
Developing Parallel, Discrete Event Simulations in Python
First Results and User Experiences with the SimX Library
∗
Sunil Thulasidasan
1
, Lukas Kroc
2
and Stephan Eidenbenz
1
1
Los Alamos National Laboratory, Los Alamos, U.S.A.
2
SpaceX, Hawthorne, U.S.A.
Keywords:
Parallel Discrete-event Simulation, Distributed Simulation, Python.
Abstract:
This paper describes SimX, a recently developed library for developing parallel, discrete-event simulations
in Python. Written in C++ and Python, SimX enables rapid development and prototyping of a parallel sim-
ulation entirely in Python by providing the simulation modeler with core functionality such as processes,
event queuing, time advancement, domain partitioning, synchronization and message passing. Designed for
both ease-of-use and scalability, applications built using SimX can be executed on multi-core workstations or
high performance clusters and can also be easily integrated with other Python tools for scientific computing.
In this paper, we briefly discuss the motivation for developing SimX, provide a brief but illustrative exam-
ple on using SimX to develop an application, a short description of its architecture and some of our initial
experiences using SimX in a diverse array of domains. SimX is free software and is publicly available at
http://github.com/sim-x under the GNU LGPL license.
1 INTRODUCTION
SimX is a generic library for developing parallel, dis-
crete event simulations in Python, designed for both
scalability and ease of use. Simulations are the only
feasible approach to studying large-scale, complex
interacting systems – ant colonies, traffic jams, so-
cial and infrastructure networks, to name a few –
where the purely local interactions of numerous en-
tities give rise to emergent behavior, that can neither
be observed at the local level nor be modeled analyti-
cally. For modeling large scale systems, such as cities
and social networks, the scalability of a simulation
framework then becomes critically important. Simu-
lating the behavior of millions of interacting entities
demand significant computational resources, and the
need for a framework to support distributed-memory
parallelism becomes readily apparent.
On the other hand, developing a scalable simula-
tion model that supports parallelism often becomes a
complex undertaking unto itself. The modeler has to
take into account issues such as synchronization, dis-
tributed message passing and object serialization, to
name a few. While libraries for all these tasks read-
ily exist, they often involve steep learning curves and
considerable software engineering expertise. A do-
∗
Los Alamos Unlimited Release LA-UR 12-26739.
main expert, such as a social scientist for example,
who wishes to study the large scale interactions of in-
telligent agents in a social network is faced with the
task of investing considerable time and effort in com-
plex software engineering issues related to parallel
programming, or limiting herself to studying small-
scale models.
SimX has been designed keeping both ease-of-use
and scalability in mind. The core of SimX is writ-
ten in C++, providing it with speed for frequently
used functionality such as event-queueing, time ad-
vancement, domain partitioning and synchronization.
APIs needed to develop a simulation application
are exported to Python using the Boost Python li-
brary (Abrahams and Grosse-Kuntsleve, 2003); these
and additional Python wrappers in SimX enable ap-
plication developers to program entirely in Python.
Message passing uses the object serialization facility
already present in Python via the fast cPickles (cPick-
les, 2006) serialization library. Thus any arbitrary
Python object that can be serialized (or pickled, as
it known in Python parlance) can be sent and re-
ceived between simulation processes. SimX also sup-
ports process oriented simulation, with the facility
of suspending an executing simulated process and
re-entering at the point of suspension. This is im-
plemented using light-weight micro-threads (called
188
Thulasidasan S., Kroc L. and Eidenbenz S..
Developing Parallel, Discrete Event Simulations in Python - First Results and User Experiences with the SimX Library.
DOI: 10.5220/0005042701880194
In Proceedings of the 4th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2014),
pages 188-194
ISBN: 978-989-758-038-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

greenlets (Schmitt, 2012)) that can be used to simu-
late a large number of concurrent processes with very
little overhead. A process oriented paradigm can of-
ten greatly simplify the implementation of simulation
models, especially those used for computer systems
modeling.
The main goal in developing SimX was to enable
domain researchers to rapidly develop simulation ap-
plications and deploy it on clusters without having to
get bogged down by the intricacies of parallel pro-
gramming, managing MPI communication or worry
about issues such as load balancing. In recent years,
Python has emerged as a popular and attractive choice
for domain scientists due to its ease of use, flexibility
and expressive power. This made it a natural choice
as a front-end for SimX. A thriving and substantial
ecosystem for scientific computing in Python already
exists and an application developed in SimX can be
easily integrated with other modules available for sci-
entific computing in Python. SimX has been written
as a tool for research where developer cycles, are in
general, more valuable than program execution time.
Indeed, our initial experiences with SimX have shown
that the code base of a Python simulation application
is often smaller than its C++ counterpart by a factor of
four or more. While the flexibility of Python comes
with a performance cost, the implementation of the
core functionality in C++ provides a reasonable trade-
off between ease-of-use and performance. For situ-
ations where performance is an over-riding concern,
computationally intensive parts of the program can be
re-written in pure C++. In fact the entire simulation
application itself can be written in C++ as SimX al-
lows for applications to be pure Python, a Python/C++
hybrid or even pure C++.
In the following sections we discuss related work
and differences between our approach and others. We
then provide a brief architectural overview of SimX,
which includes a simple example illustrating some of
the features of SimX. We also provide some initial ex-
periences with SimX in terms of the program size of
Python simulations compared to equivalent C++ pro-
grams, and some initial scaling results.
2 RELATED WORK
The hybrid programming-language approach to simu-
lation is not new, the most notable example of this be-
ing the NS-2 network simulator (NS-2, ), which uses
a C++ backend with a TCL front end, it’s parallel and
distributed version called PDNS (PDNS, ) and more
recently NS-3 (NS-3, ) which uses C++ and Python
for parallel network simulation. SimX, however, is a
general purpose library, and not tied to any one do-
main; it can be used to develop applications in any
context where discrete-event simulation is an appro-
priate modeling paradigm.
There are a number of general purpose libraries
available for developing discrete-event simulations.
RePast (North et al., 2006) is a collection of open-
sourced modules for parallel agent based simulations
in C++ and Java. SASSY (Hybinette et al., 2006)
is a scalable agent simulation system for PDES that
provides a middleware between an agent-based API
and a PDES simulation kernel. MASON (Luke et al.,
2005) is a discrete-event multi-agent simulation li-
brary core in Java, designed to be the foundation for
large custom-purpose Java simulation. Another Java-
based simulation system is JiST (Barr et al., 2005),
that uses a virtual-machine based simulation approach
by embedding simulation semantics directly into the
Java execution model. PrimeSSF (PRIME, ), origi-
nally known as DaSSF, is a parallel simulation frame-
work, developed originally for network simulation,
that supports both distributed and shared-memory im-
plementations.
OMNET++ (OMNET++, 1996) is a component-
based C++ simulation library and framework, pri-
marily focussed on the domain of network simula-
tion. OMNET++ also supports parallel simulations.
ClusterSim (Ramos and Martins, 2004) is a Java-
based parallel discrete-event simulation tool for clus-
ter computing. ClusterSim supports visual model-
ing and simulation of clusters and their workloads
for performance analysis. µsik (Perumalla, 2005) is
a micro-kernel for PDES that supports both conser-
vative and optimistic parallel simulations. A more re-
cent effort is the ROme OpTimistic Simulator (ROOT-
Sim) (Pellegrini et al., 2011), an open source C/MPI-
based simulation package targeted at POSIX systems,
which implements a general purpose PDES environ-
ment with optimistic synchronization; the simulation
models, however, need to be implemented in C.
On the Python side, SimPy (SimPy, ) is an object-
oriented, process-based discrete-event simulation lan-
guage written in pure Python and provides the mod-
eler with classes for both active and passive compo-
nents in a simulation. Parallel support was later added
to SimPy, but the parallelism remains non-transparent
to the user. In the hybrid-approach category, PC-
Sim (Pecevski et al., 2009) is a C++ based neural net-
work simulator with a python front-end, that supports
both sequential and distributed memory simulations.
Thus while numerous libraries exist for parallel
discrete-event simulations for languages in languages
such as C, C++ and Java, and while packages also
exist for developing sequential discrete-event appli-
DevelopingParallel,DiscreteEventSimulationsinPython-FirstResultsandUserExperienceswiththeSimXLibrary
189
cations in Python, to the best of our knowledge SimX
is the first publicly available general purpose library
for developing parallel discrete-event simulations in
Python.
3 A QUICK INTRODUCTION TO
USING SimX
SimX itself is a successor to the SimCore library de-
scrbed in (Thulasidasan et al., 2012), which was pri-
marily a C++ library with a thin Python front-end. In
SimX, the architecture is more tightly integrated with
Python, with SimX now being a module that can be
imported from within Python. SimX is currently dis-
tributed in source format, and like many other open-
source packages, requires to be compiled and built by
the user via an automated build process.
The software prerequisites for building and us-
ing SimX are a Python interpreter, a C++ com-
piler, the Boost libraries (Boost, ) and MPI. The
source along with build and installation instructions
are available at github.com/sim-x or can be down-
loaded and installed via the Python package reposi-
tory at https://pypi.python.org/pypi/simx
The main objects in a SimX simulation applica-
tion are Entities, Processes and Services. Entities rep-
resent physical objects ( e.g. an agent) while services
(which live on entities) represent the behavior of an
agent. Processes represent simulated threads that ex-
ecute concurrently
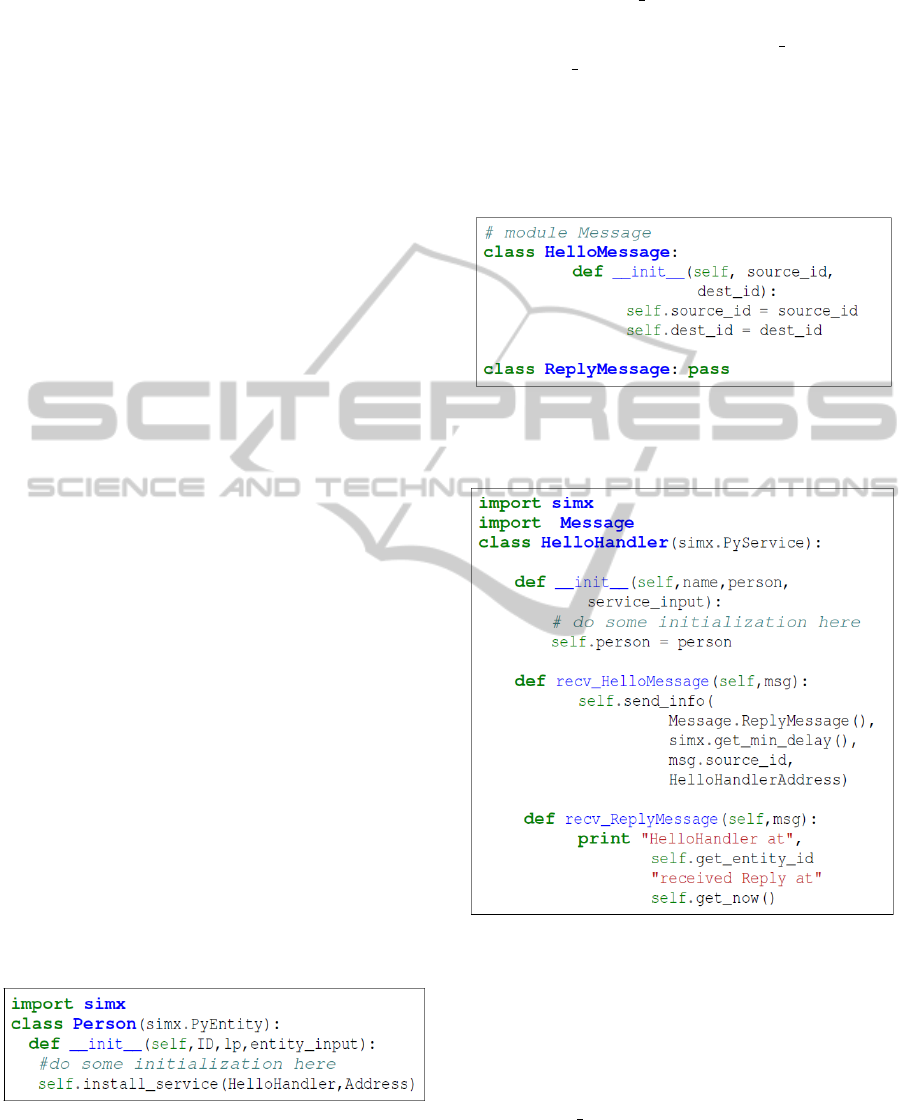
Let us consider a simple HelloWorld example
that consists of a Person entity and a HelloHandler
service attached to a Person object. In our simple set
up, when a HelloHandler residing on a Person en-
tity receives a Hello message, it sends a Reply mes-
sage to the sending Person, to be delivered at some
specified time.
Even though this example is highly simplified, it
illustrates some of the key ideas for building a SimX
application. The Python definition for the Person
entity is: Each entity in a SimX application inherits
from the PyEntity class exported from SimX. At the
time of creation an entity is informed of its identity,
the id of the simulation process on which it lives and
any input parameters if required. The current simu-
lation time is always available to entities (as well as
services) via the get now() method. Information re-
garding which services are to be created on the entity
is passed to the entity via the entity input object.
The create services method is used to explicitly
create services on an entity.While some initializations
have been omitted here, the code above captures the
essence of the Python class definition. Let us also de-
fine the two message objects, Hello and Reply which
are quite simply: Next consider the HelloHandler
service that lives on a Person. The Python class def-
inition is: Each service object in a SimX applica-
tion inherits from the PyService class exported from
SimX. At creation time, a service is informed of its
identity, the entity on which it lives and any input pa-
rameters that have been passed in. Since a service and
its entity always lives in the same memory space, all
the entity functions and data members are available to
a service object.
The send info() method referenced above is the
communication work-horse of SimX and follows the
simple (what, when, who, where) paradigm. The
parameters to it are the object to be sent, the sending
time (offset from current time), the entity to send it to,
and the service address on the entity that will receive
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
190

the message. Any Python object that can be serialized
(via the cPickles Python module (cPickles, 2006))
can be sent and received inside through SimX.
In addition to sending, services are also capable
of receiving messages. If a service needs to receive
more than one type of message, as in the above ex-
ample, the Pythonic way to determine which receive
function gets called would be to define a Python dic-
tionary that hashes object types to receive functions,
as in: All Python services are expected to define a
recv function, which gets called each time a mes-
sage is received at a service. Using the dictionary
as defined above, it then becomes quite straightfor-
ward to determine which of the two receive handlers
defined above gets invoked. To actually run the sim-
ulation, one simply writes a Python script that cre-
ates the desired simulation scenario. Snippets from
the HelloWorld example are shown below: The mes-
sage generation process in the code snippet above is
an example of a simulated process in SimX. When the
process goes to sleep, other simulation processes exe-
cute in the background, advancing time as required.
When the process wakes up, it resumes execution
at the suspended point. This mechanism is imple-
mented using pseudo-threads in Python called green-
lets (Schmitt, 2012) which are essentially extremely
light-weight co-routines whose scheduling is explic-
itly specified by the SimX process scheduling mech-
anism. Greenlets incur very little context switching
overhead; together, with the message passing mecha-
nism of SimX, these are used to implement function-
ality for process oriented simulation.
Notice that in the above example, entities did not
have to be explicitly assigned to processors; by de-
fault SimX deals with this by scattering the entities in
a round-robin manner, which, in some cases can out-
perform more sophisiticated algorithms (see (Thulasi-
dasan et al., 2010)). The user, of course, can always
explicitly partition the domain based on the charac-
teristics of the problem. Services are always assigned
to the same memory space as the entities to which
they are attached. The parallelism in a SimX simula-
tion is almost transparent to the user in the sense that
the same simulation code can be used for a sequen-
tial simulation or a parallel one. The only parameter
that needs to be specified is the number of parallel
processes to instantiate, which defaults to the number
of running MPI processes. For a more involved im-
plementation of the HelloWorld example, the reader
is referred to the examples/HelloWorld directory in
the SimX source distribution.
4 SimX INTERNALS
We present a quick overview of the architecture of
SimX in this section; a thorough treatment of SimX
internals will be presented in the user manual that the
authors are currently working on.
There are four major SimX constructs that form
the basis of a simulation application. These are:
• Entity. This is the primary active element of the
simulation (an agent, a network device etc.); an
entity has associated properties and behaviors that
are implemented using services
DevelopingParallel,DiscreteEventSimulationsinPython-FirstResultsandUserExperienceswiththeSimXLibrary
191

• Service. A service on an entity determines the
behavior of entities, i.e responses to events.
• Message. These are the events in the simula-
tion which include timer events, control events
and messages passed between entities in the sim-
ulation. Messages are passed and received be-
tween services living on entities. If the entities
live in different memory spaces, SimX serializes
and packs the data, A reception of a message at a
service triggers the handling routine for that par-
ticular type of message.
The above three classes are defined in the C++ core.
In addition we also have the following class defined
in the Python space:
• Process. These are Python objects that pro-
vide functionality for process oriented simula-
tion. Implemented via Greenlets (Schmitt, 2012),
which are extremely light-weight pseudo-threads
in Python, processes can suspend execution via
sleeping, or waiting on another process (or re-
source), and then resume execution at the point
of suspension.
In Python space, arbitrary objects can be packed
and sent to other processes via encapsulation inside
a C++ Imessage object. SimX also includes its own
multi-threaded simulation engine built on top of the
MPI library that provides a conservative barrier-based
synchronization and message passing functionality to
the application. However, this simulation engine can
easily be swapped out with another engine using a
simple compile time switch; for example, as an al-
ternative to the native simulation engine, SimX also
works with miniSSF (Liu, ), a light-weight version of
PrimeSSF with conservative synchronization.
2
The
modular nature of SimX allows one to plug-in any
PDES synchronization and message-passing engine
(including those that use optimistic synchronization
schemes) with very few changes to the C++ core.
The SimX APIs are exported to Python using
the Boost Python library (Abrahams and Grosse-
Kuntsleve, 2003) library which provides seamless op-
erability between C++ and Python. Boost.Python
provides comprehensive mapping between C++ and
Python constructs, and supports advance templated
meta-programming techniques. There is support for
exception handling, iterators, operator over-loading,
STL containers, smart pointers and virtual functions
that can be over-ridden in Python. This feature
makes the interface bidirectional i.e user-extensions
in Python can be also invoked from C++. A graphical
schema of the architecture is illustrated in Figure 1
2
The current version of SimX is distributed with
miniSSF.
Figure 1: SimX architecture overview.
5 SimX: INITIAL EXPERIENCES
AND PERFORMANCE
RESULTS
SimX has been written as a tool for research where de-
veloper cycles, are in general, more valuable than pro-
gram execution time. The choice of Python as a front-
end for developing simulation applications was moti-
vated by the low learning barrier and flexibility of the
language, in addition to its well deserved reputation
for rapid prototyping and ease of application develop-
ment. The flexibility of Python is largely an outcome
of its dynamically typed nature, which does result in
applications running slower than a pure C++ imple-
mentation. In this section we briefly present some
initial experiences in porting pure C++ simulation ap-
plications to Python using SimX. As a loose metric of
programmer productivity, we report on the number of
lines of code in the C++ application and compare it to
its Python counterpart. We also present initial scaling
studies using a simple HelloWorld type of applica-
tion that was discussed in Section 3.
For our initial test-cases, the following applica-
tions were ported to Python
• HelloWorld. This is a simple sending-receiving
application, similar to the application described in
Section 3.
• EduSim. An agent-based simulator for modeling
performance of students in school systems. The
agents in the simulation are students, teachers and
the school system, while the services model the
various types of behavior of these agents that are
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
192
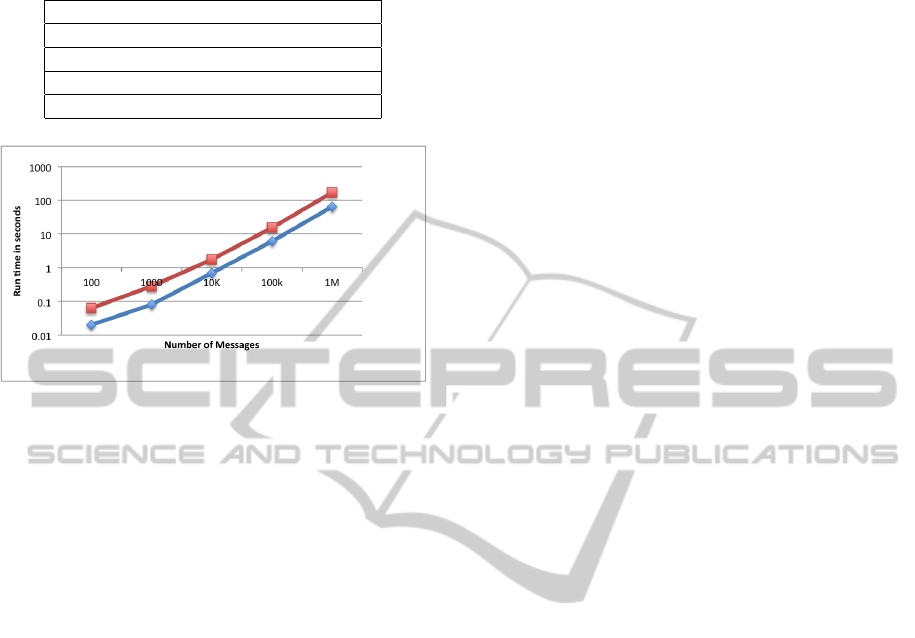
Table 1: Comparison of number of lines of code between
equivalent C++ and Python simulation applications.
C++ Python Ratio
HelloWorld 386 107 3.6
EduSim 3057 901 3.4
AgentCore 1936 561 3.45
TADSim 4057 799 5
Figure 2: Run time comparison between C++ (Blue) and
Python (Red) implementations of HelloWorld.
thought to significantly influence the performance
of a school system
• AgentCore. (Galli et al., 2009), a reactive agent
model library that was developed at Los Alamos
National Laboratory for developing agent-based
simulations.
• TADSim. A simulation of the execution of a
molecular dynamics simulation program (i.e. a
simulation of a simulation) that was developed at
Los Alamos as part of an effort to better under-
stand and optimize the execution of parallel pro-
grams on high performance computing clusters.
Each of the above applications (with the exception of
HelloWorld) consisted between 2000 and 4000 lines
of code, and were developed over a course of many
weeks, often months. While porting, one obviously
has the advantage that a redesign of program archi-
tecture isn’t required during a porting exercise. Nev-
ertheless, it is instructive to see the difference in the
amount of lines of code while moving from C++ to
Python, shown in the table below.
From the table we see that an equivalent Python
program reduces the code base size by upto a factor
of 4x compared to the C++ counterpart. The Python
porting was often completed in a few hours, and most
of this saving comes from the dynamically typed na-
ture of Python whereby type declaration statements
are completely absent. Also, in the C++ versions of
the simulator, objects have to be explicitly serialized,
whereas in Python, it simply involves an invocation to
the pickling module.
Figure 2 shows the run-time of a pure C++ imple-
mentation of HelloWorld in comparison to its Python
counterpart, for increasing number of messages, rang-
ing from 100 to upto a million messages in the simu-
lation. This is a simplistic example, completely dom-
inated by message passing, but interestingly enough,
the speed-ratio of about two holds constant even as
the number of messages are increased. One would
expect more computationally intensive scenarios that
are able to leverage the highly tuned python libraries
for numerical computation to decrease the Python-
C++ performance gap.
6 ONGOING AND FUTURE
WORK
SimX is, to the best of our knowledge, the first pub-
licly available general purpose library for developing
parallel discrete-event simulations in Python. It is
currently under active development; new features and
bug-fixes are regularly updated on the project code
site at github.com/sim-x. At Los Alamos, SimX
is currently being used to model a variety of com-
plex systems using PDES, such as the performance
of computational physics codes running on supercom-
puters, both from a software and hardware perspec-
tive, and modeling of a modern financial reserve sys-
tem (Williams and Eidenbenz, 2013). We invite sim-
ulation researchers and domain scientists to try SimX
for their research and provide valuable early feedback
to the developers. We also encourage interested sim-
ulation developers to participate in further develop-
ments to SimX.
REFERENCES
Abrahams, D. and Grosse-Kuntsleve, R. (2003).
Building hybrid systems with boost.python.
http://www.boostpro.com/writing/bpl.html.
Barr, R., Haas, Z. J., and van Renesse, R. (2005). Jist: an ef-
ficient approach to simulation using virtual machines:
Research articles. Softw. Pract. Exper., 35(6):539–
576.
Boost. Boost c++ libraries. http://www.boost.org.
cPickles (2006). http://docs.python.org/2/library/pickle.html.
Galli, E., Eidenbenz, S., Mniszewski, S., Teuscher, C., and
Cuellar, L. (2009). Activitysim: Large-scale agent-
based activity generation for infrastructure simulation.
In Proceedings of the 2009 Spring Simulation Confer-
ence.
Hybinette, M., Kraemer, E., Xiong, Y., Matthews, G., and
Ahmed, J. (2006). Sassy: a design for a scalable
DevelopingParallel,DiscreteEventSimulationsinPython-FirstResultsandUserExperienceswiththeSimXLibrary
193

agent-based simulation system using a distributed dis-
crete event infrastructure. In Perrone, L. F., Lawson,
B., Liu, J., and Wieland, F. P., editors, Winter Simula-
tion Conference, pages 926–933. WSC.
Liu, J. Minimalistic Scalable Simulation Framework. Avail-
able at https://www.primessf.net/minissf/.
Luke, S., Cioffi-Revilla, C., Panait, L., Sullivan, K., and
Balan, G. (2005). Mason: A multiagent simulation
environment. Simulation, 81(7):517–527.
North, M. J., Collier, N. T., and Vos, J. R. (2006). Expe-
riences creating three implementations of the repast
agent modeling toolkit. ACM Trans. Model. Comput.
Simul., 16(1):1–25.
NS-2. http://www.isi.edu/nsnam.
NS-3. http://www.nsnam.org.
OMNET++ (1996). http://www.omnetpp.org.
PDNS. Parallel/distributed ns. http://www.cc.gatech.edu/
computing/compass/pdns/.
Pecevski, D., Natschlager, T., and Schuch, K. (2009). Pc-
sim: a parallel simulation environment for neural cir-
cuits fully integrated with python. Frontiers in Neu-
roinformatics, 3(0).
Pellegrini, A., Vitali, R., and Quaglia, F. (2011). The
rome optimistic simulator: Core internals and pro-
gramming model. In Proceedings of the 4th Interna-
tional ICST Conference on Simulation Tools and Tech-
niques, SIMUTools ’11, pages 96–98, ICST, Brus-
sels, Belgium, Belgium. ICST (Institute for Com-
puter Sciences, Social-Informatics and Telecommuni-
cations Engineering).
Perumalla, K. (2005). µsik - a micro-kernel for paral-
lel/distributed simulation systems. In Workshop on
Principles of Advanced and Distributed Simulation.
PRIME. Parallel Real-time Immersive network Modeling
Environment. Available at http://prime.mines.edu/.
Ramos and Martins (2004). Clustersim: a Java-based par-
allel discrete-event simulation tool for cluster comput-
ing. In Proceedings of IEEE International Conference
on Cluster Computing.
Schmitt, R. (2012). http://greenlet.readthedocs.org.
SimPy. http://simpy.sourceforge.net.
Thulasidasan, S., Kasiviswanathan, S., Eidenbenz, S., and
Romero, P. (2010). Explicit spatial scattering for load
balancing in conservatively synchronized parallel dis-
crete event simulations. In Proceedings of ACM/IEEE
Workshop on Principles of Advanced and Distributed
Simulation (PADS).
Thulasidasan, S., Kroc, L., and Eidenbenz, S. (2012). Sim-
core: A library for rapid development of large scale
parallel simulations. In SIMULTECH, pages 71–76.
Williams, S. and Eidenbenz, S. (2013). Themis-1: An
agent-based model of a modern monetary reserve sys-
tem. In Proceedings of the Agent-Directed Simulation
Symposium, ADSS 13, pages 6:1–6:8, San Diego, CA,
USA. Society for Computer Simulation International.
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
194
