
Evolutionary Tuning of Optimal Controllers for Complex Systems
Jesús-Antonio Hernández-Riveros, Jorge-Humberto Urrea-Quintero and Cindy Carmona-Cadavid
Facultad de Minas,Universidad Nacional de Colombia, Cra. 80 No. 65-223, Medellín, Antioquia, Colombia
Keywords: PID Tuning, Heuristic Algorithm, Integral Performance Criterion, Multidynamics Optimization.
Abstract: The Proportional Integral Derivative controller is the most widely used industrial device for monitoring and
controlling processes. Although there are alternatives to the traditional rules of tuning, there is not yet a
study showing that the use of heuristic algorithms it is indeed better than using the classic methods of
optimal tuning. Current trends in controller parameter estimation minimize an integral performance
criterion. In this paper, an evolutionary algorithm (MAGO - Multidynamics Algorithm for Global
Optimization) is used as a tool to optimize the controller parameters minimizing the ITAE (Integral of Time
multiplied by Absolut Error) performance index. The procedure is applied to a set of standard plants
modelled as a Second Order System Plus Time Delay (SOSPD). Operating on servo and regulator modes
and regardless the plant used, the evolutionary approach gets a better overall performance comparing to
traditional methods (Bohl and McAvoy, Minimum ITAE-Hassan, Minimum ITAE-Sung). The solutions
obtained cover all restrictions and extends the maximum and minimum boundaries between them.
1 INTRODUCTION
A comparative study of performance of different
tuning classical methods for PID (proportional-
integral-derivative) controllers is achieved in
(Desanti, 2004). This study concludes that tuning
methods that require a Second Order System Plus
Time Delay model (SOSPD) perform better than
those that require a First Order Lag Plus time Delay
model (FOLPD). O'Dwyer (2009) reports that 90%
of the tuning rules developed are based on a model
of first and second order plus time delay. The most
frequently tuning rules used are not based on an
integral performance criterion. The optimal tuning
rules based on second-order models are just 14 of
the 84 reported until 2009. In general, those rules are
based on several relationships and/or conditions of
the parameters defining the process model. The
SOSPD model was selected in this paper as
representing the plants in order to compare the
performance of a heuristic algorithm with the "best"
techniques developed for PID controllers optimal
tuning. For SOSPD general models 147 tuning rules
have been defined based on the ideal PID structure
(O’Dwyer, 2009).
In (Mora, 2004; Solera, 2006) the performance
and robustness of some tuning rules are evaluated,
and a complete analysis of the methods of tuning
controllers based on SOSPD is made. Each of the
developed tuning rules for PID controllers has only
been applied to a certain group of processes. Usual
tuning methodologies, such as design based on the
root locus, pole-zero cancellation, location of the
closed-loop poles, among others, require
cumbersome procedures and specialized knowledge.
Additionally, most methods for optimal tuning of
SOSPD require extra system information from
experiments carried out directly on the plant;
activities that are not always possible to perform
because the presence of extreme stresses and
oscillations which may create instability and damage
to the system.
The studies mentioned suggest the lack of a
general rule for tuning PID controllers. Due to the
large number of existing tuning rules it is necessary
to find a tuning method that best satisfies the
requirements of each problem and also ensures
optimal values for the controller parameters
according to the selected performance criterion. The
tuning of controllers that minimize an integral
performance criterion can be established as an
optimization problem consisting of minimizing an
objective function.
There is a trend to develop new methods for
tuning PI and PID controllers (Liu, 2001; Solera,
2005; Tavakoli, 2007), posed as a nonlinear
11
Hernández-Riveros J., Urrea-Quintero J. and Carmona-Cadavid C..
Evolutionary Tuning of Optimal Controllers for Complex Systems.
DOI: 10.5220/0005041100110020
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (ECTA-2014), pages 11-20
ISBN: 978-989-758-052-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

optimization problem. In reviewing the literature is
found that evolutionary algorithms (EA) are applied
to the tuning of controllers on particular cases and
not in the general case as in this paper. Nor are
compared with traditional methods that minimize
some tuning performance index (Chang and Yan,
2004; Junli et al, 2011; Saad et al, 2012a; Saad et al,
2012b). This implies that although there are
alternatives to the traditional rules of tuning, there is
not yet a study showing that the use of heuristic
algorithms it is indeed better than using the
traditional rules of optimal tuning. Hence, this
matter is addressed. Other applications of the EA in
control systems, among them, are system
identification (Hernández-Riveros and Arboleda-
Gómez, 2013) and optimal configuration of sensors
(Michail et al, 2012). The use of an EA for tuning
PID controllers in processes represented by SOSPD
models is proposed in this paper.
This paper is concerned with PID controllers for
processes modeled as SOSPD, optimizing the ITAE
(Integral of Time multiplied by Absolute Error) and
not requiring additional system information.
EA are a proven tool for solving nonlinear
systems and optimization problems. The weaknesses
of these algorithms are in the large number of
control parameters of the EA to be determined by
the analyst and the lack of a solid mathematical
foundation (Whitley, 2001). Looking address these
weaknesses arise recently the Estimation of
Distribution Algorithms, EDA (Lozano, 2006).
These algorithms do not use genetic operators, but
are based on statistics calculated on samples of the
population, which is constantly evolving. This
variant when introduce statistics operators provides
a strong way to demonstrate the evolution.
Nevertheless, they are difficult to manage and do not
eliminate the large number of control parameters of
classical EA. Set a classic EA is itself a difficult
optimization problem; the analyst must try with
probabilities of crossover, mutation, replication,
operator forms, legal individuals, loss of diversity,
etc. Whereas, the EDA require expert skills as the
formulation of simultaneous complex distributions
or the Bayesian networks structure.
For its part, Multi dynamics Algorithm for
Global Optimization (MAGO) also works with
statistics from the evolution of the population
(Hernandez and Ospina, 2010). MAGO is a heuristic
algorithm resulting from the combination of
Lagrangian Evolution, Statistical Control and
Estimation of Distribution. MAGO has shown to be
an efficient and effective tool to solve problems
whose search space is complex (Hernandez and
Villada, 2012) and works with a real-valued
representation. MAGO only requires two parameters
provided by the analyst: the number of generations
and the population size. The traditional EA,
additionally to the number of generations and the
population size requires from the user the definition
of the selection strategy, the individuals’
representation, probabilities of mutation, crossover,
replication, as well as, the crossover type, the locus
of crossing, among others. Depending of its design,
some EA also have extra parameters of tuning as
control variables, number of branch and nodes,
global step size, time constant, etc. (Xinjie and
Mitsuo, 2010). Because of that, MAGO becomes a
good choice as a tool for solving controller tuning as
an optimization problem.
The results obtained by MAGO are compared
with traditional tuning methods not requiring
additional system information. An integral
performance criterion (Integral of Absolute Error –
IAE; Integral of Time multiplied by Absolute Error
–ITAE) is optimized to penalize the error. As it is
further shown, the system model used makes no
difference for the MAGO, because to calculate the
controller parameters only input and output signals
from the closed loop system are required. Regardless
of the relationship between the parameters of the
system (time delay, constant time, etc.) the results
obtained by MAGO overcome those from the
traditional methods of optimal tuning.
This paper begins with an introduction of
controller parameters estimation and performance
index calculation. The tuning of PID controllers on
SOSPD using both the traditional methods and the
evolutionary algorithm MAGO follow. A results
analysis and some conclusions come after.
2 PID CONTROLLER TUNING
The control policy of an ideal PID controller is
shown in equation (1), where E(s) = (R(s) – Y(s)).
The current value Y(s) of the controlled variable is
compared to its desired value R(s), to obtain an error
signal E(s) (feedback). This error is processed to
calculate the necessary change in the manipulated
variable U(s) (control action). Some rules of tuning
controllers are based on critical system information,
on reaction curves and on closed loop tests (
Åström
and Hägglund, 1995).
1
1
d
i
Us Kc TsEs
Ts
(1)
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
12
This paper is concerned to PID controllers for
processes modeled as SOSPD, optimizing the ITAE
and not requiring additional system information.
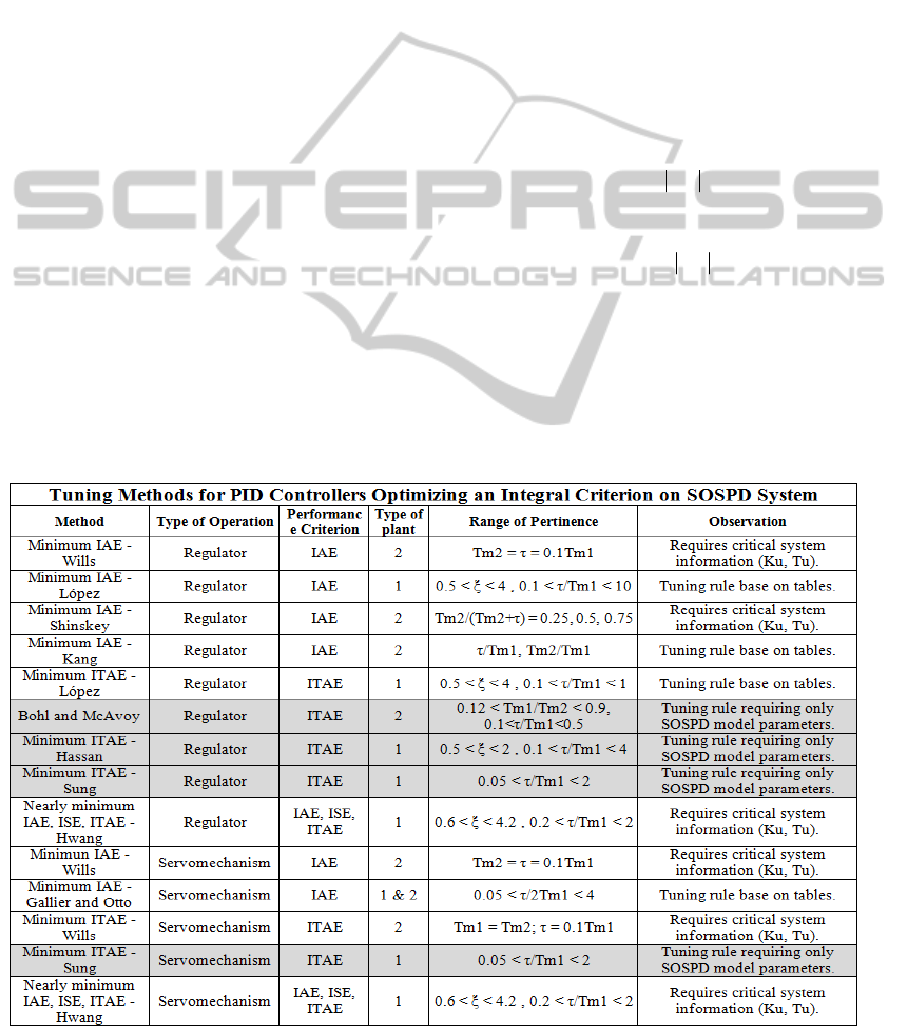
In (O’Dwyer, 2009), it is indicated that 20.7% of
the rules of tuning PID controllers have been
developed from SOSPD models (with or without a
zero in the numerator). This implies 84 rules, 66 of
them do not include the zero in the numerator. Of
these, only 14 optimize an integral performance
criterion, from which 4 rules propose selecting
controller parameters by means of tables and other 6
require additional system information (ultimate gain,
Ku; ultimate frequency, Tu). There are only 4 tuning
rules that optimize an integral performance criterion
and are only function of the SOSPD parameters. For
regulators these rules are: Bohl and McAvoy,
Minimum ITAE - Hassan, Minimum ITAE - Sung;
for servomechanisms: Minimum ITAE - Sung. Table
1 shows the summary of the study, the chosen rules
are shadowed. The equations for the calculation of
proportional gain, Kc; integral time, Ti and
derivative time, Td can be consulted in (Bohl and
McAvoy, 1976; Hassan, 1993; Sung, 1996; Lagunas,
2004). These tuning rules define restrictions on the
behavior of the plant, expressed in the range of
validity.
2.1 Performance Criteria of PID
Controllers
The criterion used for tuning a controller is directly
related to the expected performance of the control
loop. It can be based on desired characteristics of the
response, in time or frequency. Searching for a way
to quantify the behavior of control loops led to the
establishment of performance indexes based on the
error signal, e(t) (feedback). The objective is to
determine the controller setting that minimizes the
chosen cost function. The parameters are optimal
under fixed performance criteria. Of these, the best
known are the so-called integral criteria (
Åström and
Hägglund, 1995), defined in equations (2) and (3).
Integral of Absolute Error
0
()IAE e t dt
(2)
Integral of Time multiplied by Absolut Error
0
()ITAE t e t dt
(3)
Where the error is given by:
e(t) = r(t) – y(t) (4)
r(t) is the reference value, and y(t) is the current
value of the controlled variable, both expressed in
time.
Table 1: PID Controller methods requiring only system parameters and minimizing an integral performance criterion.
EvolutionaryTuningofOptimalControllersforComplexSystems
13

2.2 Plant Parameters and Performance
Indexes
To compare the performance of the studied
controllers it is necessary to tune them with the same
plants. The plant models used are given in equations
(5) and (6) (
Åström and Hägglund, 2000).
22
11
()
21
m
s
p
mmm
Ke
Gs
Ts Ts
(5)
12
()
(1 )(1 )
m
s
p
mm
Ke
Gs
Ts T s
(6)
The following considerations are taken for
equation (5): Kp = 1, τm = 1, ξ = 1 and Tm1 ranging
from 1, 10 and 20. For equation (6), the following
considerations are taken: Kp = 1, τm = 1, Tm1 = 1
and Tm2 = a*Tm1, where a ≤ 1. Table 2 and Table
3 presents a set of transfer functions according to the
parameter values of each plant given by equations
(5) and (6).
Table 2: Transfer Functions of Plants 1, for the tuning.
Plants given by Equation (5)
1_ 1
2
()
21
s
p servo
e
Gs
s
s
1_ 1 1_ 1
() ()
p servo p reg
GsGs
1_ 2
2
()
100 20 1
s
p servo
e
Gs
s
s
1_ 2 1_ 3
() ()
p servo p reg
GsGs
1_ 3
2
()
400 40 1
s
pservo
e
Gs
s
s
1_ 3 1_ 5
() ()
p servo p reg
GsGs
Table 3: Transfer Functions of Plants 2, for the tuning.
Plants given by Equation (6)
2_ 1
()
(1 )(1 0.1 )
s
pservo
e
Gs
s
s
2_ 1 2_ 1
() ()
p servo p reg
GsGs
2_ 2
()
(1 )(1 0.5 )
s
p servo
e
Gs
s
s
2_ 2 2_ 2
() ()
p servo p reg
GsGs
2_ 3
()
(1 )(1 )
s
pservo
e
Gs
s
s
2_ 3 2_ 3
() ()
p servo p reg
GsGs
The values of the PID controller parameters for
each selected tuning rules are presented, further on,
on Table 4. The parameters are calculated according
to the formulas proposed for each kind of plant. The
selected methods for tuning controllers minimize the
integral performance criterion, ITAE. Therefore, in
Table 4, besides the values of controller parameters,
the ITAE is also reported. The ITAE is calculated in
all cases using the commercial software MATLAB
function "trapz". For the Hassan method, the
controller parameter values are not reported because
there was no convergence in the closed loop system
response for the selected plants given by equation
(5), operating as regulator.
3 TUNING PID CONTROLLERS
USING AN EA
Different solutions there may exist in optimization
problems, therefore a criterion for discriminating
between them, and finding the best, is required. The
tuning of controllers that minimize an integral
performance criterion can be seen as an optimization
problem, inasmuch as the ultimate goal is to find the
combination of parameters Kc, Ti and Td, such that
the value of the integration of a variable of interest is
minimal (error between the actual output of the plant
and the desired value).
EA are widely studied as a heuristic tool for
solving optimization problems. They have shown to
be effective in problems that exhibit noise, random
variation and multimodality. Genetic algorithms, for
example, have proven to be valuable in both
obtaining the optimal values of the PID controller
parameters, and in computational cost (Lagunas,
2004). One of the recent trends in EA is Estimation
of Distribution Algorithms (Lozano et al, 2006).
These do not use genetic operators but are based on
statistics from the same evolving population. The
Multidynamics Algorithm for Global Optimization
(MAGO) (Hernández and Ospina, 2010) also works
with statistics from the evolving population. MAGO
is autonomous in the sense that it regulates its own
behavior and does not need human intervention.
3.1 Optimization and Evolutionary
Algorithms
There are techniques used to obtain better results
(general or specific) for a problem. The results can
greatly improve the performance of a process, which
is why this kind of tools is known as optimization.
When speaking of an optimization problem is to
minimize or maximize depending of the design
requirements.
These mean representative criteria of the system
efficiency. The chosen criterion is called objective
function. The design of an optimization problem is
subject to specific restraints of the system, decision
variables and design objectives, which leads to an
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
14

expression such that the optimizer can interpret.
Given its nature of global optimizer, an evolutionary
algorithm (EA) is used in this work. EA have been
used in engineering problems (Fleming and
Purshouse, 2002) and the tuning of PID controllers
(Chang and Yan, 2004, Li, 2006). The late is the
case tries in this work, where successful results have
been obtained. The tuning of controllers that
minimize an
objective function can be formulated as
an optimization problem; it is a case of optimal
control (Vinter, 2000). The optimal control consists
in selecting a control structure (including a PID
controller) and adjusts its parameters such that a
criterion of overall performance is minimized. In the
case of a PID controller (equation 1), the ultimate
goal is to find the combination of the Kc, Ti and Td
parameters, given some restrictions, such that the
value of the integral of a variable of interest (error
between the plant’s actual output and the desired
value or control effort) is minimal. The problem
consists of minimizing an objective function, where
its minimum is the result of obtaining a suitable
combination of the three parameters of PID
controller.
3.2 Multidynamics Algorithm for
Global Optimization
MAGO inspires by statistical quality control for a
self-adapting management of the population. In
control charts it is assumed that if the mean of the
process is out of some limits, the process is
Table 4: PID Controller parameters. (NC* = Not converged; B&M*= Bohl and McAvoy).
Plant (2)
PID Operating as Regulator
ITAE
Kc Ti Td
B&M MAGO B&M MAGO B&M MAGO B&M MAGO
G
P2-reg1
(s)
1.7183 1.4296 1.8978 1.5433 1.8988 0.3341 7.7760 3.1052
G
P2-reg2
(s)
1.0300 1.4656 1.4164 1.5552 1.6702 0.5597 6.8722 3.6071
G
P2-reg3
(s)
0.3092 1.8527 0.5854 1.7791 0.7286 0.7575 3.8073 3.6738
Plant (2)
PID Operating as Servomechanism
ITAE
Kc Ti Td
Hassan MAGO Hassan MAGO Hassan MAGO Hassan MAGO
G
P2-servo1
(s)
N C* 0.5658 N C* 1.6705 N C* 1.0318 NC* 72.6860
G
P2-servo2
(s)
N C* 0.2731 N C* 1.0966 N C* 0.4871 NC* 69.4943
G
P2-servo3
(s)
N C* 0.9074 N C* 2.0666 N C* 0.5258 NC* 63.2413
Plant (1)
PID Operating as Servomechanism
ITAE
Kc Ti Td
SUNG MAGO SUNG MAGO SUNG MAGO SUNG MAGO
G
P1-servo1
(s)
1.2420 1.2318 2.0550 2.1167 0.6555 0.6050 2.0986 2.0486
G
P1-servo2
(s)
9.0500 10.3237 18.009 16.8942 4.9386 5.5162 3.7911 2.8532
G
P1-servo3
(s)
16.4953 19.7929 35.689 29.7905 9.5595 10.7718 3.7937 2.7827
Plant (1)
PID Operating as Regulator
ITAE
Kc Ti Td
SUNG MAGO SUNG MAGO SUNG MAGO SUNG MAGO
G
P1-reg1
(s)
1.8160 1.8557 1.9120 1.7563 0.7073 0.7518 3.8100 3.6623
G
P1-reg2
(s)
12.8460 17.3252 16.7995 7.4691 -1.99e-6 2.3730 894.5522 3.6427
G
P1-reg3
(s)
21.8276 31.8262 37.7393 11.0993 -1.17e-4 3.7005 314.5554 4.4240
EvolutionaryTuningofOptimalControllersforComplexSystems
15

suspicious of being out of control. Then, some
actions should be taken to drive the process inside
the control limits (Montgomery, 2008). MAGO
takes advantage of the concept of control limits to
produce individuals on each generation
simultaneously from three distinct subgroups, each
one with different dynamics. MAGO starts with a
population of possible solutions randomly
distributed throughout the search space. The size of
the whole population is fixed, but the cardinality of
each sub-group changes in each generation
according to the first, second and third deviation of
the actual population. The exploration is performed
by creating new individuals from these three sub-
populations. For the exploitation MAGO uses a
greedy criterion in one subset looking for the goal.
In every generation, the average location and the
first, second and third deviations of the whole
population are calculated to form the groups. The
first subgroup of the population is composed of
improved elite which seeks solutions in a
neighbourhood near the best of all the current
individuals. N1 individuals within one standard
deviation of the average location of the current
population of individuals are displaced in a straight
line toward the best of all, suffering a mutation that
incorporates information from the best one. The
mutation is a simplex search as the Nelder–Mead
method (Xinjie and Mitsuo, 2010) but only two
individuals are used, the best one and the trial one. A
movement in a straight line of a fit individual toward
the best one occurs. If this movement generates a
better individual, the new one passes to the next
generation; otherwise its predecessor passes on with
no changes. This method does not require gradient
information. For each trial individual X
i
(j)
at
generation j a shifted one is created according to the
rule in equation (7).
() () () () ()
() () ()
()
jjjjj
Ti Bm
jjj
XXFXX
FSS
(7)
Where
()j
B
X
is the best individual,
()j
m
X
is an
individual randomly selected. To incorporate
information of the current relations among the
variables, the factor F
(j)
depending on the covariance
matrix is chosen in each generation. S
(j)
is the
population covariance matrix at generation j. This
procedure compiles the differences among the best
individuals and the very best one. The covariance
matrix of the current population takes into account
the effect of the evolution. This information is
propagated on new individuals. Each mutant is
compared to his father and the one with better
performance is maintained for the next generation.
This subgroup, called Emergent Dynamics, has the
function of making faster convergence of the
algorithm.
The second group, called Crowd Dynamics, is
formed by creating N2 individuals from a uniform
distribution determined by the upper and lower
limits of the second deviation of the current
population of individuals. This subgroup seeks
possible solutions in a neighborhood close to the
population mean. At first, the neighborhood around
the mean can be large, but as evolution proceeds it
reduced, so that across the search space the
population mean is getting closer to the optimal. The
third group, or Accidental Dynamics, is the smaller
one in relation to its operation on the population. N3
individuals are created from a uniform distribution
throughout the search space, as in the initial
population. This dynamic has two functions:
maintaining the diversity of the population, and
ensuring numerical stability of the algorithm.
The Island Model Genetic Algorithm also works
with subpopulations (Skolicki, 2005). But in the
Island model, more parameters are added to the
genetic algorithm: number of islands, migration size,
migration interval, which island migrate, how
migrants are selected and how to replace individuals.
Instead, in MAGO only two parameters are needed:
number of generations and population size. On
another hand, the use of a covariance matrix to set
an exploring distribution can also be found in
(Hansen, 2006), where, in only one dynamics to
explore the promising region, new individuals are
created sampling from a Gaussian distribution with
an intricate adapted covariance matrix. In MAGO a
simpler distribution is used.
To get the cardinality of each dynamics, consider
the covariance matrix of the population, S
(j)
, at
generation j, and its diagonal, diag(S
(j)
). If Pob
(j)
is
the set of potential solutions being considered at
generation j, the three groups can be defined as in
equation (8), where: XM(j) = mean of the actual
population. If N1, N2 and N3 are the cardinalities of
the sets G1, G2 and G3, the cardinalities of the
1
2
3
() (())
()
() (())
() 2 (())
() (()), ,
()
() (())
() 2 (())
() 2 (()), ,
()
XM j diag S j x
GxPobj
XM j diag S j
XM j diag S j x
XM j diag S j or
GxPobj
XM j diag S j x
XM j diag S j
x
XM j diag S j or
GxPobj
() 2 (())x XM j diag S j
(8)
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
16

Emergent Dynamics, the Crowd Dynamics and the
Accidental Dynamics are set, respectively, and
Pob(j) = G1 U G2 U G3.
This way of defining the elements of each group
is dynamical by nature. The cardinalities depend on
the whole population dispersion in the generation j.
The Emergent Dynamics tends to concentrate N1
individuals around the best one. The Crowd
Dynamics concentrates N2 individuals around the
mean of the actual population. These actions are
reflected in lower values of the standard deviation in
each of the problem variables. The Accidental
Dynamics, with N3 individuals, keeps the population
dispersion at an adequate level. The locus of the best
individual is different from the population’s mean.
As the evolution advances, the location of the best
individual and of the population’s mean could be
closer between themselves. This is used to self-
control the population diversity. Following is
MAGO’s pseudo code.
MAGO’s pseudo code.
1: j = 0, Random initial population generation
uniformly distributed over the search space.
2: Repeat
3: Evaluate each individual with the objective function.
4: Calculate the population covariance matrix and the
first, second and third dispersion.
5: Calculate the cardinalities N1, N2 and N3 of the
groups
G1, G2 and G3.
6: Select N1 best individuals, modify them according to
equation (7), make them compete and translate the
winners towards the best one. Pass the fittest to the
generation j + 1.
7: Sample from a uniform distribution in hyper
rectangle [LB(j), UB(j)] N2 individuals, pass to
generation j+ 1.
8: Sample
N3 individuals from a uniform distribution
over the whole search space and pass to generation
j+1
9: j = j + 1
10: Until an ending criterion is satisfied.
3.3 Statement of the Problem
An EA represents a reliable approach when
adjusting controllers is proposed as an optimization
problem (Fleming and Purshouse, 2002). Given their
nature of global optimizers, EA could face non-
convex, nonlinear and highly restrictive optimization
problems (Herreros et al, 2002; Tavakoli et al 2007;
Iruthayarajan and Baskar, 2009). The MAGO has
been shown as a very efficient instrument to solve
problems in a continuous domain (Hernandez and
Villada, 2012). Thus, the MAGO is applied as a tool
for estimating the parameters of a PID controller that
minimizes an integral performance index.
In the case where the system is operating as
servomechanism, the control problem consists of
minimizing the integral of the error multiplied by the
time (ITAE). This involves finding the values for the
parameters Kc, Ti y Td, such that the system gets the
desired r(t) value as fast as possible and with few
oscillations. In the case where the system operates as
a regulator, the reference is a constant R, but the
control problem is also to minimize the ITAE index.
This implies, again, finding the values of the
parameters Kc, Ti and Td, but the goal in this mode
is that at the appearance of a disturbance the system
returns as quickly as possible to the point of
operation. The optimization problem is defined in
equation (9).
0
(, , )min
cid ITAE
x
x
J
KTT J tetdt
(9)
3.4 Evolutionary Design of PID
Controller
The controller design is made for the modes servo
and regulator. For the servo, a change in a unit step
reference is applied. For the regulator, the same
change is applied but as a unit step disturbance to
the second-order plant. The controllers are tuned for
the six plants defined in Table 2 and Table 3. The
two parameters of MAGO: number of generations
(ng) and number of individuals (n), are very low and
fixed for all cases (ng = 150, n = 100). MAGO is a
real-valued evolutionary algorithm, so that the
representation of the individual is a vector
containing the controller parameters. The parameters
are positive values in a continuous domain. See
Table 5.
Table 5: Structure of the EA.
Kc Є R
+
Ti Є R
+
Td Є R
+
The fitness function is in equation (9). The error
is calculated as the difference between the system
output and the reference signal. The error is
calculated for each point of time throughout the
measurement horizon. MAGO does not use genetic
operators as crossover or mutation. The adaptation
of the population is based on moving N1 individuals
to the best one with a Simplex Search, creating N2
individuals over the average location of the actual
population and creating N3 individuals through a
uniform distribution over the whole search space, as
previously discussed.
EvolutionaryTuningofOptimalControllersforComplexSystems
17

3.5 Controller Parameters and
Performance Indexes
The comparison between the PID controller
parameters obtained with the traditional tuning rules
and the MAGO algorithm are shown in Table 4.
These values minimize the ITAE. Figure 1 illustrates
the time response, in closed loop, for the plants
given in Table 2 and Table 3. Figure 2 illustrates the
time response of the plants defined by equation (6),
given in Table 3. For this mode of operation, in the
literature review, no tuning rule has been found that
could compute the PID controller parameters
requiring only the parameters of the plant. However,
with MAGO is possible to find controller parameters
that minimize the ITAE, without additional
information and regardless of the operating mode.
The closed-loop system simulations from which the
controller was tuned using the MAGO are presented.
4 ANALYSIS OF RESULTS
The study of traditional tuning methods shows that
despite the large amount of available tuning rules,
there is no one that is effective for the solution of all
control problems based on SISO systems. It is
evident that a single tuning rule applies only to a
small number of problems. A tendency to develop
new methods for tuning PID controllers (Tavakoli et
al, 2007; Iruthayarajan and Baskar, 2009; Solera,
2005; Liu and Daley, 2001) has been noticed. The
most recent are focused on controller’s parameter
calculation achieving a desired performance, where
this index is one of those mentioned before (IAE,
ITAE). Table 4 shows the results when tuning PID
controllers for different plant models based on
equations (5) and (6). The parameters obtained
minimize the ITAE criterion. In the case of plants
based on the model of equation (5), when the system
operates as servomechanism, the tuning rules used
are those proposed by Sung. Obtaining an ITAE
close to 3, the response behavior of the system is a
smooth one, free of oscillations (Figure 1).
For the system operating as a regulator the rules
by Sung are employed. In this case the ITAE value
is considerably higher for plants Gp1_servo3 and
Gp1_servo2, and the system presents oscillations.
From this result, it has to be concluded that the rules
proposed by Sung are a good choice for the system
operating as a servomechanism; while for the case
where the system operates as a regulator the use of
these rules should be reconsidered.
On another hand, in the case of plants operating
as regulators, whose model is given by the equation
(6), the rules proposed by Bohl and McAvoy were
used to calculate the controller parameters. The
results for this experiment are reported in Table 4.
The response of the closed loop system is smooth
using the parameters found by this method. The
value for the ITAE performance index, in all cases,
is below 10. Due to the features that the control
problem has, where the objective is to minimize a
function by a suitable combination of controller
parameters which can be expressed as a function of
cost, the solution is presented as an optimization
problem. The algorithm MAGO is used to calculate
the controller parameters seeking to minimize the
ITAE. The results, reported in Table 4, are compared
with those obtained by the traditional tuning rules.
The results obtained by MAGO were very
satisfactory for all cases. The ITAE performance
index is low when the controller parameters are
calculated by the MAGO, whatever the plant is
represented by equation (5) or equation (6), and for
the two modes of operation, servo and regulator.
Additional to the above, the responses of closed loop
systems where the controller parameters are
obtained using the MAGO could be observed in
Figure 1. These responses are softer and exhibit less
oscillation with respect to the response where
controllers are calculated with traditional methods. It
can be appreciate in the Sung case as regulator, that
the addressed problem has a big variability.
Table 4 also reports the results obtained for the
plant based on equation (6). For this case no
comparative data are available, because the only
traditional tuning rule found that minimizes the
performance index ITAE and requires no additional
system information is proposed by Hassan (See
Table 1). However, in the experiments with this
tuning rule it was not possible to obtain convergence
to a real value of the parameters of the controller and
thus it was not possible to calculate the ITAE.
Whereas with MAGO, requiring only the minimum
information of the model, it was possible to find the
controller parameters reaching an acceptable answer,
because in a finite time less than the open-loop
system settling time the reference value is achieved,
see Figure 2.
Figure 1: Response to step change in the input of the plant
(6), as servomechanism (MAGO only).
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
18

Figure 2: Time response of the plants given by equations (5) and (6), operating as servomechanism and regulator.
5 CONCLUSION
A method of optimal tuning of PID controllers
through the evolutionary algorithm MAGO has been
successfully developed and implemented. The
process resolves the controller tuning as an
optimization problem. The PID controller tuning
was made for SOSPD, without additional knowledge
of the plant. MAGO calculates the parameters of
PID controllers minimizing the ITAE performance
index, and penalizing the error between the
reference value and the output of the plant.
The results showed that MAGO, operating on
servo and regulator modes, gets a better overall
performance comparing to traditional methods (Bohl
and McAvoy (1976), Minimum ITAE - Hassan
(1993), Minimum ITAE - Sung (1996)). Each of
these methods is restricted to certain values on the
behavior of the plant and is limited to an only one
type of operation. The solution obtained with the
evolutionary approach cover all these restrictions
and extends the maximum and minimum between
them. Finally, it should be noted that the MAGO
successful results are obtained regardless of, both,
the plant or controller models used.
ACKNOWLEDGEMENTS
Cindy Carmona-C. was partially supported by the
grant COLCIENCIAS-Jovenes Investigadores 2014.
EvolutionaryTuningofOptimalControllersforComplexSystems
19

REFERENCES
Åström K. J., Hägglund T., 1995. PID controllers: theory,
design and tuning. Instrument Society of America.
Åström K.J., Hägglund T., 2000. Benchmark Systems for
PID Control. IFAC Workshop on Digital Control --
Past, present, and future of PID Control. Spain.
Bohl A. H., McAvoy T. J., 1976. Linear Feedback vs.
Time Optima Control. II. The Regulator Problem.
Industrial & Engineering Chemistry Process Design
and Development, 15(1), 30-33.
Chang W. D., Yan J. J., 2004. Optimum setting of PID
controllers based on using evolutionary programming
algorithm. Journal of the Chinese Institute of
Engineers, 27(3), 439-442.
Desanti J., 2004. Robustness of tuning methods of based
on models of first-order plus dead time PI and PID
controllers (in Spanish). Escuela de Ingeniería
Eléctrica, Universidad de Costa Rica.
Fleming P. J., Purshouse R. C., 2002. Evolutionary
algorithms in control systems engineering: a survey.
Control Engineering Practice, 10(11), 1223-1241.
Hassan G. A., 1993. Computer-aided tuning of analog and
digital controllers. Control and Computers, 21, 1-1.
Hansen N. (2006). The CMA Evolution Strategy. In:
Towards a new evolutionary computation. Lozano,
Larrañaga, Inza, Bengoetxea, Heidelberg, Springer.
Hernández J. A., Ospina J. D., 2010. A multi dynamics
algorithm for global optimization. Mathematical and
Computer Modelling, 52(7), 1271-1278.
Hernández-Riveros Jesús-Antonio, Villada-Cano Daniel.,
2012. Sensitivity Analysis of an Autonomous
Evolutionary Algorithm. Lecture Notes in Computer
Science. Volume 763. Advances in Artificial
Intelligence. Springer.
Hernández-Riveros J., Arboleda-Gómez A., 2013. Multi-
criteria decision and multi-objective optimization for
constructing and selecting models for systems
identification. Trans.Modelling and Simulation, 55.
Herreros A., Baeyens E., Perán J. R., 2002. Design of
PID-type controllers using multiobjective genetic
algorithms. ISA transactions, 41(4), 457-472.
Iruthayarajan M. W., Baskar S., 2009. Evolutionary
algorithms based design of multivariable PID
controller. Expert systems with Applications, 36(5).
Junli L., Jianlin M.. Guanghui Z., 2011. Evolutionary
algorithms based parameters tuning of PID controller.
Control and Decision Conference, IEEE. 416-420.
Lagunas J. 2004. Tuning of PID controllers using a multi-
objective genetic algorithm, (NSGA-II). (in Spanish)
(Doctoral dissertation) Departamento de Control
Automático. Centro de Investigación y de Estudios
Avanzados. México.
Li, Y., Ang, K.H., Chong, G.C., 2006. PID control system
analysis and design. IEEE Control Systems Magazine
26(1), 32-41.
Liu G. P., Daley S., 2001. Optimal-tuning PID control for
industrial systems. Control Engineering Practice,
9(11), 1185-1194.
Lozano J. A., Larrañaga P., Inza I., Bengoetxea E. (Eds.).
2006. Towards a new evolutionary computation:
Advances on estimation of distribution algorithms.
Springer.
Michail, K., Zolotas, A.C., Goodall, R.M., Whidborne,
J.F., 2012. Optimised configuration of sensors for fault
tolerant control of an electro-magnetic suspension
system, International Journal of Systems Science, 43
(10), 1785-1804.
Montgomery D. C., 2008. Introduction to statistical
quality control. John Wiley & Sons. Wiley, New York.
Mora J. 2004. Performance and robustness of the methods
based on second order models plus dead time tuning
PID controllers. (in Spanish). Escuela de Ingeniería
Eléctrica, Universidad de Costa Rica.
Dwyer A., 2009. Handbook of PI and PID controller
tuning rules (Vol. 2). London: Imperial College Press.
Saad M. S., Jamaluddin H., Darus I. Z. M., 2012a. PID
Controller Tuning Using Evolutionary Algorithms.
WSEAS Transactions on Systems and Control. Issue 4.
Saad M. S., Jamaluddin H., Darus I. Z. M., 2012b.
Implementation of PID controller tuning using
differential evolution and genetic algorithms. Int.
Journal of Innovative Computing Information and
Control, 8(11), 7761-7779.
Skolicki Z., De Jong K., 2005. The influence of migration
sizes and intervals on island models. Proceedings of
the conference on Genetic and evolutionary
computation ACM. 1295-1302.
Solera Saborío E. 2005. PI / PID Controller Tuning with
IAE and ITAE criteria for double pole plants. (in
Spanish). Escuela de Ingeniería Eléctrica, Universidad
de Costa Rica.
Sung S. W., Lee O, J., Lee I. B., Yi S. H. 1996. Automatic
Tuning of PID Controller Using Second-Order Plus
Time Delay Model. Journal of chemical engineering of
Japan, 29(6), 990-999.
Tavakoli S., Griffin I., Fleming P. J., 2007. Multi-
objective optimization approach to the PI tuning
problem. Evolutionary Computation Congress. IEEE.
3165-3171.
Vinter, R., 2000. Optimal Control. Systems & Control:
Foundations & Applications. Springer, London.
Whitley Darrell., 2001. An overview of evolutionary
algorithms: practical issues and common pitfalls.
Information and Software Technology. 43(14).
Xinjie Yu, Mitsuo Gen., 2010. Introduction to
Evolutionary Algorithms. Springer, London.
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
20
