
Solving Critical Simulation Problems Under Emergency Conditions
Using Volunteer Computing
Darkhan Akhmed-Zaki
1
, Bolatzhan Kumalakov
1
and Grzegorz Dobrowolski
2
1
Faculty of Mechanics and Mathematics, al-Farabi Kazakh National University, Almaty, Kazakhstan
2
Department of Computer Science, AGH University of Science and Technology, Cracow, Poland
Keywords:
Volunteer Computing, Multi-Agent Systems, Simulation.
Abstract:
Paper presents a case study where a multi-agent system based volunteer computing platform is used to solve
critical simulation problem under emergency conditions. As a result, we extend working platform functional-
ity, better utilize agent paradigm and get valuable data on prototype performance. Main resulting novelty is an
advancement in system architecture.
1 INTRODUCTION
Computer scientists developed numerous methods
and technologies for solving large scale computa-
tional problems. They vary from highly dedicated
pulls of servers, such as cloud or grid infrastructures
(see (Amazon, 2013), (Google, 2013)), to volunteer
resource sharing platforms for Internet users ((Ries,
2012), (Balicki et al., 2012)). In every individual case
technology choice depends on computational features
of the problem, user requirements, available hardware
and networking resources.
In business and scientific research, for instance,
it is common to perform resource intensive comput-
ing using scalable grid and cloud solutions. Industry
level service providers, such as (Amazon, 2013) or
(Google, 2013), guarantee system dependability and
platform uptime higher than 99.9%. They are accessi-
ble from any location at any time via standard Internet
connection, significantly reduce ownership costs and
decrease need in IT staff. As a result, they perfectly
satisfy everyday need in intensive computing due to
comparatively cheep virtual solutions and good level
of customer service.
Yet, consider an emergency when computing is
ought to serve as a crisis management tool that pro-
vides necessary information to the stakeholders. Let
one also assume that an access to the cloud or the grid
is lost because of emergency cause (natural disaster).
In this case the result might no longer be needed by
the time restoring connection is complete. Thus, it is
feasible to employ a software platform that makes use
of personal devices provided by public servants, peo-
ple who are being threatened by emergency risks or
anyone else on site.
In (Ahmed-Zaki et al., 2013) we proposed an
agent based volunteer MapReduce architecture for re-
source intensive computing. The final goal is to ex-
tend it into a platform, that is capable of pulling to-
gether a volunteer ad-hoc mobile cloud to solve crit-
ical problems under emergency conditions (such as
described above). In order to achieve this target we
solve several case studies by introducing necessary
design extensions, implementing them in the proto-
type (building it further) and evaluating its perfor-
mance. In this paper we present the first case, where
the platform serves as a tool to solve a numeric simu-
lation problem as part of the overall solution.
Reminder of the paper is structured as follows.
Section 2 introduces the case study. Section 3 gives
an overview of volunteer computing platforms land-
scape and positions our platform on it. Section 4 con-
tains a detailed description of the extended platform
model and architecture concept, followed by imple-
mentation details in Section 5. Finally, Sections 6 and
7 present computational experiment, its results and
conclusions.
2 CASE DEFINITION
Let us consider the real world disaster event.
Fukushima nuclear power station in Japan was dam-
aged by an explosion following an earthquake and
tsunami in March 2011. Explosion released radia-
170
Akhmed-Zaki D., Kumalakov B. and Dobrowolski G..
Solving Critical Simulation Problems Under Emergency Conditions Using Volunteer Computing.
DOI: 10.5220/0005040401700178
In Proceedings of the 4th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2014),
pages 170-178
ISBN: 978-989-758-038-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

tion that spread over heavily populated neighbor re-
gion and, as a result, military forces had to urgently
evacuate people from the local area.
Technological disasters of that kind are character-
ized by uncontrolled and extreme environment where
people lifes are threatened by dangerous pollution that
is spreading over geographical area. The pollution
may be of different physical and chemical nature (i.e.
gas, fluids, radiation, etc.), but its convection dynam-
ics is simulated using methods described in 6.1.
Never mind the polluting element, we are inter-
ested in the means of assisting specialized rescue
teams that try to evacuate people from the disaster
site. (Erickson, 1999) notes that “in the absence of
data and information, emergency response is simply
well-intended guesswork that will most likely result
in significant loss of human life” . In this case in-
formation is a forecast of how the pollution spreads.
Retrieving it requires the system that collects and pro-
cesses relevant data at a real time and supplies output
on site and in acceptable format (Carver and Turoff,
2007), (Turoff, 2002).
Designing such a solution is an ambitious task.
It requires data collection and storage planing, com-
munication management, etc. Moreover, defined dis-
asters domain phenomena are usually described us-
ing differential equations (see (Adam, 2003)) and are
solved by applying complex numeric methods. As a
result, we assume that all the data is collected in prior
and is available when needed. We particularly con-
centrate on the design of a simulation software plat-
form that: (a) may be used in an absence of a connec-
tion to the industrial scale cluster system; (b) makes
use of voluntarily provided personal computer de-
vices of the people at sight; (c) solves numeric prob-
lems; (d) builds on the platform from (Ahmed-Zaki
et al., 2013).
3 BACKGROUND AND RELATED
WORK
Throughout following text an agent or a multi-agent
system will imply using the intelligent agent concept,
as defined in (Wooldridge and Jennings, 1995) and
(Wooldridge, 2001), unless explicitly stated otherwise
in the main body of the text.
3.1 Non-agent Based Volunteer
Solutions
First stream of solutions is based on different Linux
kernel extensions that boot machines in a volunteer
cluster mode. Machines either join a running clus-
ter as processing nodes, or initiate formation of a
new cluster. Such infrastructures may be regarded as
volunteer because machine owner voluntarily donates
its resources by booting specially designed operating
system.
Open source PelicanHPC GNU Linux, Kerrigehed
and OpenSSI are instances of such systems. They
make use of OpenMP and MPI technologies in dif-
ferent variations, and do not facilitate run time cluster
reconfiguration. Their main disadvantage is the need
to install specialized operating system on every node
to launch the cluster, and the need to have a separate
boot driver for every computer architecture to launch
cluster nodes.
Second stream of solutions requires installing a
software application that facilitates job execution. As
a result, the ability to share resources does not depend
on the operating system. Let us consider following
two examples.
BOINC (Ries, 2012) is a working volunteer com-
puting platform that functions over Internet. Central
server divides a job into tasks and posts them to the
server. Volunteers request tasks, execute them and
return their results in exchange for a reward (esti-
mated in credits). Every task is released to two vol-
unteers. When server receives both results they are
compared and, if answers match, both machines are
awarded credits. To join the platform user has to in-
stall a lightweight application that: connects to the
task server, downloads code and input data, performs
processing, returns the result and claims credits.
Comcute system (Balicki et al., 2012) is another
volunteer platform. It requires volunteers to install
Java applet to their Internet browser in order to carry
out job execution. The Java applet requests the job
from Data generator, downloads executable code and
input data from distributor servers, runs the code in
browser window and returns the result back for veri-
fication. Unlike BOINC, Comcute does not make use
of monetary reward to attract the resources, but is sup-
ported by volunteers who are interested in sharing the
final result. For instance, groups of people who are in
danger and their well being depends on the computa-
tional result.
Despite the fact that application based software
overcomes the shortcomings of the first stream solu-
tions, they rely on central server to initiate task exe-
cution and collect the results. It is a single point of
possible failure, i.e. the bottleneck.
SolvingCriticalSimulationProblemsUnderEmergencyConditionsUsingVolunteerComputing
171

3.2 Agent Based Volunteer Solutions
Agent based platforms that solve large scale compu-
tational problems are collectively called “agent grids”
(Manola and Thompson, 1999). In the grid an agent
controls computer resources, manipulates data, man-
ages code execution and handles its result; or it pro-
vides an access to its peripheral devices for collective
use. A set of such agents constitutes a multi-agent
system that solves problems using autonomy and col-
laboration principles (i.e. individual agents do not
execute jobs by themselves, but do so in cooperation
with others).
Agent grid typically has two levels: application
and functional (Manola and Thompson, 1999). Ap-
plication level is a set of requirements that defines
platform characteristics, such as scalability and adapt-
ability. Functional level, on the other hand, consists of
requirements for the computing environment and its
components (i.e. how available resources are linked
to each other).
In (Gangeshwari et al., 2012) authors organize
multiple agent supervised data centers into a hy-
per cubic grid structure. Every data center has pre-
installed execution software, while agents optimize
inter-data center workload distribution and commu-
nication channels load when distributing jobs. How-
ever, on the level of a single data center nodes are
controlled by pre-defined algorithms, thus, are not au-
tonomous.
Another platform of this kind is presented in
(Marozzo et al., 2011). Here, every node is man-
aged by an agent, who are assigned master or slave
role. Master nodes cooperate to organize and man-
age job execution. One of them acts as user inter-
face, whilst others monitor its performance and vol-
untarily take on control if it fails. Slaves, on the other
hand, get commands from master nodes, execute them
and return the result. Node autonomy, in this case, is
utilized at the master level, whilst slaves are directly
managed. In (Dang et al., 2012) authors present simi-
lar solution that extends Gnutella protocol to facilitate
peer-to-peer execution of jobs. In particular software
components called super agents organize themselves
into groups that cooperate to facilitate the execution.
Task initiator becomes master node and other peers
become slaves.
AGrIP (Luo and Shi, 2007), on the other hand, is a
FIPA compliant platform based on MAGE project. It
satisfies two main requirements: creates and manages
a pool of computing machines, and provides standard-
ized build in grid services. In order to do so AGrIP
creates agent roles that target particular functionality
on both application and functional levels.
We develop a platform that is also FIPA compli-
ant and extends Jade framework (Bellifemine et al.,
2007). Following rules apply with respect to agent
autonomy:
1. no node has direct control over others, but may
indirectly influence execution flow. We refer to
this mechanism as supervision and it includes
reducer-mapper and supervisor-reducer relation-
ships as part of system architecture.
2. agents store the data in a distributed fashion so,
that there is no central storage that would create a
bottle neck.
3. supervision includes state duplication on peer de-
vices to allow restarting processes at different
stages and not from the start if needed.
4. agents may independently change roles and/or
take numerous roles (e.g. reducer and supervisor)
at the same time.
Finally, we narrow down agent-grid definition by
merging it with the notion of “scale out” solution (Lin
and Dyer, 2010). Scale out is an architecture type that
offers cluster computing with machines connected to
the network. The difference is - an agent grid does
not necessarily imply changes in execution efficiency
when number of agents changes; whilst, scale out
does, but lacks machine autonomy (freedom to self-
organize at execution time). Thus, agent-grid should
hold following property: an increase in number of
agents should result in increase in computing speedup
and visa versa, while all machines are autonomous at
all levels.
4 PLATFORM MODEL AND
ARCHITECTURE
First, we extend formal description of the volunteer
job execution in the light of the case study require-
ments in 4.1. Then we introduce an algorithm for the
ad hoc mobile cloud composition in 4.2.
4.1 Workload Distribution Function
In order to solve the problem we construct an iterative
scheme that employs domain decomposition method
from (Barry et al., 2004) (figure 1). General comput-
ing domain is divided into arbitary number of sub-
domains (three in the figure) to be dostributed be-
tween nodes and computed in parallel.
We denote entire computation by J and its step by
k, such as J = {k
1
, k
2
, . . . , k
n
}. Here, k represents a
sub-domain to be computed. All steps are performed
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
172

Figure 1: Figure visulizes how general compuing domain is
divided into several sub-domains to be distributed between
nodes for parallel execution.
by a set of computing nodes A = {a
1
, a
2
, . . . , a
m
}. If
step k
n
may be performed by node a
m
, we denote it as
a mapping function k
n
→ a
m
.
Let us use price to reflect device workload and be
computed as a derivative of available resources, de-
vice workload and basic price (equation 1). Every
successful mapping k
i
→ a
j
(1 ≤ i ≤ n, 1 ≤ j ≤ m)
gets computing price p
i jk
assigned by an accepting
computing node.
p
i jk
= f (ω
i jk
, p
b
, b
l
) (1)
Here, p
b
denotes basic resource price, which is set
by device owner; b
l
denotes battery load; and ω
i jk
denotes resources availability at the time, when step k
arrives. ω
i jk
has following descrete values:
ω
i jk
=
1 device free, can map and reduce
0.6 device buisy, can map and reduce
0.3 device can map only
0 otherwise
Computed price for different mappings may not
be the same p
i jk
6= p
l jk
, where i 6= l and 1 ≤ i, l ≤ m.
If they are equal, the conflict is resolved on the first
come first served basis.
After price is computed tuple ((ρ(ω
i jk
), p
i jk
) is re-
turned to initiator node, where p
i jk
is computer price
and ρ(ω
i jk
) is determined as follows:
ρ(ω
i jk
) =
1 ω
i jk
> 0, want to supply services
0 otherwise
Then, issuer returns result of function ϕ(p
i jk
),
which determines executor node. Only in this case
it takes eligibility traces into account:
ϕ(p
i jk
) =
1 ρ(ω
i jk
) = 1, p
i jk
→ min, q
nk
→ max
0 otherwise
Here, q
nk
is the locally stored value of the eligibility
trace. Maximizing it in this case means choosing the
highest available value, thus, minimize time spent to
perform the task.
Client balance cb represents the amount of money
user can spend on services.
Using values stated above distribution function is
formulated as follows:
min
p
n
∑
i=1
ρ(ω
i jk
)ϕ(p
i jk
) (2)
Subject to:
n
∑
i=1
ρ(ω
i jk
)ϕ(p
i jk
) ≤ cb (3)
n
∑
i=1
ρ(ω
i jk
)ϕ(p
i jk
) > 0 (4)
Objective function (2) minimizes overall cost of
performing the job by choosing lowest price at each
step. Constraints ensure that overall solution cost is
always lower than client balance (3) and at least one
path of job execution exists (4).
4.2 Composite Infrastructure Model
Figure 2 pictures computer machines located on a dis-
aster site that are geographically or technologically
grouped into pulls. If one pull initiates a resource de-
manding job and can not satisfy the power demands, it
seeks a resource sharing alliance with others. If such
an alliance is achieved, resources donor pull becomes
“service provider” and its nodes self-organize to exe-
cute part of the overall job.
Figure 2: Several pulls of resources that are locatd at the
disaster site.
From the alliance seeker point of view service
provider choice is not independent, because it has to
merge every time the simulation tasks is launched.
As a result, agents must consider future implications
and immediate consequences of each decision. More-
over, no agent or group of agents may have full infor-
mation about potential service providers. Thus, they
SolvingCriticalSimulationProblemsUnderEmergencyConditionsUsingVolunteerComputing
173

must learn about them through experiencing the con-
sequences of cooperations.
Core of the solution algorithm is a combination
of Sarsa learning algorithm and Boltzmann selection
strategy (Sutton and Barto, 1998). It was argued to
be optimal for solving small scale problems (Coggan,
2004) where learning system exploits best solution
and explores new options at a reasonable rate. Rea-
sonable rate in this case depends on the problem and
should be determined in every separate case.
In order to solve our case, following changes were
introduced into the basic algorithm and the model.
First, system goal is to minimize execution time
and price. While node choice is based on an offer
price, service providers’ execution time ratings are to
be learned through numerous iterations. Thus, agents
should have two modes of learning: for cases when
service providers meet time expectations, and for
cases when they fail. Sarsa learning algorithm makes
use of a parameter called the learning rate. The grater
it is, the more agent tents to explore unknown options.
In other words when service providers successfully
meet expectation it should have lower value and visa
versa.
Second, classic Sarsa learning algorithm updates
only agent choice at time t, thus, leaving out deci-
sions at time t − 1 and earlier. In order to implement
interdependencies of choices we apply the eligibility
trace (Sutton and Barto, 1998). For details lets con-
sider Fig. 3.
Figure 3: Domains of eligibility traces distribution. Plat-
form learns through updating eligibility trace on every iter-
ation.
Figure 3 presents a composite infrastructure that
consists of five pulls that are located in different sub-
networks. Accessability is limited and following are
connectivity rules: C can connect only to A; A can
connect to B and C; B is able to connect to A and D;
D can connect to B and E; and E can only connect to
D.
Selection strategy is executed at infrastructure
connection points (agents that can reach members of
other pulls) at a run time. As a result, it only takes
into account service providers known to the connect-
ing agent, but is not aware of neighbor options. For
instance, if Infrastructure A chooses B, it does not
know that B can not connect to the other pull. Poten-
tially execution could take considerably longer time
to finish and platform fails to meet the requirements.
Eligibility trace is used to update all the interme-
diate reward values with regards to peer infrastruc-
ture availability of the next service provider. Updated
learning algorithm is presented in algorithm 1.
Algorithm 1: Modified Sarsa Learning Algo-
rithm.
Initialize Q(s, a) arbitrarily;
for each episode do
Initialize s;
Choose a from s using policy derived from
Q;
while s is not terminated do
if time exceeds expected then
Q
t+1
(s, a) ←
Q
t
(s, a) + α
high
φ
t
e
t
(s, a) ;
else
Q
t+1
(s, a) ←
Q
t
(s, a) + α
low
φ
t
e
t
(s, a) ;
end
s ← s
0
, a ← a
0
;
end
end
where,
φ
t
= r
t+1
+ γQ
t
(s
t+1
, a
t+1
) − Q
t
(s
t
, a
t
)
e
t
(s, a) =
γλe
t−1
(s, a) + 1 : s = s
t
, a = a
t
γλe
t−1
(s, a) : otherwise
and, s represents environment state, a is an agent
action, Q is a state-action value, α is the learning rate
and γ is the discount factor.
Boltzmann selection strategy determines how
Q(s, a) value is used to make a decision. It takes into
account relative values of Q(s, a) and applies proba-
bility that depends on how one state-action value is
compared to the others. Probability of choosing ac-
tion a at the state s is computed using equation 5. T
is referred to as temperature and determines explo-
ration rate (the higher T is, the higher is the explo-
ration rate).
p =
e
Q(s,a)−max
b
Q(s,b)
T
∑
a
e
Q(s,a)−max
b
Q(s,b
T
(5)
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
174
4.3 Architectural Solution
Figure 4 presents the conceptual scheme of the sys-
tem.
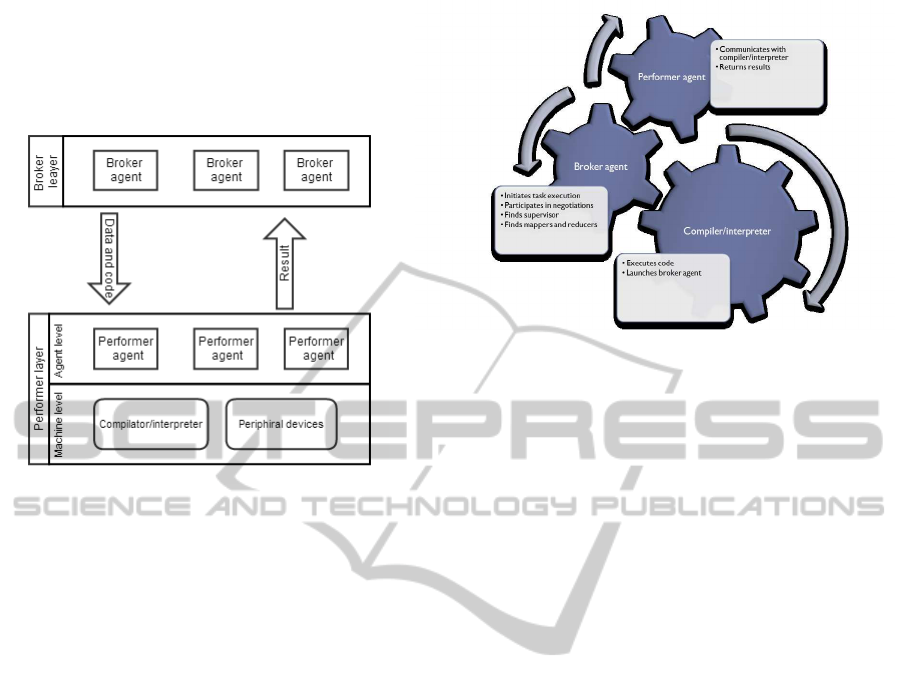
Figure 4: The system consists of broker and perofmer lay-
ers. When brokers pas the task to performer layer, per-
former agents selforganize and pass the instructions to their
own compilator for execution, or to the pheriphiral device.
Broker layer is a collective term that represents all
broker agents active at the given point in time. Per-
former layer, on the other hand, consists of two lev-
els: agent level and machine level. Agent level refers
to potential job performers, who are active at the same
given point in time. Machine level is resources, avail-
able to performer agents.
Every agent has direct access only to its device re-
sources. However, on the diagram they are imaged as
a common pool because eventually they are accessi-
ble to all performers through negotiation.
All system participants are able to take on roles
of broker or/and performer, depending on the situ-
ation. Figure 5 presents high level concept of the
computing node architecture that includes three main
components: broker agent, performer agent and inter-
preter/compilor.
Broker agent is created by interpreter/compiler
when user wants to launch a computing task. It is
responsible for broadcasting information messages,
finding reducer nodes and handling organizational
communication at execution time. Its life cycle is lim-
ited to job execution and when final result is received
by user interface it terminates.
Performer agent runs all the time and listens to job
offers. When execution offer is received, it evaluates
node’s current state and makes a decision whether to
form an offer message or to do nothing. If an offer
is issued to the requesting node, performer is respon-
Figure 5: Performer agent listens to execution calls and
communicates with the light weight compilator/interpriter
interface. When machine launches the task compila-
tor/interpriter interface launches the vroker agent that ini-
tiates the process.
sible for handling upcoming operations. That is find-
ing supervisors, passing executable code to the inter-
preter/compiler, retrieving execution results and send-
ing them to the destination.
Interpreter/compilor gets job logic (code) and is
used to compile/run user applications that launch the
broker agent.
Unlike in previous platform design, performer
agents gets a Linked List type data structure that
stores accessible infrastructures list and correspond-
ing state-action values. Figure 6 presents formalized
job execution and state-action values update process.
5 SYSTEM IMPLEMENTATION
We implemented system prototype using JADE. Exe-
cutable code is encapsulated into ACLMessage object
and passed between agents. Code is executed on Java
Virtual Machine using Clojure-1.4 (PC and server ma-
chines) and JSceme-7.2 (mobile devices).
Agent initialization includes publishing two ad-
vertisements: first, supervision services, second,
MapReduce services. There is no predefined role, be-
cause it depends on self-evaluation at execution time.
Supervisor does not copy reducer state directly, but
knows about changes by listening to duplicated mes-
sages, sent to the reducer. In other words it updates
state record when receives mapper and leaf reducer
message duplicates.
In order to describe job submission and failure
recovery mechanisms we take example scenario that
corresponds to the algorithm described in Figure 6.
SolvingCriticalSimulationProblemsUnderEmergencyConditionsUsingVolunteerComputing
175
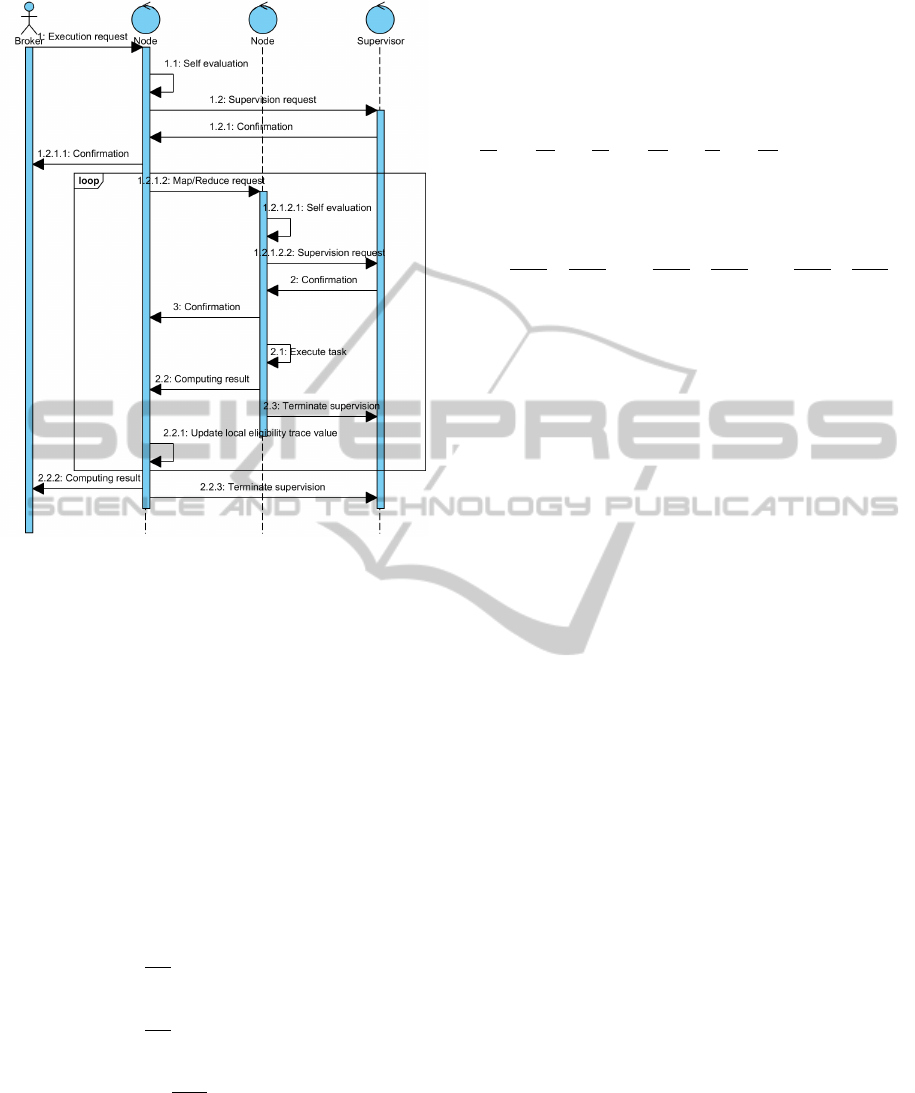
Figure 6: UML Sequence Diagram formalizes job execu-
tion and state-action values update sequence.
6 EXPERIMENT AND
EVALUATION
6.1 Problem Definition
We adopt a large scale physical-technological phe-
nomena that employs well known numeric methods
(as would estimating radiation dissemination) to solve
it.
Problem is specified as follows: consider equa-
tions of water (6) and oil (7) balance, as well as
Darcy’s law (8).
m
∂s
1
∂t
+ div(
−→
u
1
) = q
1
(6)
m
∂s
2
∂t
+ div(
−→
u
2
) = q
2
(7)
−→
u
i
= −
K
0
f
i
µ
i
∇p; (i = 1, 2) (8)
s
1
+ s
2
= 1 (9)
here, m is porosity of media, K
0
is absolute permeabil-
ity of the media, µ
i
is liquid viscosity and f
i
is relative
phase permeability. Index 1 corresponds to the water
phase, and 2 to the oil phase.
Oil deposit is represented as a 3D finite domain Ω
with smooth boundary ∂Ω. We are required to com-
pute pressure p satisfying following equations and re-
lations:
∂
∂x
K
x
∂P
∂x
+
∂
∂y
K
y
∂P
∂y
+
∂
∂z
K
z
∂P
∂z
= − f (x, y, z)
(10)
where,
K
x
=
K
0
x
f
1
µ
1
+
K
0
x
f
2
µ
2
;K
y
=
K
0
y
f
1
µ
1
+
K
0
y
f
2
µ
2
;K
z
=
K
0
z
f
1
µ
1
+
K
0
z
f
2
µ
2
;
(11)
div(
−→
u
1
) + div(
−→
u
2
) = q
1
+ q
2
= f
Initial conditions:
s
1
|
t=0
= s
0
(x) (12)
Boundary conditions:
(p, s
1
) = (p
0
, s
10
), (x,t) ∈ Σ
1
= ∂Ω
1
× [0, T ] (13)
Problem (10)-(13) is solved using Jacobi method.
6.2 Experiment Design
In order to evaluate platform performance we set up
following infrastructure: 13 PCs with 3rd generation
Intel Core i5 processors and 4 Gb of RAM; 3 HP
server machines with Intel Xeon processors and 8, 16
and 16 Gb RAM; HP visualization cluster with 94 vir-
tual machines; and 18 cell phones that run Android
OS.
Machines are organized into three sub-networks
and five architectures as illustrated in Fig. 2 (connec-
tivity rules correspond to those in the figure). Infras-
tructure identity is build into the agent at initiation
time in a form of a private variable. It can not be
changed at execution time and determines agent com-
munications provided that all sub-networks contain a
distributed Jade platform to enable message passing
and communications.
Every infrastructure consists of at least 2 PCS, 1
cell phone, 18 Virtual hosts and some of them have
additional 1 HP Server machine. For installation and
configuration purposes all nodes got the same soft-
ware installed and tested by running sample tasks.
In order to perform the testing we build following
modification: performer agents receives a resource
call, accepts it and with probability of 0.3 does not
proceed to execution. This way we simulate possible
channel failures. If such failure accrues, supervisor
re-launches execution, which results in a time loss.
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
176
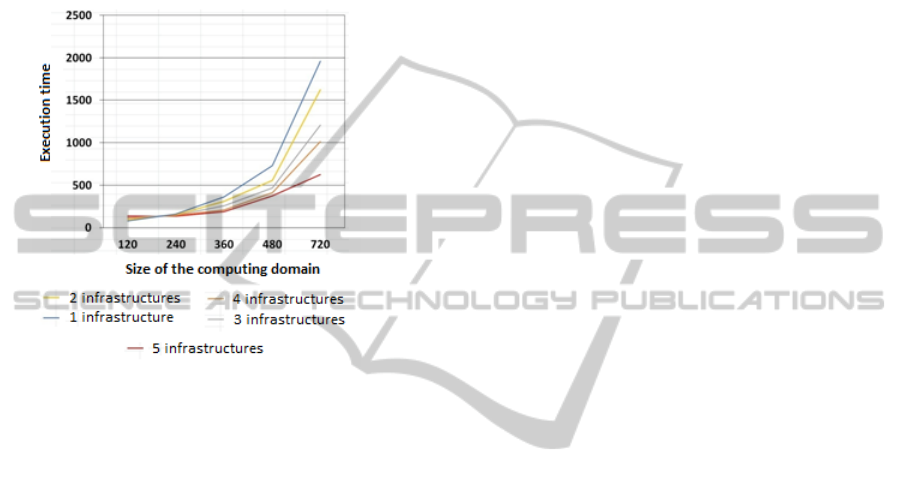
6.3 Experiment Results
Testing consisted of numerous sets of the job runs
with following input sizes: 120, 240, 360, 480 and
720 points (input size is the number of points per
dimension of the hypercube structure). Every set
of runs had different number of sub-infrastructures
avaliable. Figure 7 presents prototype testing results.
Figure 7: Figure presents prototype testing results for 1-6
sub-infrastructure configurations.
First we did get the expected increase in system
performance with the increase in number of available
sub-infrastructures. In particular increasing number
of sub-infrastructures from one to five decreases com-
puting time three times. Of course this coefficient de-
pends on the task and the sub-infrastructures’ connec-
tivity because of the changing merger order and com-
munication channels etc.
After this result was obtained, we compared plat-
form performance to the MPI implementation of the
same task. We run MPI code only using 720x720x720
hypercube using 8-core Intel Xeon Server machine
with 24 Gb of RAM. We do realize that comparison of
the 5 machine distributed system prototype to a 8-core
server machine is not an appropriate academic exper-
iment, but it does provide some impression on the
architecture performance. So after comparing test-
ing data we estimated that our platform gives on av-
erage 500-times slower performance on given input
size. Nonetheless, it is subject to the scale (big data,
number of iterations) and prototype evolution.
7 CONCLUSION
Paper presents our first expansion of the platform
capabilities through solving critical simulation case
study. In particular, we employ agent learning tech-
niques (modified Sarsa algorithm and Boltzmann se-
lection strategy) to form an ad hoc mobile cloud that
solves a simple simulation problem. Experimental
results do confirm execution speed up when num-
ber of available resources increase, but it is not ad-
equately comparable to the classical MPI implemen-
tation yet. On the other hand, we do not claim to
design a multi-agent system that could compete with
well-established parallel execution technologies, but
propose a tool that is capable of solving the defined
task in an absence of an offsite cluster system. Thus,
future work might involve some performance consid-
erations, but not in the light of enchasing parallel ex-
ecution efficiency.
Future work is going to concentrate on further de-
velopment of the platform as a crisis management tool
through utilizing agents’ intellectual features. In par-
ticular, agents may assist in planning and execution of
search and rescue operations at different stages.
ACKNOWLEDGEMENTS
Research is funded under Kazakhstan government
scientific grant Organizing distributed and cloud com-
putation to solve resource demanding tasks.
REFERENCES
Adam, J. (2003). Mathematics in Nature: Modeling Pat-
terns in the Natural World. Princeton University
Press.
Ahmed-Zaki, D., Dobrowolski, G., and Kumalakov, B.
(2013). Peer-to-peer mapreduce platform. In ICAART
(2), pages 565–570.
Amazon (2013). Amazon elastic compute cloud (amazon
ec2).
Balicki, J., Krawczyk, H., and Nawarecki, E., editors
(2012). Grid and Volunteer Computing. Gdansk Uni-
versity of Technology.
Barry, F., Petter, E., and William, G. (2004). Domain De-
composition: Parallel Multilevel Methods for Elliptic
Partial Differential Equations. Cambridge University
Press.
Bellifemine, F. L., Caire, G., and Greenwood, D. (2007).
Developing Multi-Agent Systems with JADE. John Wi-
ley & Sons, NJ.
Carver, L. and Turoff, M. (2007). Human-computer inter-
action: the human and computer as a team in emer-
gency management information systems. Commun.
ACM, 50(3):33–38.
Coggan, M. (2004). Exploration and exploitation in rein-
forcement learning. Technical Report CRA-W DMP,
SolvingCriticalSimulationProblemsUnderEmergencyConditionsUsingVolunteerComputing
177

McGill University, 845 Sherbrooke Street West, Mon-
treal, Quebec, Canada H3A 0G4.
Dang, H. T., Tran, H. M., Vu, P. N., and Nguyen, A. T.
(2012). Applying mapreduce framework to peer-
to-peer computing applications. In Nguyen, N. T.,
Hoang, K., and Jedrzejowicz, P., editors, ICCCI (2),
volume 7654 of Lecture Notes in Computer Science,
pages 69–78. Springer.
Erickson, P. A. (1999). Emergency response planning for
corporate and municipal managers. Academic Press,
San Diego.
Gangeshwari, R., Janani, S., Malathy, K., and Miriam, D.
D. H. (2012). Hpcloud: A novel fault tolerant archi-
tectural model for hierarchical mapreduce. In ICRTIT
2012, pages 179–184. IEEE Computer Society.
Google (2013). Google cloud platform.
Lin, J. and Dyer, C. (2010). Data-Intensive Text Processing
with MapReduce. Synthesis Lectures on Human Lan-
guage Technologies. Morgan & Claypool Publishers.
Luo, J. and Shi, Z. (2007). Distributed system integration
in agent grid collaborative environment. In Integration
Technology. ICIT 07. IEEE International Conference,
pages 373–378. IEEE Computer Society.
Manola, F. and Thompson, C. (1999). Characterizing the
agent grid. Technical Report F30602-98-C-0159, Ob-
ject Services and Consulting, Inc.
Marozzo, F., Talia, D., and Trunfio, P. (2011). A framework
for managing mapreduce applications in dynamic dis-
tributed environments. In Cotronis, Y., Danelutto, M.,
and Papadopoulos, G. A., editors, PDP, pages 149–
158. IEEE Computer Society.
Ries, C. (2012). BOINC - Hochleistungsrechnen mit
Berkeley Open Infrastructure for Network Computing.
Springer-Verlag, Berlin Heidelberg.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement Learn-
ing: An Introduction. The MIT Press, Cambridge,
MA.
Turoff, M. (2002). Past and future emergency response in-
formation systems. Commun. ACM, 45(4):29–32.
Wooldridge, M. and Jennings, N. (1995). Intelligent agents:
Theory and practice. Knowledge Engineering Review,
10(2):115–152.
Wooldridge, M. J. (2001). Multi-agent systems : an intro-
duction. Wiley, Chichester. GBA1-Z6596 Michael
Woolridge.
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
178
