
Comparison of Different Powered-wheelchair Control Modes for
Individuals with Severe Motor Impairments
Alfredo Ch´avez
1
, H´ector Caltenco
2
and V´ıtˇezslav Beran
1
1
Faculty of Information Technology (FIT), Brno University of Technology, Brno, Czech Republic
2
Certec, Dept. of Design Sciences, Lund University, Lund, Sweden
Keywords:
Shared Control, Autonomous Wheelchair System.
Abstract:
This paper presents the preliminary evaluation of different powered-wheelchair control modes for individuals
with severe motor impediments. To this end, a C400 Permobil wheelchair has been updated with a control
command communication interface and equipped with a scanning laser sensor to carry out the automation al-
gorithms that are part of the robot operating system framework. A pilot test was performed with three different
modalities; hand-joystick mode, tongue-joystick mode and autonomous mode. The results of the tests have
proven the feasibility of using a power wheelchair either autonomously or controlled by users interchangeably
in order to continue the development towards a better user/wheelchair shared-control paradigm.
1 INTRODUCTION
Electrically powered wheelchairs (PWC) are used to
assist mobility of individuals with severe motor dis-
abilities, such as those with tetraplegia. Users that
still maintain some degree of motor control of arms
or hands use a joystick in order to control the direc-
tion and speed of the PWC. In the other hand, users
with more severe or total motor disabilities have to
rely on alternative interfaces to control a PWC. To
this end, research has been done to develop devices
that can interface the remaining functional parts of
such individuals. Such as interfaces based on detect-
ing head movement (Christensen and Garcia, 2003),
chin movement (Guo et al., 2002), the eyes (Agustin
et al., 2009), the tongue (Huo and Ghovanloo, 2010;
Lund et al., 2010) and even forehead muscular activ-
ity and brain waves(T. Felzer and R. Nordman, 2007).
However, most of these interfaces require high
levels of concentration for navigating in environments
with many obstacles. The eye-tracking system maybe
tedious and tiresome when it is used constantly to ma-
neuver a wheelchair. Furthermore, it can also affect
the normal use of the user’s vision, especially in cases
where the user, either consciously or unconsciously,
looks at a point in the surrounding environment rather
than at the desired path. In which case the system may
believe that the user wants to go to that position (Huo
and Ghovanloo, 2009). Similar problems might occur
with head tracking interfaces. In general, driving the
wheelchair with a specific interface and doing an ac-
tivity that require the use of the same part of body, e.g.
the eyes, the head or speech at the same time, might
not be efficient.
Brain-computer interfaces (BCI) often used elec-
troencephalographs (EEG) to detect voltage fluctua-
tions in the scalp. There are few limitations of using
BCIs to control PWC. Due to a small signal amplitude
in the brain waves, EEG signals need to be amplified
by a factor on the order of 10
4
, thus any noise con-
tamination or whenever the subject blinks, swallows,
laughs, talks etc. makes the corresponding EEG sam-
ple unusable (Huo and Ghovanloo, 2009; T. Felzer
and R. Nordman, 2007). Moreover, the input rate is
also quite slow for a real-time control, e.g. it is up to
25 bits per minute making less than 1 bit every 2 sec-
onds, meaning that it will take more than 2 seconds to
stop it with a command yes/no.
Using the tongue to control a PWC seems to be
a promising alternative. The tongue is able to per-
form sophisticated motor control and manipulation
tasks with many degrees of freedom. It is able to
move rapidly and accurately and does not fatigue eas-
ily and can be controlled naturally without requiring
too much concentration. Georgia Institute of Technol-
ogy, has developed a tongue drive system (TDS) that
consists of a headset and a magnetic tongue barbell,
which is able to interpret tongue movement as com-
mands (Huo et al., 2008). The user drives the PWC
with the tongue using five different commands: for-
353
Chávez A., Caltenco H. and Beran V..
Comparison of Different Powered-wheelchair Control Modes for Individuals with Severe Motor Impairments.
DOI: 10.5220/0005026403530359
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 353-359
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

ward (FD), backward (BD), turning right (TR), left
(TL) and stopping (N) (Huo and Ghovanloo, 2010).
A smartphone (iPhone), directly connected to the
wheelchair, can serve as a bridge between the TDS
and a PWC (Kim et al., 2012), eliminating the need of
bulky computers or specialized hardware. Similarly,
an inductive tongue control system (ITCS) has been
designed at Aalborg University, which is an intra-oral
dental retainer with 18 inductive sensors that can pre-
cisely detect the position of a metallic tongue barbell
(Lotte and Andreasen, 2006). The ITCI can interpo-
late the sensors signals to emulate an intra-oral touch-
pad that can proportionally control the direction and
speed of the PWC, just as if it was controlled by a
standard joystick. Moreover, it can provide 10 dif-
ferent function commands with the remaining sensors
(Caltenco et al., 2011).
In the previous approaches the system lacks of
full autonomy, meaning that the user has to use the
tongue all time to conduct the wheelchair to a de-
sire goal location. A survey showed that 973, 706 to
1, 700, 107 persons in the U.S. would benefit from an
autonomous PWC (Richard et al., 2008). Especially
patients with diagnoses of ALS, cerebral palsy (CP),
cerebrovascular accident (CVA), multiple sclerosis
(MS), multiple system atrophy (MSA), severe trau-
matic brain injury (TBI), among others. Moreover,
1, 389, 916 to 2, 133, 280 would benefit from a PWC
that provides obstacle avoidance, duties of planning
and navigating, but where the user still has control of
high-level tasks, such as destination point selection,
emergency stop and direction change. For instance
users with Diagnoses of Alzheimer disease (AD),
ALS, CP, CVA, blindness or low vision, MS, MSA,
Parkinson disease (PD), spinal cord injury (SCI) at
or above fourth cervical vertebra (C4), among others.
There has been several advances in the development
of fully auntonomous wheelchair navigation systems
using laser range finders (Demeester et al., 2008),
depth sensors/cameras (Theodoridis et al., 2013) and
other combination of navigation sensors and equip-
ment. An extensive review of several autonomous
wheelchairs has been performed by Simpson (Simp-
son, 2004).
However a fully autonomous system is not de-
sired, since users should be allowed as much control
of the wheelchair as their capabilities and the degree
of disability allows them to. There has been several
proposes of semi-autonomous wheelchair navigation
systems (Demeester et al., 2008; Andrea et al., 2012;
Bonarini et al., 2013; Galindo et al., 2006a; Galindo
et al., 2006b; Fern´andez-Madrigalet al., 2004). These
studies propose to facilitate the participation of hu-
mans into the robotic (autonomous) system and ther-
fore improve the overall performance of the robot as
well as its dependability. However, not all levels of
motor impairment lead to the same available human-
input capacity to the system. Some users might be
able to generage richer input to the system than oth-
ers. The research work done in this paper will be
used as a prelude for a novel user-wheelchair con-
trol paradigm that shall take into consideration the
needs and abilities of individuals with severe motor
impairments to control a PWC in a user-controlled, to
a semi-autonomous to a fully autonomous way. The
previous depends on the degree of disability and the
amount of input the user can give in a fast and efficient
way.
Section 2 describes the system used in this re-
search. Whereas, section 3 deals with the descrip-
tion of the methos that have been choosen in order
to achive the scope of the project. A pilot test has
been planned to test the different modalities, which is
handle in Section 4. Furthermore, a comparison of the
different modes under the pilot test is achieved in Sec-
tion 5. And, finally, section 6 presents the conclusion
and future research work.
2 SYSTEM DESCRIPTION
The C400 Permobil PWC is depicted in Figure 1. It
comes with an Easy Rider wheelchair interface, from
HMC International, an Easy Rider display unit and a
joystick. It offers 8 modes of operation (1-way joy-
stick, 4-way joystick, 1, 2, 3, 4 or 5-switches, and
Sip and Puff Control), and the one of interest is the
standard 4-way joystick mode to control the PWC.
The standard joystick mode accepts as input signals
a reference value of 5V and two analog voltage val-
ues in the range of 4V to 6V to proportionally move
the PWC from right to left and from back to for-
ward. To this end, an interface to send velocity con-
trol commands (VCC) from the computer to the mo-
tors has been designed using an Arduino UNO board.
The arduino board receives two VCC bytes (one for
left-right and one for forward-backward) and gener-
ates two pulse width modulated (PWM) signals in the
range of 0 to 5V. The signals are converted to analog
voltage using a simple RC low-pass filter and stepped-
up using a single supply non-inverting DC Summing
Amplifier. The resulting voltage is used to emulate
the analog joystick position as an input to the Easy
Rider interface. The Easy Rider interface then sends
the necessary control signals to the wheelchair’s CAN
bus motor controller.
The ITCS (Caltenco et al., 2011), consists of two
separate parts, the intra-oral device and an external
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
354

Figure 1: C400 permobil wheelchair.
Figure 2: Overview of the Inductive Tongue Control System
(ITCS).
controller. The intra-oral device detects tongue move-
ments and wirelessly transmit signals to the external
controller, which connects to the Easy Rider inter-
face via the Joystick Input and to the computer via
bluetooth. The ITCS’s external controller interprets
and process tongue movement signals and transforms
them into joystick or mouse commands that can be
sent to the wheelchair or the computer 2. The com-
puter is a Lenovo T540p with an Intel(R) Core(TM)
i5-4200M CPU @ 2.50GHz running Ubuntu 12.04
(precise).
The interaction to the external world is carried out
by a Hokuyo UTM-30LX scanning laser range finder.
It has a sensing range from 0.1m to 30m. Measure-
ment accuracy is within 3mm tolerance up to 10m of
the sensor’s range. The scanning rate is 25 millisec-
onds across a 270 range.
3 METHODS
Robot operating system (ROS) (Quigley et al., 2009)
is proposed as the software architecture to achieve
the different modes the user can select to drive the
PWC. The navigation stack (NS), which is a set of
configurable nodes, has been configured properly to
the shape and dynamics of the PWC to be performed
at a high level. Broadly speaking, the heart of the nav-
igation stack is the move base node which provides
a high level interface between odometry, PWC base
controller, sensors, sensor transforms, map server and
Monte Carlo localization algorithm (AMCL) nodes to
the local and global planners.
The global map is created by the gmapping pack-
age, which is an odometry-laser based SLAM (simul-
taneous localization and mapping). Then, during the
functioning of the PWC, the NS uses sensors to avoid
obstacles on the path. And, also uses these sensors to
feed a costmap package to build a local map.
The localization and tracking position of the PWC
in the map is achieved by the AMCL node, which is a
type of particle filter obtained by a proper substitution
of the probabilistic motion and perceptual models into
the algorithm of particle filter, (Dieter et al., 1999)
To ensure a collision-free path planning, the NS
uses the dynamic window approach planner (DWAP)
(Fox et al., 1997) and the Dijkstra’s algorithm nodes.
Thus, given a global plan to follow and a costmap, the
DWAP creates the velocity commands that drives the
PWC in the collision-free configuration space from a
start to a final goal location. For this purpose, an Ar-
duino rosserial command velocity interface node has
been created. Figure 3 depicts the system interaction
methods between the PWC, sensors and the NS.
Figure 3: System interaction methods.
4 PILOT TESTS
The C400 Permobil wheelchair as it is shown in Fig-
ure 1 serves as experimental testbed. In this work,
three modes; hand-joystick mode (JM
H
, tongue-
joystick mode (JM
T
, and autonomous mode (AM)
are tested by the research team, which is comprise
of two males aged 30 and 48 years. Each of these
tests were run once and carried out with real data in
an indoor environment. Which was an L-shaped cor-
ridor as depicted in Figure 4. To this end, the map
of the indoor environment was built prior to the tests,
ComparisonofDifferentPowered-wheelchairControlModesforIndividualswithSevereMotorImpairments
355

Figure 5: RVIZ set up for showing the different modes.
Figure 4: Schematics of the map.
this was achieved by using the Hokuyo laser, which
has been placed in front of the PWC. In each mea-
surement the laser scans a total of 712 readings dis-
tributed along 180
0
. Obstacles where placed on a cor-
ridor to test the accuracy of the navigation in AM.
Then, while driving the PWC in JM
H
, the gmapping
and the laser
scan matcher nodes interact to build up
the map.
To visualize the map making process and the nav-
igation in the three different test modes, the RVIZ vi-
sualization tool node is used. And, it has been set
up to be able to show the following topics: /map
from the map
server node, the raw/obstacles and
inflated obstacles from costmap 2d node, the /scan
from hokuyo node, /particlecloud from amcl node and
the /camera/rgb/image
mono from image view which
is part of the oppenni
launch driver. Finally, the robot
description format (URDF) which is an XML format
for representing a robot model is used to create a dif-
ferential driving vehicle model corresponding to the
wheelchair.
Figure 5 shows the RVIZ setup. The mono camera
is depicted in the left part. Whereas, in the right part
the particle cloud is represented as red arrows that sur-
rounds the URDF model, the local map is represented
as inflated obstacles and obstacles, these are shown
as a sky-blue and yellow colours respectively. The
obstacles in the global map are represented as black,
while the light and dark grays represents the empty
and unknown areas.
In JM
H
, the user is able to manipulate the PWC
using commands emulated from the control level, e.g.
forward (F), backward (B), right (R), left (L) and stop-
ping (S), which is the neutral joystick position. The
trajectory of the PWC for the JM
H
test can be de-
picted in Figure 6.
Figure 6: Permobil C400 in Joystick-mode.
In JM
T
, the user is able to use the ITCS to emu-
late the joystick in the cavity of the mouth. During
the execution of the velocity commands, the user has
to hold the position of the tongue over the correspond-
ing sensor in order to direct the PWC towards that di-
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
356

rection and to avoid obstacles and have a successful
trajectory. This test is depicted in Figure 7
Figure 7: Permobil C400 in ITCS-mode.
In AM, the user is able to select the coordinates
of a destination point on a map of the known envi-
ronment using the ITCS to control the mouse pointer
with the tongue. Then, the NS takes care of local-
ization of the PWC in the environment and also the
path planning and the avoidance of obstacles during
the navigation. The previous action avoids the need
of constant input from the user. Figure 8 shows the
smooth path traveled by the PWC, in which the ob-
stacles where successfully avoided and the goal has
been reached.
Figure 8: Permobil C400 in autonomous mode.
5 RESULTS OF THE TESTS
The comparison of the three modes of operation is
done in their dependent variables of measurement
(t, CO, V). Where, t is the time from an initial to a fi-
nal position, CO is the number of obstacle collisions,
and V is the average velocity.
Table 1 presents the different modes of operation
together with their dependent variables.
In JM
H
, the PWC takes from initial to a final po-
sition 1 : 40 minutes, the path is smooth and the user
does not collide with any obstacle. In JM
T
, the PWC
takes 2 : 15 minutes and it does not collide with any
obstacle. Whereas, in AM the PWC takes 2 : 00 min-
utes and it just slightly touches an obstacle with its
right front wheel as it shown in Figure 9. But this ac-
tion does not prevent the PWC to achieve the desired
goal.
Figure 9: The PWC slightly touches the box with the front
right wheel.
In the previous Table, it can be noticed that JM
H
is
faster than the other two modes, because there is a di-
rect interaction between the PWC and the user. More-
over, the user is proficient and has experience in con-
trolling hand-operated joysticks. In the other hand,
in AM the algorithms for localization, path planning,
obstacle avoidance and control have to interact as one
unit in other for the PWC to achieve its desired goal,
making the system to have a delay with respect to
the JM
H
. In JM
T
is the slowest of the three modes,
this fact could be because the user was inexperienced
in using the tongue to control the wheelchair and in
interacting with the ITCS, this situation can be im-
proved by mastering the interaction with the ITCS.
6 CONCLUSIONS
A C400 Permobil PWC has been updated with a com-
munication interface for sending and receiving veloc-
ity commands and a Hokuyo sensor for automation
purposes. So then, a pilot test was performed in a cor-
ridor’s laboratory where three control modalities were
tested and compared.
• JM
H
: The wheelchair was controlled using the in-
cluded joystick
• JM
T
: The PWC is controlled by velocity com-
mands that are given by a ITCS device which has
been placed in the cavity of the mouth.
• AM: Automation algorithms that are part of the
ROS-NS were tested. In this mode, the destina-
tion selection was performed by the ITCS device,
while the wheelchair control was autonomous.
ComparisonofDifferentPowered-wheelchairControlModesforIndividualswithSevereMotorImpairments
357
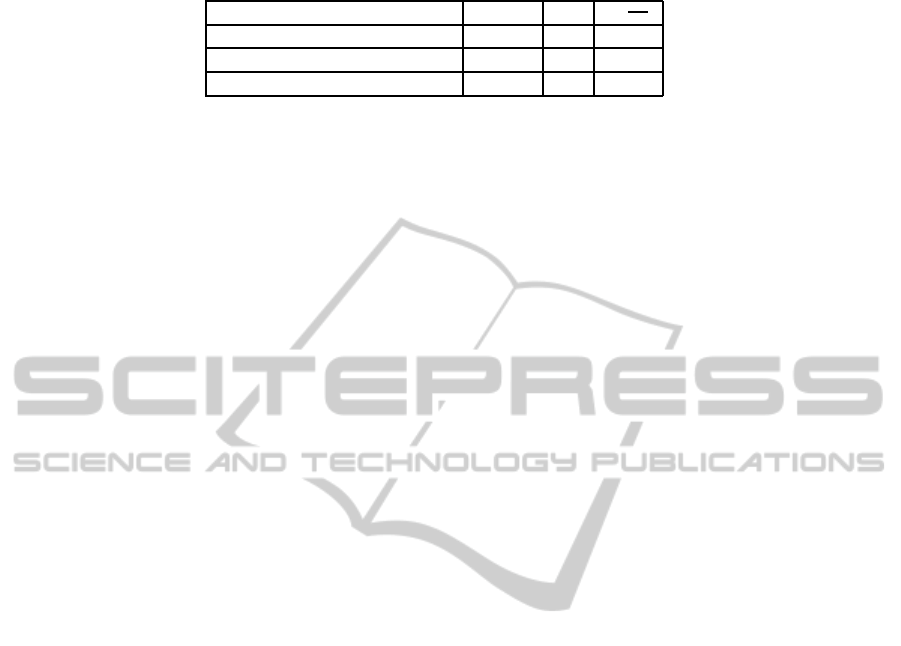
Table 1: Comparison Between operation modes.
t (min) CO V
m
sec
Hand-joystick mode (JM
H
) 1 : 40 0 0.260
Tongue-joystick mode (JM
T
) 2 : 11 0 0.198
Autonomous-mode (AM) 2 : 00 1 0.216
The tests carried out in the present research have
serve as a prelude for the development of a shared-
control paradigm for individuals with severe motor
impairments. There is a necessity to broad the capa-
bilities of the shared control algorithms, where they
need to be tested in clutter environments and narrow
doorways. In these tests, users with severe upper-
limb motor impairments should be taken into account
when driving the power wheelchair. The abilities and
needs of users with high-level spinal cord injury is
different from those of spastic users, or users with
ALS. Therefore, the amount of user-control and the
amount of automation should be differentfor different
users, depending on the amount and quality of input
the user can give to the system. We believe that this
new paradigm will revolutionize the way the power
wheelchair users with severe upper-limb impairments
interact with a wheelchair and the environment.
ACKNOWLEDGEMENTS
This work was supported by The European So-
cial Fund (ESF) in the project Excellent Young Re-
searchers at BUT (CZ.1.07/2.3.00/30.0039). This
project is part of the IT4Innovations Centre of Ex-
cellence (CZ.1.05/1.1.00/02.0070). It was performed
in collaboration between Brno University of Technol-
ogy, Czech Republic and Lund University, Sweden.
REFERENCES
Agustin, J. S., Mateo, J. C., Hansen, J. P., and Villanueva,
A. (2009). Evaluation of the potential of gaze input
for game interaction. PsychNology Journal, 7(2):213–
236.
Andrea, B., Simone, C., Giulio, F., and Matteucci, M.
(2012). Introducing lurch: a shared autonomy robotic
wheelchair with multimodal interfaces. In In Proceed-
ings of IROS 2012 Workshop on Progress, Challenges
and Future Perspectives in Navigation and Manipula-
tion Assistance for Robotic Wheelchairs, pages 1–6.
Bonarini, A., Ceriani, S., Fontana, G., and Matteucci, M.
(2013). On the development of a multi-modal au-
tonomous wheelchair. Medical Information Science
Reference (an imprint of IGI Global), Hershey PA.
Caltenco, H., Lontis, E., and Andreasen Struijk, L. (2011).
Fuzzy inference system for analog joystick emula-
tion with an inductive tongue-computer interface. In
Dremstrup, K., Rees, S., and Jensen, M., editors, 15th
Nordic-Baltic Conference on Biomedical Engineer-
ing and Medical Physics (NBC 2011), volume 34 of
IFMBE Proceedings, pages 191–194. Springer Berlin
Heidelberg.
Christensen, H. and Garcia, J. (2003). Infrared Non-Contact
Head Sensor, for Control of Wheelchair Movements.
Assistive Technology: From Virtuality to Reality, A.
Pruski and H. Knops (Eds) IOS Press, pages 336–340.
Demeester, E., H¨untemann, A., Vanhooydonck, D.,
Vanacker, G., Van Brussel, H., and Nuttin, M.
(2008). User-adapted plan recognition and user-
adapted shared control: A bayesian approach to semi-
autonomous wheelchair driving. Autonomous Robots,
24(2):193–211.
Dieter, F., Wolfram, B., Frank, D., and Sebastian, T. (1999).
Monte carlo localization: Efficient position estima-
tion for mobile robots. In IN PROC. OF THE NA-
TIONAL CONFERENCE ON ARTIFICIAL INTELLI-
GENCE (AAAI, pages 343–349.
Fern´andez-Madrigal, J.-A., Galindo, C., and Gonz´alez, J.
(2004). Assistive navigation of a robotic wheelchair
using a multihierarchical model of the environment.
Integrated Computer-Aided Engineering, 11(4):309–
322.
Fox, D., Burgard, W., and Thrun, S. (1997). The dynamic
window approach to collision avoidance. Robotics &
Automation Magazine, IEEE, 4(1):23–33.
Galindo, C., Cruz-Martin, A., Blanco, J., Fern´andez-
Madrigal, J., and Gonzalez, J. (2006a). A multi-agent
control architecture for a robotic wheelchair. Applied
Bionics and Biomechanics, 3(3):179–189.
Galindo, C., Gonzalez, J., and Fernandez-Madrigal, J.-A.
(2006b). Control architecture for human&# 8211;
robot integration: Application to a robotic wheelchair.
Systems, Man, and Cybernetics, Part B: Cybernetics,
IEEE Transactions on, 36(5):1053–1067.
Guo, S., Cooper, R., Boninger, M., Kwarciak, A., and Am-
mer, B. (2002). Development of power wheelchair
chin-operated force-sensing joystick. In [Engineering
in Medicine and Biology, 2002. 24th Annual Confer-
ence and the Annual Fall Meeting of the Biomedical
Engineering Society] EMBS/BMES Conference, 2002.
Proceedings of the Second Joint, volume 3, pages
2373–2374. IEEE.
Huo, X. and Ghovanloo, M. (2009). Using unconstrained
tongue motion as an alternative control mechanismfor
wheeled mobility. IEEE Transactions on Biomedical
Engineering, 56(6).
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
358

Huo, X. and Ghovanloo, M. (2010). Evaluation of a wire-
less wearable tongue-computer interface by individ-
uals with high-level spinal cord injuries. Journal of
Neural Engineering, 7(2).
Huo, X., Wang, J., and Ghovanloo, M. (2008). Wire-
less control of powered wheelchairs with tongue mo-
tion using tongue drive assistive technology. An-
nual International Conference of the IEEE Engineer-
ing in Medicine and Biology Society. IEEE Engi-
neering in Medicine and Biology Society. Conference,
2008:4199–4202.
Kim, J., Huo, X., Minocha, J., Holbrook, J., Laumann, A.,
and Ghovanloo, M. (2012). Evaluation of a smart-
phone platform as a wireless interface between tongue
drive system and electric-powered wheelchairs. IEEE
Trans. Biomed. Engineering, 59(6):1787–1796.
Lotte, N. and Andreasen, S. (2006). An inductive tongue
computer interface for control of computers and assis-
tive devices. IEEE Transactions on biomedical Engi-
neering, 53(12):2594–2597.
Lund, M. E., Christensen, H. V., Caltenco Arciniega, H. A.,
Lontis, E. R., Bentsen, B., and Andreasen Struijk, L.
N. S. (2010). Inductive tongue control of powered
wheelchairs. In Proceedings of the 32nd Annual In-
ternational Conference of the IEEE Engineering in
Medicine and Biology Society, pages 3361–3364.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T. B.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). ROS: an
open-source robot operating system. In ICRA Work-
shop on Open Source Software.
Richard, C., Edmund, F., and Rory, A. (2008). How
many people would benefit from a smart wheelchair?
Journal of Rehabilitation Research and Development,
45(1):53–72.
Simpson, R. C. (2004). Smart wheelchairs: A literature
review. Journal of rehabilitation research and devel-
opment, 42(4):423–436.
T. Felzer and R. Nordman (2007). Alternative wheelchair
control. In Proc. Int. IEEE-BAIS Symp., Res. Assistive
Technol., pages 67–74.
Theodoridis, T., Hu, H., McDonald-Maier, K., and Gu, D.
(2013). Kinect enabled monte carlo localisation for a
robotic wheelchair. In Intelligent Autonomous Systems
12, pages 153–163. Springer.
ComparisonofDifferentPowered-wheelchairControlModesforIndividualswithSevereMotorImpairments
359
