
Optimization Strategies for Tuning the Parameters of Radial Basis
Functions Network Models
Gancho Vachkov
1
, Nikolinka Christova
2
and Magdalena Valova
2
1
School of Engineering and Physics, The University of the South Pacific (USP), Laucala Campus, Suva, Fiji
2
Department of automation of Industry, University of Chemical Technology and Metallurgy, Sofia, Bulgaria
Keywords: Radial Basis Function Networks, RBF Models, Parameter Tuning, Optimization Strategies, Particle Swarm
Optimization, Supervised Learning.
Abstract: In this paper the problem of tuning the parameters of the RBF networks by using optimization methods is
investigated. Two modifications of the classical RBFN, called Reduced and Simplified RBFN are
introduced and analysed in the paper. They have a smaller number of parameters. Three optimization
strategies that perform one or two steps for tuning the parameters of the RBFN models are explained and
investigated in the paper. They use the particle swarm optimization algorithm with constraints. The one-step
Strategy 3 is a simultaneous optimization of all three groups of parameters, namely the Centers, Widths and
the Weights of the RBFN. This strategy is used in the paper for performance evaluation of the Reduced and
Simplified RBFN models. A test 2-dimensional example with high nonlinearity is used to create different
RBFN models with different number of RBFs. It is shown that the Simplified RBFN models can achieve
almost the same modelling accuracy as the Reduced RBFN models. This makes the Simplified RBFN
models a preferable choice as a structure of the RBFN model.
1 INTRODUCTION
Radial Basis Function (RBF) Networks have been
widely used for a long time as a power tool in
modeling and simulation, because they are proven to
be universal approximators of nonlinear input-output
relationships with any complexity (Poggio, Girosi,
1990; Park, Sandberg, 1993). In fact, the RBF
Network (RBFN) is a composite multi-input, single
output model, consisting of a predetermined number
of N RBFs, each of them performing the role of a
local model (Pedrycz, Park, Oh, 2008). Then the
aggregation of all the local models in the form of a
weighted sum of their output produces the nonlinear
output of the RBFN.
There are some important features that make the
RBF networks diferent from the classical feed
forward networks, such as the well known
multilayer perceptron (MLP), often called back-
propagation neural network (Poggio, Girosi, 1990);
Zhang, Zhang, Lok, Lyu, 2007). The biggest difference
is that the RBFN are heterogeneous in parameters.
In fact they have three different groups of
parameters, which normally require the use of
different learning algorithms. This makes the total
learning process of the RBFN more complex,
because it is usually done as a sequence of several
learning steps. This obviously affects the accuracy
of the produced model.
In this paper we investigate in details the internal
structure of the RBFN and propose two
modifications of the classical RBFN, called Reduced
and Simplified RBFN. They have smaller number of
tuning parameters, which makes the learning faster.
As an universal optimization procedure for tuning all
three groups of parameters we use in the paper a
modified version of the classical Particle Swarm
Optimization (PSO) (Eberhart, Kennedy, 1995) with
specific constraints for each group of parameters.
This constrained version produces more plasusible
solutions of parameters with real physical meaning.
The rest of the paper is organized as follows.
Section 2 summarizes the basics of the classical
RBFN model and Section 3 introduces the Reduced
and Simplified RBFN wilth smaller number of
parameters. Section 4 expalinjs three different
optimization strategies for creating RBFN models
that use a modification of the PSO algorithm with
constraints. In Section 5 one-stap optimization
strategy is used for tuning the parameters of the
443
Vachkov G., Christova N. and Valova M..
Optimization Strategies for Tuning the Parameters of Radial Basis Functions Network Models.
DOI: 10.5220/0005051104430450
In Proceedings of the 4th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2014),
pages 443-450
ISBN: 978-989-758-038-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
Reduced and Simplified RBFN models. Finally,
Section 6 concludes the paper.
2 THE CLASSICAL RBF
NETWORK MODEL
Our aim is to create a model of a real process
(system) with K inputs and one output by using a
collection of M available experiments (input-output
pairs) in the form:
11
{( , ),...,( , ),...,( , )}
ii M M
yy yXXX
(1)
Here
12
[, ,..., ]
K
x
xxX
is the vector of all K inputs
and
y
is the respective measured output from the
process.
The modelled output, calculated by the RBF
network is as follows:
(,)
m
yf XP
(2)
Here
12
[ , ,..., ]
L
p
ppP is the vector of all L
parameters included in the RBFN.
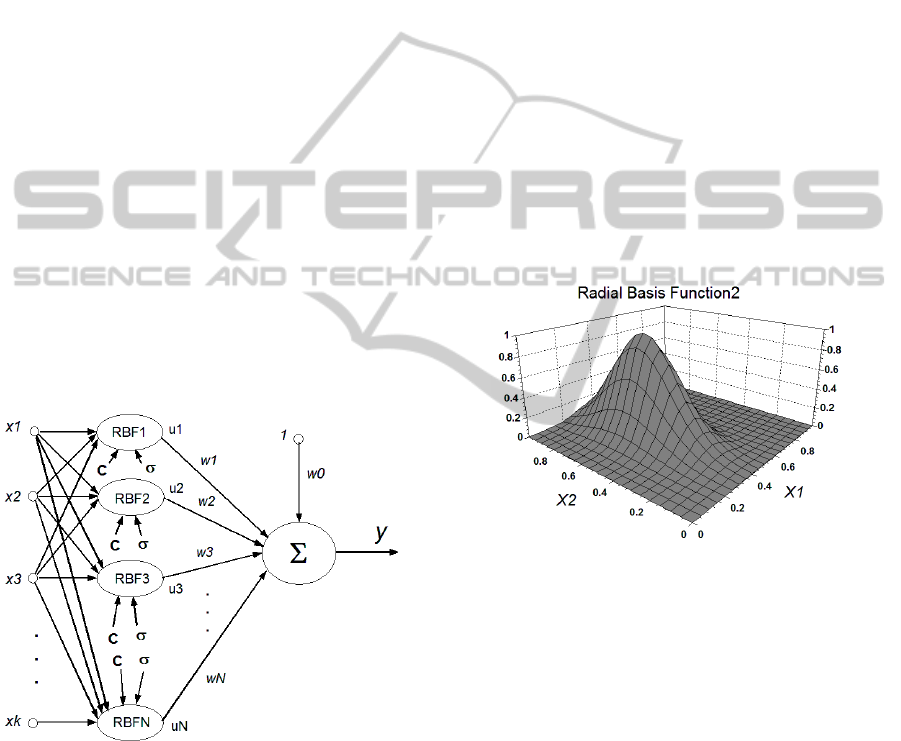
The classical RBFN has a three layer structure,
namely input layer, hidden layer and output layer as
shown in Fig. 1.
Figure 1: Structure of the Classical Radial Basis Function
Network with K inputs and N RBFs.
Then the modelled output from the RBFN with fixed
number of N Radial Basis Functions will be:
0
1
N
mii
i
y
wwu
(3)
Here
, 1, 2,...,
i
ui N
are the outputs of each RBF
based on its K inputs
and
, 0,1, 2,...,
i
wi N
are the weights associated with
the RBFs, including the offset weight
0
w as seen in
the figure.
Each RBF is determined in the K-dimensional
space by two groups (vectors) of parameters, namely
the center (location)
12
[ , ,..., ]
K
cc c
C
and the
width (spread)
12
[ , ,..., ]
K
σ
. Then the output
u of each RBF is calculated as:
22
1
22
1
exp[ ( ) /(2 )]
exp [( ) /(2 )] [0,1]
K
jj j
j
K
jj j
j
uxc
xc
(4)
Figure 2 shows a 3-dimensional plot of one RBF
calculated by (4) with K=2 inputs and the following
vectors for the center and width in the input space:
[0.4, 0.6]; [0.10,0.20]
C σ
.
Figure 2: Example of a RBF with K=2 Inputs, center
location at [0.4, 0.6] and two different widths: [0.10, 0.20].
It is now clear that all parameters form the following
3 groups in the parameter vector P, namely: Centers,
Widths and Weights, as follows:
12
[, ,..., ]
L
pp pPCσ W
(5)
Then, for a RBFN with K inputs and N RBFs, the
total number L of the parameters to be tuned will be:
(1)2( ) 1LNK NK N N K N
(6)
It is obvious that the number of all L parameters will
rapidly grow with increasing the complexity of the
RBFN model, i.e. the number of RBFs and the
number of inputs. This possesses a challenge to the
selected learning algorithm.
12
, ,...,
K
x
xx
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
444
3 TWO MODIFICATIONS OF
THE RBF NETWORK MODEL
In order to reduce the total number L of parameters
that have to be tuned (optimized), we propose and
use in this paper two modifications of the classical
RBFN model from (3) and (4) shown in Fig. 1.
3.1 The Reduced RBF Network
The reduction of the number of parameters here is
achieved by assuming that the RBF has a scalar
width
instead of a K-dimensional vector width
12
[ , ,..., ]
K
σ as in (4). Then the calculation
of the output for each RBF is performed according
to the Euclidean distance between the input vector X
and the center C of the RBF, as follows:
22
1
exp ( ) (2 ) [0,1]
K
jj
j
uxc
(7)
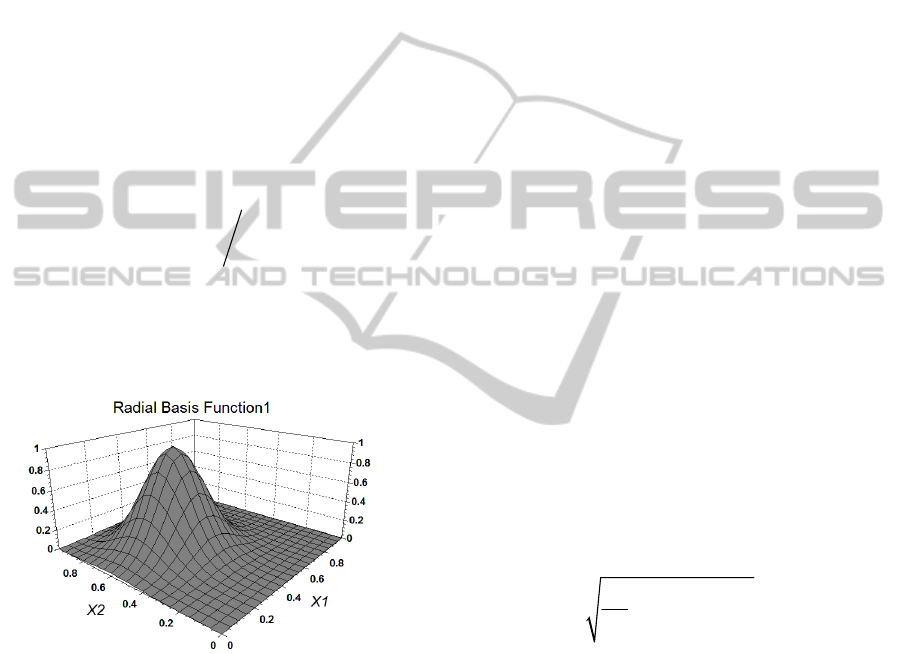
An example of one RBF with a scalar width
0.15
and center
[0.4,0.6]C
is shown in Fig. 3.
It is easy to notice the difference in the shape with
the RBF in Fig. 2.
Figure 3: Example of a RBF with K=2 Inputs, center
location at [0.4, 0.6] and a single width of 0.15.
Now the total number L of the parameters in the
proposed Reduced RBFN is calculated as:
(1) 21LNK N N NK N
(8)
3.2 The Simplified RBF Network
This is a further step in reducing the number L of all
parameters of the RBF network. Here an assumption
of one common width
for all N RBFs is made.
This means that the calculation of each RBF is
performed by the same equation (7), as in the
Reduced RBFN, but with one common width
for
all RBFs. Now the total number L of the parameters
in the proposed Simplified RBFN will be:
1( 1) 2LNK N NK N
(9)
The idea of creating a model by the Simplified RBF
Network is that that all N RBFs will be located (in
general) at different locations (centers) in the K-
dimensional input space, but will have one common
width Sigma. Here it could be expected that a large
number of RBFs will be needed (compared with the
case of Reduced RBFN) in order to achieve the same
or similar model accuracy. However this speculation
needs to be proven experimentally.
4 OPTIMIZATION STRATEGIES
FOR PARAMETER TUNING OF
THE RBF NETWORK MODEL
Further on we assume that the collection (1) of M
input-output pairs of experiments is available and
the structure of the RBFN is fixed prior to the
learning process. This means that the number N of
the RBFs is fixed and the structure of the RBFN
(Classical, Reduced or Simplified) is decided.
The next step is to tune in off-line mode all L
parameters (5) of the RBFN model so that to
minimize a preliminary formulated performance
index. Since this is a typical supervised learning
problem, the objective here is to minimize the total
prediction error (RMSE) by the RBFN model, as
follows:
2
1
1
()min
M
iim
i
RMSE y y
M
(10)
The problem of tuning (training) the parameters of
the RBF network is a typical (off-line or online)
supervised learning problem, which can be solved
by a nonlinear optimization method. This problem
has been investigated by many authors for a long
time by using different algorithms (Musavi, Ahmed,
Chan, Faris, Hummels, 1992
; Yousef, 2005). The
work presented in this paper is considered as our
viewpoint and approach to solving the problem.
As mentioned in Section 2, there are 3 different
groups of parameters in the RBFN model, namely
centers, widths and weights, according to the
notations in (3). The objective of minimizing the
RMSE in (10) can be achieved by use of different
learning and optimization strategies. They are
summarized briefly as follows:
OptimizationStrategiesforTuningtheParametersofRadialBasisFunctionsNetworkModels
445

Strategy 1. This is a two-step strategy. First the
vector P of all parameters from (5) is divided into
two groups: Group1, consisting of the centers C and
widths
and Group2, consisting of the weights W.
Then the first step of the Strategy 1 performs
unsupervised learning algorithm (such as the C-
means clustering algorithm) to find the locations of
the centers in the input space. Then an approximate
estimation of the widths is performed as a post-
processing heuristic procedure. The second step is
an optimization procedure of the Group 3 parameters
- the weights, according to the criterion in (10).
Strategy 2. This is another two step strategy. The
first step performs the same unsupervised clustering
algorithm, as in Strategy 1, but this time for finding
the location of the centers only. Then the second
step performs optimization on the remaining two
groups or parameters: the widths and the weights.
Strategy 3. This is a one-step optimization strategy
that is performed on all three groups of parameters
in (5), namely the centers, widths and weights.
It is expected that the Strategy 3 has the potential
to be the best one, since here all 3 groups of
parameters are being optimized simultaneously.
However the actual practical results will strongly
depend on the quality of the algorithm for
multidimensional optimization, as well as on the
proper definition of the boundaries for all three
groups of parameters.
The sequel of the paper is focused mainly on the
use of Strategy 3 for tuning the parameters of the
Reduced and the Simplified RBFN models and on
the analysis of their performance. The widely
popular Particle Swarm Optimization (PSO) (Poli,
Kennedy, Blackwell, 2007) is used as a basic
optimization algorithm with some modifications for
Strategy 3.
4.1 Basics of the Standard Particle
Swarm Optimization (PSO)
Algorithm.
The PSO belongs to the group of the multi-agent
optimization algorithms. It uses a heuristics that
mimics the behaviour of flocks of flying birds
(particles) in their collective search for a food. The
main concept of this algorithm is that a single bird
has no enough power to find the best solution, but in
cooperation and exchanging information with other
birds in the neighbourhood the swarm is likely to
find the best (global) solution. The swarm consists
of a predetermined number n of particles (birds) that
perform a limited cooperation at each iteration of the
search.
At each iteration the PSO algorithm changes the
velocity (step)
i
v and the position
i
x of the particles
1, 2,...,in
according to the following equations:
1
2
(0, ) ( )
(0, ) ( )
ii ii
gi
iii
vvU px
Upx
xxv
(11)
Here
(0, )
U
is a vector of random numbers
uniformly distributed in the range
[0, ].
At each
iteration one number is randomly generated for each
particle.
is a component-wise multiplication;
i
p is the coordinate (location) of the personal best
success of the i-th particle;
g
p
is the coordinate (location) of the global best
success so far and g is the index of this particle;
is the so called “inertia weight”. The introduction
of this parameter in the main equation (11) is the
most popular modification of the classical PSO
algorithm. In fact the inertia weight parameter
controls the power of the particles during the search.
In order to make a proper ratio and plausible balance
between the two stages: exploration and exploitation
in the search, this coefficient is initially set to a
relatively high value ( 0.9, 1.0 or higher) and then is
gradually decreased by each iteration to another,
lower value (e.g. 0.3). This represents the physical
meaning of birds being gradually exhausted (tired)
during search. Most often a predefined linear
decreasing function is used to change the inertia
weight.
Normally the PSO algorithm stops when a given
criterion, such as maximal fitness or minimal error is
met. Since it cannot be always guaranteed, in the
practical implementations of the PSO additional
safety measure, namely a predetermined number of
iterations is used to terminate the algorithm.
4.2 Modified Version of the PSO
Algorithm with Constraints
It is important to note that the classical version of
the PSO does not include constraints (boundaries) on
the search in the input space. This is because of the
general assumption that birds are free to explore the
whole unlimited space so that eventually they can
find the global optimum. It is clear that the width of
the exploration area and the exploration success of
the birds will depend on their current “power”,
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
446
which is defined by the amount of the velocity (step)
at the current iteration, according to (11).
In almost all practical engineering problems it is
mandatory to impose certain constraints (limits) to
the parameters of the input space
12
[, ,..., ]
K
x
xx
in
order to produce an optimal solution with a clear
physical meaning that can be practically realized.
Therefore we have made here a slight modification
in the original version of the PSO algorithm with
inertia weight in order to consider both constraints
(minimum and maximum) on the input parameters, as
follows:
1min 2min min
[, ,..., ]
K
xx x
1max 2max max
[, ,..., ]
K
xx x
(12)
The idea here is very simple, namely the respective
input parameter from
12
[, ,..., ]
K
x
xx
which has
violated the input space is moved back to its
boundary value from (11), as follows:
min min
()
jj jj
I
Fx x THENx x and
max max
()
jj jj
I
Fx x THENx x
. (13)
In such way, at the next iteration a new velocity
(step) from (11) will be generated that has different
amount and direction in the input space. As a result
the particle is likely to escape from being trapped in
the area beyond the boundary. This of course, could
take sometimes not one, but a few iterations.
The next subsection displays some results from the
performance of the constraint version of the PSO.
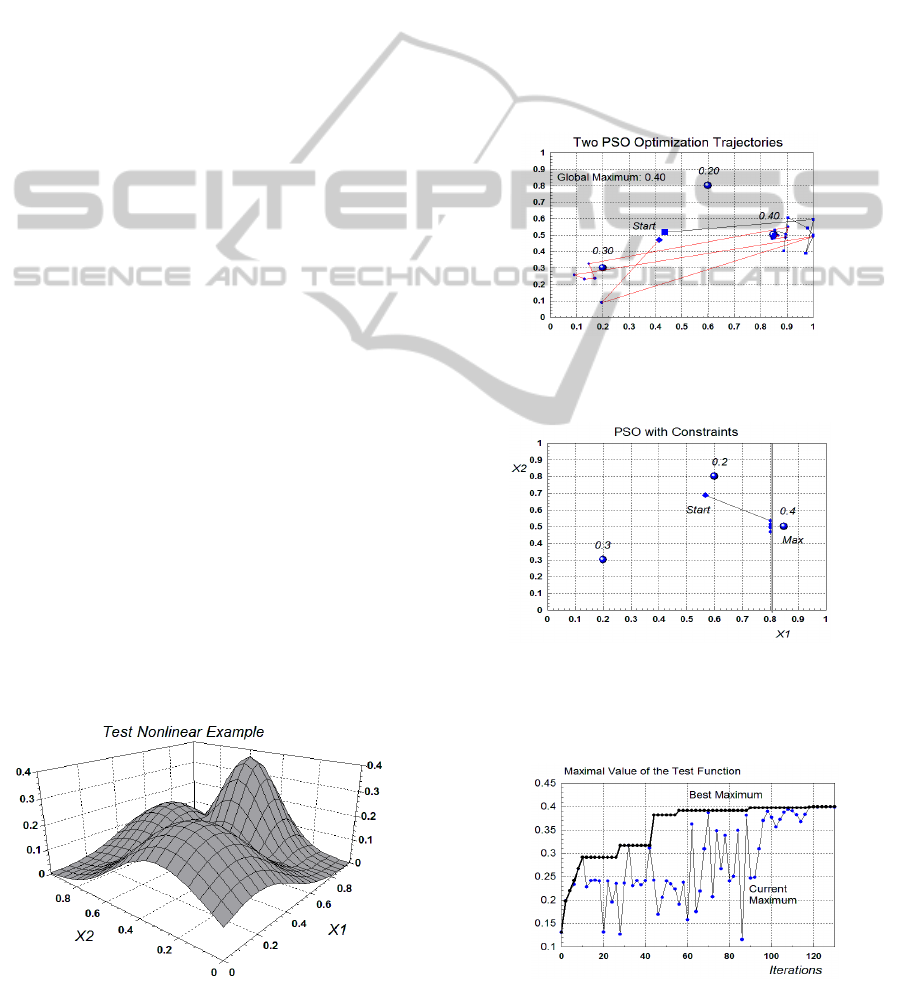
4.3 PSO Performance Evaluation on a
Test Nonlinear Example
A highly nonlinear test example with 2 inputs and
one output is shown in Fig. 4. It was specially
generated in order to evaluate the performance of the
PSO algorithm with constraints.
Figure 4: The test nonlinear example used for performance
evaluation of the PSO algorithm with constraints.
The example is synthetic and constructed by
using 3 RBFs with special overlapping, as seen from
the figure. As a result the response surface (the
output) has 3 maximums (two local and one global)
and the value of the global maximum is 0.4.
The normal range of the input parameters is [0,1]
and the results from two runs of the PSO algorithm
with constraints is shown in Fig. 5. The algorithm
succeeded to find the global maximum of 0.4 after
respective corrections in the trajectories at the
boundary of
1max
1.0x
according to (13).
The next Fig. 6 depicts a case of constrained
optimization, where the PSO algorithm succeeded to
find a conditional maximum at the “wall” of the
constraint.
Figure 5: Two different trajectories, produced by two runs
of the PSO algorithm with constraints at the boundary 1.0
for finding the global maximum of 0.4.
Figure 6: A conditional maximum found by the PSO with
constraints at the boundary 0.8 for the input x1.
The convergence curve for the PSO algorithm, based
on the test example is shown in Fig. 7.
Figure 7: Convergence curve that shows the performance
of the PSO algorithm on the test example.
OptimizationStrategiesforTuningtheParametersofRadialBasisFunctionsNetworkModels
447
5 EXPERIMENTAL RESULTS
FROM OPTIMIZATION OF
REDUCED AND SIMPLIFIED
RBFN MODELS
5.1 The Experimental Setup
The main goal in this section is to compare the
performance of the Reduced RBFN model (Section
3.1) with the Simplified RBFN model (Section 3.2).
As seen from (6), (8) and (9), both models have a
smaller number of parameters, compared with the
parameters in the classical RBFN from Section 2.
The comparison was performed on the same
synthetic test nonlinear example from Fig. 4 that was
used in Section 4 to evaluate the performance of the
PSO algorithm with constraints. The difference is
that now our aim is to create two models, namely
Reduced RBFN and Simplified RBFN of the same
2-dimensional process from Fig. 4 by using a given
set of M input-output experimental data.
For solving this supervised learning problem, we
use the one-step Strategy 3, explained in Section 4
for simultaneous tuning in off-line mode the all 3
groups of parameters. Here the PSO algorithm with
constraints from Section 4.2 was used.
It is seen from (8) and (9) that the Simplified
RBFN model has smaller number of parameters than
the Reduced RBFN model. In fact, if the selected
number of RBFs is N = 8, the Reduced RBFN will
have L=33 parameters, while the Simplified RBFN
will need only L=26 parameters for tuning.
We would like to see whether the Simplified
RBFN is able to produce a model with a similar
(without significant deterioration) performance to
that one of the Reduced RBFN model. A positive
answer to this question would be beneficial for the
Simplified RBFN models.
We use in this paper a set of M=441 uniformly
distributed experimental data in the two-dimensional
space [X1, X2] produced by scanning.
Due to the random nature of the PSO algorithm,
it cannot be expected that one single run will
necessarily produce the absolute global optimum.
Therefore we have performed several (six in this
paper) runs of the algorithm for the same pre-
selected number N of RBFs. At each run the
parameters of the PSO algorithm were slightly
varied. Then the mean value of the RMSE in (10)
from all six runs was assumed as a final
representative value of the error for this number N.
All the experiments were performed separately
for the Reduced and Simplified RBFN with the
following numbers of RBFs: N = 3,4,5,6 and 8. The
constraints imposed to each of the 3 groups of
parameters in (5) were as follows:
- The group of Centers:
min max
0, 1cc
;
- The group of Widths:
min max
0.02, 0.7
;
- The group of Weights:
min max
1, 1ww
.
The tuning parameters of the PSO algorithm with
constraints were varied during the multiple runs in
following ranges:
- Number of particles:
15 40n
;
- Number of iterations:
12000 15000
MAX
IT
;
- Acceleration Coefficients:
12
,[1.8,2.1]
;
- Inertia Weight parameter
: linearly decreasing
from initial values
[0.9,1.2]
at the first
iteration, to
[0.3,0.4]
at the last iteration.
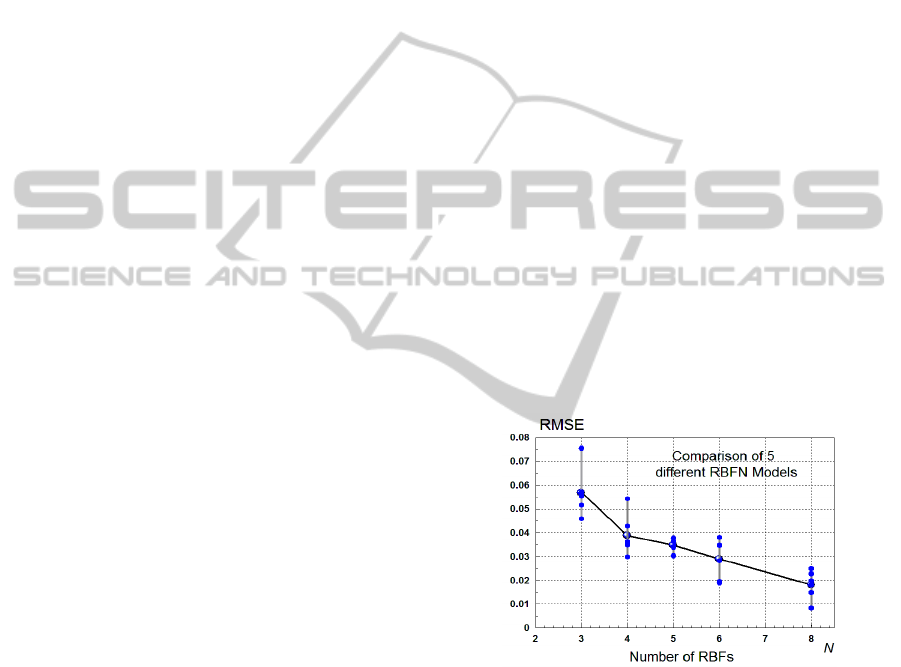
5.2 Experiments with the Reduced
RBFN Model
The main results from these experiments are
displayed in a graphical way in Fig. 8. It is seen
from the figure that the accuracy of the models is
steadily improved with increasing the number of the
RBFs, which is a logical and understandable.
Figure 8: Experimental results obtained from Reduced
RBFN models with different number of RBFs.
For one intermediate RBFN model with N=4 and
respective RMSE=0.0428 the response surface (the
outputs of the model) is shown in Fig. 9. A visual
comparison of the shape of this surface with the
surface for the original process in Fig. 4 reveals
relatively large difference, i.e. the model is not yet
suitable for a good prediction.
The best obtained model is with N=8 RBFs and
has RMSE = 0.00826. Its response surface is
displayed in Fig. 10. It is easy to notice that this
surface practically coincides in shape with the
surface produced by the original process from Fig. 4.
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
448

Figure 9: Response surface from the intermediate Reduced
RBFN model with N = 4 RBFs and RMSE = 0.0428.
Figure 10: Response surface from the best Reduced RBFN
model with N = 8 RBFs and RMSE = 0.0083.
The values of all parameters (Centers, Widths and
Weights) for the best model from Fig. 10, are
displayed in Fig. 11 and Fig. 12.
Figure 11: The values of the Widths and Weights for the
best Reduced RBFN model with N=8 RBFs.
Figure 12: Locations of all 8 Centers of the best produced
Type2 RBFN model with N=8 and RMSE = 0.0083.
From Fig. 12 it is seen that some of the centers
are placed at the boundaries of the input space and
some others have insignificant widths (closer to
zero). This shows that there is a redundancy in the
number of the parameters or in the number of the
RBFs.
The convergence curve for the best Reduced
RBFN model is shown in Fig. 15.
Figure 13: Convergence curve for the PSO algorithm with
constraints in the case of the best model with N=8 RBFs.
5.3 Experiments with the Simplified
RBFN Model
The same structure of the experiments for the
Reduced RBFN was used for producing the results
for the Simplified RBFN models. The results with
the respective RMSE of all the Simplified RBFN
models are shown in Fig. 14 and the parameters of
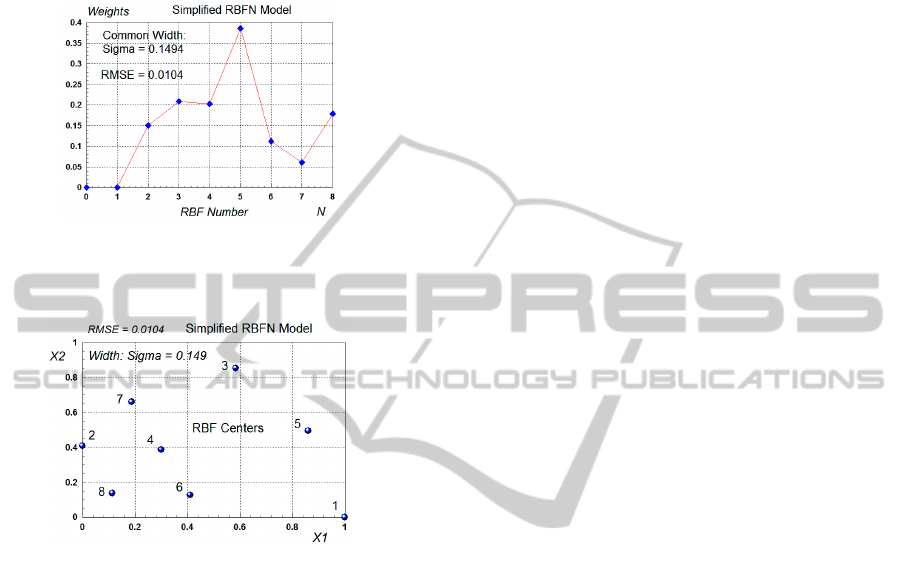
the best model with N=8 and RMSE=0.0104 are
shown in Fig. 15 and Fig. 16. Note that the
Simplified RBFN model has one common width
Sigma for all RBFs, with an optimal value of
0.1494.
Figure 14: Experimental results obtained from the
Simplified RBFN models with different number of RBFs.
The trend in Fig. 14 of a gradual decrease of the
RMSE with increasing the number of the RBFs is
similar to the trend shown in Fig. 8 for the Reduced
RBFN models. Also, a comparison of the values for
the mean RMSE in both figures reveals that there are
OptimizationStrategiesforTuningtheParametersofRadialBasisFunctionsNetworkModels
449
similar. Therefore a conclusion could be made that
the Simplified RBFN model is able to achieve
almost the same accuracy as the Reduced RBFN
model, but with smaller number of parameters,
namely L=26 versus L=33.
Figure 15: The values of the Weights for the best
Simplified RBFN model with N=8 RBFs and one common
Width.
Figure 16: Locations of all 8 Centers of the best
Simplified RBFN model with N=8 and RMSE = 0.0104.
It is seen from Fig. 15 and Fig. 16 that RBF1 (shown
as Center 1 in Fig. 16) is inactive, because its weight
is zero (as seen from Fig. 15). This is another case of
redundancy in the parameters (or in the number of
RBFs) of the model.
6 CONCLUSIONS
The investigations in this paper were focused on the
performance analysis of the RBFN models with two
slightly different structures, namely the Reduced
RBFN and Simplified RBFN models.
One of the three optimization strategies
explained in this paper is the one-step Strategy3,
which optimizes simultaneously all three groups of
parameters, namely the Centers of the RBFs, their
Widths and the Weights. A modified version of the
PSO algorithm with constraints was used for tuning
the parameters of both Reduced and Simplified
RBFN models on a test nonlinear example with
different number of the RBFs.
The Simplified RBFN model has the smallest
number of parameters, because it uses one common
width for all RBFs, unlike the Reduced RBFN
model that uses different widths for the RBFs.
The simulation results have shown that despite
the smaller number of parameters, the Simplified
RBFN models are able to achieve almost the same
accuracy, as the Reduced RBFN models. Therefore
the Simplified RBFN could be the preferable choice
for creating RBFN models.
The further research is focused on solving
another optimization problem such as the optimal
selection of the RBF units used in creating the
RBFN models.
ACKNOWLEDGEMENTS
This paper has been produced with the financial
assistance of the European Social Fund, project
number BG051PO001-3.3.06-0014. The authors are
responsible for the content of this material, which
under no circumstances can be considered as an
official position of the European Union and of the
Ministry of Education and Science of Bulgaria.
REFERENCES
Poggio, T., Girosi, F., 1990. Networks for approximation
and learning. Proceedings of the IEEE, 78, 1481-1497.
Musavi, M., Ahmed, W., Chan, K., Faris, K., Hummels,
D., 1992. On the training of radial basis function
classifiers. Neural Networks, 5, 595–603.
Park, J., Sandberg, I.W., 1993. Approximation and radial-
basis-function networks. Neural Computation, 5, 305–
316.
Eberhart, R.C., Kennedy, J., 1995. Particle swarm
optimization. In: Proc. of IEEE Int. Conf. on Neural
Network, Perth, Australia (1995) 1942–1948.
Yousef, R., 2005. Training radial basis function networks
using reduced sets as center points. International
Journal of Information Technology, Vol. 2, pp. 21.
Zhang, J.-R., Zhang, J., Lok, T., Lyu, M., 2007. A hybrid
particle swarm optimization, back-propagation
algorithm for feed forward neural network training.
Applied Mathematics and Computation 185, 1026–
1037.
Poli, R., Kennedy, J., Blackwell, T., 2007. Particle swarm
optimization. An overview. Swarm Intelligence 1, 33–
57.
Pedrycz, W., Park, H.S., Oh, S.K., 2008. A Granular-
Oriented Development of Functional Radial Basis
Function Neural Networks. Neurocomputing, 72, 420–435.
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
450
