the controller, the intelligent distribution
of motor torques, as well as robustness against disturbances and adaptation to changing conditions.
1 INTRODUCTION
Targeted ball hitting poses a great challenge to the hu-
man bio-physical system. From perception of the ball
to the exact hitting-time many steps have to be pro-
cessed. Herein the “control” of muscles to trigger the
bat precisely to the predicted position with appropri-
ate speed has a crucial role in playing the ball back. In
performing this action, it would seem that the human
brain solves an optimal control problem. Our goal is
to achieve something similar on a ball playing enter-
tainment robot (Figure 1 ). Therefore, we developed
an optimal finite horizon controller handling the task
of being at a specified time in a specified position with
a specified velocity.
1.1 System
Our robot is a 2.1 m tall ball playing entertainment
robot called “Doggy”. It hits balls with its head,
which consists of a 40cm styrofoam sphere fitted to a
carbon rod. The rod is attached to three revolute joints
having one common point where their rotational axes
intersect (Figure 2). The first axis is acting like a hip,
giving the robot a redundant degree of freedom (DOF)
with the intention to make it more agile. Thus, the
end-effector (EOF) moves on a sphere (actually par-
tially due to joint limits) and we have three redundant
joints to control the 2 DOF. As the end-effector (bat)
is a sphere the orientation does not matter. Further-
more, our stereo camera is mounted after the first axis
allowing it to turn and change the viewing direction.
Figure 1: The 2.1 m tall ball playing entertainment robot
“Doggy”.
The joints are driven by DC motors through tooth
belts, resulting in elasticity, which needs to be taken
into account by the controller.
1.2 Problem Statement
The problem is to be at a specified time T in a spec-
ified position p with a specified velocity v with the
centre of the robots head to play back a thrown ball.
The cost of doing so should be brought to a minimum,
i. e. the reduction of the motors torque. Thus, the re-
45
Schüthe D. and Frese U..
Task Level Optimal Control of a Simulated Ball Batting Robot.
DOI: 10.5220/0005026100450056
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 45-56
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 2: Interior of “Doggy” consisting of three revolute
joints. Their rotational axes intersect in one point leading to
redundancy. The bat, consisting of a sphere (Doggy’s head)
attached to a rod, is not shown.
dundancy should be intelligently used to distribute the
task to all joints. Moreover, the position, velocity and
time specification is needed for a controlled play back
game and the robot has to comply to all three accu-
rately. We want a single controller fulfilling this task
of trajectory planning and intelligent distribution of
motor torques and joint angles to reach the goal po-
sition and velocity in time. Thus, we describe this
process as task level optimal control (TLOC).
Figure 3 shows the basic idea of the controllers
implementation on the system. As input parameters
the controller uses the actual state vector x consist-
ing of velocities and positions of motors and joints.
Moreover, it needs the goal parameters T , p and v
from a ball tracking algorithm to compute the optimal
policy. The policy is then combined with the state
vector and results to a torque control vector u. We
want to clarify that the detection of the goal parame-
ters as well as the tracking is not part of this paper.
1.3 Contribution
We combine trajectory planning and controlling in a
single controller using finite horizon optimal control.
The point we want to make in this paper, is that for
this task or similar tasks involving something to be
fulfilled at a given time, it is both elegant and practical
to formulate the task as an optimal control problem.
In particular the approach has the following benefits:
• Automatic utilisation of redundancy
• Automatic generation of optimal motion
• Appropriate reaction on disturbances depending
on time (unlike trajectory planning plus position
control)
• Computation of an optimal (time dependent)
closed loop gain matrix (as opposed to an optimal
trajectory or optimal commands)
D
A
D
A
Optimal
Controller
u
x
Ball Tracking
and
Prediction
p, v, T
Figure 3: System overview of the controllers task bring-
ing the robots head in time T to a specified position p with
velocity v. The controller provides an optimal torque u to
fulfil this task. In Section 5.6 we will reconfigure this layout
to a chained implementation.
2 RELATED WORK
Most recently the motion planning described in
(Goretkin et al., 2013) is strongly related to our ap-
proach; although both have been independently devel-
oped. A finite time linear quadratic regulator (LQR)
is used together with RRT* to find optimal solutions
to planning problems. We have in common the fi-
nite horizon LQR, where the time is an additional in-
put parameter. The difference is that we provide an
independent feedback controller gain, whereas they
provide a trajectory to follow. The best trajectory is
found by iterate through all possible trajectories. This
is time consuming, which is neither applicable nor
necessary for the ball batting task as it does not in-
clude obstacles.
In (Perez et al., 2012) the feedback gain is com-
puted additionally to the cost matrix, but not explicitly
taken as controller gain. (Reist and Tedrake, 2010)
provides a control-policy look up table of feedback
stabilised trajectories, which all lead to the goal state,
by simulation-based LQR-Trees.
A lot of work concerning ball hitting tasks focuses
on learning strategies (Kober et al., 2010; Muelling
et al., 2013), where basic movements are learned by
teach in and later adapted to the situation, or are based
on trajectory planning in conjunction with a joint con-
troller to follow them as described in (Senoo et al.,
2006; Hu et al., 2010; Zhang and L, 2007; Nakai
et al., 1998).
Except for the volleyball robot of (Nakai et al.,
1998), all have the camera system separated from the
robot and they use industrial robots, which provide a
position interface, such that the focus is more on the
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
46

trajectory planning than on the controlling itself. The
volleyball robot is more designed as an entertainment
robot focusing on sport interaction playing balls back
to the opponent. But it is fixed to a specific court in a
hall, which provides constant conditions leading to a
simplified controller.
The previous version of our robot (Laue et al.,
2013) is not fixed to a dedicated environment and is
able to hit balls by moving to the predicted position,
but not with a specified velocity, so it can only inter-
cept and not play back.
In the following we describe the robot model with
its task space and limitations. Furthermore, we ex-
plain the dynamic programming procedure for the
optimal control process, followed by simulation ex-
periments. At the end we give a conclusion and an
overview about our future work.
3 MODEL
After giving an overview of the task, to rebound a ball
by controlling the EOF position such that it reaches
a goal position and velocity, we describe the model
of the robot our simulation and control algorithm is
based on. First rigid body kinematics and dynamics
are provided and later extended to the flexible joint
case. We also mention the restrictions made.
3.1 Kinematics
The Kinematics describes the EOF position in 3D
world coordinates of the robot system using transla-
tion and rotation of each joint. Due to the intersecting
axes there is no translation between joints. Thus, the
position of the EOF is
f
kin
(q) = T
0
1
+ R
0
1
(q
1
)R
1
2
(q
2
)R
2
3
(q
3
)T
3
EOF
. (1)
Where q = (q
1
q
2
q
3
)
T
is the joint angle vector,
T
0
1
and T
3
EOF
are the translations from first coordi-
nate system to world coordinates and EOF to third
coordinate system respectively. The rotations are
R
0
1
(q
1
), R
1
2
(q
2
) and R
2
3
(q
3
) for first, second and third
joint rotation. For our robot this results to
f
kin
(q) =
(c
1
s
2
c
3
−s
1
s
3
)0.9m
(c
1
s
3
+ s
1
s
2
c
3
)0.9m
c
2
c
3
0.9m +1 m
, (2)
where c
1
is cosq
1
, s
1
is sinq
1
, etc.
Having a sphere as bat, we can ignore the orienta-
tion of the end-effector.
Figure 4: “Doggy” kinematics and dynamics model with
coordinate systems, where red, green, blue is the x, y and z
coordinate respectively. The world coordinate system is on
the ground in the centre of the robot.
3.2 Dynamics
We derive the dynamics for our robot in two steps.
First we create the spatial vector notation (Feather-
stone, 2008; Featherstone, 2010), which we can plug
into the Matlab library Spatial v2 by (Featherstone,
2012). Therefore, we have to provide the connectiv-
ity graph, the geometry – which describes the trans-
lation and rotation, the joint type (revolute, prismatic,
helical) and the spatial inertia for each body.
We approximated the inertia matrices using sim-
ple geometry (Figure 4) and masses from a CAD
model. Most relevant for the controller is the bat mass
of 0.9 kg.
In the second step we obtain the equations of mo-
tion in the joint space form
M(q)
¨
q +c(q,
˙
q) +τ
g
(q) = τ
m
, (3)
where M(q), c(q,
˙
q), τ
g
(q) and τ
m
are the joint space
inertia, Coriolis and centrifugal terms, gravitational
terms and motor torques respectively. The notation
for the joint angles, velocities and accelerations is q,
˙
q and
¨
q (Siciliano and Khatib, 2008).
To obtain the Coriolis and gravitational terms, we
use the inverse dynamics of the Spatial v2 library to-
gether with the symbolic toolbox of Matlab and set-
ting the acceleration
¨
q to zero. The remaining joint
space inertia is provided by the composite-rigid-body
algorithm (Featherstone, 2010).
3.3 Elastic Joints
Our robot has relevant elasticities in the joints which
are mainly due to the tooth belt gear. Therefore,
we have to enhance the equation of motion (3) by
TaskLevelOptimalControlofaSimulatedBallBattingRobot
47

the elastic joint model, where motor angle, veloc-
ity and acceleration are described by θ
θ
θ,
˙
θ
θ
θ and
¨
θ
θ
θ re-
spectively (Siciliano and Khatib, 2008; Spong, 1995;
Albu-Schaeffer et al., 2007).
The coupling between motor and joint is the tooth
belt, which can be approximated by a spring with
stiffness K and a damping D. In the following we
set the damping D to zero, which is the worst case.
M(q)
¨
q +c(q,
˙
q) +τ
g
(q) +K (q −θ
θ
θ) = 0 (4)
B
¨
θ
θ
θ +K (θ
θ
θ −q) = τ
m
(5)
Where B and τ
m
are motor inertia and torque trans-
formed to the joint side with the gear ratio n
G
=
689
36
by
B = n
2
G
B
motor
, (6)
τ
m
= n
G
τ
motor
. (7)
We stack the dynamics into a nonlinear state space
representation
˙
x = f
dyn
(x,u), defining the state vector
x, the input vector u and the function f
dyn
(x,u) as
x =
q
T
˙
q
T
θ
θ
θ
T
˙
θ
θ
θ
T
T
, (8)
u = τ
m
, (9)
f
dyn
(x,u) =
˙
q
−M(q)
−1
(
c(q,
˙
q)+τ
g
(q)+K(q−θ
θ
θ)
)
˙
θ
θ
θ
−B
−1
K(θ
θ
θ−q)+B
−1
τ
m
, (10)
which we use for our optimal control problem.
Not modeled. At the moment we ignore constraints
of joint angles and motor torques, as well as friction.
4 TASK LEVEL OPTIMAL
CONTROL
Having the robot model, kinematics of the EOF and
the equations of motion derived in the last section, we
now want to formulate our task of being at a desired
position with given speed in specified time, as a fi-
nite horizon optimal control problem. The principle
will be explained at first. Furthermore, we explain the
control parameters.
4.1 Finite Horizon Controller
The principle of a finite horizon controller is to min-
imise a cost function in the time interval [0, T ], by
finding an optimal policy, i. e. mapping from (x,t) 7→
u. The cost function consists of costs during the pro-
cess time, depending on state and command, and a
final cost, where only the state contributes to the cost.
This is due to the finite time horizon, as the optimal
command in the last step is u = 0 and any other com-
mand would increase the cost. The general cost func-
tion is:
cost(x,u) = cost
f
(x(T )) +
T
Z
0
cost(x(t), u(t))dt.
(11)
For our optimal control problem we define the fi-
nal cost in dependency of the position p and the ve-
locity v. The process costs are then dependent on
the input torque and additionally on elastic vibrations
which are penalised.
cost(x,u) = cost
p
(x(T )) + cost
v
(x(T ))+
T
Z
0
[cost
vib
(x(t)) + cost
τ
(u(t))] dt
(12)
In the following the cost functions will be derived and
explained independently.
4.2 Cartesian Position
The position cost function formalises “be at position
p at time T ”. The Cartesian position of the EOF is
calculated by Equation (2). We define a new function
to penalise the quadratic deviation of actual system
position to a desired goal point p in world coordinates.
Hence, the position penalty is
cost
p
(x) = q
p
( f
kin
(q) −p)
2
, (13)
where q
p
is the penalisation parameter. The desired
point can have any value in 3D space, if it is not reach-
able by the EOF, the distance to it will be minimised.
4.3 Cartesian Velocity
The velocity cost function formalises “have velocity
v at time T ”. Considering our goal to reach a desired
position with a given velocity, we can apply a similar
penalisation as for the position to the velocity. Thus,
we need the derivative of the kinematics with respect
to time
f
vel
(q,
˙
q) =
∂ f
kin
(q)
∂t
=
∂ f
kin
(q)
∂q
˙
q. (14)
We construct the velocity penalty by penalising
the quadratic velocity difference from the desired ve-
locity v in Cartesian coordinates:
cost
v
(x) = q
v
( f
vel
(q,
˙
q) −v)
2
. (15)
Only velocities in the tangential plane of the sphere’s
workspace can be achieved, for v outside that plane
the difference is minimised. Note, that because the
tangential plane depends on p, this will result in a
compromise between p and v and leading to an in-
crease of cost.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
48

4.4 Vibration Reduction
The vibration reduction cost function formalises “os-
cillation is unwanted”. The flexible joint system tends
to oscillate in the spring (q −θ
θ
θ). We want the con-
troller to avoid this by penalising spring motion. So
cost
vib
(x) = q
vib
˙
q −
˙
θ
θ
θ
2
(16)
is the overall vibration reduction penalisation.
4.5 Motor Torque
The motor torque cost function formalises “minimal
effort”. We define a cost function that penalises the
squared input torque by a factor r
τ
. This is a canon-
ical choice of actuation costs, favours torques evenly
distributed over time and also corresponds to heat dis-
sipation of the DC-motor which we want to minimise.
cost
τ
(u) = r
τ
u
2
(17)
5 DYNAMIC PROGRAMMING
The previously defined model and cost functions will
now be applied to compute the optimal control policy
expressed as a feedback gain matrix K
n
. Therefore,
we use dynamic programming to compute the optimal
control policy by backward induction. It starts with
the final cost cost
f
= cost
p
(x(T )) + cost
v
(x(T )). For
each time-step T
s
it computes the effective cost of the
previous time-step as a function of that state x(T −T
s
)
by finding the x(T −T
s
) dependent optimal control
u(T −T
s
). This process goes back from x(T ) to x(0).
The case of dynamic programming we use here is
known as the finite horizon linear quadratic regulator
(Sontag, 1990). An advantage is the automatic com-
putation of the feedback gain matrix. Moreover, it is
a step by step method and can be easily adapted to
discrete systems with sample time T
s
controlled by an
LQR.
The LQR is based on a linear discrete system dy-
namics
x
n+1
= A
n
x
n
+ B
n
u
n
, (18)
u
n
= K
n
x
n
, (19)
where A and B denote the system and input matrix re-
spectively and n = t/T
s
is the discrete step time, which
is always an integer.
To integrate our system description derived in the
last sections into the dynamic programming algorithm
using a linear quadratic regulator, we first have to lin-
earise our system and afterwards discretise it to match
into (18).
5.1 Linearisation
The equations of motion describe a nonlinear dy-
namic function f
dyn
(x,u). As mentioned the LQR is
working only on linear systems, we need to linearise
Equation (10). We do this by deriving the first order
Taylor series around some linearisation point x
∗
and
u
∗
such that
f
lin
(x,u) = f
dyn
(x
∗
,u
∗
) +
∂ f
dyn
(x
∗
,u
∗
)
∂x
(x −x
∗
) +
∂ f
dyn
(x
∗
,u
∗
)
∂u
(u −u
∗
)
(20)
is the linear system approximation. Determining the
linearisation points x
∗
and u
∗
will be discussed later.
As we can see in this Equation, we have a constant
term
c = f
dyn
(x
∗
,u
∗
)−
∂ f
dyn
(x
∗
,u
∗
)
∂x
x
∗
−
∂ f
dyn
(x
∗
,u
∗
)
∂u
u
∗
,
(21)
which is not handled in (18). To make use of Equa-
tion (18), we can combine first and zero order terms
into a single matrix. Thus, we get an affine notation
(Goretkin et al., 2013), such that the resulting affine
notation with
˙
x = f
lin
(x,u) =
¯
A
¯
x +
¯
Bu, (22)
will later fit into (18) after discretisation, where
¯
x =
x
T
1
and the matrices
¯
A and
¯
B are
¯
A =
A c
0 0
=
∂ f
dyn
(x
∗
,u
∗
)
∂x
c
0 0
!
, (23)
¯
B =
B
0
=
∂ f
dyn
(x
∗
,u
∗
)
∂u
0
!
. (24)
We apply the same process of linearisation to ob-
tain the costs. Thus we combine (13) and (15) to
cost
f
= cost
p
+ cost
v
such that we get the final cost
cost
f
(x) =
f
pv
(x,p,v)
z }| {
f
kin
(x)−p
f
vel
(x)−v
T
W
f
z}|{
q
p
I 0
0 q
v
I
f
kin
(x)−p
f
vel
(x)−v
, (25)
where I denotes the identity matrix.
Then we linearise f
pv
(x,p,v) around x
∗
and ob-
tain
¯
J
f
=
J
f
c
fpv
=
∂ f
pv
(x
∗
,p,v)
∂x
f
pv
(x
∗
,p,v) −
∂ f
pv
(x
∗
,p,v)
∂x
x
∗
(26)
and the linearised function
f
pvlin
(x,p,v) =
¯
J
f
¯
x. (27)
TaskLevelOptimalControlofaSimulatedBallBattingRobot
49

To get the final cost in linearised form, we first have
to build the square of Matrix
¯
J
f
and penalise it by W
f
,
resulting to the penalisation matrix
¯
Q
f
=
¯
J
T
f
W
f
¯
J
f
=
J
T
f
W
f
J
f
J
T
f
W
f
c
fpv
c
T
fpv
W
f
J
f
c
T
fpv
W
f
c
fpv
. (28)
Finally, we have to multiply the final penalisation ma-
trix
¯
Q
f
by the squared state affine vector
¯
x, giving us
the final linearised cost
cost
flin
(x) =
¯
x
T
(T )
¯
Q
f
¯
x(T ). (29)
For the vibration reduction cost we can do the
same linearisation as for the final cost. Hence, we
have
cost
vib
(x) = (
f
vib
(x)
z}|{
˙
q −
˙
θ
θ
θ
)
T
W
z}|{
q
vib
I(
˙
q −
˙
θ
θ
θ
). (30)
Linearising f
vib
(x) around x
∗
results in
¯
J =
J c
vib
=
∂ f
vib
(x
∗
)
∂x
f
vib
(x
∗
) −
∂ f
vib
(x
∗
)
∂x
x
∗
.
(31)
The vibration penalisation
¯
Q in linearised form is then
¯
Q =
¯
J
T
W
¯
J =
J
T
WJ J
T
Wc
vib
c
T
vib
WJ c
T
vib
Wc
vib
, (32)
which gives us the linearised vibration cost
cost
viblin
(x) =
¯
x
T
(t)
¯
Q
¯
x(t). (33)
For the torque cost in linearised form we can write
the result directly as a squared linear function of the
penalty. Thus, the cost is
cost
τ
= u
T
(t)
R
z}|{
r
tau
I u(t), (34)
where R is the penalisation matrix of the input torque.
5.2 Discretisation
By now we have a linearisation of our continuous sys-
tem model. We now have to discretise it to fit into
(18). The discretisation of a first order differential
equation
˙
z = Fz (35)
can be solved by using the approach
F
n
= e
FT
s
, (36)
where T
s
is the sample time and e
FT
s
is the matrix ex-
ponential (Berg et al., 2011). The result is the discrete
system
z
n+1
= F
n
z
n
. (37)
Adapting (37) with F =
¯
A
¯
B
0 0
and z =
¯
x
T
u
T
T
and moreover using a first order Taylor series approx-
imation for the matrix exponential we get the discrete
system
¯
A
n
¯
B
n
0 I
= I +FT
s
≈ e
FT
s
, (38)
in the form of (18).
5.3 Feedback Gain
The computation of the feedback gain
¯
K
n
can be done
recursively backward in time using dynamic program-
ming, as explained in (Sontag, 1990). Therefore, the
cost function
cost(x,u) =
¯
x
T
N
¯
Q
f
¯
x
N
+
N−1
∑
n=0
¯
x
T
n
¯
Q
¯
x
n
+ u
T
n
Ru
n
, (39)
is minimised leading to the algebraic discrete Riccati
Equation
¯
P
n
=
¯
Q +
¯
A
T
n
¯
P
n+1
¯
A
n
−
¯
A
T
n
¯
P
n+1
¯
B
n
(R +
¯
B
T
n
¯
P
n+1
¯
B
n
)
−1
¯
B
T
n
¯
P
n+1
¯
A
n
(40)
where
¯
P
N
is set to
¯
Q
f
for the final discrete step N =
T /T
s
. In the same iteration step we get the feedback
gain matrix
¯
K
n
= −(R +
¯
B
T
n
¯
P
n+1
¯
B
n
)
−1
¯
B
T
n
¯
P
n+1
¯
A
n
. (41)
This is the core optimisation of the overall optimal
control algorithm.
5.4 Nonlinear Iterations
To solve the problem of hitting the ball at a specified
position with specified velocity at a specified time we
use nonlinear iterations. Thus, in the first iteration
we compute an initial guess of our nonlinear system
(10) from the actual time-step n = 0 till the final time-
step N. Based on this prediction the linearisations are
done and the feedback gains are provided for all fu-
ture steps. In the next iteration loop, the current sys-
tem state x(0) is used together with the linearisations
and feedback gains from the last step to predict the
behaviour for time-steps n = 1 to N and again lin-
earise the system based on this initial guess and pro-
viding the feedback gains. In each iteration the lin-
earised system converges more to the nonlinear sys-
tem. Moreover, if the linearised system diverges from
the nonlinear system, the next iteration update step
will tend the linearisation towards the nonlinear sys-
tem as the nonlinear current state x(0) is used as start
parameter. The cascaded implementation is explained
in Algorithm 1. The operating loop runs until the ball
has been hit. The most important steps are done in
systemForecast, lineariseFpv and dplqrAffine.
In systemForecast we compute the linearised dis-
crete affine system
¯
A
n
and
¯
B
n
in three steps.
First, we predict the system behaviour and lineari-
sation points x
∗
n
and u
∗
n
with (18) and (19) given
¯
K
n
,
¯
A
n
and
¯
B
n
from the last iteration step. The lineari-
sation of the system is also done in systemForecast.
Hence, we create the first order Taylor series in (21),
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
50

Algorithm 1: Cascaded implementation.
// Eq. (42)-(45)
1 [
¯
A
n
,
¯
B
n
,
¯
Q
f
,x
∗
n
] =initialGuess(p,v,x(0));
2 for n
up
= [0,N −1] do
3 x(0) =getState();
4 if n
up
> 0 then
// Eq. (18), (19), (21), (23), (24), (38)
5 [
¯
A
n
,
¯
B
n
,x
∗
n
] =systemForecast(
¯
K
n
,x(0),
¯
A
n
,
¯
B
n
);
6
¯
Q
f
=lineariseFpv(x
∗
N
,p, v); // Eq. (26), (28)
7 end
// Eq. (40), (41)
8
¯
K
n
=dplqrAffine(
¯
A
n
,
¯
B
n
,
¯
Q
f
,
¯
Q,R);
9 setGain(K
n
);
10 end
(23) and (24) using the provided linearisation points
to get the continuous system at those points. Finally,
we discretise the continuous system by (38).
Secondly, in the function lineariseFpv we obtain
the final penalisation with x
∗
N
as linearisation point
of Equation (26). The resulting matrix
¯
J
f
is then pe-
nalised by W
f
leading to the final penalisation matrix
¯
Q
f
(Equation (28)).
Finally, the feedback gain for the controller is cal-
culated in dplqrAffine based on the linearisations via
(40) and (41).
5.5 Initial Guess
Before iterating the loop of Algorithm 1 we need
to provide start conditions. This is fulfilled in ini-
tialGuess. As we have no actual control gains or sys-
tem linearisations at the iteration start, we need to pro-
vide a first system prediction. Thus, we first calculate
an initial guess for a desired final state x
d
from p and
v which is then used to guess the intermediate states.
This is done by iterating the desired position and ap-
ply first axis rotation R
1
0
(q
1
) for different angles q
1
in
the range [−170
◦
,170
◦
] utilising 5
◦
steps. Obtaining
p
2
= T
2
0
+ R
1
0
(q
1
)p
0
(42)
as desired point in Axis 2 coordinates, except any ro-
tations of Coordinate System 2. Next we solve the
inverse kinematics for given q
1
by
q
invkin
(q
1
,p) =
q
1
q
2
q
3
=
q
1
arctan
p
x
p
z
arcsin
p
y
√
p
2
x
+p
2
y
+p
2
z
.
(43)
This results in a set of possible angle rotations
reaching the same end-position p. Out of the set we
want to find the one with the lowest overall rotation
D
A
D
A
Microcontroller
Computer
K
n
u
x
Task Level
Optimal
Control
Ball
Tracking
p, v, T
Figure 5: Distributed system with robot as plant, a micro-
controller as feedback controller and collector of sensor sig-
nals from the robot and a computer as ball detector, using
the cameras, and feedback gain optimiser.
of the joints, i. e.
q
d
= min
q
1
∑
(q(0) −q
invkin
(q
1
,p))
2
, (44)
where q(0) is the current joint position.
For the angular velocity we plug q
d
into the Jaco-
bian of (14). Taking the pseudo-inverse, as the inverse
does not exist due to redundancy, results in the desired
velocity on the tangential plane
˙
q
d
=
∂ f
kin
(q
d
)
∂q
†
v
d
, (45)
where ()
†
denotes the pseudo-inverse.
To provide the discrete linearised system we as-
sume a straight line from current state x(0) to the ini-
tial desired state x
d
as linearisation points x
∗
n
. Though,
we suppose that the system will follow the states on
the line without any commanded torque (u
∗
n
= 0).
With these definitions we can compute the linearised
system by (21), (23) and (24) and descretise the result
by (38). Note, that this is just an initial guess which
has no influence to the final optimal result as long as it
takes Algorithm 1 to the valley at the global optimum.
5.6 Chained Implementation
Computing a feedback gain instead of a trajectory al-
lows us to modify the system presented in the first
section in Figure 3 to a faster distributed system in
Figure 5. Our described computations run separated
on a computer and microcontroller using discrete sig-
nals from camera and other sensors.
The microcontroller is responsible for the joints
torque control. It computes the torque using the feed-
back gain matrix
¯
K and the actual system state x(0),
running on a sample time of 1ms.
TaskLevelOptimalControlofaSimulatedBallBattingRobot
51

Figure 5 also shows the camera system connected
to the computer which tracks throwing balls, which is
not part of this paper but basically explained in Sec-
tion 7. Moreover, velocity, position and time of im-
pact are predicted and provided and serve as our con-
trolling system goal parameters. The camera system
runs on a slower sample time of 50 ms. The slower
camera sample time is used as update time T
up
in the
loop of Algorithm 1. During each camera update one
iteration is processed. This allows us a forecast of the
states x
∗
n
, given the input u
∗
n
. The forecasted states are
then used as new linearisation points for the system at
the next camera update and a more precise calculation
of the controllers gain matrices
¯
K
n
can be achieved.
The feedback gains are transferred after each iteration
to the microcontroller. This allows a faster sampling
time, as the microcontroller just computes one matrix
multiplication in each step. If it had to compute the
feedback gain matrix, such a fast sample time would
be impossible. Moreover, it allows a fast reaction on
disturbances in a linearised optimal way and later con-
verges to the nonlinear optimum by the iteration loop.
6 COMPARISON TO INFINITE
HORIZON LQR
Compared to the infinite horizon LQR, which has no
final time, we make use of the finite LQR by setting
the final time as input parameter to the optimisation
problem. Moreover, the infinite LQR would lead to a
fast achieving of the final state, which causes greater
amount of input command. This is not useful with the
time horizon in mind, where we know when to reach
the final state and so we are able to distribute the com-
manded torques more equally to each step. We will
show this in the next section by running a simulation
of our system and the distribution of a fast running
controller on a microcontroller and a slower running
feedback gain computation on a computer.
7 SYSTEM CONTEXT
In this paper we present the controller itself using the
position p, velocity v and the final time T as input pa-
rameters for the controller. How to obtain these val-
ues is not part of this paper. However, for a better
understanding of the overall process we give a short
description about the system context. Throwing balls
towards the robot will lead to a detection of the balls
using two cameras mounted left and right from the
robots center axis. Circles are detected independently
in the left and right camera image. The detected
circles are then passed to either a Multiple Hypoth-
esis Tracker (MHT) that handles clutter and covers
missing detections followed by an Unscented Kalman
Filter (UKF) for estimation of position and veloc-
ity, which are used for prediction of the future states
(Laue et al., 2013). Alternatively they are passed to a
so called Fully Probabilistic Multiple Target Tracker
(FPMHT)(Birbach and Frese, 2013). With both algo-
rithms we intersect the predicted trajectory with the
workspace sphere and use the first intersection as p.
This is implemented on the previous version of the
robot, with v fixed to 0. The velocity needed for re-
turn is future work, but the theoretical implementation
has been investigated in (Hammer, 2011). Therefore,
a realistic rebound model of two balls can be used
to determine the direction vector and so the velocity
needed to rebound the ball.
8 SIMULATIONS
In a few scenarios we demonstrate the system be-
haviour using TLOC to reach a specified position and
velocity on different time constraints and we illus-
trate the robustness by applying a disturbance torque
to the system. All simulations are based on the
dataflow diagram of Figure 5 implemented in Matlab
and Simulink. There are three simulations combined:
A robot simulation, which runs with the forward dy-
namics of Spatial v2 library and some extensions for
the flexible case; a microcontroller simulator, includ-
ing only the torque computation in each millisecond
and discretisation via sample and hold; the computer
simulator, for operating the TLOC every 50ms.
8.1 Elasticity Behaviour
First we illustrate the controller’s behaviour and sys-
tem reaction by reaching a defined goal position p
d
,
with velocity v
d
at time T . Therefore, we set the pe-
nalisation for position q
p
, velocity q
v
, torque r
τ
and
vibration reduction q
vib
. The values for the parame-
ters are shown in Table 1. Starting in upright position
p(0) with zero velocity v(0) we can see the behaviour
of the joints and the commanded torque in Figure 6.
We see the motor and joint positions and velocities
as well as the commanded torque. Due to the spring
stiffness K and the coupling between motor and joint
(q −θ
θ
θ), we can see that the commanded torque acts
fast on the motor velocity, but the reaction of the joints
velocity is delayed. This delayed behaviour explains
the peaks in the commanded torque. At the first lin-
earisation points the system does not react as the con-
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
52
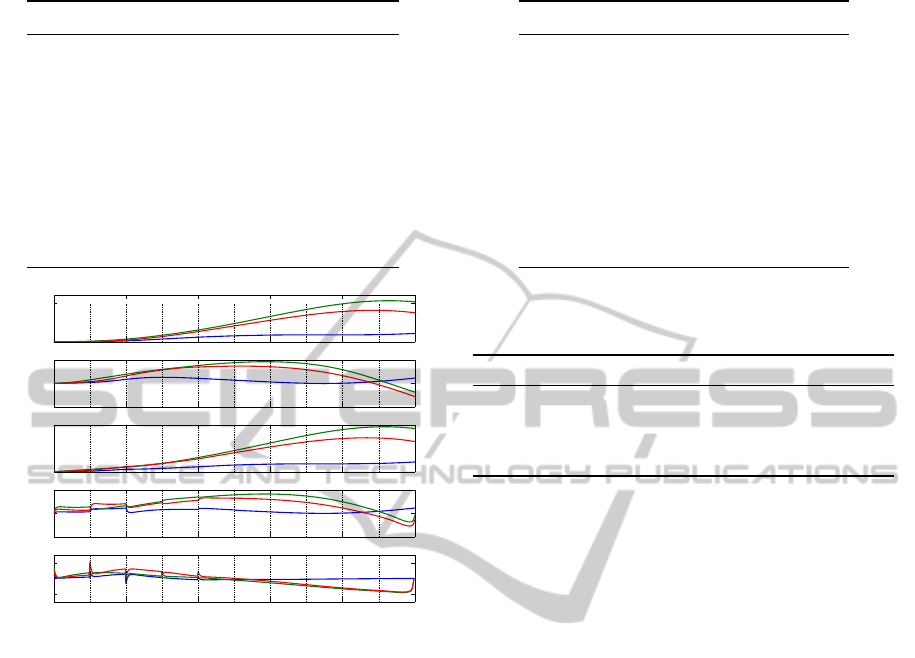
Table 1: Parameters for the elasticity behaviour.
Parameter Value
p(0) (0.0 0.0 1.9)
T
m
p
d
(0.45 0.636 1.45)
T
m
v(0) (0.0 0.0 0.0)
T
m/s
v
d
(0.0 −1.0 1.414)
T
m/s
T 0.5 s
q
p
5 ×10
6
m
−2
q
v
5 ×10
6
s
2
m
−2
q
vib
1.0 s
2
r
τ
0.01 (Nm)
−2
0 100 200 300 400 500
0
50
q[
◦
]
0 100 200 300 400 500
−200
0
200
˙q[
◦
/s]
0 100 200 300 400 500
0
50
θ[
◦
]
0 100 200 300 400 500
−200
0
200
˙
θ[
◦
/s]
0 100 200 300 400 500
−10
0
10
u[Nm]
time[s/T
s
]
Figure 6: Reaching the goal position in T = 0.5s. Blue,
green, red denotes Axis 1, 2 and 3 respectively. Vertical
dashed lines denote the update times.
troller wanted due to linearisation errors, thus, to ful-
fil a reaction on the joints position and velocity, the
spring has to be tensioned or loosened quickly. After
reaching the desired tension on the spring the torque
can be smoother.
Moreover, the torque is distributed over the whole
time span, bringing the axes to a position where the
goal could be reached. Here we accurately reach the
final position p(T ) = (0.45 0.6359 1.4507)
T
m and
velocity v(T ) = (−0.0007 −1.0004 1.4121)
T
m/s
with the angular positions and velocities of Figure 6.
8.2 Time and Disturbance Behaviour
In this section we show the behaviour of the sys-
tem when the time horizon changes and if a torque
is added to the system as disturbance. Thus, we hit
the ball in every scenario in the same desired posi-
tion p
d
, with velocity v
d
and desired time T . Starting
in the upright EOF position p(0) with zero velocity
v(0). We set the penalisation for position q
p
, veloc-
Table 2: Parameters for the time and disturbance behaviour.
Parameter Value Unit
p(0) (0.0 0.0 1.9)
T
m
p
d
(0.0 0.0 1.9)
T
m
v(0) (0.0 0.0 0.0)
T
m/s
v
d
(5.0 0.0 0.0)
T
m/s
T 0.3 s
q
p
5.0 ×10
6
m
−2
q
v
5.0 ×10
6
s
2
m
−2
q
vib
1.0 s
2
r
τ
0.01 (Nm)
−2
Table 3: Comparison of the experiments of reached position
and velocity to desired reference. Denoted in the table as
ref.
Position [mm] Velocity [m/s]
ref (0.0,0.0, 1900) (5.0,0.0, 0.0)
(a) (1.2,−0.1, 1900) (4.9989,−0.0001, −0.0067)
(b) (0.5,−0.1, 1900) (4.9996,−0.0001, −0.0029)
(c) (1.1,−0.9, 1900) (4.9992,−0.0018, −0.0063)
ity q
v
, torque r
τ
and vibration reduction q
vib
and other
values as shown in Table 2.
The position and velocity results of our experi-
ments (a)–(c) are given in Table 3 . All figures includ-
ing the joint angle, joint velocity and the input com-
mand. Here we neglect the motor position and veloc-
ity in the figures as well as the vertical lines showing
the update. The update time has not changed and is
again 50ms.
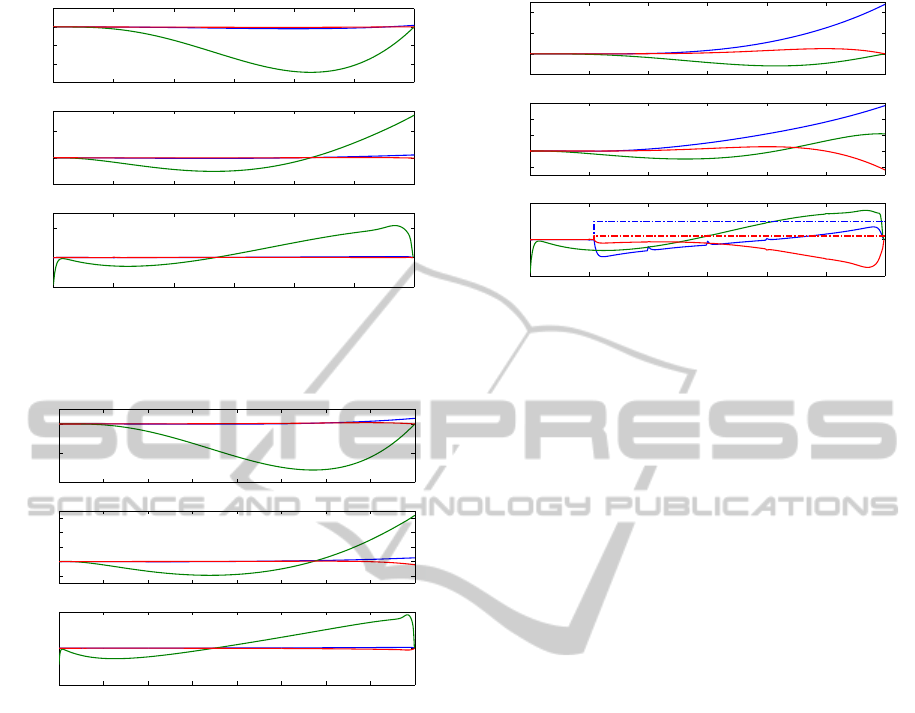
(a) We first want to reach the desired position and
velocity in the given time of 0.3s as comparison ex-
ample. Therefore, Axis 2 turns backwards to accel-
erate the axis to the desired velocity (c. f. Figure 7).
Position and velocity are accurately reached.
(b) To show the time benefit of the controller, we
change the desired time to T = 0.8s. This results in
a reduction in torque and “striking out” more from
the EOF rest position compared to the previous sim-
ulation (a). The further Axis 2 moves away from the
rest position the better it can accelerate the EOF by
less command torque. This is the result of giving the
controller more time to reach the goal, thus it can dis-
tribute the torque better over time (Figure 8).
(c) We now show the robustness of our controller
by applying a disturbance torque such that the input
torque is τ
m
= u + τ
dist
. This can also be interpreted
TaskLevelOptimalControlofaSimulatedBallBattingRobot
53
0 50 100 150 200 250 300
−15
−10
−5
0
5
q[
◦
]
0 50 100 150 200 250 300
−200
0
200
˙q[
◦
/s]
0 50 100 150 200 250 300
−20
0
20
u[Nm]
time[s/T
s
]
Figure 7: Simulation (a), reaching the goal position and ve-
locity in T = 0.3 s. Blue, green, red denotes Axis 1, 2 and 3
respectively.
0 100 200 300 400 500 600 700 800
−40
−20
0
q[
◦
]
0 100 200 300 400 500 600 700 800
−100
0
100
200
300
˙q[
◦
/s]
0 100 200 300 400 500 600 700 800
−10
0
10
u[Nm]
time[s/T
s
]
Figure 8: Simulation (b), reaching the goal position and ve-
locity in T = 0.8 s. Blue, green, red denotes Axis 1, 2 and 3
respectively.
as a torque resulting from friction, which is demon-
strated later. A disturbance torque can be, e. g. some
external force pushing the head to another direction.
Figure 9 shows the disturbance as a step function of
τ
dist
= (10 0 2)
T
Nm starting after 54 ms. Here you
can see the difference of forecast behaviour and real
behaviour by little spikes in the commanded torque at
the update steps. The reason is that the linearisation
points x
∗
n
are based on the modeled behaviour. When
the nonlinear system deviates from that behaviour, the
controller immediately reacts in a linearised optimal
way, because the output of dynamic programming is
not a sequence of torques but a policy, i. e. a sequence
of controller gains. In addition to this immediate lin-
earised response, in the next iteration of Algorithm 1
the measured state x(0) is used, linearisations are up-
dated and the policy is recomputed based on that state.
This results in a (close to) nonlinear optimal response
from that point on, visible in the small spike in u.
0 50 100 150 200 250 300
−20
0
20
40
q[
◦
]
0 50 100 150 200 250 300
−200
0
200
400
600
˙q[
◦
/s]
0 50 100 150 200 250 300
−20
0
20
u[Nm]
time[s/T
s
]
Figure 9: Simulation (c). Reaching the goal position and
velocity in T = 0.3 s and applying a disturbance torque to
Axis 1 (dashed blue) and 3 (dashed red). Blue, green, red
denotes Axis 1, 2 and 3 respectively.
However, the goal position is met accurately (c. f.
Table 3) even if a disturbance is acting on the sys-
tem. Unlike trajectory optimisation followed by po-
sition control the system, however, does not hold its
trajectory (compare Figure 7 and 9) but flexibly reacts
to the disturbances even distributing the motion in a
different way. The controller adapts to the new situ-
ation. Furthermore, the desired position and velocity
are hold accurately, which would not be the case if
a joint torque trajectory would have been set to the
system.
8.3 Friction
In this simulation we want to show how the con-
troller deals with friction, which is unconsidered in
the model but added to the plant. The goal position
and velocity is given in Table 3. We set the static
friction to 5 Nm and the Coulomb friction to 4 Nm.
As friction is a non-differentiable function, which is
a problem for the simulation solver, we approximate
the friction by a sigmoid function to get a soft transi-
tion when the velocity is around zero. In this exper-
iment we let the friction act on the motor side, such
that a zero crossing of the input torque u leads to a
change in the motor acceleration
¨
θ
θ
θ. If the resulting
velocity changes its direction, it can be seen in the
friction too. If the velocity is around zero, then fric-
tion is between minimum and maximum static friction
(c. f. Figure 10 the red and blue dashed lines). Com-
pared to the real world we differ in the correctness of
the friction model, but we are interested in moving,
so we do not need to be accurate when the friction
is highest, which is at zero velocity. Moreover, we
reached the position (1.0,0.0,1900) [mm] and veloc-
ity (4.9982,0.0006,−0.0056) [m/s] accurately, which
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
54

0 50 100 150 200 250 300
−20
−10
0
10
q[
◦
]
0 50 100 150 200 250 300
−200
0
200
400
˙q[
◦
/s]
−50
0
50
u[Nm]
0 50 100 150 200 250 300
−5
0
5
τ
f
[Nm]
time[s/T
s
]
Figure 10: Reaching the goal position and velocity in T =
0.3s and applying friction to all axes (dashed). Blue, green,
red denotes Axis 1, 2 and 3 respectively.
shows the robustness also against friction which is not
considered in the model.
8.4 Deviation of Model Parameters
In the previous tests we expected that the model of
the plant and the plant itself are identically. In this
simulation we identify how the controller is acting, if
the plant parameters are varied, i. e. varying the val-
ues for motor inertia B, joint spring stiffness K and
damping D. First, we run the simulations 100 times
and change the parameters B and K in the range of
±10% of the modeled value. Secondly, we repeat the
test and additionally vary the damping D coefficient
within [0,K ·0.1s].
Figure 11 points out, that a divergence of the pa-
rameters will lead to a deviation of the accuracy. The
damping parameter seems more critical (+ markers),
but the error still be below 2.5cm, which is precise
enough to hit the ball despite considerabel velocity
error.
8.5 Example of Intended Use
Finally, we provide a video
1
where four motion se-
quences are shown. Each sequence consists of a
movement reaching a desired position with given ve-
locity at a specified time and moving back to the rest
upright position with velocity zero. Then the next se-
quence starts. This simulates the ball batting task.
In such a task the robot waits for thrown balls in
its initial position, then accelerates towards the balls
intersection point. Hitting the ball with desired veloc-
1
http://www.informatik.uni-
bremen.de/agebv2/downloads/videos/schuethe icinco 14 doggyExampleMotion.mp4
0 0.005 0.01 0.015 0.02 0.025
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
kv − v
d
k
2
kp − p
d
k
2
Figure 11: Euclidean distance from reached position and
velocity to desired one with varied parameters B and K
within ±10%(x markers) and additionally with D (+ mark-
ers).
ity should return the ball to the player thrown the ball
or towards another person standing next to the robot.
The video just simulates the robot motion and po-
sition. The specified position is a ball and the desired
velocity is marked as an arrow. The arrow direction
shows the desired Cartesian velocity direction. If the
desired velocity is set to zero, no arrow will be drawn.
It is shown that the movements include all axes.
Moreover, the dynamic of the robot can be seen. It
shows fast and slow movements, depending on the de-
sired time for a movement and the specified velocity.
9 CONCLUSION AND FUTURE
WORK
We have shown an optimal state feedback controller
for a simulated, redundant and flexible robot. The
controller is capable of steering the joints position and
velocity such that they are reaching a desired Carte-
sian position under and velocity at a given time, which
is needed to rebound a ball. Moreover, the controller
intelligently distributes the torques to all axes by mak-
ing use of the redundancy and hence, having less max-
imum torque for a single axis. Additionally, we see an
adaption of the controller to changing conditions.
The presented controller will be extended by con-
straints on joint angles and motor torques - which
were neglected in this paper -, to adapt our approach
more to the physical system. Furthermore, we have
to take friction into consideration, which is challeng-
ing in slow joint movements, but we have shown that
the controller can handle it without knowing the fric-
tion. Finally, the whole process has to be imple-
mented on the real robot, including system identifi-
TaskLevelOptimalControlofaSimulatedBallBattingRobot
55

cation and state estimation, to verify our simulated
results. For playing back balls accurately we have to
calibrate the system to get a good fitting model. A
very worthwhile further extension could be to include
the physics of playing back the ball into the optimisa-
tion, so the system does not try to achieve a position
and velocity as explained herein, it would optimise
the ball’s goal position, e. g. an opponent player’s po-
sition or any other desired position surrounding the
robot.
ACKNOWLEDGEMENTS
This work has been supported by the Graduate School
SyDe, funded by the German Excellence Initiative
within the University of Bremen’s institutional strat-
egy.
REFERENCES
Albu-Schaeffer, A., Ott, C., and Hirzinger, G. (2007). A
unified passivity-based control framework for posi-
tion, torque and impedance control of flexible joint
robots. The International Journal of Robotics Re-
search, 26(1):23–39.
Berg, J., Patil, S., Alterovitz, R., Abbeel, P., and Goldberg,
K. (2011). LQG-based planning, sensing, and control
of steerable needles. In Hsu, D., Isler, V., Latombe,
J.-C., and Lin, M., editors, Algorithmic Foundations
of Robotics IX, volume 68 of Springer Tracts in Ad-
vanced Robotics, pages 373–389. Springer Berlin Hei-
delberg.
Birbach, O. and Frese, U. (2013). A precise tracking algo-
rithm based on raw detector responses and a physical
motion model. In Proceedings of the IEEE Interna-
tional Conference on Robotics and Automation (ICRA
2013), Karlsruhe, Germany, pages 4746–4751.
Featherstone, R. (2008). Rigid body dynamics algorithms,
volume 49. Springer Berlin.
Featherstone, R. (2010). A beginner’s guide to 6-D vec-
tors (part 2) [tutorial]. Robotics Automation Maga-
zine, IEEE, 17(4):88–99.
Featherstone, R. (2012). Spatial v2 (version 2).
http://royfeatherstone.org/spatial/v2/notice.html.
Goretkin, G., Perez, A., Platt, R., and Konidaris, G. (2013).
Optimal sampling-based planning for linear-quadratic
kinodynamic systems. In Robotics and Automa-
tion (ICRA), 2013 IEEE International Conference on,
pages 2429–2436.
Hammer, T. (2011). Aufbau, Ansteuerung und Simulation
eines interaktiven Ballspielroboters. Master’s thesis,
Universitaet Bremen.
Hu, J.-S., Chien, M.-C., Chang, Y.-J., Su, S.-H., and Kai,
C.-Y. (2010). A ball-throwing robot with visual feed-
back. In Intelligent Robots and Systems (IROS), 2010
IEEE/RSJ International Conference on, pages 2511–
2512.
Kober, J., Mulling, K., Kromer, O., Lampert, C. H.,
Scholkopf, B., and Peters, J. (2010). Movement tem-
plates for learning of hitting and batting. In Robotics
and Automation (ICRA), 2010 IEEE International
Conference on, pages 853–858.
Laue, T., Birbach, O., Hammer, T., and Frese, U. (2013). An
entertainment robot for playing interactive ball games.
In RoboCup 2013: Robot Soccer World Cup XVII,
Lecture Notes in Artificial Intelligence. Springer. to
appear.
Muelling, K., Kober, J., Kroemer, O., and Peters, J. (2013).
Learning to select and generalize striking movements
in robot table tennis. The International Journal of
Robotics Research, 32(3):263–279.
Nakai, H., Taniguchi, Y., Uenohara, M., Yoshimi, T.,
Ogawa, H., Ozaki, F., Oaki, J., Sato, H., Asari, Y.,
Maeda, K., Banba, H., Okada, T., Tatsuno, K., Tanaka,
E., Yamaguchi, O., and Tachimori, M. (1998). A vol-
leyball playing robot. In Robotics and Automation,
1998. Proceedings. 1998 IEEE International Confer-
ence on, volume 2, pages 1083–1089 vol.2.
Perez, A., Platt, R., Konidaris, G., Kaelbling, L., and
Lozano-Perez, T. (2012). LQR-RRT*: Optimal
sampling-based motion planning with automatically
derived extension heuristics. In Robotics and Automa-
tion (ICRA), 2012 IEEE International Conference on,
pages 2537–2542.
Reist, P. and Tedrake, R. (2010). Simulation-based lqr-
trees with input and state constraints. In Robotics and
Automation (ICRA), 2010 IEEE International Confer-
ence on, pages 5504–5510.
Senoo, T., Namiki, A., and Ishikawa, M. (2006). Ball con-
trol in high-speed batting motion using hybrid trajec-
tory generator. In Robotics and Automation, 2006.
ICRA 2006. Proceedings 2006 IEEE International
Conference on, pages 1762–1767.
Siciliano, B. and Khatib, O. (2008). Springer handbook of
robotics. Springer.
Sontag, E. D. (1990). Mathematical control theory: deter-
ministic finite dimensional systems. Texts in applied
mathematics ; 6. Springer, New York [u.a.].
Spong, M. W. (1995). Adaptive control of flexible joint
manipulators: Comments on two papers. Automatica,
31(4):585 – 590.
Zhang, P.-Y. and L, T.-S. (2007). Real-time motion plan-
ning for a volleyball robot task based on a multi-agent
technique. Journal of Intelligent and Robotic Systems,
49(4):355–366.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
56
