
A Petri Net Model for an Open Path Multi-AGV System
Davide Giglio
Department of Informatics, Bioengineering, Robotics and Systems Engineering, University of Genova, Genova, Italy
Keywords:
Coloured Petri Nets, Automated Distribution Warehouses, Autonomous Guided Vehicles, Forklift AGVs.
Abstract:
Automated distribution warehouses in which pallet and roll pallet loads are transported by means of forklift
AGVs are considered in this work, with the objective of defining a mathematical model which accurately
represents the behaviour of AGVs in the system. AGVs can move freely in the warehouse (an open path AGV
system is adopted), and their transportation activities can be modelled as a sequence of elementary or basic
actions. In the paper, a coloured Petri net (CPN) model is proposed. It allows representing any sequence of
elementary actions of AGVs (including pick-up and drop-off activities), and accurately models the interactions
among AGVs, in order to guarantee the safety during the execution of activities. The CPN model can be used
to analyse and implement deadlock prevention and deadlock recovery strategies, and it has been adopted in the
building of a discrete-event simulator which is employed to analyse the system’s performance and to evaluate
scheduling policies for transportation tasks.
1 INTRODUCTION
In the last century, the process of automating manu-
facturing systems and other business activities, aimed
at increasing the performance of the systems, has in-
volved both production tasks and transportation op-
erations. In this connection, autonomous guided ve-
hicles (AGVs) have been used to automate the trans-
portation of parts and materials within manufacturing
systems and other indoor or outdoor facilities (Vis,
2006; Le-Ahn and De Koster, 2006). The defini-
tion of an AGV system includes several activities that
can be related to the three standard decision-levels,
namely, the strategic level (layout design), the tactical
level (determination of the number of AGVs, dead-
lock prevention, planning of transportation activities),
and the operational/real-time control level (dispatch-
ing of AGVs, scheduling of transportation activities,
vehicle routing, deadlock avoidance). In this paper,
a mathematical model based on the graphical formal-
ism of the Petri nets (Petri, 1962; Murata, 1989) is
presented; it can be used to solve some of the prob-
lems to be dealt with at the tactical and operational
decision-levels.
In this work, automated distribution warehouses
are taken into account. In the considered class of sys-
tems, the storage area is laid with pallet and roll pallet
loads that must be moved to the gate area when the
trucks which will deliver the items to their final des-
tinations arrive at the warehouse. All transportation
activities are carried out by forklift AGVs (Seelinger
and Yoder, 2006; Mart´ınez-Barber´a and Herrero-
P´erez, 2010), which are not constrained to follow
any guide path as they can move freely along the
warehouse’s aisles; then, a free-ranging or open path
model (Sen et al., 1991; Duinkerken et al., 2006) is
adopted. In the system, several AGVs work simul-
taneously (multi-AGV system) and cooperate to par-
allelize the execution of truck loading activities, thus
minimizing the overall completion time.
The management of an open path multi-AGV sys-
tem is of a crucial importance, in particular to guar-
antee the safety during the execution of transportation
activities. Even if vehicles are nowadays equipped
with devices (e.g., lasers) to detect obstacles and other
vehicles, it is necessary to accurately model the move-
ments of AGVs in order to dispatch AGVs, schedule
their activities, and route them in an efficient and safe
way. In this paper, a coloured Petri net (Jensen and
Kristensen, 2009) model, representing all elemen-
tary actions of AGVs (including pick-up and drop-
off activities) and precisely modelling the interactions
among AGVs, is proposed.
The Petri net formalism has been adopted to
model AGVs from the nineties (Holloway and Krogh,
1990; Lee and DiCesare, 1994), and since then Petri
nets have been used to analyse the system’s perfor-
mance, to dispatch AGVs and schedule their activi-
ties, and to analyse and implement deadlock preven-
tion strategies. In (Castillo et al., 2001), the perfor-
734
Giglio D..
A Petri Net Model for an Open Path Multi-AGV System.
DOI: 10.5220/0005054807340745
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 734-745
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
AISLE H1A
AISLE H1B
AISLE H2A
AISLE H2B
AISLE H3A
AISLE H3B
AISLE V1A
LE V1B
AISLE V2A
AISLE V2B
AISLE V3A
AISLE V3B
DROP-OFFDROP-OFFDROP-OFF DROP-OFFDROP-OFF DROP-OFF DROP-OFFDROP-OFF
AREAAREAAREA AREAAREA AREA AREAAREA
BUFFER AREABUFFER AREA BUFFER AREABUFFER AREA BUFFER AREABUFFER AREA BUFFE
GA
ER AREA
ATE 2
BUFFER
GATEGATE 1
GATE 3 GATE 4 GATE 5 GATE 7 GATE 9
GATE 1
GATE 4
GATE 5
GATE 7 GATE 9
SHOP 1
SHOP 2
SHOP 3
SHOP 4
SHOP 5
SHOP 6
SHOP 7
SHOP 8
SHOP 9
SHOP 10
SHOP 11
SHOP 12
SHOP 13
SHOP 14
P 15
SHO
SHOP 17
SHOP 18
SHOP 19
SHOP 20
SHOP 21
SHOP 22
SHOP 23
SHOP 24
SHOP 25
SHOP 26
SHOP 27
STORAGE LANE
STORAGE LANE
STORAGE LANE
STORAGE LANE
...
1
2
3
4
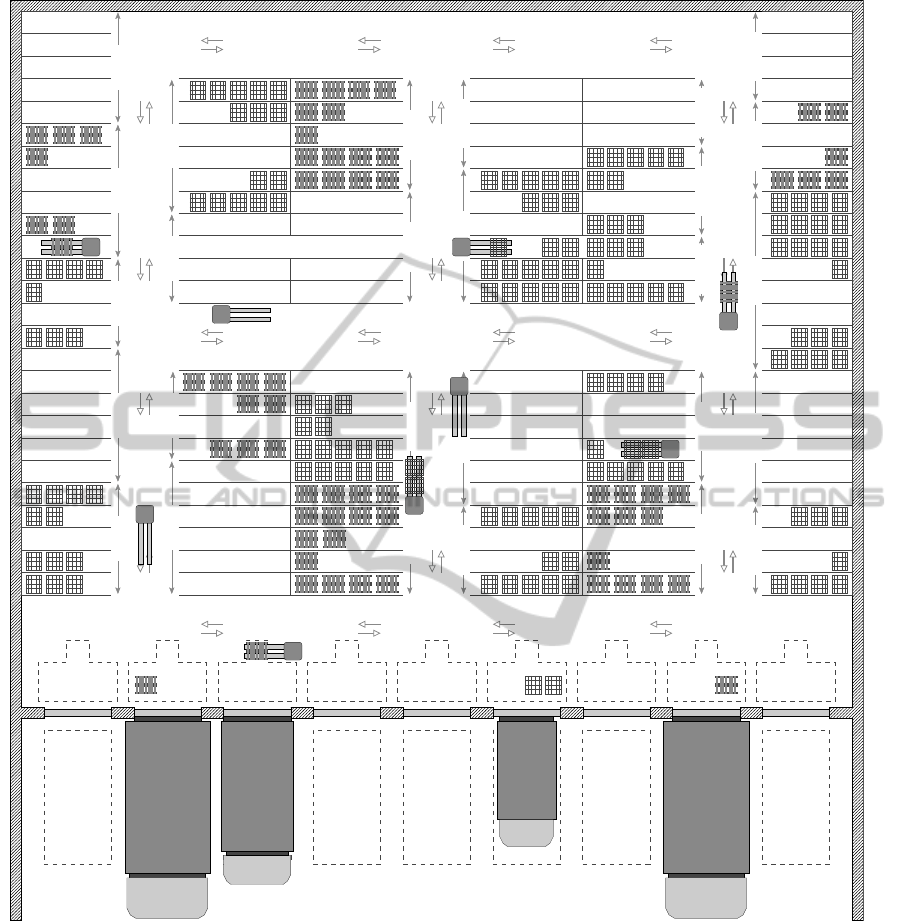
Figure 1: The distribution warehouse.
mance of a tandem AGV system is analysed through
a generalized stochastic Petri net (GSPN) model (Aj-
mone Marsan et al., 1984); deadlock issues are con-
sidered in (Wu and Zhou, 2005), where a maximally
permissivedeadlock avoidance policy is proposed; re-
cently, in (Nishi and Maeno, 2010) and (Nishi and
Tanaka, 2012), Petri nets have been used to dispatch
AGVs and to route them within an AGV system. The
coloured Petri nets has been adopted in (Hsieh, 1998;
Hsieh and Chen, 1999; Dotoli and Fanti, 2004; Aized,
2009) to model, analyse, and simulate AGV systems.
However, in all these works, the considered AGV
systems are guided path, in which AGVs are con-
strained to follow the arcs (generally unidirectional)
of a network representing the available routes/paths
for AGVs in the system.
Instead, in this paper, an open path AGV system
is adopted, since it allows more flexibility in manag-
ing the time-variant AGVs’ tasks that have to be ac-
complished in the considered class of systems. As it
will be described in the following section, AGVs are
required to travel paths which change with time, as
the pick-up and drop-off points change dynamically
on the basis of the trucks’ arrivals and of the assign-
APetriNetModelforanOpenPathMulti-AGVSystem
735

ment of the gates to the trucks; moreover, the vertical
aisles must be traveled by AGVs both in the left side
and in the right side, since the loads to be picked-up
are placed next to both sides of the aisles (see Fig-
ure 1). A guided path system for the considered class
of warehouses would require a very large number of
paths, thus making that kind of approach very com-
plex. Therefore, an open path model is preferred.
This paper is organizedas follows. In section 2 the
class of distribution warehouses and the adopted sys-
tem model are respectively introduced. The coloured
Petri net model is proposed in section 3. Issues about
deadlock prevention and deadlock recovery are dealt
with in section 4, whereas in section 5 some conclud-
ing remarks are reported.
2 THE DISTRIBUTION
WAREHOUSE
In the considered class of warehouses, items to be de-
livered are stacked and stored on pallet and roll pal-
let loads (pallets and rolls, simply), which are placed
on the floor in short lanes that are physically defined
among the warehouse’s aisles (storage lanes). An ex-
ample of distribution warehouse is illustrated in Fig-
ure 1. Each lane may contain a variable number of
pallets (usually 3 or 4) or rolls (usually 4 or 5), which
are lined up in a row since a lane is about 1 meter
wide. Each storage lane is associated with a “shop”
(e.g., a store or a supermarket) and each shop consists
of one or more consecutive lanes. In general, each
shop holds either pallets or rolls. Shops/lanes are ac-
cessible only through the vertical aisles and only one
side of a storage lane can be approached by the fork-
lift AGVs to get the loads, as illustrated in Figure 1.
Both the horizontal and the vertical aisles are about 3
meters wide, but the horizontal aisle adjacent to the
gate zone, which is wider as it includes the buffer ar-
eas where pallets and rolls, just dropped off by the
forklift AGVs, are temporarily left. Bidirectional traf-
fic of transportation resources is allowed in any aisle,
and AGVs are not required to respect any right-hand
or left-hand rule.
Warehouse activities start each day in the after-
noon and conclude in the morning of the next day.
In the afternoon the orders of stores and supermar-
kets are processed, pallets and rolls are prepared and
moved to the storage lanes corresponding to the shop
to which items have to be delivered (the warehouse is
initially empty). These operations are man-made and
can last up to the evening. In the early morning of the
following day (from about 4 a.m.), trucks arrive at the
distribution warehouse (in accordance with a prede-
fined schedule); each truck has to deliver items to one
or more shops and then pallets and/or rolls are trans-
ported from the storage lanes relevant to those shops
to the buffer area of the gate at which the truck is
parked. A forklift AGV moves to the open side of the
lane, enters the lane horizontally, picks either 1 pallet
or 1 roll or 2 rolls up, exits the lane, travels towards
the relevant gate where it drops the pallet/roll(s) off in
a dedicated zone next to the buffer area of the gate
(drop-off area). This sequence of operations made
by an AGV (empty transfer, pick-up, transportation,
drop-off) represents a single task to be accomplished
by the transportation resource. Activities end when
all pallets and rolls have been delivered.
2.1 The System Model
In order to obtain a system model which allows rep-
resenting the behaviour of AGVs in the distribution
warehouse, the layout (in particular, the horizontal
and the vertical aisles) is divided into cells of approx-
imately the same size (0.8-1 m × 0.8-1 m) so that
a forklift AGV occupies 3 cells when moving in the
warehouse, as illustrated in Figure 2. The position of
a forklift AGV is defined by the cell which is occupied
by the extremities of the forks, and by the direction of
the AGV which is specified by the “truck” part of it
(then, an AGV has north direction when its forks are
down-side with respect to the truck, has east direction
when its forks are left-side, and so on, for example,
the AGV which is in the aisle V1B has north direc-
tion). The state of a forklift AGV consists of the po-
sition and the load which is transported (no load, 1
pallet, 1 roll, 2 rolls).
An AGV is allowed to execute three kinds of ele-
mentary movements: move straight, rotate 90
◦
, and
turn; they lead to eight “basic actions” which are:
movenorth, move east, move south, movewest, rotate
90
◦
clockwise, rotate 90
◦
counterclockwise, turn left,
and turn right. A forklift AGV with a certain position
is allowed to perform one or more basic actions (for
example, with reference to Figures 1 and 2, the AGV
which is in the aisle H2A can either move west or
rotate counterclockwise or turn left; turn right is not
allowed since the presence of the corner of the stor-
age lane). All trips, from whichever cell to another
different cell, can be defined as a sequence of basic
actions. Other movements are relevant to the loading
and unloading activities; in this case, a loading action
includes all the basic movements which are necessary
to enter a lane, to place the AGV in the right posi-
tion, to pick the pallet or the roll(s) up, and to exit the
lane; in the same way, an unloading action includes
all the basic movements which are necessary to place
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
736
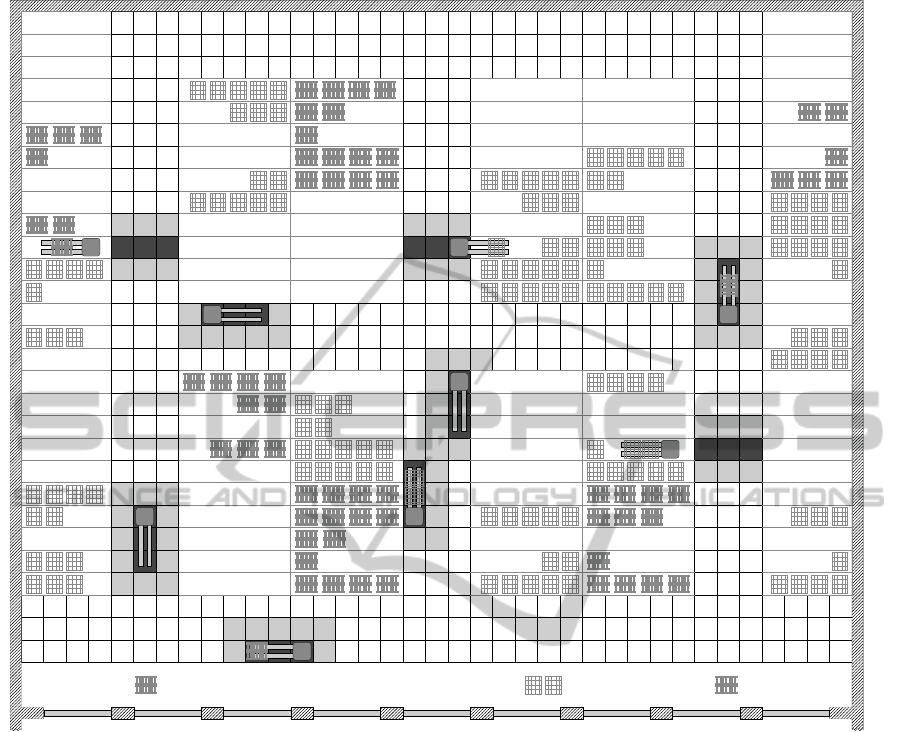
Figure 2: The system model.
the AGV in the right position and to drop the pallet or
the roll(s) off.
It is worth remarking that the proposed model
can be quite easily enhanced by adding further basic
movements, such as, for example, a diagonal move-
ment to be used to change lane when travelling an
aisle; the new movements would be then modelled
within the CPN representation by following the same
reasoning lines used to model the three kinds of el-
ementary movements here taken into account (de-
scribed in section 3). In any case, the considered ba-
sic movements allows the AGVs to freely travel in the
warehouse, that is, the AGVs can run through an aisle
in any direction and to do that they can stay in the
middle or in any of the side parts of the aisle.
2.2 On Representing the System Model
by means of Coloured Petri Nets
The system model is represented in this paper by
means of coloured Petri nets (CPNs), with the aim
of providing a formal model to be used to analyse the
performanceof the system, to define deadlock preven-
tion and recovery strategies, and to simulate AGVs
tasks. The choice of using CPNs, instead of (classic)
Petri nets, is due to the need of representing differ-
ent types of loads (pallets and rolls), different states
of the AGV (empty, loaded with 1 pallet, loaded with
1 roll, or loaded with 2 rolls), and different states of
the cells which form the layout. The adopted class of
CPN is the one proposed in (Jensen and Kristensen,
2009), whose definition is the following.
Definition 1. A (non-hierarchical) Coloured Petri
Net is a nine-tuple CPN = (P, T, A, Σ, V, C, G, E, I),
where:
1. P is a finite set of places;
2. T is a finite set of transitions (P∩ T =
/
0);
3. A ⊆ P× T ∪ T × P is a set of directed arcs;
4. Σ is a finite set of non empty colour sets;
APetriNetModelforanOpenPathMulti-AGVSystem
737

5. V is a finite set of typed variables such that
Type[v] ∈ Σ for all variables v ∈ V;
6. C : P → Σ is a colour set function that assigns a
colour set to each place;
7. G : T → Expr
V
is a guard function that assigns a
guard to each transition t such that Type[G(t)] =
Bool;
8. E : A → Expr
V
is an arc expression function that
assigns an arc expression to each arc a such that
Type[E(a)] = C(p)
MS
, where p is the place con-
nected to the arc a;
9. I : P → Expr
/
0
is an initialization function that as-
signs an initialization expression to each place p
such that Type[I(p)] = C(p)
MS
.
In the proposed model, the i-th cell of the layout
is modelled through two places, namely, p
i
and s
i
.
Place p
i
models the presence of a forklift AGV in the
cell, in particular, the presence of the extremities of
the forks (then, each AGV, even if it physically occu-
pies 3 cells, is represented by a single token moving
through places p
i
). Place s
i
represents the state of the
cell, which is defined on the basis of the following
safety-related considerations.
In an open path multi-AGV system, in which
AGVs can move freely in the system layout, safety
is of primary importance. In the proposed system,
safety is guaranteed by assuming that no AGV can
be in any of the cells that are adjacent to the three
occupied by another AGV. In this way, there is al-
ways 0.8-1 meter (at least) between two AGVs. In
Figure 2, the light grey cells surrounding each AGV
are those that cannot be occupied by another AGV. In
other words, an AGV physically occupies three cells
(the dark grey cells) and virtually occupies a maxi-
mum of 12 cells (the light grey ones). Then, before
executing any action or movement, it is always neces-
sary to verify if such a safety constraint is satisfied or
not (in this connection, note that cells that are virtu-
ally occupied by an AGV can be also virtually occu-
pied by another AGV). In the rest of the paper, a cell
is:
• “O” (occupied) when it is physically occupied;
• “V” (virtual) when it is virtually occupied;
• “A” (available) if it is neither physically nor virtu-
ally occupied.
Further places of the CPN model are relevant to
the storage lanes and to the drop-off areas. Place l
a
represents the a-th storage lanes (the marking of l
a
models the presence of pallets and/or rolls to be trans-
ported), whereas place d
b
represents the b-th drop-off
area (the marking of d
b
models the presence of pallets
and/or rolls that are ready to be loaded on the truck).
On the basis of such considerations, the following
sets P, Σ, C, V characterize the proposed CPN model.
P = {p
i
, s
i
, l
a
, d
b
;
i = 1, . . . , N, a = 1, . . . , L, b = 1, . . . , D}
(1)
being N, L, and D, the number of cells which form the
layout, the number of storage lanes and the number of
drop-off areas/gates, respectively;
Σ = { CELL, LOAD, LTYPE, NO, DIR,
LTYPE× NO× DIR}
(2)
where the colour sets in (2) are defined as
CELL = {O, V, A} (3)
LOAD = {P, R} (4)
LTYPE = {none, P, R} (5)
NO = {0, 1, 2} (6)
DIR = {N, E, S, W} (7)
(P and R stand for pallet and roll, respectively; N, E
S, and W stand for north, east, south, and west, re-
spectively);
C(p
i
) = LTYPE× NO× DIR i = 1, . . . , N (8)
C(s
i
) = CELL i = 1, . . . , N (9)
C(l
a
) = LOAD a = 1, . . . , L (10)
C(d
b
) = LOAD b = 1, . . . , D (11)
V = {c
i
: CELL;q : LOAD;l : LTYPE;n : NO;
d : DIR;i = 1, . . . , N}
(12)
The transitions of the CPN represent the execu-
tions of the basic actions. Set T is defined as follows.
T = {t
i− j
, t
i−i
, t
P
i−a
, t
D
i−b
;
(i, j) ∈ E , (i, a) ∈ L , (i, b) ∈ D}
(13)
being E , L, and D respectively the set of pairs (i, j)
such that it exists an elementary movement (move
straight or turn) which carries an AGV from the cell i
to the cell j, the set of pairs (i, a) such that the cell i
is next to the storage lane a, and the set of pairs (i, b)
such that the cell i corresponds to the drop-off area b.
Then, transitions of type t
i− j
are relevant to a move
straight or a turn action, those of type t
i−i
are relevant
to a rotate action, whereas transitions of typest
P
i−a
and
t
D
i−b
model respectively a pick-up activity and a drop-
off one.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
738
3 THE CPN MODEL
The CPN representing the whole system can be ob-
tained by suitably merging the nets representing each
cell. Since the set of actions that an AGV can take de-
pends on the position of the AGV in the system lay-
out, such nets can be different one from another. In
order to generalize the behaviour of an AGV within
a distribution warehouse of the considered class, it is
possible to refer to the generic portion of system lay-
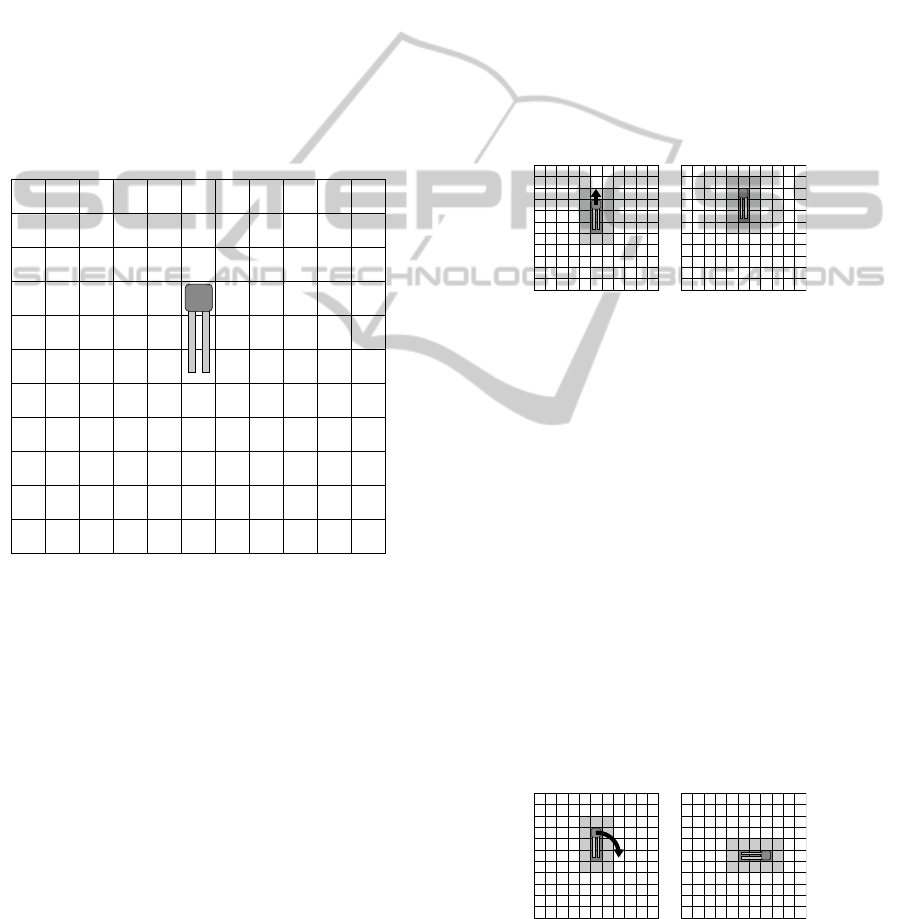
out illustrated in Figure 3, which consists of 121 cells
(11× 11 grid). Such a portion is generic in the sense
that all basic actions (move straight, rotate 90
◦
, and
turn) are allowed for an AGV with the extremities of
the forks in the central cell, namely c
61
, and having
any direction (the AGV in Figure 3 has north direc-
tion but it is evident that it can have any direction).
c
1
c
2
c
3
c
4
c
5
c
6
c
7
c
8
c
9
c
10
c
11
c
12
c
13
c
14
c
15
c
16
c
17
c
18
c
19
c
20
c
21
c
22
c
23
c
24
c
25
c
26
c
27
c
28
c
29
c
30
c
31
c
32
c
33
c
34
c
35
c
36
c
37
c
38
c
39
c
40
c
41
c
42
c
43
c
44
c
45
c
46
c
47
c
48
c
49
c
50
c
51
c
52
c
53
c
54
c
55
c
56
c
57
c
58
c
59
c
60
c
61
c
62
c
63
c
64
c
65
c
66
c
67
c
68
c
69
c
70
c
71
c
72
c
73
c
74
c
75
c
76
c
77
c
78
c
79
c
80
c
81
c
82
c
83
c
84
c
85
c
86
c
87
c
88
c
89
c
90
c
91
c
92
c
93
c
94
c
95
c
96
c
97
c
98
c
99
c
100
c
101
c
102
c
103
c
104
c
105
c
106
c
107
c
108
c
109
c
110
c
111
c
112
c
113
c
114
c
115
c
116
c
117
c
118
c
119
c
120
c
121
Figure 3: An AGV in a generic portion of a system layout.
Since every part of the system layout (vertical and
horizontal lanes, X-crossroads, T-crossroads, etc.)
can be “mapped” to such generic portion of the sys-
tem layout, the net representing the behaviour of an
AGV in a specific cell can be obtained from the
net representing the “meta-cell” c
61
by removing all
places, transitions, and arcs which are “not involved”,
that is, which refer to cells that are outside of the
“mapped” part. An example relevant to a cell in the
middle-right side of a vertical aisle will be provided
in subsection 3.3.
3.1 Basic Actions
The 5 basic actions (move straight, rotate 90
◦
clock-
wise, rotate 90
◦
counterclockwise, turn left, turn
right) that can be taken by the AGV illustrated in Fig-
ure 3 are now described in detail. The states of the
AGV and of the layout at the start of the movement
are characterized by:
• Start position (cell) of the AGV: c
61
Start direction of the AGV: north
• O-cells in the layout: c
39
, c
50
, c
61
V-cells in the layout: c
27
, c
28
, c
29
, c
38
, c
40
, c
49
,
c
51
, c
60
, c
62
, c
71
, c
72
, c
73
It is worth noting that the 15 further actions that
can be taken by the AGV in c
61
when its direction is
east or south or west can be easily derived from those
here considered.
3.1.1 Move Straight
This action can be taken only when the cells c
16
, c
17
,
and c
18
are not O.
START
END
Figure 4: AGV’s behavior in move straight action.
The states of the AGV and of the layout at the end
of the movement are characterized by:
• End position (cell) of the AGV: c
50
End direction of the AGV: north
• O-cells in the layout: c
28
, c
39
, c
50
V-cells in the layout: c
16
, c
17
, c
18
, c
27
, c
29
, c
38
,
c
40
, c
49
, c
51
, c
60
, c
61
, c
62
The states of the cells that have been “released” in
consequence of the movement, namely c
71
, c
72
, and
c
73
, become either V or A depending on the states of
the cells c
59
, c
63
, c
70
, c
74
, c
81
, c
82
, c
83
, c
84
, and c
85
(for example, c
71
is V if one of c
59
, c
70
, c
81
, c
82
, c
83
is O, and is A otherwise).
3.1.2 Rotate 90
◦
Clockwise
This action can be taken only when cells the c
41
, c
52
,
and c
63
are A.
START
END
Figure 5: AGV’s behavior in rotate 90
◦
clockwise action.
The states of the AGV and of the layout at the end
of the movement are characterized by:
APetriNetModelforanOpenPathMulti-AGVSystem
739

• End position (cell) of the AGV: c
61
End direction of the AGV: east
• O-cells in the layout: c
61
, c
62
, c
63
V-cells in the layout: c
49
, c
50
, c
51
, c
52
, c
53
, c
60
,
c
64
, c
71
, c
72
, c
73
, c
74
, c
75
The states of the cells that have been released in con-
sequence of the movement, namely c
27
, c
28
, c
29
, c
38
,
c
39
, and c
40
, become either A or V depending on the
states of the cells c
15
, c
16
, c
17
, c
18
, c
19
, c
26
, c
37
, and
c
48
(cells c
39
and c
40
become A for certain).
3.1.3 Rotate 90
◦
Counterclockwise
This action is very similar to the rotate 90
◦
clockwise
action; the details are not given as they can be eas-
ily derived on the basis of what reported in subsec-
tion 3.1.2.
3.1.4 Turn Left
This action can be taken only when the cells c
14
, c
15
,
and c
16
are A.
START
END
Figure 6: AGV’s behavior in turn left action.
The states of the AGV and of the layout at the end
of the movement are characterized by:
• End position (cell) of the AGV: c
16
End direction of the AGV: west
• O-cells in the layout: c
14
, c
15
, c
16
V-cells in the layout: c
2
, c
3
, c
4
, c
5
, c
6
, c
13
, c
17
,
c
24
, c
25
, c
26
, c
27
, c
28
The states of the cells that have been released in con-
sequence of the movement, namely c
29
, c
38
, c
39
, c
40
,
c
49
, c
50
, c
51
, c
60
, c
61
, c
62
, c
71
, c
72
, and c
73
, become
either A or V depending on the states of the cells c
18
,
c
19
, c
30
, c
37
, c
41
, c
48
, c
52
, c
59
, c
63
, c
70
, c
74
, c
81
, c
82
,
c
83
, c
84
, and c
85
(cells c
39
, c
50
, and c
61
become A for
certain).
3.1.5 Turn Right
This action is very similar to the turn left action; the
details are not given as they can be easily derived on
the basis of what reported in subsection 3.1.4.
3.1.6 Other Actions (Pick-up and Drop-off)
When an AGV is in a vertical aisle, has east or west
direction, and is in a cell next to a storage lane, it can
pick-up a load in the lane (if any) if it is either empty
(in this case it can pick-up either 1 pallet or 1 roll or
2 rolls) or carrying 1 roll (in this case it can pick-up 1
roll). For what concerns the availability (physical or
virtual) of cells, the pick-up activity does not require
specific conditions to be fulfilled as it is assumed that
the cells that are O and V when the activity starts,
remain in their state throughout the execution of the
activity.
Similarly, when an AGV has east or west direction
and is in a cell which corresponds to a drop-offarea, it
can drop-off its load(s). As before, the drop-off activ-
ity does not require specific conditions on the state of
the near cells (also in this case the cells that are O and
V at the beginning remain in their state throughout the
execution of the activity).
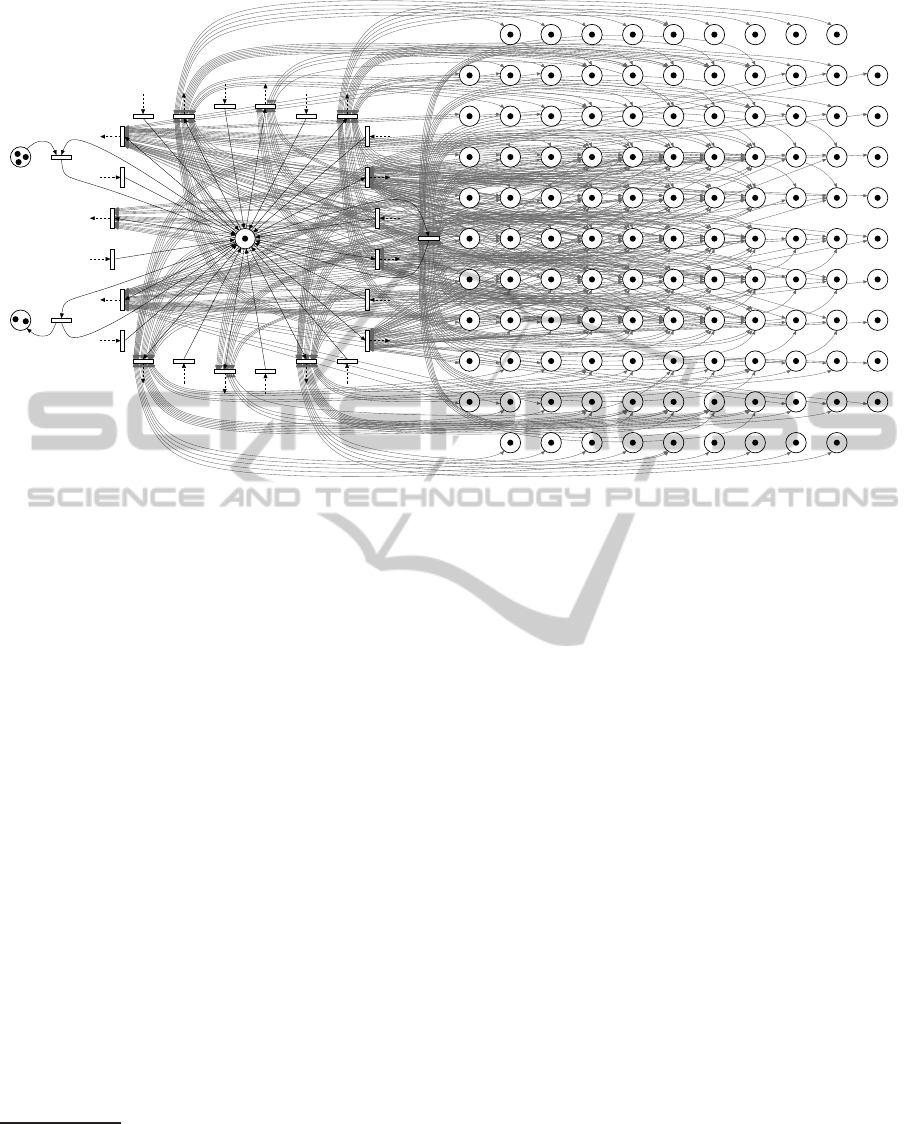
3.2 The CPN Model of the Meta-cell
The coloured Petri net which models all the consid-
ered behaviours of an automatic guided vehicle which
is in cell c
61
of the 11×11 layout portion represented
in Figure 3, is illustrated in Figure 7. Such a net is
undoubtedly complex due to the presence of several
arcs. However, in order to evaluate the complexity of
the nets that are generated, it is necessary to take into
account the fact that only a subset of basic actions are
allowed in each of the cells which are present in the
layout of the class of warehouses considered in this
paper (such as the one illustrated in Figures 1 and 2);
this significantly reduces the number of transitions.
Moreover, since the aisles are 3 cells wide, the tran-
sitions representing the basic actions will be actually
connected with a reduced number of s
i
places; this
greatly reduces the number of arcs.
In this connection, in the following subsection the
CPN representing a specific part in the layout of Fig-
ure 2 (a cell in the middle / right side of the aisle V2A)
is described. It can be derived from the generic one
illustrated in Figure 7 but it has a limited number of
transitions and especially arcs.
Before describing such a simpler net, it is worth
noting that the places representing the state of a cell,
namely s
i
, i = 1, . . . , N, always contains 1 and only
1 token (or, equivalently, they are safe and always
marked); however, the colour of the token of such
places changes on the basis of the evolution of tokens
through places p
i
, i = 1, . . . , N, in accordance with the
arc expression function (places p
i
are safe but not al-
ways marked).
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
740
s
2
s
3
s
4
s
5
s
6
s
7
s
8
s
9
s
10
s
12
s
13
s
14
s
15
s
16
s
17
s
18
s
19
s
20
s
21
s
22
s
23
s
24
s
25
s
26
s
27
s
28
s
29
s
30
s
31
s
32
s
33
s
34
s
35
s
36
s
37
s
38
s
39
s
40
s
41
s
42
s
43
s
44
s
45
s
46
s
47
s
48
s
49
s
50
s
51
s
52
s
53
s
54
s
55
s
56
s
57
s
58
s
59
s
60
s
61
s
62
s
63
s
64
s
65
s
66
s
67
s
68
s
69
s
70
s
71
s
72
s
73
s
74
s
75
s
76
s
77
s
78
s
79
s
80
s
81
s
82
s
83
s
84
s
85
s
86
s
87
s
88
s
89
s
90
s
91
s
92
s
93
s
94
s
95
s
96
s
97
s
98
s
99
s
100
s
101
s
102
s
103
s
104
s
105
s
106
s
107
s
108
s
109
s
110
s
112
s
113
s
114
s
115
s
116
s
117
s
118
s
119
s
120
l
a
d
b
p
61
p
50
p
50
p
62
p
62
p
72
p
72
p
60
p
60
p
16
p
16
p
54
p
54
p
106
p
106
p
68
p
68
p
18
p
18
p
76
p
76
p
104
p
104
p
46
p
46
(MOVE NORTH)
(MOVE EAST)
(MOVE SOUTH)
(MOVE WEST)
(TURN LEFT)
(TURN LEFT)
(TURN LEFT)
(TURN LEFT)
(TURN RIGHT)
(TURN RIGHT)
(TURN RIGHT)
(TURN RIGHT)
(ROTATE)
(PICK-UP)
(DROP-OFF)
Figure 7: The CPN model of the meta-cell of the system layout.
3.3 The CPN Model for a Cell in a
Vertical Aisle
The specific CPN representing a cell in the middle /
right side of a vertical aisle is illustrated in Figure 8.
In such a cell, an AGV can pick-up loads (by firing
transition t
P
132−71
), rotate (transition t
132−132
), leave
the cell by moving either to north (transition t
132−84
)
or to south (transition t
132−135
). The arc expressions
1
and the guard function which characterize such ac-
tions are reported in the following subsections (the
arc expressions, which update the state of the cells,
are not discussed for the sake of brevity).
3.3.1 Action: Move North
Arc Expressions
E(p
132
, t
132−84
) = 1
′
(l, n, d)
E(t
132−84
, p
84
) = 1
′
(l, n, d)
E(s
74
, t
132−84
) = 1
′
c
74
E(t
132−84
, s
74
) = 1
′
V
E(s
75
, t
132−84
) = 1
′
c
75
E(t
132−84
, s
75
) = 1
′
V
E(s
78
, t
132−84
) = 1
′
V E(t
132−84
, s
78
) = 1
′
O
E(s
130
, t
132−84
) = 1
′
c
130
E(t
132−84
, s
130
) = 1
′
c
130
1
In accordance with (Jensen and Kristensen, 2009), arc
expressions are specified by using the infix operator
′
which
takes a positive integer as its left argument, specifying the
number of tokens of the colour provided as the right ar-
gument that are removed from (resp., added to) the place
which is the origin (resp., the destination) of the arc.
E(s
132
, t
132−84
) = 1
′
O E(t
132−84
, s
132
) = 1
′
V
E(s
133
, t
132−84
) = 1
′
c
133
E(t
132−84
, s
133
) = 1
′
c
133
E(s
134
, t
132−84
) = 1
′
V
E(t
132−84
, s
134
) = if (c
130
= O) ∨ (c
133
= O)
∨(c
193
= O) ∨ (c
194
= O) ∨ (c
195
= O) then 1
′
V
else 1
′
A
E(s
135
, t
132−84
) = 1
′
V
E(t
132−84
, s
135
) = if (c
194
= O) ∨ (c
195
= O)
then 1
′
V else 1
′
A
E(s
193
, t
132−84
) = 1
′
c
193
E(t
132−84
, s
193
) = 1
′
c
193
E(s
194
, t
132−84
) = 1
′
c
194
E(t
132−84
, s
194
) = 1
′
c
194
E(s
195
, t
132−84
) = 1
′
c
195
E(t
132−84
, s
195
) = 1
′
c
195
Guard Function
G(t
132−84
) = (d = N) ∧
(c
74
6= O) ∧ (c
75
6= O)
The AGV can move towards north if its direction
is N and if the two cells c
74
and c
75
are not physically
occupied.
3.3.2 Action: Rotate
Arc Expressions
E(p
132
, t
132−132
) = 1
′
(l, n, d)
E(t
132−132
, p
132
) = 1
′
(l, n, e)
E(s
73
, t
132−132
) = 1
′
c
73
E(t
132−132
, s
73
) = 1
′
c
73
APetriNetModelforanOpenPathMulti-AGVSystem
741

c
76
c
77
c
78
c
79
c
80
c
81
c
82
c
83
c
84
c
130
c
131
c
132
c
133
c
134
c
135
c
193
c
194
c
195
c
196
c
197
c
198
STORAGE
LANE N. 71
l
71
p
132
t
84−132
t
132−84
t
132−135
t
135−132
t
132−132
t
P
132−71
s
73
s
74
s
75
s
76
s
77
s
78
s
79
s
80
s
81
s
82
s
83
s
84
s
130
s
131
s
132
s
133
s
134
s
135
s
193
s
194
s
195
s
196
s
197
s
198
s
199
s
200
s
201
FROM
FROM
TO
TO
p
84
p
84
p
135
p
135
Figure 8: Specific CPN model for a cell in the middle/right side of a vertical aisle.
E(s
74
, t
132−132
) = 1
′
c
74
E(t
132−132
, s
74
) = 1
′
c
74
E(s
75
, t
132−132
) = 1
′
c
75
E(t
132−132
, s
75
) = 1
′
c
75
E(s
77
, t
132−132
) = select case (d, e): case (N, W) →
1
′
V; else → 1
′
c
77
E(t
132−132
, s
77
) = select case (d, e): case (N, W) →
if (c
73
= O) ∨ (c
74
= O) ∨ (c
75
= O) then 1
′
V
else 1
′
A; case (W, N) → 1
′
V; else → 1
′
c
77
E(s
78
, t
132−132
) = select case (d, e): case (N, W) →
1
′
V; else → 1
′
c
78
E(t
132−132
, s
78
) = select case (d, e): case (N, W) →
if (c
74
= O) ∨ (c
75
= O) then 1
′
V else 1
′
A;
case (W, N) → 1
′
V; else → 1
′
c
78
E(s
79
, t
132−132
) = select case (d, e): case
(N, W)
∨(W, N)
→ 1
′
A; else → 1
′
c
79
E(t
132−132
, s
79
) = select case (d, e): case
(N, W)
∨(W, N)
→ 1
′
A; else → 1
′
c
79
E(s
80
, t
132−132
) = select case (d, e): case (N, W) →
1
′
V; case (W, N) → 1
′
A; else → 1
′
c
80
E(t
132−132
, s
80
) = select case (d, e): case (N, W) →
1
′
A; case (W, N) → 1
′
V; else → 1
′
c
80
E(s
81
, t
132−132
) = select case (d, e): case (N, W) →
1
′
O; case (W, N) → 1
′
A; else → 1
′
c
81
E(t
132−132
, s
81
) = select case (d, e): case (N, W) →
1
′
A; case (W, N) → 1
′
O; else → 1
′
c
81
E(s
82
, t
132−132
) = select case (d, e): case (N, W) →
1
′
A; case (S, W) → 1
′
c
82
; else → 1
′
V
E(t
132−132
, s
82
) = select case (d, e): case (W, N) →
1
′
A; case (W, S) → if (c
79
= O) ∨ (c
80
= O)
then 1
′
V else 1
′
A; else → 1
′
V
E(s
84
, t
132−132
) = select case (d, e): case (N, W) →
1
′
O; else → 1
′
V
E(t
132−132
, s
84
) = select case (d, e): case (W, N) →
1
′
O; else → 1
′
V
E(s
130
, t
132−132
) = select case (d, e): case
(N, W)
∨(S, W)
→ 1
′
A; else → 1
′
O
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
742

E(t
132−132
, s
130
) = select case (d, e): case
(N, W)
∨(S, W)
→ 1
′
O; else → 1
′
A
E(s
131
, t
132−132
) = select case (d, e): case
(N, W)
∨(S, W)
→ 1
′
V; else → 1
′
O
E(t
132−132
, s
131
) = select case (d, e): case
(N, W)
∨(S, W)
→ 1
′
O; else → 1
′
V
E(s
133
, t
132−132
) = select case (d, e): case (N, W) →
1
′
c
133
; case (S, W) → 1
′
A; else → 1
′
V
E(t
132−132
, s
133
) = select case (d, e): case (W, N) →
if (c
193
= O) ∨ (c
194
= O) then 1
′
V else 1
′
A;
case (W, S) → 1
′
A; else → 1
′
V
E(s
135
, t
132−132
) = select case (d, e): case (S, W) →
1
′
O; else → 1
′
V
E(t
132−132
, s
135
) = select case (d, e): case (W, S) →
1
′
O; else → 1
′
V
E(s
193
, t
132−132
) = select case (d, e): case
(S, W)
∨(W, S)
→ 1
′
A; else → 1
′
c
193
E(t
132−132
, s
193
) = select case (d, e): case
(S, W)
∨(W, S)
→ 1
′
A; else → 1
′
c
193
E(s
194
, t
132−132
) = select case (d, e): case (S, W) →
1
′
V; case (W, S) → 1
′
A; else → 1
′
c
194
E(t
132−132
, s
194
) = select case (d, e): case (S, W) →
1
′
A; case (W, S) → 1
′
V; else → 1
′
c
194
E(s
195
, t
132−132
) = select case (d, e): case (S, W) →
1
′
O; case (W, S) → 1
′
A; else → 1
′
c
195
E(t
132−132
, s
195
) = select case (d, e): case (S, W) →
1
′
A; case (W, S) → 1
′
O; else → 1
′
c
195
E(s
197
, t
132−132
) = select case (d, e): case (S, W) →
1
′
V; else → 1
′
c
197
E(t
132−132
, s
197
) = select case (d, e): case (S, W) →
if (c
199
= O) ∨ (c
200
= O) ∨ (c
201
= O) then 1
′
V
else 1
′
A; case (W, S) → 1
′
V; else → 1
′
c
197
E(s
198
, t
132−132
) = select case (d, e): case (S, W) →
1
′
V; else → 1
′
c
198
E(t
132−132
, s
198
) = select case (d, e): case (S, W) →
if (c
200
= O) ∨ (c
201
= O) then 1
′
V else 1
′
A;
case (W, S) → 1
′
V; else → 1
′
c
198
E(s
199
, t
132−132
) = 1
′
c
199
E(t
132−132
, s
199
) = 1
′
c
199
E(s
200
, t
132−132
) = 1
′
c
200
E(t
132−132
, s
200
) = 1
′
c
200
E(s
201
, t
132−132
) = 1
′
c
201
E(t
132−132
, s
201
) = 1
′
c
201
Guard Function
G(t
132−132
) =
(d = N) ∧ (e = W) ∧
(c
79
= A)
∧ (c
82
= A) ∧ (c
130
= A)
∨
(d = W)
∧
(e = N) ∧
(c
79
= A) ∧ (c
80
= A)
∧ (c
81
= A)
∨
(e = S) ∧
(c
193
= A)
∧ (c
194
= A) ∧ (c
195
= A)
∨
(d = S)
∧ (e = W) ∧
(c
130
= A) ∧ (c
133
= A)
∧ (c
193
= A)
The AGV can rotate:
• counterclockwise, from direction N to W, if its
direction is N and if the three cells c
79
, c
82
, and
c
130
are available;
• clockwise, from direction W to N, if its direction
is W and if the three cells c
79
, c
80
, and c
81
are
available;
• counterclockwise, from direction W to S, if its di-
rection is W and if the three cells c
193
, c
194
, and
c
195
are available;
• clockwise, from direction S to W, if its direction
is S and if the three cells c
130
, c
133
, and c
193
are
available.
3.3.3 Action: Move South
Arc Expressions
E(p
132
, t
132−135
) = 1
′
(l, n, d)
E(t
132−135
, p
135
) = 1
′
(l, n, d)
E(s
79
, t
132−135
) = 1
′
c
79
E(t
132−135
, s
79
) = 1
′
c
79
E(s
80
, t
132−135
) = 1
′
c
80
E(t
132−135
, s
80
) = 1
′
c
80
E(s
81
, t
132−135
) = 1
′
c
81
E(t
132−135
, s
81
) = 1
′
c
81
E(s
82
, t
132−135
) = 1
′
c
82
E(t
132−135
, s
82
) = 1
′
c
82
E(s
83
, t
132−135
) = 1
′
V
E(t
132−135
, s
83
) = if (c
79
= O) ∨ (c
80
= O)
∨(c
81
= O) ∨ (c
82
= O) ∨ (c
130
= O) then 1
′
V
else 1
′
A
E(s
84
, t
132−135
) = 1
′
V
E(t
132−135
, s
84
) = if (c
80
= O) ∨ (c
81
= O)
then 1
′
V else 1
′
A
E(s
130
, t
132−135
) = 1
′
c
130
E(t
132−135
, s
130
) = 1
′
c
130
E(s
132
, t
132−135
) = 1
′
O E(t
132−135
, s
132
) = 1
′
V
E(s
198
, t
132−135
) = 1
′
V E(t
132−135
, s
198
) = 1
′
O
E(s
200
, t
132−135
) = 1
′
c
200
E(t
132−135
, s
200
) = 1
′
V
E(s
201
, t
132−135
) = 1
′
c
201
E(t
132−135
, s
201
) = 1
′
V
APetriNetModelforanOpenPathMulti-AGVSystem
743

Guard Function
G(t
132−135
) = (d = S) ∧
(c
200
6= O) ∧ (c
201
6= O)
The AGV can move towards south if its direction
is S and if the two cells c
200
and c
201
are not physi-
cally occupied.
3.3.4 Action: Pick-up Pallet/Roll(s)
Arc Expressions
E(l
71
, t
P
132−71
) = m
′
q
E(p
132
, t
P
132−71
) = 1
′
(l, n, d)
E(t
P
132−71
, p
132
) = 1
′
(q, n+ m, d)
Guard Function
G(t
P
132−71
) = (d = W) ∧ (m ≥ 1) ∧
(n = 0)
∧ (l = none) ∧
(m = 1) ∧ (q = P)
∨
(m ≤ 2)
∧ (q = R)
∨
(n = 1) ∧ (l = R) ∧(m = 1)
∧ (q = R)
First of all, the AGV can pick-up loads if its direc-
tion is W, and some loads are present in the storage
lane; moreover, an unloaded AGV can pick-up either
1 pallet or 1 roll or 2 rolls (if available), whereas a
loaded AGV can pick-up 1 roll if its actual load is 1
roll.
4 DEADLOCK ISSUES
Deadlocks may block a multi-AGV system, and such
an issue is indeed critical in open path multi-AGV
systems. In the considered class of systems, some
strategies are taken into account to prevent deadlocks
and to recover from them. However, it is worth not-
ing that this paper is focused on the modelling aspects
of a distribution warehouse; therefore, such strategies
are here only briefly discussed, with no claim of being
exhaustive.
4.1 Deadlock Prevention
The deadlock prevention strategies which are pro-
posed consist, as usually done in this field, in apply-
ing some constraints to the behaviour of the forklift
AGVs, so that the probability that two or more AGVs
incur in a deadlock is reduced. The constraints will
be formalized in the CPN as Generalized Mutual Ex-
clusion Constraints (GMEC) which are implemented
by adding some monitor places whose marking either
prevents or allows the firing of transitions, on the ba-
sis of the actual system state.
In the considered class of distribution warehouses,
in which lanes are wide 3 cells, a first set of con-
straints for deadlock prevention is the following:
• two AGVs at most can travel in the same aisle
(both horizontal and vertical);
• if two AGVs travel in the same aisle:
– they cannot use the central lane;
– they can use the same lane only if they have
identical direction;
• only one AGV can approach the nine cells of a
crossroad at a time.
Such constraints work well when the number of fork-
lift AGVs is limited (for example, 6-8 AGVs in the
distribution warehouse illustrated in Figures 1 and 2).
However, these deadlock prevention strategies are
not sufficient to guarantee the absence of deadlocks,
since, for example, it can happen that an AGV in
an aisle may require, to complete its turn action, the
room of another aisle which is actually occupied by an
AGV that, in turn, needs to go to the room occupied
by the first AGV. For this reason, deadlock recovery
strategies are also considered in the model.
4.2 Deadlock Recovery
The recovery strategy consists in forcing the over-
come of the deadlock situation after a certain amount
of time. This is accomplished by the AGVs which
are assumed to be autonomously able to recover from
a deadlock situation by performing some specific ac-
tions; when, for example, an AGV encounters another
AGV and a deadlock occurs (because each of the two
AGVs has to go to the room occupied by the other
one), the two AGVs stop their nominal movements
and perform some specific actions which allow them
to swap their position, thus overcoming the deadlock
situation. Such actions are carried out safely, being
the AGVs equipped with lasers to detect obstacles or
other AGVs.
This capability of AGVs is modelled into the CPN
by adding some net structures (places, timed transi-
tions, and arcs) which recover deadlocks after the esti-
mated amount of time. In particular, the added transi-
tions are enabled by the possible deadlock markings;
when a deadlock occurs, one of these transitions is en-
abled and thus can fire; the firing drives the CPN to a
new marking in which the deadlock has been solved.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
744

5 CONCLUSIONS
A coloured Petri net model of a distribution ware-
house, in which AGVs move pallets and rolls from the
storage area to the gates of the warehouse, has been
described in this paper. The AGV system is open path
and the proposed CPN model is able to represent the
behaviour of a variable number of AGVs which freely
travel on the system layout. To ensure safety, the pro-
posed CPN model includes colours, guards and arc
expressions which constrain each AGV to be at least
0.8-1 meter distant from any other AGV.
This CPN model has been also used to build
a discrete-event simulator of the distribution ware-
house. Such a simulator, implemented in Extend-
Sim, is currently used to test a scheduling procedure
(based on the solution of some mathematical pro-
gramming problems and a heuristic algorithm) aimed
at assigning the AGVs to the trucks which arrive at the
warehouse and sequencing transportation tasks on the
AGVs. Moreover, the use of the proposed CPN model
for determining the actual paths that the AGVs have
to be follow to minimize travel times and to reduce in-
teractions with other AGVs is currently investigated.
ACKNOWLEDGEMENTS
This work has been supported by A.I.R.O.N.E.
project funded by European Union and Regione Lig-
uria (Italy) under POR-FESR 2007/2013. Special
thanks to the partners of the project: Softeco Sismat
SpA, Sogegross SpA, and Genova Robot Srl.
REFERENCES
Aized, T. (2009). Modelling and performance maximization
of an integrated automated guided vehicle system us-
ing coloured Petri net and response surface methods.
Computers and Industrial Engineering, 57(3):822–
831.
Ajmone Marsan, M., Conte, G., and Balbo, G. (1984). A
class of Generalized Stochastic Petri Nets for the per-
formance evaluation of multiprocessor systems. ACM
Transactions on Computer Systems, 2(2):93–122.
Castillo, I., Reyes, S. A., and Peters, B. A. (2001). Model-
ing and analysis of tandem AGV systems using gener-
alized stochastic Petri nets. Journal of Manufacturing
Systems, 20(4):236–249.
Dotoli, M. and Fanti, M. (2004). Coloured timed Petri net
model for real-time control of automated guided vehi-
cle systems. International Journal of Production Re-
search, 42(9):1787–1814.
Duinkerken, M. B., ter Hoeven, T., and Lodewijks, G.
(2006). Simulating the operational control of free
ranging AGVs. In Perrone, L. F., Wieland, F. P., Liu,
J., Lawson, B. G., Nicol, D. M., and Fujimoto, R. M.,
editors, Proceedings of the 2006 Winter Simulation
Conference, pages 1515–1522.
Holloway, L. E. and Krogh, B. H. (1990). Synthesis of feed-
back control logic for a class of controlled Petri nets.
IEEE Transactions on Automatic Control, 35(5):514–
523.
Hsieh, S. (1998). Synthesis of AGVS by coloured-timed
Petri nets. International Journal of Computer Inte-
grated Manufacturing, 11(4):334–346.
Hsieh, S. and Chen, Y.-F. (1999). AgvSimNet: A
Petri-net-based AGVS simulation system. Interna-
tional Journal of Advanced Manufacturing Technol-
ogy, 15(11):851–861.
Jensen, K. and Kristensen, L. M. (2009). Coloured Petri
Nets. Springer.
Le-Ahn, T. and De Koster, M. B. M. (2006). A review of de-
sign and control of automated guided vehicle systems.
European Journal of Operational Research, 171:1–
23.
Lee, D. Y. and DiCesare, F. (1994). Integrated schedul-
ing of flexible manufacturing systems employing au-
tomated guided vehicles. IEEE Transactions on In-
dustrial Electronics, 41(6):602–610.
Mart´ınez-Barber´a, H. and Herrero-P´erez, D. (2010). Au-
tonomous navigation of an automated guided vehicle
in industrial environments. Robotics and Computer-
Integrated Manufacturing, 26:296–311.
Murata, T. (1989). Petri Nets: Properties, analysis and ap-
plications. Proceedings of the IEEE, 77(4):541–580.
Nishi, T. and Maeno, R. (2010). Petri net decomposition
approach to optimization of route planning problems
for AGV systems. IEEE Transactions on Automation
Science and Engineering, 7(3):523–537.
Nishi, T. and Tanaka, Y. (2012). Petri net decomposition
approach for dispatching and conflict-free routing of
bidirectional automated guided vehicle systems. IEEE
Transactions on Systems, Man, and Cybernetics Part
A:Systems and Humans, 42(5):1230–1243.
Petri, C. A. (1962). Kommunikation mit Automaten. Bonn:
Institut f¨ur Instrumentelle Mathematik, Schriften des
IIM Nr. 2.
Seelinger, M. and Yoder, J.-D. (2006). Automatic visual
guidance of a forklift engaging a pallet. Robotics and
Autonomous Systems, 54:1026–1038.
Sen, A., Wang, C., Ristic, M., and Besant, C. (1991). The
supervisory system of the imperial college free rang-
ing automated guided vehicle project. In Proceedings
of the 1991 IEEE International Conference on Sys-
tems, Man, and Cybernetics, pages 1017–1022.
Vis, I. F. A. (2006). Survey of research in the design and
control of automated guided vehicle systems. Euro-
pean Journal of Operational Research, 170:677–709.
Wu, N. and Zhou, M. (2005). Modeling and deadlock avoid-
ance of automated manufacturing systems with multi-
ple automated guided vehicles. IEEE Transactions on
Systems, Man, and Cybernetics, Part B: Cybernetics,
35(6):1193–1202.
APetriNetModelforanOpenPathMulti-AGVSystem
745
