
A Fuzzy-rule Based Ontology for Urban Object Recognition
Stella Marc-Zwecker, Khalid Asnoune and C
´
edric Wemmert
ICube Laboratory, BFO team, University of Strasbourg, CNRS, Illkirch Cedex, Strasbourg, France
Keywords:
Ontologies, OWL, SWRL, Fuzzy Logic, Urban Object Recognition, Satellite Images.
Abstract:
In this paper we outline the principles of a methodology for semi-automatic recognition of urban objects from
satellite images. The methodology aims to provide a framework for bridging the semantic gap problem. Its
principle consists in linking abstract geographical domain concepts with image segments, by the means of
ontologies use. The imprecision of image data and of qualitative rules formulated by experts geographers
are handled by fuzzy logic mechanisms. We have defined fuzzy rules, implemented in SWRL (Semantic
Web Rule Language), which allow classification of image segments in the ontology. We propose some fuzzy
classification strategies, which are compared and evaluated through an experimentation performed on a VHR
image of Strasbourg region.
1 INTRODUCTION
In the domain of knowledge representation for image
recognition, we outline the principles of a method-
ology for semi-automatic extraction of urban objects
from Very High Resolution (VHR) satellite images.
This methodology relies on the design and implemen-
tation of ontologies, which are an effective tool for
domain’s knowledge formalization and exploitation
(Gruber, 1993) and for the implementation of reason-
ing. We have defined two ontologies, the domain on-
tology and the image ontology. The domain ontology
(Cravero et al., 2012) describes urban objects at high
level of abstraction (houses, roads, vegetation, rivers,
etc.). The image ontology describes the image itself,
and its components (image objects), which are assem-
blies of segments resulting from the image segmen-
tation process. The ontologies are implemented in
OWL2 (Ontology Web Language) under the Prot
´
eg
´
e-
OWL2 editor (Grau et al., 2008).
The aim of our approach is to propose an
ontology-based framework for addressing the seman-
tic gap problem (Smeulders et al., 2000), which char-
acterizes the lack of concordance between the seman-
tic interpretation of image objects, and the pixel nu-
merical values describing them. Actually, ontologies
have been widely used in the context of image recog-
nition. We give here a brief overview of some sig-
nificant work in this domain. (Maillot and Thon-
nat, 2008) proposed an ontology-based object learn-
ing and recognition system involving different aspects
of cognitive vision. Their approach relies on an on-
tology of visual concepts, such as colour and texture,
which can be seen as an intermediate layer between
domain knowledge and image processing procedures.
However, this kind of learning system requires that
the expert produces examples for each of the concepts
he is looking for.(Athanasiadis et al., 2007) present a
framework for both image segmentation and object
labeling using an ontology in the domain of multime-
dia analysis. In the field of remote sensing, (Fonseca
et al., 2002) propose the construction of ontologies
at different levels of Geographic Information System
(GIS). The ontologies are seen as components, coop-
erating to fulfill the system’s objectives. Indeed, in
GIS’s conception, multiple ontologies are commonly
used to represent different levels of knowledge, but
this leads to complex systems which are difficult to
understand as a whole. (Forestier et al., 2012) pointed
that although ontologies are useful to describe hierar-
chies of concepts and meta-data about image repre-
sentation, they often fail to propose an operable rep-
resentation of the knowledge that can be effectively
used for image interpretation in the domain of re-
mote sensing. They proposed a solution, based on the
construction of a knowledge base, that can be con-
sidered as a starting point for our approach, in the
sense we propose to use the ontologies in an applica-
tive way, in order to provide a semantic labelisation of
the data extracted from the image. The implemented
ontologies have the goal to help to automatically link
image objects (characterized by quantitative values)
153
Marc-Zwecker S., Asnoune K. and Wemmert C..
A Fuzzy-Rule Based Ontology for Urban Object Recognition.
DOI: 10.5220/0005026601530160
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2014), pages 153-160
ISBN: 978-989-758-049-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
with domain objects (characterized by qualitative val-
ues). The problem of mapping between qualitative
and quantitative values is called the symbol anchor-
ing problem (Coradeschi and Saffiotti, 2003).
Our approach also copes to the imprecision of data
due to different types of sensors, sampling of data,
etc. The use of fuzzy logic allows to take this impreci-
sion into account and also facilitates the translation of
expert’s rules which are usually qualitatively formu-
lated in natural language. Our methodology is based
on a multi-level analysis, and implements fuzzy rules
for the classification of the image segments in the on-
tology. These rules are written with SWRL (Seman-
tic Web Rule Language) (Horrocks et al., 2004). The
originality of our approach lies in the fact that, despite
the popularity of fuzzy logic, few works integrate in
the ontologies a fuzzy reasoning in the context of real
world applications (Ghorbel et al., 2010), and partic-
ularly in the domain of urban object recognition (Bel-
giu et al., 2013).
This paper is organized as follows: in section 2,
we show an overview of the proposed ontologies. In
section 3, we outline the principles of a multi-level
methodological framework, which uses fuzzy rules
for the classification of urban objects in the ontology.
In section 4, we present a partial implementation of
the methodology, which is illustrated by an experi-
mental evaluation of the image segments fuzzy clas-
sification, based on their spectral properties. This ex-
perimentation is performed on a VHR urban image of
Strasbourg city. We finally conclude in section 5.
2 ONTOLOGIES OVERVIEW
Ontologies are a natural way to express a hierarchy of
concepts and their properties. They incorporate rea-
soning mechanisms, which allow the classification of
individuals in the most appropriate class. We present
here two ontologies -domain and image ontologies-
that we have implemented to assist the task of semi-
automatic urban object recognition.
2.1 The Domain Ontology
This ontology has been defined in collaboration with
experts geographers who created a dictionary of urban
objects (de Bertrand de Beuvron et al., 2013).
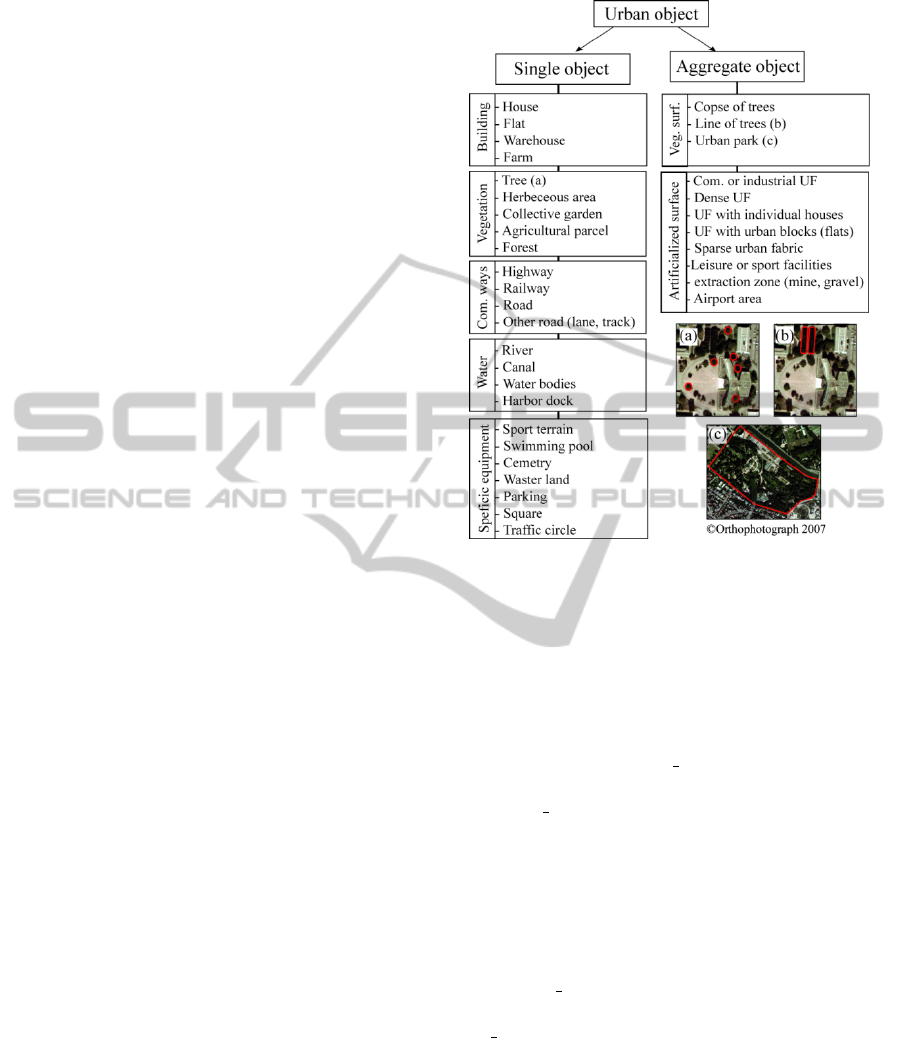
At the higher level of the hierarchy, the objects can
be either (see figure 1):
• single objects, which belong to elementary classes
(building, vegetation, etc.)
• aggregate objects, which are composed of single
objects.
Figure 1: Dictionary of urban objects.
Regarding the spatial relationship, five classical
relations used in GIS have been selected (adjacency,
inclusion, composition, alignment, distance).
Figure 2 shows a global view of the domain ontol-
ogy. For sake of simplicity, we only show the hierar-
chy’s higher concepts. In particular, relations between
concepts, such as composition or inclusion (which
correspond to OWL Object Properties) are omitted in
the figure.
Spatial Relationship concepts correspond to:
• the set of RCC8 (Region Connection Calculus)
spatial relationship, which have been reified to al-
low a consistent computation of the composition
table (Marc-Zwecker et al., 2013).
• the distance relation, which is also reified to con-
nect two objects with a value.
The Geo Object property concept allows the def-
inition of all the attributes which characterize a
Geo Object (size, shape, texture, resolution). The ex-
perts geographers usually associate these attributes to
qualitative values, e.g. large, medium, or small for
the size, rectangular or circular for the shape, homo-
geneous or heterogeneous for the texture.
2.2 The Image Ontology
Let us note that, as for the domain ontology, only the
hierarchy’s higher concepts are shown in the figure
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
154
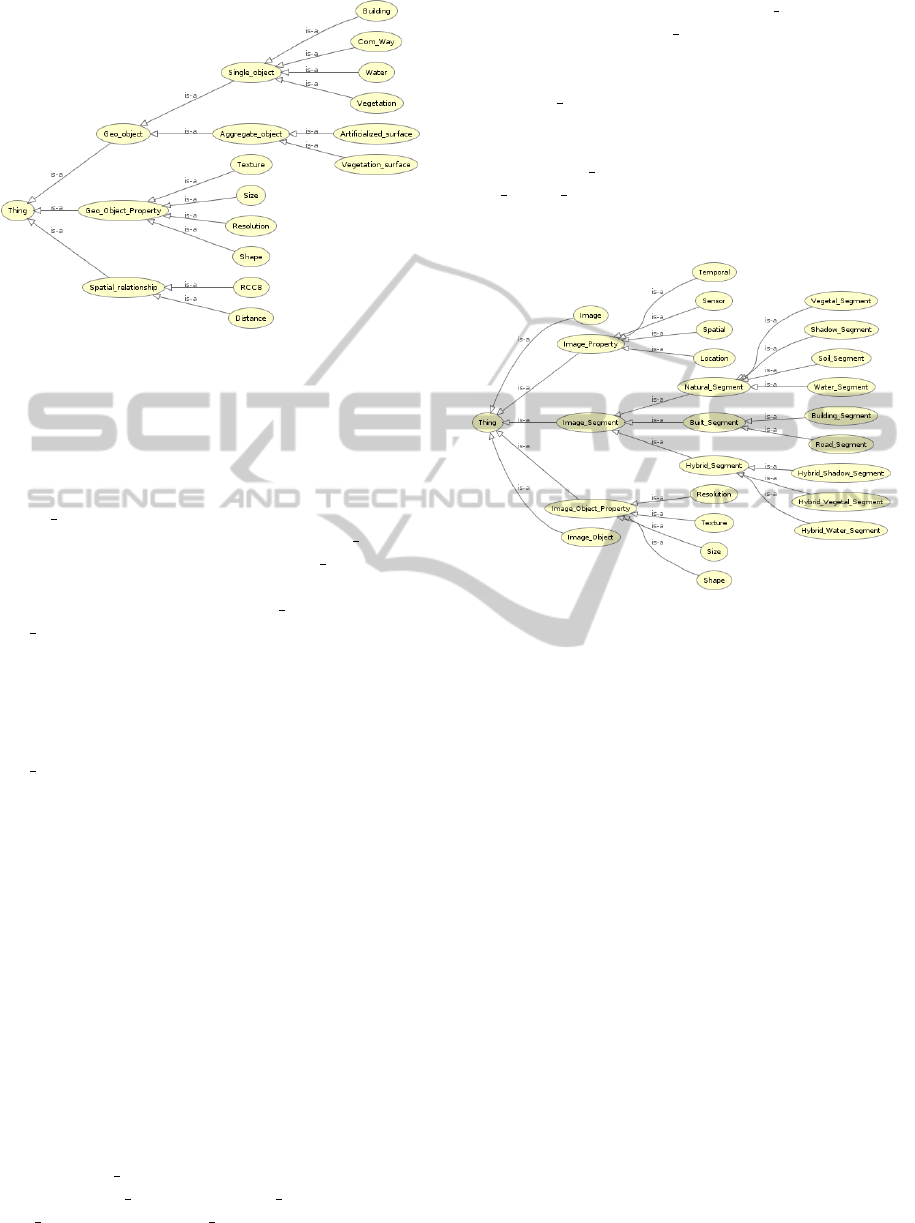
Figure 2: Domain ontology’s higher level concepts.
3. Transversal relations between concepts are also
omitted for sake of simplicity. The higher level con-
cepts of the image ontology have the following mean-
ing: a satellite image (instance of Image concept), is
composed by a set of disjoint segments (instances of
Image Segment concept). The aim of our image pro-
cessing is to correctly assemblate the Image Segment
individuals in order to form an Image Object indi-
vidual. Actually, an ideal segmentation could allow
the fusion of the concepts Image Segment and Im-
age Object. Unfortunately, in practice, within a VHR
urban image, the object of interest is generally asso-
ciated to a set of segments (e.g. a roof is divided in
(at least) two segments, corresponding respectively to
the sunny and shadowy slopes).
The Image concept is described by the Im-
age Property concept, which characterizes the image
itself:
• acquisition properties, such as the type of sensor
used (e.g. LANDSAT, SPOT);
• location properties, such as georeferenced param-
eters, or the geographical region (e.g. Strasbourg,
South of France, etc.).
• temporal properties, such as the date and the hour,
the season, etc.
• spatial properties, such as resolution.
These meta-data are very important for selecting
the rules that will be suitable. In particular, contex-
tual knowledge can play an essential role, such as for
instance the region (e.g. roofs in the South of France
are mainly orange), or the season (the vegetation is
green in spring and yellow in autumn).
The Image Segment concept is subdivided in three
classes : Built Segment, Natural Segment and Hy-
brid Segment. A Natural Segment belongs to a pri-
mary class (water, shadow, vegetal, bare soil). A seg-
ment which is not Natural is a Built Segment (road
or building). The Hybrid Segment is a fuzzy concept
used to characterize segments which could belong to
different classes (e.g. a shadow and vegetal segment).
The Image Segment concept is characterized by OWL
Data Properties, such as spectral and spatial values
and indices.
The Image Object concept is described par Im-
age Object Property concepts, which are global
properties (size, texture, etc.) characterizing a group
of segments.
Figure 3: Image ontology’s higher level concepts.
3 INTEGRATION OF FUZZY
RULES IN THE ONTOLOGY
3.1 Fuzzy Concepts
In the area of urban image recognition, fuzzy logic
mechanisms are used to cope with the imprecision
of acquired data (Shackelford and Davis, 2003; Sui,
1992). On the other hand, fuzzy logic’s formalism
is adequate for the expression of qualitative concepts
(e.g. small, medium, and large) and allows to take
into account the vagueness that is inherent to human
natural language’s descriptions. Consequently it is
well-suited for handling rules formulated by experts
(Dubois and Prade, 2006). We briefly recall the main
fuzzy logic principles that are used in our approach.
3.1.1 Fuzzy Set Theory Elements
Fuzzy set theory was proposed by (Zadeh, 1965) and
aims to address vagueness and imprecise knowledge,
by relaxing the notion of membership to a set. For-
mally, if X is the reference set, a fuzzy subset A of X
is defined by the membership function f
A
(x), which
AFuzzy-RuleBasedOntologyforUrbanObjectRecognition
155

assigns to every x ∈ X, a value in the real interval [0,1].
As in the classical set theory case, 0 corresponds to
non-membership, and 1 to full-membership.
Membership functions are represented by fuzzy
intervals. The most popular ones have a trapezoidal,
triangular, left or right form (Straccia, 2005). The
trapezoidal function trz(x;a, b, c, d) is defined as fol-
lows :
trz(x; a, b, c, d) =
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
0 i f x ≤ a
(x − a)/(b − a) i f x ∈ [a, b]
1 i f x ∈ [b, c]
(d − x)/(d − c) i f x ∈ [c, d]
0 i f x ≥ d
3.1.2 Fuzzy Rules
When we consider a fuzzy rule of the form: ”if X is A
then Y is B”, we need to quantify the degree of influ-
ence between the premise ”X is A” and the conclusion
”Y is B”.
The fuzzy implication operator can be defined
as: f
R
(x, y) = φ( f
A
(x), f
B
(y)), and several gener-
alizations of classical logic implication exist. We
have adopted Mamdani’s inference (Mamdani, 1977),
which is widely used in decision systems : f
R
(x, y) =
min( f
A
(x), f
B
(y)).
3.2 Fuzzy Rules Implementation in the
Ontology
We use Semantic Web Rule Language (SWRL) under
Protege OWL2 to implement ontology’s fuzzy rules,
with Pellet Reasoner. Indeed, (Bobillo and Strac-
cia, 2010) proposed a fuzzy ontology plugin under
Prot
´
eg
´
e, but fuzzy concepts are modelled as anno-
tations, and hence fuzzy classification of concepts is
not straightforward. We have adopted the approach
of (Fudholi et al., 2009), where fuzzy intervals are
directly implemented through SWRL rules, thus al-
lowing us to control the fuzzy classification process
within the ontology.
We show in figure 4 an example of the fuzzy trape-
zoidal intervals associated to shadow and vegetal seg-
ments, for spectral band 4 (Near Infra Red) values.
In section 4 we will present the approach for learning
such spectral values.
SWRL rules that calculate the membership func-
tion associated to the vegetal segment in figure 5 are
directly deduced from the formulae of the trapezoidal
function tr (x; 800, 1000, 1500, 1600) from figure
4 (a=800, b=1000, c=1500, d=1600). The SWRL
syntax is used, and vegetal_band4(?s, ?x) repre-
sents, for the analyzed segment ?s, the value ?x of
Figure 4: Fuzzy intervals associated to shadow and vegetal
segments for NIR (Near Infra Red) values.
its membership to a vegetal segment, with relation to
the NIR (Near Infra Red) band value. Below 800 and
above 1600, the inferred membership value is equal
to zero (the corresponding rules are not shown).
Image-Segment(?s), band4(?s, ?b4),
greaterThanOrEqual(?b4, 800.0f),
lessThan(?b4, 1000.0f),
subtract(?sub, ?b4, 800.0f),
divide(?div, ?sub, 200.0f)
-> vegetal_band4(?s, ?div)
Image-Segment(?s), band4(?s, ?b4),
greaterThanOrEqual(?b4, 1000.0f),
lessThanOrEqual(?b4, 1500.0f)
-> vegetal_band4(?s, 1.0f)
Image-Segment(?s), band4(?s, ?b4),
greaterThan(?b4, 1500.0f),
lessThanOrEqual(?b4, 1600.0f),
subtract(?sub, 1600.0f, ?b4),
divide(?div, ?sub, 100.0f)
-> vegetal_band4(?s, ?div)
3.3 Fuzzy Classification Strategies
The inference mechanism is based on Mamdani’s in-
ference (Mamdani, 1977), with two alternative strate-
gies for the calculation of the membership value asso-
ciated to the rule’s premises:
• in the first strategy, the calculated membership
value corresponds to the minimum of membership
values of the premise’s elementary fuzzy propo-
sitions. We call this strategy CMI, for Classical
Mamdani Inference ;
• in the second strategy, the calculated member-
ship value corresponds to the weighted average
of membership values of the premise’s elementary
fuzzy propositions. We call this strategy WAMI,
for Weighted Average Mamdani Inference.
In our approach, the conclusion function trivially
corresponds to the searched membership degree (e.g.
the degree for ”is vegetal”). Therefore the conclusion
can be merely modelled by the identity function with
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
156
a membership degree of 1. Hence, the Mamdani’s in-
ference simply consists in copying the membership
degree that has been computed for the rule’s premise
(by any of the strategies) into the conclusion’s mem-
bership degree.
The defuzzification process will consist in apply-
ing the ”Smallest of Maximum” method, thus return-
ing the value of the membership degree calculated by
the Mamdani’s inference.
The final crisp decision (e.g. vegetal segment)
is then submitted to a threshold (e.g. 0.7). Within
our method, a segment can be classified into different
classes (e.g. vegetal and shadow) with distinct mem-
bership values, since this corresponds to the reality
(e.g. the shadow on a meadow).
The following SWRL rule illustrates the WAMI
strategy, where we consider a simple average (i.e.
the same weight for all the rule’s premisses). The
predicates vegetal_band3, vegetal_band4, and
vegetal_ndvi_index, respectively give the values
of blue band, NIR band, and Normalized Difference
Vegetation Index for a given segment.
Image-Segment(?s),
vegetal_band3(?s, ?vb3),
vegetal_band4(?s, ?vb4),
vegetal_ndvi_index(?s,?vnd),
add(?add1,?vnd, ?vb4),
add(?add,?add1,?vb3),
divide(?div,?add,3)
-> is_vegetal_segment(?s, ?div)
3.4 A Multi-level Methodology for
Urban Object Classification in the
Ontology
Our methodology of semi-automatic urban object
recognition is under implementation. It based on the
following steps:
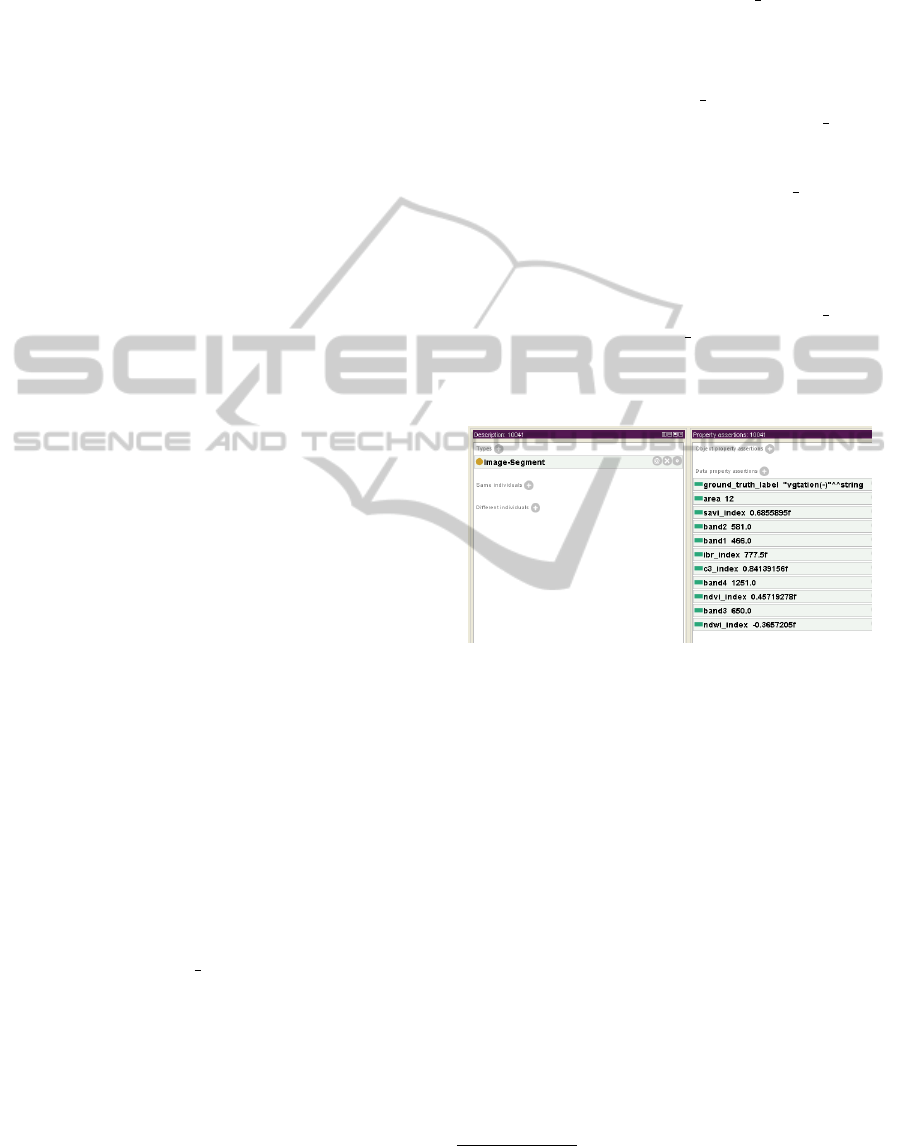
• the satellite image to analyse is first segmented,
using an image segmentation algorithm. The
obtained segments with their attributes are then
loaded in the image ontology under the Prot
´
eg
´
e-
OWL2 editor. Every segment is entered as an in-
dividual in the Image Segment class, and its at-
tributes are associated to OWL Data Properties
(see figure 5).
• all the individuals corresponding to image seg-
ments are then classified in the image ontology,
with the type of fuzzy SWRL rules that we have
presented in the previous section. This first classi-
fication is based on the segments’ spectral proper-
ties, and gives the primary class (vegetation, wa-
ter, shadow, etc.).
• the adjacent segments which belong to the same
primary class after the spectral classification are
then grouped, to constitute Image Object individ-
uals. At this stage, some spatial criteria can be
used. For instance, the adjacency to segments of
shadow allows the detection of buildings.
• finally, the obtained Image Object individuals are
compared to the domain ontology’s Geo Object
concepts, in order to improve the classification.
For example, object’s attributes such as shape or
size will allow to verify if an Image Object in-
dividual classified as a house, corresponds to a
house description according to the domain ontol-
ogy.
As we have stated before, the result of the fuzzy
classification can propose one or several Geo Object
classes for the same Image Object individual, with
distinct membership degrees. This methodology is
currently under development, and so far, we have par-
tially implemented all the steps except the last one.
Figure 5: A segment’s description under Prot
´
eg
´
e editor.
4 EXPERIMENTATION AND
EVALUATION RESULTS
4.1 Learning of the Fuzzy Rules
In these experiments, we used a Pleiades
1
image
of the city of Strasbourg (France) acquired in 2012
and having a resolution of 0.7m/pixel and a size of
9211x11275 pixels. We extracted an area which
presents all the interesting thematic classes we wanted
to identify. Figure 6 presents the segmentation of the
area that was used to learn the fuzzy rules (400x650
pixels).
The spectral fuzzy rules were built based on the
standard attributes and spectral indexes found in liter-
ature, such as NDVI (Normalized Difference Vegeta-
tion Index) or NDWI (Normalized Difference Water
1
Pleiades: Dual optical system for metric resolution ob-
servations (CNES, France)
AFuzzy-RuleBasedOntologyforUrbanObjectRecognition
157

Figure 6: Segmentation used for the learning of the fuzzy
rules.
Index) (Sebari and He, 2013; Bouziani et al., 2010).
To get better rules, more adapted to our type of im-
ages, we tried to combine experiments with theoreti-
cal values. We obtained the experimental values us-
ing a set of samples, extracted by geographical ex-
perts. The images were segmented using the Mean-
shift algorithm (Comaniciu and Meer, 2002). Then,
all the segments were labeled using six ground truth
classes: vegetal, shadow, water, building, road and
soil. The hybrid and unknown class contains the over-
lapped and non-identified segments. Table 1 resumes
the number of labeled segments for each class.
Table 1: Number of labeled segments for each ground truth
class used.
Vegetal 567
Shadow 279
Water 144
Road 86
Soil 113
Building 253
Building (Wall) 44
Hybrid and unknown 477
Total 1963
4.2 Validation
To validate our approach, we have tested the fuzzy
rules that we implemented in SWRL language under
Prot
´
eg
´
e 4.3. We have carried out a two-stage valida-
tion. The first stage points out the effectiveness of the
fuzzy rules in term of f-measure compared to crisp
rules. Moreover, we compared the weighted average
Mamdani inference (WAMI) to the classical Mam-
dani inference (CMI) for the considered example. In
the second stage, the behavior of the fuzzy classifi-
cation was visually analyzed in different types of ar-
eas, which were extracted of the same global image
of Strasbourg region.
For the first scenario, the precision, recall and f-
measure criteria have been calculated.
precision =
t
p
t
p
+ f
p
(1)
recall =
t
p
t
p
+ f
n
(2)
f − measure =
2. precision.recall
precision+recall
(3)
where t
p
stands for true positive (i.e. the number
of items correctly labeled as belonging to the positive
class), f
p
for false positive (i.e. number of items in-
correctly labeled as belonging to the class) and f
n
for
false negative (i.e. items which were not labeled as
belonging to the positive class but should have been).
4.2.1 Comparison of Crisp and Fuzzy
Classification Rules
In this first experimentation, we have used four types
of rules:
• rules based on the small crisp interval (core)
• rules based on the large crisp interval (support).
• rules based on the fuzzy WAMI strategy with a
threshold of 0.7,
• rules based on the fuzzy CMI strategy with a
threshold of 0.7.
Table 2 shows that the precision obtained with
small interval is obviously superior to the precision
obtained with large and fuzzy intervals but with the
lowest recall (and vice versa). The fuzzy interval ob-
tained by applying the WAMI strategy gives the best
f-measure which represents the best compromise be-
tween precision and recall. However, in the partic-
ular case of shadow class, the CMI strategy gives
the best f-measure, while the WAMI strategy gives
the best recall, which seems more interesting for the
classification. Indeed, we observed that shadow seg-
ments belonging to other classes, e.g. vegetal, are
detected as being simultaneously shadow and vege-
tal segments. Thus we assume that during the next
step of the methodology, the use of spatial rules will
enhance the precision. Moreover, as we have already
pointed, getting the maximum recall for the shadow
segments is useful for buildings detection. Conse-
quently, in this experimentation, the WAMI strategy
is the best suited to the classification of image seg-
ments.
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
158

Table 2: Results of the comparison among fuzzy rules (WAMI and CMI strategies with threshold=0.7) and crisp rules.
Small interval Large interval Fuzzy interval WAMI Fuzzy interva CMI
Pr Rec F-meas Pr Rec F-meas Pr Rec F-meas Pr Rec F-meas
Vegetal 0.988 0.155 0.267 0.763 0.966 0.852 0.876 0.864 0.87 0.963 0.47 0.63
Shadow 0.864 0.433 0.576 0.257 1.0 0.408 0.572 0.967 0.718 0.92 0.63 0.74
Water 0.99 0.71 0.82 0.73 0.965 0.831 0.969 0.881 0.922 0.984 0.861 0.917
Soil 0.368 0.371 0.369 0.148 0.991 0.257 0.376 0.672 0.482 0,42 0.292 0.344
4.2.2 Visual Evaluation
To confirm the quality of the results, we also proposed
a visual evaluation. Figure 7 presents the result of the
detection obtained applying the fuzzy rules with the
WAMI strategy to an urban area, similar to the one
used for learning (375x399 pixels). We have super-
posed over the original image the result of our clas-
sification : green areas have been classified as veg-
etation, yellow areas have been classified as shadow,
and red areas correspond to unclassified areas (mostly
vegetation or shadow).
Figure 7: Classified urban area.
5 CONCLUSIONS
We have presented an original work, that attempts to
show the effectiveness of ontologies’ use in the do-
main of urban object recognition from VHR satellite
images. The proposed methodology is under develop-
ment and aims to address the semantic gap and sym-
bol anchoring problems, by providing explicit cor-
respondence mechanisms between an abstract ontol-
ogy, which qualitatively describes the domain’s con-
cepts, and a concrete ontology, which quantitatively
describes the image objects.
Our work takes into account the uncertainty that
is inherent to the acquired data by the implementation
of fuzzy rules in the ontology.
So far, our methodology’s implementation allows
the fuzzy classification of image segments into pri-
mary classes (vegetal, shadow, water, bare soil, build-
ing). When the spectral classification does not affect a
segment to a primary class, the system deduces that it
belongs to an artificial class (building or road). The
distinction between building and road will be done
in a later stage, by using the adjacency to shadow (a
building is adjacent to a shadow, a road is not).
The grouping of segments of the same primary
class into image objects and the buildings detection
are being currently developed. The step of matching
between the domain ontology and the image ontology
will be first applied to the buildings construction. In-
deed, at the current stage, the adjacency to shadow al-
lows the detection of some segments belonging to the
buildings. But unlike the case of objects belonging to
primary classes (vegetation, water, etc.), the assembly
of segments belonging to a building is very difficult
because roofs are dissimilar and their spectral prop-
erties are not stable. It will then be essential to find
the general characteristics of the houses (shape, size,
etc.) in the domain ontology to help the grouping of
buildings’ segments.
A medium term perspective of our work is to in-
tegrate the fuzziness in all stages of the methodology,
and particularly in the image segmentation process.
ACKNOWLEDGEMENTS
All the data sets were produced by UMR7263 LIVE
(Anne Puissant, Simon Rougier, Gregory Skupinski),
for the research project COCLICO (ANR-12-MONU-
001), which funded this work.
REFERENCES
Athanasiadis, T., Mylonas, P., Avrithis, Y., and Kollias, S.
(2007). Semantic image segmentation and object la-
beling. Circuits and Systems for Video Technology,
IEEE Transactions on, 17(3):298–312.
AFuzzy-RuleBasedOntologyforUrbanObjectRecognition
159

Belgiu, M., Lampoltshammer, T. J., Hofer, B., et al.
(2013). An Extension of an Ontology-Based Land
Cover Designation Approach for Fuzzy Rules, volume
2013. Verlag der
¨
Osterreichischen Akademie der Wis-
senschaften.
Bobillo, F. and Straccia, U. (2010). Fuzzy ontology repre-
sentation using owl 2. CoRR, abs/1009.3391.
Bouziani, M., Go
¨
ıta, K., and He, D.-C. (2010). Automatic
change detection of buildings in urban environment
from very high spatial resolution images using exist-
ing geodatabase and prior knowledge. ISPRS Journal
of Photogrammetry and Remote Sensing, 65(1):143–
153.
Comaniciu, D. and Meer, P. (2002). Mean shift: A robust
approach toward feature space analysis. Pattern Anal-
ysis and Machine Intelligence, IEEE Transactions on,
24(5):603–619.
Coradeschi, S. and Saffiotti, A. (2003). An introduction
to the anchoring problem. Robotics and Autonomous
Systems, 43:85–96.
Cravero, M., de Beuvron, F. d. B., Zanni-Merk, C., and
Marc-Zwecker, S. (2012). A description logics geo-
graphical ontology for effective semantic analysis of
satellite images. In KES, pages 1573–1582.
de Bertrand de Beuvron, F., Marc-Zwecker, S., Puissant,
A., and Zanni-Merk, C. (2013). From expert knowl-
edge to formal ontologies for semantic interpretation
of the urban environment from satellite images. Inter-
national Journal of Knowledge-based and Intelligent
Engineering Systems, 17(1):55–65.
Dubois, D. and Prade, H. (2006). La logique floue. REE.
Revue de l’
´
electricit
´
e et de l’
´
electronique, (8):35–41.
Fonseca, F. T., Egenhofer, M. J., Agouris, P., and C
ˆ
amara,
G. (2002). Using ontologies for integrated geographic
information systems. Transactions in GIS, 6(3):231–
257.
Forestier, G., Puissant, A., Wemmert, C., and Ganc¸arski,
P. (2012). Knowledge-based region labeling for re-
mote sensing image interpretation. Computers, Envi-
ronment and Urban Systems, 36(5):470–480.
Fudholi, D. H., Maneerat, N., Varakulsiripunth, R., and
Kato, Y. (2009). Application of prot
´
eg
´
e, swrl and
sqwrl in fuzzy ontology-based menu recommenda-
tion. In Intelligent Signal Processing and Commu-
nication Systems, 2009. ISPACS 2009. International
Symposium on, pages 631–634. IEEE.
Ghorbel, H., Bahri, A., and Bouaziz, R. (2010). Fuzzy
ontologies building method: Fuzzy ontomethodology.
In Fuzzy Information Processing Society (NAFIPS),
2010 Annual Meeting of the North American.
Grau, B., Horrocks, I., Motik, B., Parsia, B., Patel-
Schneider, P., and Sattler, U. (2008). Owl 2: The next
step for owl. Web Semantics: Science, Services and
Agents on the World Wide Web.
Gruber, T. R. (1993). Toward Principles for the Design
of Ontologies Used for Knowledge Sharing. To-
ward Principles for the Design of Ontologies Used for
Knowledge Sharing, 43:907–928.
Horrocks, I., Patel-Schneider, P. F., Boley, H., Tabet, S.,
Grosof, B., and Dean, M. (2004). SWRL: A seman-
tic web rule language combining OWL and RuleML.
W3c member submission, World Wide Web Consor-
tium.
Maillot, E. and Thonnat, M. (2008). Ontology based com-
plex object recognition. Image and Vision Computing,
26(1):102–113.
Mamdani, E. H. (1977). Application of fuzzy logic to ap-
proximate reasoning using linguistic systems. IEEE
Transactions on Computers, 26:1182–1191.
Marc-Zwecker, S., De Beuvron, F. D. B., Zanni-Merk, C.,
Le Ber, F., et al. (2013). Qualitative spatial rea-
soning in rcc8 with owl and swrl. In KEOD 2013-
International Conference on Knowledge Engineering
and Ontology Development.
Sebari, I. and He, D.-C. (2013). Automatic fuzzy object-
based analysis of vhsr images for urban objects extrac-
tion. ISPRS Journal of Photogrammetry and Remote
Sensing, 79:171–184.
Shackelford, A. K. and Davis, C. H. (2003). A combined
fuzzy pixel-based and object-based approach for clas-
sification of high-resolution multispectral data over
urban areas. IEEE T. Geoscience and Remote Sens-
ing, 41(10):2354–2363.
Smeulders, A., Worring, M., Santini, S., Gupta, A., and
Jain, R. (2000). Content-based image retrieval at the
end of the early years. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 22.
Straccia, U. (2005). A fuzzy description logic for the se-
mantic web.
Sui, D. Z. (1992). A fuzzy gis modeling approach for urban
land evaluation. Computers, environment and urban
systems, 16(2):101–115.
Zadeh, L. A. (1965). Fuzzy sets. Information and Control,
8:338–353.
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
160
