
Maritime Emergency Simulation System (MESS)
A Virtual Decision Support Platform for Emergency Response of Maritime
Accidents
Bing Wu, Xinping Yan, Yang Wang and Xiaoyang Wei
Intelligent Transport Systems Research Center (ITSC), Wuhan University of Technology, Wuhan, 430063, China
Engineering Research Center for Transportation Safety (ERCTS, MoE), Wuhan University of Technology, Wuhan, China
Research and Development Base on Waterway Transportation Safety and Anti-pollution of CJRDC Ministry of Transport,
Wuhan University of Technology, Wuhan, China
Keywords: MESS, Key Technology, System Architecture, Application, Emergency Response.
Abstract: This paper presents a maritime emergency simulation system (MESS) for the improvement of emergency
response skills of participants of search and rescue (SAR). Firstly, the system architecture, software and
hardware system are proposed, and the components and function are also introduced. Thus the virtual
environment based on virtual reality is established with the distinguishing advantages of immersive,
intuitiveness, low-cost and interactive. Four main types of accident are implemented in this system, to
accomplish this, five key technologies which have been introduced in MESS are also proposed, among these
technologies, some could enhance the immersive such as the traffic flow simulation and accident logic,
while some advanced technologies could improve the efficiency and feasibility if being applied to the actual
SAR. Moreover, the application domain including skills improvement of participants in SAR, accident
investigation, adaptive decision-making based on scenario analysis, human reliability in emergency
response are also discussed. Finally, the conclusions and further research are remarked.
1 INTRODUCTION
Maritime transportation safety has captured a great
amount of concern in the past decades (Montewka et
al., 2014 and Prabhu Gaonkar et al., 2011).
According to the previously research works, many
effective and useful measures have been proposed in
risk control. Unfortunately though these methods
have benefited us a lot, many accidents still existed
in waterway transportation. Passenger ship
“SEWOL” sinks which has caused 475 people in
distress according to the latest report in 16 April
2014. From the perspective of traditional causal
analysis of accident, human error is the main causes
among all of the possible reasons (Jin et al., 2005 ),
Thus majority of measures focus on the
improvement of seaman reliability and accident
prevention. But few attentions have been paid to the
improvement of the SAR skills once accidents
happened. While in the abovementioned ship
accident, the total loss could be reduced by
reasonable ship disposition and effective passenger
evacuation.
The safety situation in inland maritime
transportation is more complex than open sea area
owing to the strong relationship between
navigational environment and safety situation. Four
distinguishing features of inland waterway
transportation could be briefly summarized. Firstly,
the offshore structures may bring higher stress levels
to the seaman, and in fact, many accidents happened
in the bridge area (Svensson 2009). Secondly, the
risk arises for the relative-close-range collision
avoidance in restricted and narrow waterway (Mou
et al., 2010). Thirdly, apart from the SAR in
maritime accident, inland emergency response
involves the traffic organization and accidental ship
disposition. In our past research (Zhang et al., 2013),
we have discovered that the ship accident many
cause a detention if none efficient method has been
taken in drought season. Finally, as many different
types of ships navigate in the restricted waterway,
the reason and consequence of different types of
ships may vary from each other (Antão et al., 2008a,
Antão et al., 2008b and Sormunen et al., 2013). Thus
the feasible and reasonable method in emergency
155
Wu B., Yan X., Wang Y. and Wei X..
Maritime Emergency Simulation System (MESS) - A Virtual Decision Support Platform for Emergency Response of Maritime Accidents.
DOI: 10.5220/0005039401550162
In Proceedings of the 4th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2014),
pages 155-162
ISBN: 978-989-758-038-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
response becomes a challenging and motivating field
of study.
Virtual simulation system has been proved to be
a practical tool in the skills improvement of
participants owing to its powerful characters of
interactivity, immersive, inexpensive and low risk.
And this advanced technology has been applied to
many domains. For example, Maritime Simulation
System (MSS) was utilized for the training of crew
and pilot (Feng et al., 2012), and the car simulation
(Yu et al., 2013), train simulation (Watanabe et al.,
2011) and military domain (Rizzo et al., 2011).
Moreover, a virtual emergency decision support
system for crew has been proposed by Varela and
Soares (2007). But few system targeted at the
cooperation group decision-making for Rescue
Coordination Centre (RCC), thus a maritime
emergency simulation system (MESS) is required
for the skills improvement of rescuers. MESS is
different from MSS in the following aspects. Firstly,
the participants being trained are different, secondly,
the former focus on the cooperation of multi-person
and the process modelling, while the latter one
concerns more about the accuracy of ship motion.
But the virtual environment is similar in these two
systems.
2 SYSTEM DESIGN
2.1 System Architecture
This study presents a maritime emergency
simulation system that can perform cooperative
disposition among multi-person to represent
different departments using virtual reality
technology. The VR engine generally interfaces the
three-dimensional virtual reality models with the
logistic to undertake given tasks to control the
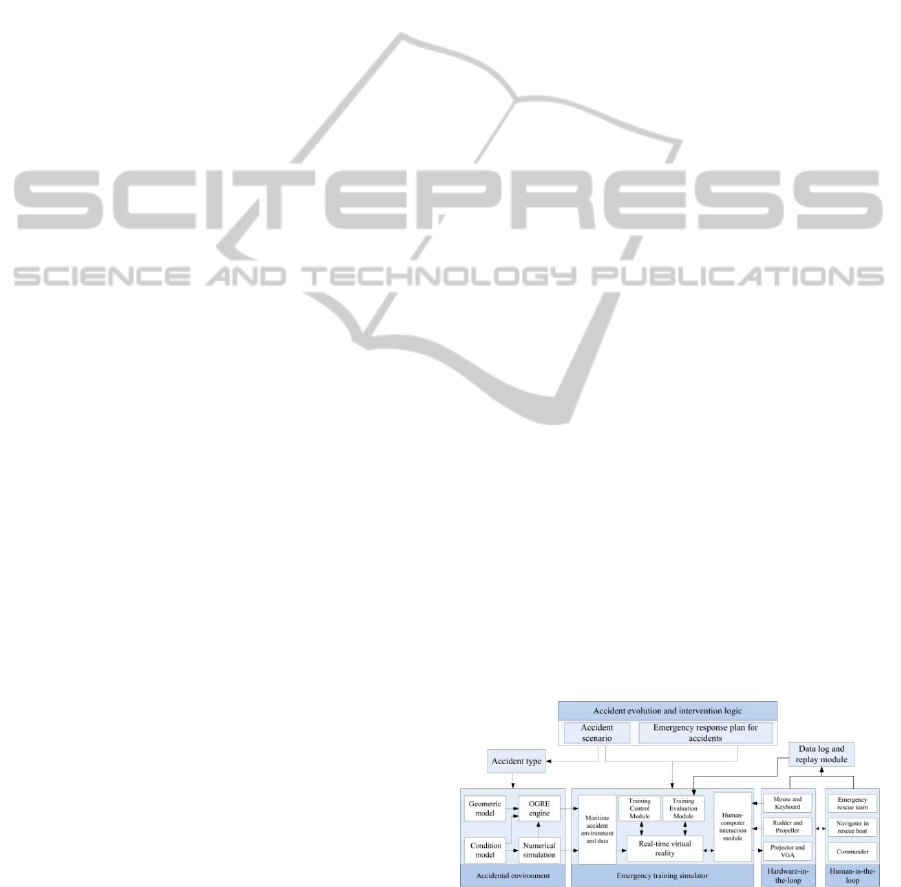
virtual world. The system architecture of MESS is
shown in figure 1.The system involves five
components, the accident evolution and intervention
logic, accident virtual environment, emergency
training simulator, hardware-in-the-loop and human-
in-the-loop. The function of each component is as
follows.
(1) The accident evolution and intervention logic
is crucial for this system as this system is targeted at
accident disposition. This component involves the
accident scenario and emergency response plan for
accidents. In our system, four types of accident
include the collision, grounding, contact, and fire
has been developed, moreover, the accident would
develop into intermediate states and final state over
time, and traffic flow should navigate according to
the regular and emergency traffic regulations. And
the emergency response plan could be dynamic
executed according to the development of accident.
(2) The accident virtual environment includes the
geometric model and conditional model. This could
provide the participants a close to real environment.
The geometric model includes the building,
topography, sky and other background environment
by using a virtual reality technology, in our system,
the OGRE engine is adopted. The conditional model
includes the wind, current, channel, offshore
structures, prerequisite condition for the occurrence
of different types of accidents.
(3) Emergency training simulator is the essential
component to provide a platform that the
participants could interact with each other as well as
the computer. The training control module could set
up the condition to make sure the participants could
cope with different scenarios. Training evaluation
module could assess the performance according to
the data log and replay module. Moreover, a man-
machine interface module has also been designed in
this system.
(4) Hardware-in-the-loop module provides the
hardware utilized in the emergency response
proceeding. The participant could input, edit or
inquire the significant information by using mouse
and keyboard. Specifically, the rudder and propeller
is provided to manoeuvre the SAR ship. The
projector and VGA are used to project display
screen to the projection screen.
(5) Human-in-the-loop. There are three groups of
participants in this system. One group is in the RCC
who is in charge of the SAR. Another group is the
marine patrol ship who is in charge of traffic
organization and plucking people from waters. The
accidental ship is in the charge of the third group,
and the function of this group varies according to the
accident type.
Figure 1: System architecture of MESS.
2.2 Hardware System
As shown in figure 2, the hardware system includes
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
156
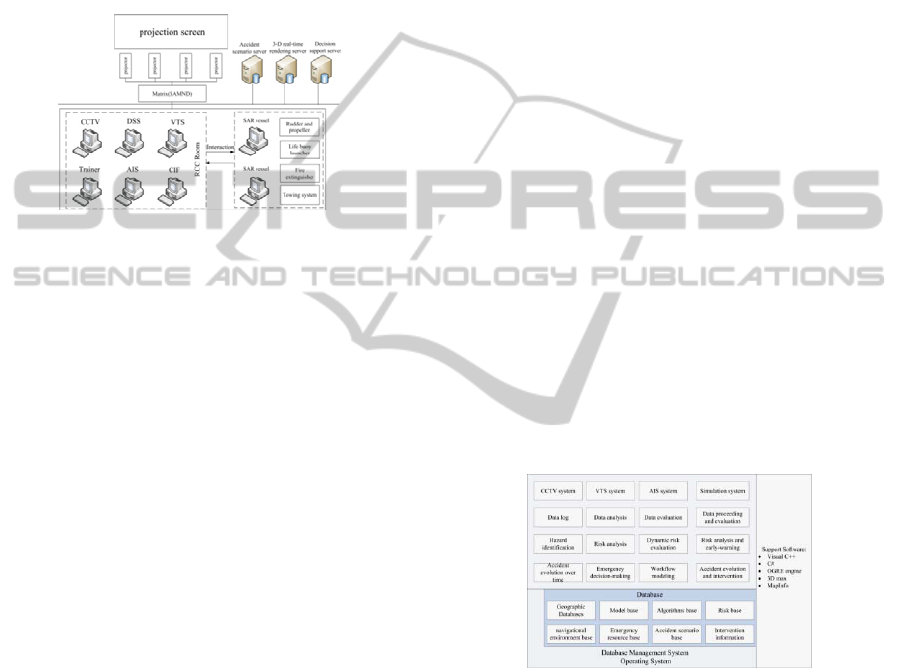
the projection screen system, RCC room and SAR
vessels. Six computers which could simulate the
different types of supervision methods of the RCC
room in China, and the communication between the
servers could be carried out via internet, the
information displayed on the computer screens could
be projected to the projection screen via projector
and VGA. Two computers are used for simulation of
SAR vessels. Specifically, the functions and
composition of hardware system are as follows.
Figure 2: hardware systems of MESS.
(1) There are six computers in the RCC room to
display the different software. The participants of
each group could cooperate in emergency response
in the charge of Commander-in-Chief (CIF);
moreover, the RCC room could communicate with
the SAR ships using radio communication or other
effective methods.
(2) Two computers are used to simulate the SAR
ships. Both of the two ships could be manoeuvred by
using the rudder and propeller to control the course
and speed. The marine patrol ship which could
rescue the man overboard, thus the life buoy
launcher is embedded into the software system.
(3) Three servers are used in this system, one is
for accident scenario server which could set up the
different accident scenarios, one is for the real time
rendering to make sure the virtual environment
immersive, the last one is for decision support which
includes the workflow modelling and cooperation
decision making in emergency response.
2.3 Software System
The software system of MESS could be categorized
into four types according to the intents and purposes.
They are system software, supporting software,
training supporting system and simulation
application system.
(1) System software is the system that could
manage and operate the system resources. It includes
the database management system, network
management system and operating system.
(2) Supporting software includes the Visual C++,
C#, OGRE engine, 3D max and MapInfo. Visual
C++ is the widely used software for MESS; all of
the algorithms are compiled by Visual C++. C# is
unitized for the GUI of MESS, while the virtual
environment adopts the OGRE engine. 3D max is
applied to the three-dimensional modelling of
objects, and MapInfo is the foundation of VTS
(Vessel Traffic Service) and AIS (Automatic
Identification System).
(3) Training supporting system is the system that
could be directly used for simulation. And it is
composed of geographic database, navigational
environment database, emergency resource database,
models, algorithms, accident scenarios and
intervention. The function of the training supporting
system is storage of the data, models and algorithms,
thus it could be extended and developed once a new
requirement is needed.
The models and algorithms which have been
applied to MESS are emergency Workflow models,
early-warning, human behaviour and rescue effect
evaluation in emergency response. All these tools
will be introduced in the following sections.
(4) Simulation application system is the system
that has been developed and could be used in the
process of emergency response. In the MESS, there
are four types of simulation application system,
specifically, the CCTV (Closed Circuit Television)
system, VTS system, AIS system and DSS (Decision
Support System).
Figure 3: software system of MESS.
CCTV system: this system could monitor the
navigation ships in the channel by using cameras,
thus this system is a virtual environment and could
be used for acknowledging whether a ship accident
has happened. VTS system: this system could
monitor the navigation ships according to the signals
of Radar. AIS system: this system could give the
predefined static and dynamic parameters of ship if
the AIS are installed in the ship and available. DSS
system: this system provides five types of significant
information of emergency response, specifically, the
navigational environment, the execution process of
emergency plan, the available emergency resource,
MaritimeEmergencySimulationSystem(MESS)-AVirtualDecisionSupportPlatformforEmergencyResponseof
MaritimeAccidents
157
the rescue information and the parameters of
accidental ships.
3 KEY TECHNOLOGIES FOR
MESS
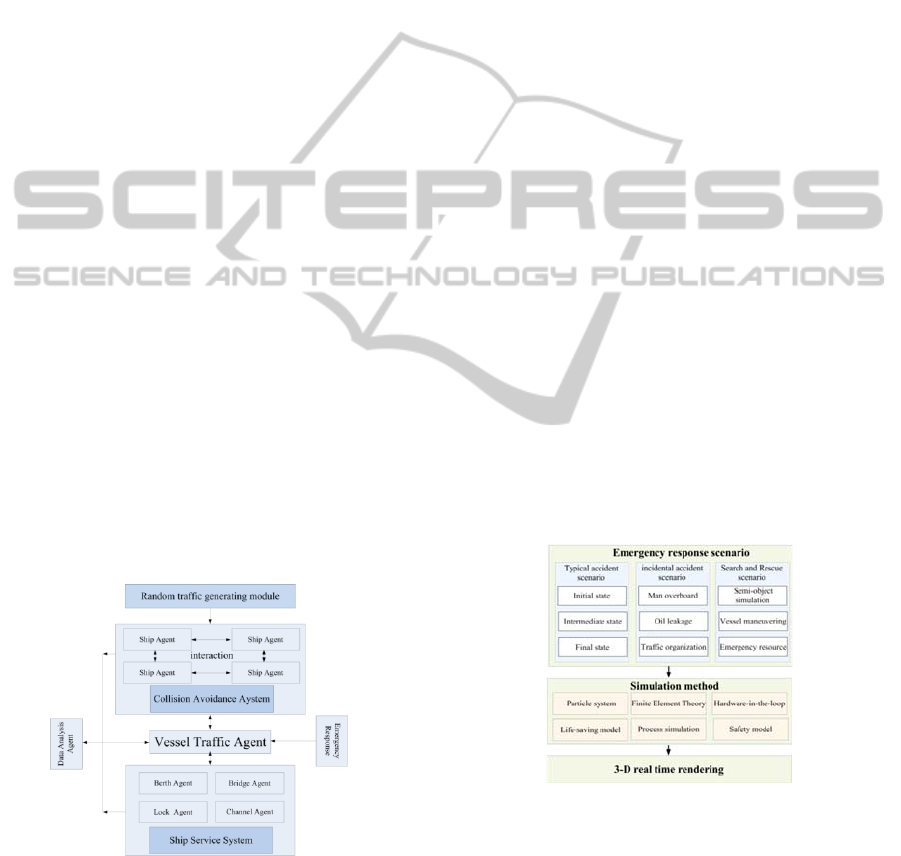
3.1 Traffic Flow Simulation Based on
Multi-Agent
Multi-agent is a widely used method in traffic flow
simulation. For example, de Oliveira and
Camponogara (2010) have applied this technology
to urban traffic networks control. While in waterway
transportation, maritime traffic in piracy-affected
waters is developed by Multi-agent (Vaněk et al.,
2013 and Jakob et al., 2011). In a basic Multi-agent
system, the agents could interact and communicate
with each other which makes the traffic could be
self-organized.
In MESS, if one ship accident happened in the
channel, the traffic flow should initiatively deviate
from the channel or heading to the anchorage to be
far from the scene of accident, thus the traffic
organization would be feasible and effective by
using Multi-agent. The multi-agent system is shown
in figure 4, in regular scenario, once a vessel leave
the wharf, the vessel would interact with the berth,
then navigate in the restricted channel, and make
collision avoidance with the other vessels, then the
traffic flow is established. While navigate from
departure port to destination, the vessel would sail
through the bridge, anchorage, berth and lock by
interaction.
Figure 4: Traffic flow simulation based on Multi-agent.
Thus all these participants would be supposed as
agents. Moreover, since the vessels would navigate
according to the regulations of vessel traffic control
department, and in this system, this would be
supposed as emergency traffic organization, thus this
participant would also be supposed as an agent.
3.2 Early-warning
Early-warning is crucial for incident reduction
which has been widely used in the Yangtze River
MSA (Maritime Safety Administration). This
method divides the hazard into four grades which is
identified as different colours. The principle of this
method is essentially similar with risk assessment.
The difference is that majority of risk assessment
models are based on the historical accident data
(Knapp et al., 2011 and Li et al., 2012) while early-
warning requires the real time data. Mazaheri (et al
2013) presented that the risk should involve the
probability, consequence and risk control option.
This is similar with Formal Safety Assessment
(FSA) (Wang 2001). Though this risk assessment is
dynamic, and in our previously research; the risk
option control method could be evaluated (Wang et
al., 2013). Thus in our MESS, the early-warning tool
had been embedded in AIS system which is shown
in figure 6.
3.3 Accident Logic and Development
Mazaheri (et al 2013) proposes majority of the
accident research focus on the initial state and final
state of accident, but few research concerns about
the intermediate state. In fact, the accident would
develop into different intermediate states; moreover,
the intermediate states would vary according to
different intervention methods.
Figure 5: An accident scenario simulation in MESS.
For example, the fire accident would be
extinguished if fire has been detected immediately
and effective measures have been taken, but it would
explode if none effective measures were taken. In
MESS, the accident would develop according to
intervention measures over time. The simulation of
accident which includes accident evolution, rescue
scenario is shown in figure 5.
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
158

3.3.1 Ship Collision Accident
Montewka (et al 2010) presents a new approach for
the geometrical probability of collision estimation
based on maritime and aviation experience. In his
study, the historical accident data involves different
types of ships, velocity, distance and course is used,
from the result of simulation, this model has a good
agreement with the practical data. Moreover,
Goerlandt and Kujala (2011) propose traffic
collision simulation based probability model. Ship
type, ship dimension, ship speed are considered.
And the consequence of ship collision is related with
materials (Ehlers and Tabri 2012), speed, course and
other factors. In our study, we have collected ship
accident data in the recent years in China and data
mining method has been applied to analysis the
probability and consequence of ship collision.
Furthermore, ship collision with offshore structures
such as bridges has also been developed in MESS.
3.3.2 Ship Grounding Accident
Ship grounding accident is similar with ship
collision. Thus some researchers have taken these
two accidents into consideration in one method
(Pedersen 2010). And the consequence analysis of
grounding could also be carried out by Finite
Element Method (FEM) (AbuBakar and Dow 2013).
But if this method is adopted in MESS, the 3-D real
time rendering would be challenging for this
massive system, and even to impossibly accomplish.
In MESS, we use the historical data to analysis the
probability and consequence of grounding. But for
further research, the data collected from the
simulation result of FEM could be used instead of
the historical data. Moreover, the stability, reserve
buoyancy, sink-resistibility and overturn-preventing
of grounding ship are also taken into consideration.
3.3.3 Man Overboard Accident
Life-saving is especially complex in emergency
response if unavailable or incomplete information
has been collected during the process. Thus many
methods have been applied to life-saving in the open
sea area. For example, the satellite-guided search-
and-rescue-system has been proposed (Kurowski
and Lampe 2014). Moreover, another essential part
of life-saving tool is the drift distance estimation
influenced by current and wind. Ni (et al 2010)
presents an approach to predict the boat drift,
moreover, an operational SAR model for the
Norwegian Sea has also been proposed by (Breivik
and Allen 2008). We have introduced the service
lifecycle model in MESS, and drift model is based
on the current and wind which has not taken the
personal movement into consideration. For further
research, the drift model based on uncertainty and
inaccuracy information should be carried out in
MESS.
3.3.4 Ship Fire Accident
Ship fire accident is a typical accident in maritime
transportation. This accident would develop into
cartography in a RoPax ship or dangerous goods
ship. Thus there is a mandatory requirement on
monthly drills of fire prevention in ocean-going
ship. The fire accident may caused by electronic
failure, human error or other reasons. Wang (et al,
2013) proposes a Monte Carlo method to predict the
process time until the ship explode, and he has
cauterized four different types of parameters to
simulate the time of fire accident. Shichuan (et al
2012) presents a numerical computation approach in
ship engine room. Since the MESS focuses on the
cooperation emergency response of fire accident, the
fire accident only takes the available time and
different types of accident into consideration. But
for further research, the people evacuation model
should also be considered especially for RoPax
ships.
3.4 Workflow Modelling
Workflow modelling is a powerful and practical tool
for transaction management. Petri net is perhaps the
most widely used method among all workflow
modelling methods due to its well defined and easy-
to-understand graphical feature (Salimifard and
Wright 2001). Moreover, the graphical feature
facilitates visual communication between the
exactors involved in the process of execution. At
present, continuous works have been done to cope
with the rapidly changing requirements; however,
majority of traditional workflow modelling
technology could only deal with the predefined
process. Moreover, a well-formed workflow
technology should be intuitiveness and correctness
verification. Thus the emergency workflow
modelling which is used in incident command
system becomes a motivating and challenging field
of study. A Workflow Intuitive Formal Approach
(WIFA) has been proposed by Wang (et al 2008).
This approach defines the workflow into five-tuple.
Specifically, this workflow is represented by task,
precedence matrix, conflict matrix, precondition and
initial state. This method is actually well-defined
MaritimeEmergencySimulationSystem(MESS)-AVirtualDecisionSupportPlatformforEmergencyResponseof
MaritimeAccidents
159

with the distinguishing characters of flexibility,
intuitiveness and correctness verification. Moreover,
this model could be easily modified according to the
special requirements of different systems. The
timeliness analysis, resource consume and decision-
making are the basic problem which should be
studied in emergency response .Timeliness
workflow modelling (Wang 2012) and resource
requirements modelling (Wang et al., 2009) are
proposed for the purpose of timeliness analysis and
resource analysis. In MESS, an improved WIFA is
presented to meet the requirements of multi-
executors and dynamic modification on emergency
workflow modelling.
3.5 Cooperative Group
Decision-making
Group decision-making plays an essential role in
choosing a best or compromise option, and has been
a keen research topic in the field of multiple criteria
decision-making (MCDA). Unlike the classical
MCDA model which only concerns the ranking of
different attributes, group decision-making focuses
on the coordination of the experts when they make
different choices or even conflicting choices (Xu
2007) .This is very common because each expert
may have their preferred orderings of the attributes.
Moreover, the choice of a single expert may be not
persuasive or feasible due to the inherent complexity
or incomplete information in the process of decision-
making. Thus group decision-making is widely used
in order to integrate the experts’ viewpoints and
overcome the partial opinion of single expert. While
applied to the maritime accident emergency response
domain, there are multiple related departments in the
process of decision-making after a maritime accident
occurs, if the decision maker simply considers the
problem from the perspective of his own department,
the decision will be limited in feasibility. Thus all
related suggestions from other departments should
be taken into consideration to obtain a highly
cooperative decision. Unfortunately, little research
work concerns about the multidivisional cooperation
within group decision-making. In order to address
this problem, a multidivisional cooperation model
was introduced in MESS.
4 SYSTEM APPLICATION
INSTANCES
In this section, a collision accident is presented to be
an instance for application of MESS. This accident
happened near the Wuhan Yangzi River Bridge. The
accidental ships are a container ship and a ferry, after
collision a fire accident happened. The emergency
response of this accident could be carried out as
follows. There are eight participants for emergency,
two are representative of marine patrol vessel and
fire extinguishing vessel, and the others are in the
RCC room and each participant is in charge of one
computer.
Firstly, the AIS system discovered the accident
happened in the channel by using early-warning tool,
this tool is shown in figure 6. Then he reported to the
CIF immediately, the CCTV system would check
whether this accident happened according to the
instruction of CIF. Once the accident was
acknowledged, the CIF will ask the VTS system for
ship’s particulars of accidental ships. At this time,
the CCTV reports that somebody was overboard.
Figure 6: Early-warning tool of AIS.
Secondly, the CIF will ask the DSS to inquire the
available emergency resources, and then the CIF will
ask the available SAR vessels heading to the
accident scene by using effective communication
methods.
Figure 7:a scene of emergency response simulation.
Moreover, the choice of closure of the channel is
made by using the cooperative decision-making
system.
Finally, after the fire has been extinguished and
overboard man has been rescued, the evaluation of
emergency response could be given. The scene of
emergency response simulation is shown in figure 7.
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
160

5 APPLICATION OF MESS
5.1 Accident Investigation
The accident investigation method depends mostly
on the evidence obtained by the investigator. Thus
the recorded data plays an important role in
analyzing the reason of the accident. But in fact, the
experts made judgments mainly according to the
experience and professional skills. If the virtual
environment could be established, the experts could
immediately make reasonable judgment. Though this
technology may be still a matter of controversy for
accuracy which mainly depends on the virtual model,
but in future, this technology could be introduced as
an auxiliary method in accident investigation.
5.2 Adaptive Decision-making Based
on Scenario Analysis
The emergency decision-making in ship accident is
crucial for damage control, but this is actually
complex especially in restricted resources scenario.
The ship condition, emergency resources and
navigational environment could be assumed as
available emergency resources; mostly the captain
could only bear an acceptable damage instead of
without loss. Since the accident investigation
focuses on the causal analysis, adaptive decision-
making based on scenario analysis could be carried
out to find out whether a better method could be
adopted. Through that the decision-making skills of
emergency response could be improved.
5.3 Human Reliability in Emergency
Response
Study on the human reliability is essential since
majority of the accident are caused by human error.
In the traditional investigation, the reasons of human
error are roughly treated. But from the perspective of
psychology, the human error may differ from
different scenarios such as stress, fatigue, confidence
etc. As the development of psychology analysis
technology, the galvanic skin and
electroencephalogram-graph could be introduced to
research the human reliability in emergency
response.
6 CONCLUDING REMARKS
The MESS is the pioneering which is targeted at
skills improvement of SAR officers in emergency
response. This system could provide a vivid virtual
environment established by virtual reality for the
participants, thus this system has the distinguishing
advantages of immersive, intuitive, and interactive.
Moreover, this system could provide different
scenarios with the advantage of low-cost and
random-scenario analysis. The accident logic and
intervention method is based on the evolution and
development of ship accidents, thus the emergency
process for participants would effective and useful.
Furthermore, the traffic organization and rescue of
man overboard are also in line with reality, so this
could be applied to the actual SAR in future. This
system could also be used for research domain (i.e.
accident investigation, adaptive decision-making,
human reliability). For further research, the accident
such as stranding should be carried out.
ACKNOWLEDGEMENTS
This Paper is supported by the State Key Program of
National Natural Sciences Foundation of China
(NSFC) (Grant No.51139005) and Research Fund
for the Doctoral Program of Higher Education of
China (Grant No.20130143120014).
REFERENCES
AbuBakar A, Dow R.S. 2013. Simulation of ship
grounding damage using the finite element
method[J]. International Journal of Solids and
Structures, 50(5): 623-636.
Antão P, Almeida T, Jacinto C, et al. 2008a.Causes of
occupational accidents in the fishing sector in
Portugal[J]. Safety Science, 46(6): 885-899.
Antão P, Guedes Soares C. 2008b.Causal factors in
accidents of high-speed craft and conventional ocean-
going vessels[J].Reliability Engineering & System
Safety, 93(9): 1292-1304.
Besnard D, Hollnagel E. 2014. I want to believe: some
myths about the management of industrial safety [J].
Cognition, Technology & Work, 16(1): 13-23.
Breivik Ø, Allen A.A. 2008.An operational search and
rescue model for the Norwegian Sea and the North
Sea [J]. Journal of Marine Systems, 69(1): 99-113.
De Oliveira L.B., Camponogara E. 2010.Multi-agent
model predictive control of signaling split in urban
traffic networks [J]. Transportation Research Part C:
Emerging Technologies, 18(1): 120-139.
Ehlers S, Tabri K. 2012. A combined numerical and semi-
analytical collision damage assessment procedure [J].
Marine Structures, 28(1): 101-119.
Feng M, Li Y. 2012.Ship intelligent collision avoidance
MaritimeEmergencySimulationSystem(MESS)-AVirtualDecisionSupportPlatformforEmergencyResponseof
MaritimeAccidents
161

based on Maritime Police Warships Simulation
System[C]//Electrical & Electronics Engineering
(EEESYM), 2012 IEEE Symposium on. IEEE,:293-296.
Goerlandt F, Kujala P. 2011. Traffic simulation based ship
collision probability modeling [J].Reliability
Engineering & System Safety, 96(1): 91-107.
Jakob M, Vanek O, Pechoucek M. 2011.Using agents to
improve international maritime transport security [J].
Intelligent Systems, IEEE, 26(1): 90-96.
Jin, D., Thunberg, E., 2005.An analysis of fishing vessel
accidents in fishing areas off the northeastern United
States. Safety Science ,43( 8) ,523-540.
Knapp S, Bijwaard G, Heij C. 2011.Estimated incident
cost savings in shipping due to inspections [J].
Accident Analysis & Prevention, 43(4): 1532-1539.
Kurowski M, Lampe B. 2014. AGaPaS: A new approach
for search-and-rescue-operations at sea[J]. Journal of
Engineering for the Maritime Environment: 1-9.
Li S, Meng Q, Qu X. 2012.An overview of maritime
waterway quantitative risk assessment models[J].
Risk Analysis, 32(3): 496-512.
Mazaheri A, Montewka J, Kujala P. 2013.Modeling the
risk of ship grounding—a literature review from a
risk management perspective [J]. WMU Journal of
Maritime Affairs: 1-29.
Montewka J, Hinz T, Kujala P, et al. 2010.Probability
modelling of vessel collisions [J].Reliability
Engineering & System Safety, 95(5): 573-589.
Montewka J, Ehlers S, Goerlandt F, et al. 2014. A
framework for risk assessment for maritime
transportation systems—A case study for open sea
collisions involving RoPax vessels [J]. Reliability
Engineering & System Safety, 124: 142-157.
Mou J.M., Tak C, Ligteringen H. 2010.Study on collision
avoidance in busy waterways by using AIS data [J].
Ocean Engineering, 37(5): 483-490.
Ni Z, Qiu Z, Su T C. 2010. On predicting boat drift for
search and rescue [J].Ocean Engineering, 37(13):
1169-1179.
Pedersen P.T. 2010. Review and application of ship
collision and grounding analysis procedures [J].
Marine Structures, 23(3): 241-262.
Prabhu Gaonkar R.S., Xie M, Ng K.M., et al.
2011.Subjective operational reliability assessment of
maritime transportation system[J]. Expert Systems
with Applications, 38(11): 13835-13846.
Rizzo A, Parsons T.D., Lange B, et al. 2011.Virtual reality
goes to war: a brief review of the future of military
behavioral healthcare [J].Journal of clinical
psychology in medical settings, 18(2): 176-187.
Salimifard K, Wright M. 2001.Petri net-based modelling
of workflow systems: An overview [J].European
journal of operational research, 134(3): 664-676.
Shichuan S, Liang W, Yuhong N, et al. 2012. Numerical
computation and characteristic analysis on the center
shift of fire whirls in a ship engine room fire[J].
Safety science, 50(1): 12-18.
Sormunen O.V.E., Ehlers S, Kujala P. 2013. Collision
consequence estimation model for chemical
tankers[J]. Journal of Engineering for the Maritime
Environment, 227(2): 98-106.
Svensson H. 2009.Protection of bridge piers against ship
collision [J]. Steel Construction, 2(1): 21-32.
Vaněk O, Jakob M, Hrstka O, et al. 2013.Agent-based
model of maritime traffic in piracy-affected waters
[J].Transportation Research Part C: Emerging
Technologies, 36: 157-176.
Varela J.M., Soares C.G. 2007. A virtual environment for
decision support in ship damage control [J].
Computer Graphics and Applications, IEEE, 27(4):
58-69.
Wang J. 2001. The current status and future aspects in
formal ship safety assessment [J]. Safety Science,
38(1): 19-30.
Wang, J. Rosca, D. Tepfenhart, W. et al. 2008. Dynamic
workflow modeling and analysis in incident command
systems [J]. Systems, Man and Cybernetics, Part A:
Systems and Humans, IEEE Transactions on, 38(5):
1041-1055.
Wang, J. Tepfenhart, W. & Rosca, D. 2009. Emergency
response workflow resource requirements modeling
and analysis [J]. Systems, Man, and Cybernetics, Part
C: Applications and Reviews, IEEE Transactions on,
39(3): 270-283.
Wang, J. 2012. Emergency Healthcare Workflow
Modeling and Timeliness Analysis [J]. Systems, Man
and Cybernetics, Part A: Systems and Humans, IEEE
Transactions on, 42(6): 1323-1331.
Wang J, Chu G, Li K. 2013. Study on the uncertainty of
the available time under ship fire based on Monte
Carlo sampling method [J]. China Ocean
Engineering, 27: 131-140.
Wang Y, Zhang J, Chen X, et al. 2013. A spatial–temporal
forensic analysis for inland water ship collisions
using AIS data [J]. Safety science, 57: 187-202.
Watanabe N, Maki Y, Shimomura T, et al. 2011.
Hardware-in-the-loop simulation system for
duplication of actual running conditions of a
multiple-car train consist[J]. Quarterly Report of
RTRI, 52(1):1-6.
Xu Z. 2007. A method for multiple attribute decision
making with incomplete weight information in
linguistic setting[J].Knowledge-Based Systems, 20(8):
719-725.
Yang J.B., Singh Madan G. 1994. An evidential reasoning
approach for multiple-attribute decision making with
uncertainty[J]. Systems, Man and Cybernetics, IEEE
Transactions on, 24(1): 1-18.
Yu Y, Kamel A.E., Gong G. 2013. Modeling intelligent
vehicle agent in virtual reality traffic simulation
system[C]//Systems and Computer Science (ICSCS),
2013 2nd International Conference on. IEEE, 274-
279.
Zhang D, Yan X. P., Yang Z.L., et al. 2013.Incorporation
of formal safety assessment and Bayesian network in
navigational risk estimation of the Yangtze River[J].
Reliability Engineering & System Safety
, 118: 93-
105.
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
162
