
Implementing an Adaptive Higher Level Observer in Trusted Desktop
Grid to Control Norms
Jan Kantert
1
, Hannes Scharf
1
, Sarah Edenhofer
2
, Sven Tomforde
2
,
J
¨
org H
¨
ahner
2
and Christian M
¨
uller-Schloer
1
1
Institute of Systems Engineering, Wilhelm Gottfried Leibniz University Hanover, Appelstr. 4, 30167 Hanover, Germany
2
Lehrstuhl f
¨
ur Organic Computing, Augsburg University, Eichleitnerstr. 30, 86159 Augsburg, Germany
Keywords:
Adaptive Control Loop, Multi-agent-Systems, Trust, Norms, Desktop-grid System.
Abstract:
Grid Computing Systems are examples for open systems with heterogeneous and potentially malicious entities.
Such systems can be controlled by system-wide intelligent control mechanisms working on trust relationships
between these entities. Trust relationships are based on ratings among individual entities and represent system-
wide information. In this paper, we propose to utilise a normative approach for the system-level control loop
working on basis of these trust values. Thereby, a normative approach does not interfere with the entities’
autonomy and handles each system as black box. Implicit rules already existing in the system are turned into
explicit norms – which in turn are becoming mandatory for all entities. This allows the distributed systems to
derive the desired behaviour and cooperate in reaction to disturbed situations such as attacks.
1 INTRODUCTION
Organic Computing (OC) (M
¨
uller-Schloer, 2004)
postulates that the steady growth in complexity of
technical systems demands for a paradigm shift. In-
stead of anticipating all possible system configura-
tions during the design process, a system has been
empowered to adjust itself during runtime – design
time decisions need to be transferred into the system’s
runtime components. This architectural paradigm
shift allows us to engineer systems that can provide
flexible, adaptive, and robust solutions – what we call
“life-like” properties.
Typically, OC systems are characterised by mul-
tiple autonomous and distributed entities - to which
we refer as “agents”. Despite their autonomy, which
we have to take care about maintaining an efficient,
scalable and robust behaviour at system-level, while
simultaneously guaranteeing the openness and auton-
omy. Openness also implies that malicious agents can
participate. Therefore, a trust-metric has been devel-
oped in previous work that serves as a basis to isolate
malicious agents within the overall system (Bernard
et al., 2010).
A Trusted Desktop Grid (TDG) is a perfect exam-
ple of such an open system: Agents provide (com-
puting) resources to calculate (parallelisable) jobs for
other agents and can make use of the available re-
sources of others to achieve a better performance for
their own jobs. Thereby, agents may decide to whom
to assign work and from which agents to accept work.
As such a TDG is an open system by design, mali-
cious agents such as Freeriders (meaning they do not
work for other agents) or Egoists (meaning they re-
turn fake results) may also join the system. In order
to guarantee a stable system performance and main-
tain a potential benefit for fair users, these malicious
agents have to be handled as attackers and therefore
become isolated.
The isolation in such an open system is done using
trust values. Therefore, agents rate each other based
on their experiences in terms of reliability and trust-
worthiness. The corresponding trust values are taken
into account when deciding about acceptance of work
or the assignment of work to others. This paper intro-
duces a novel approach to convert the internal rules
of agents (i.e. those leading to trust ratings) into ex-
plicit norms. The basic idea is that agents should be-
come aware of how their desired behaviour is. Con-
sequently, they can learn to act in accordance with
the overall system goal although they do not have this
goal function given in their design. A second major
benefit of this approach is that norms can be instanti-
ated in case of disturbed situations, where the normal
288
Kantert J., Scharf H., Edenhofer S., Tomforde S., Hähner J. and Müller-Schloer C..
Implementing an Adaptive Higher Level Observer in Trusted Desktop Grid to Control Norms.
DOI: 10.5220/0005057902880295
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 288-295
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

trust-based cooperation system reaches its limitations.
As a result, a change of norms can adapt the overall
system to a dynamically changing environment.
The remainder of this paper is organised as fol-
lows: Section 2 explains the application scenario. Af-
terwards, Section 3 introduces our adaptive control
loop to control norms in such a self-organised OC
system. Section 4 describes the challenges to observe
the system state in this application scenario. Based on
this system model, Section 5 evaluates different met-
rics in simulation. Finally, Section 6 summarises the
paper and gives an outlook to future work.
2 TRUSTED DESKTOP GRID
In this work, we analyse how to deal with open dis-
tributed systems. To understand such systems, we use
multi-agent systems and model nodes of the system
as agents. Our application scenario is an open dis-
tributed Desktop Grid System. We want participating
agents to cooperate to gain an advantage. Every agent
works for a user and periodically gets a job, which
contains multiple parallelisable work units. Its goal
is to get all work units processed as fast as possible
by requesting other agents to work for it. The perfor-
mance is measured by the speedup:
speedup =
time
sel f
time
distributed
(1)
In general, agents behave selfishly and only cooperate
if they can expect an advantage. They have to decide
which agent they want to give their work to and for
which agents they want to work.
Since we consider an open system, agents are au-
tonomous and can join or leave at any time. If no co-
operation partners can be found, agents need to calcu-
late their own work units and achieve a speedup value
equal to one. We do not control the agent implemen-
tation, so they may be uncooperative or even mali-
cious and there can not be any assumption of benevo-
lence. Such a system is vulnerable to different kinds
of attacks. A Freerider can simply refuse to work for
other agents and gain an advantage at the expense of
cooperative agents.
The global goal is to enable agents, which act
according to the system rules, to achieve a good
speedup. We measure the global goal either by the av-
erage speedup of the well-behaving agents or by the
amount of cooperation (eq. 2) combined with the av-
erage submit-to-work-ratio of all agents (eq. 3).
cooperation =
n
∑
i=1
n
∑
j=1
ReturnWork(A
i
, A
j
) (2)
f airness =
n
∑
i=1
min(submit
i
− work
i
) (3)
To overcome the problems of an open system, we
introduced a trust metric (Klejnowski et al., 2010).
Every agent gets ratings for every action it takes. This
allows us to make an assumption about the general be-
haviour of an agent based on its previous actions (Kle-
jnowski et al., 2010). In our system, we give agents
a good rating if they work for other agents and a bad
rating if they reject or cancel work requests. As a re-
sult, we can isolate malevolent agents and maintain a
good system utility in most cases. We call this system
a Trusted Desktop Grid (TDG) (Bernard et al., 2010).
We consider the following agent types in our sys-
tem:
• Adaptive Agents - These agents are cooperative.
They work for other agents who have good repu-
tation in the system. How high the reputation has
to be generally depends on the estimated current
system load and how much the queue of the agent
is filled up.
• Freerider - Such agents do not work for other
agents and reject all work requests. However, they
ask other agents to work for them. This increases
overall system load and decreases the utility for
well-behaving agents.
• Egoists - These agents only pretend to work for
other agents. They accept all work requests but
return fake results to other agents, which wastes
the time of other agents. If results are not vali-
dated, this may lead to wrong results, otherwise,
it lowers the utility of the system.
• Cunning Agents - These agents behave well in the
beginning but may change their behaviour later.
Periodically, randomly, or under certain condi-
tions they behave like Freeriders or Egoists. This
is hard to detect and may lower the overall system
utility.
We simulate an attack by adding new malicious
agents to the system at startup or during runtime.
Since these malicious agents distribute their work, the
speedup for well-behaving agents decreases. How-
ever, those agents get bad ratings such that their rep-
utation in the system is reduced. At this point, other
agents stop to cooperate with these isolated agents.
We try to minimise the impact and duration of these
disturbances, but they still decrease the system utility
(Bernard et al., 2011).
One special problem of attacks by Freeriders is
that they create a large amount of bad ratings in
the system. In general, it is easy for agents to
detect Freeriders, because they do not accept any
work. When agents detect a Freerider, they refuse
ImplementinganAdaptiveHigherLevelObserverinTrustedDesktopGridtoControlNorms
289
Norm Manager
Agent A
Agent B
Agent C
Norm set
Agent E
Agent D
Observationmodel
Change norms
Distribute
norms
Collect data
on agents
Observer Controller
Situation
Description
Detect
situation
SuOC
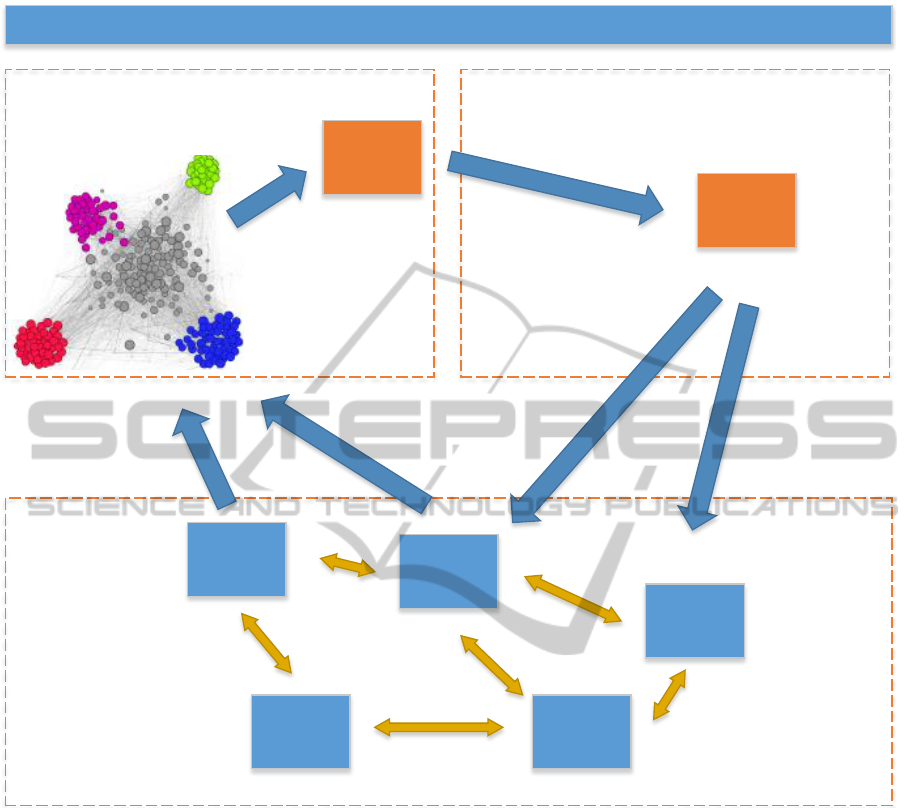
Figure 1: System Overview.
to work for this agent. But the Freerider still tries
to distribute its work and gives bad ratings to other
agents for not cooperating. This leads to a Trust
Breakdown. Even the reputation of well-behaving
agents decreases. It takes usually relatively long time
to restore normal system behaviour by isolating all
Freeriders (Stegh
¨
ofer et al., 2010).
To prevent problems like Trust Breakdowns and
increase the robustness of the system, we introduced
an agent organisation called explicit Trusted Com-
munities (eTCs) (Bernard et al., 2011). When a
group of agents notices that they mutually trust each
other, they can initialise to form an eTC. They elect a
leader called the Trusted Community Manager, which
performs maintenance tasks inside the community.
Agents can then reduce security measurements like
replication of work units and are able to gain a bet-
ter speedup. Members of an eTC can easier resist at-
tacks, because they can always just cooperate inside
the community and ignore the environment.
3 ADAPTIVE CONTROL LOOP
FOR NORM MANAGER IN TDG
In our Trusted Desktop Grid, different attacks by
malevolent agents can occur. We implemented var-
ious counter and security measurements to maintain
a good utility to well-behaving agents. However,
most of these measurements come with some attached
costs. Although, we do not benefit from those mech-
anisms under normal operations. They are essential
under attack or at least make recovery from attacks
significantly faster.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
290
Additionally, we can configure our reputation sys-
tem and change the effect of ratings. This may in-
crease or decrease robustness, but it also influences
how fast new agents are integrated into the system.
Giving larger incentives leads to faster system start-
up and better speedup when well-behaving agents join
the system. However, is gets easier to exploit the sys-
tem for malevolent agents.
In the TDG, a variety of different parameters exist
which influence the system behaviour. They must be
set before system start. For example, they enable or
disable security measures or change the influence of
a rating to the reputation system. Some settings result
in a better speedup when no attacks occur, but lead
to a higher impact on the performance in case of the
system being under attack. There is no global optimal
value for most of these scenarios. The ideal value or
setting depends on the current situation.
To get the best overall performance, we need to
change these parameters and settings during runtime
according to the current situation. However, we can-
not detect global system states like Trust Breakdown
from a local viewpoint of an agent. It is also not pos-
sible to influence agents directly since they are au-
tonomous. There needs to be a higher-level instance
which can detect the current system state and a way
to indirectly influence all agents in the system.
In Figure 1, we show our concept of the
Norm Manager, which uses the common Observer-
Controller pattern (Tomforde et al., 2011). In the
next sections, we describe Observer, Controller and
the System under Observation and Control (SuOC).
3.1 Observer
To detect the current system state, the controller mon-
itors work relations of all agents. For this purpose it
creates a work graph with agents as nodes and edges
between agents which have cooperated in the mon-
itored period. The intensity of the cooperation be-
tween two agents determines the weight of the edge
connecting them. Additionally, the controller cre-
ates a trust graph with agents as nodes and trust re-
lations as edges. Trust relations between agents can
be obtained from the reputation system (Kantert et al.,
2013).
Afterwards, we can calculate some common graph
metrics for every node. Using statistics, the global
system state can be rated. Based on these metrics, we
can form clusters and find groups of similar agents.
By further classifying these groups, we can achieve
an even better understanding about potentially attacks
happening. In the end, the observer is able to tell
when the system is under attack, tell the type of the
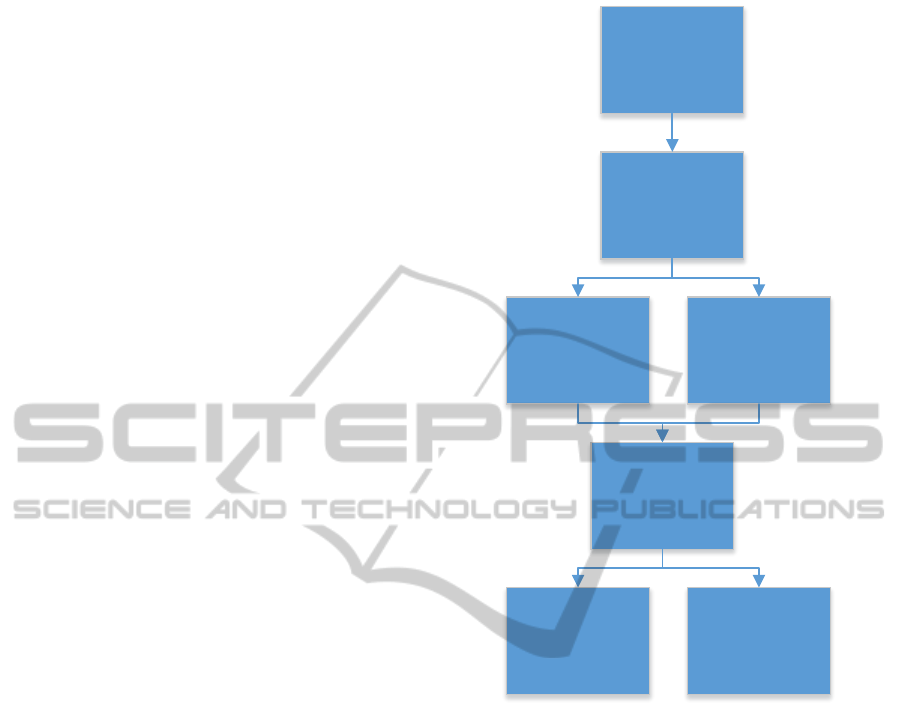
Build Trust Graph
Apply metrics
Find groups Find cluster
Statistics
Compare to
historic values
Compare to
thresholds
Figure 2: Workflow in observer component.
attacks and tell how serve the attack is. There will
also be an estimation about the accuracy of these in-
formations.
3.2 Controller
Based on the information obtained by the observer,
the controller decides whether the system norms need
to be changed. Norms cannot directly influence
agents but modify their actions. To be more spe-
cific, norms can impose sanctions or offer incentives
to actions. To defend against attacks, we can increase
sanctions for certain actions under some conditions
or we can allow agents to perform security measures,
which would lead to sanctions otherwise (Balke et al.,
2013).
3.3 SuOC
Agents in the TDG need to be able to understand the
currently valid norms, which enables them to con-
sider sanctions and incentives in their decision mak-
ImplementinganAdaptiveHigherLevelObserverinTrustedDesktopGridtoControlNorms
291

ing. This allows them to follow short or long-term
strategies based on these norms. Since the agents are
autonomous and they are free to obey or not, the sys-
tem still needs to enforce the sanctions and give in-
centives to agents (Urzic
˘
a and Cristian, 2013).
The complete control loop implemented by the
Observer-Controller component helps to mitigate ef-
fects of attacks to the TDG and allows a better satis-
faction of the system goals. Thereby, it defines an in-
telligent control mechanism working on system-level.
However, if the additional NM fails, the system itself
is still operational and can continue to run (this refers
to the desired OC characteristic of non-critical com-
plexity (Schmeck et al., 2010)). When the NM is re-
covered, it can start to optimise the system again.
3.4 Summary
This adaptive control loop allows us to properly con-
figure our system to defend against attacks and per-
form as well as possible. Most attacks can also be
fought off by the agents and the reputation system
alone, but this takes more time and leads to worse
overall performance. By using security measures only
when needed and optimised norms, the system can
perform better on average. It can adapt to known and
unknown situations, depending on the observations
made by the observer. In the next chapter we present
our observer, which needs to detect the current state
of the system.
4 OBSERVING THE SYSTEM
Since we cannot see the internals or implementation
of agents, we need to observe them from the outside.
We could monitor interactions between agents, but
this may become a bottleneck in larger systems. How-
ever, it is easy to monitor the actions indirectly: We
can observe the reputation system and use the ratings,
which agents give their partners after every interac-
tion.
In Figure 2, we show our general concept of the
observer. First, we build a graph of the trust relations
between agents. Afterwards, we apply graph metrics
to be able to find groups or clusters of similar agents
in the next step. We run statistics on every cluster
found and compare them to historic or threshold val-
ues.
4.1 Trust Graph
To analyse the system state, we build a trust graph.
We add all agents as nodes. Afterwards, we fetch
Figure 3: Simple Trust Graph in TDG layouted with Force
Algorithm.
the trust relationships between agents from the rep-
utation system and add them as edges to the graph.
The weight of the edge represents the amount of trust
between the connected agents.
Figure 3 illustrates an exemplary trust graph from
one TDG scenario. It has been layouted using a Force
Algorithm. In the centre of the graph, agents trust
each other and work together. We call this the core
of the network. All isolated agents are layouted at
the border of the graph and have very weak connec-
tions. The graph is a complete graph, because there
is a trust relation between every pair of agents. How-
ever, we omit all edges below a certain weight to im-
prove performance. This also allows us to use algo-
rithms which ignore the edge weight.
4.1.1 Directed
In general, trust has not to be mutual. A Freerider F
may trust an Adaptive Agent A, because A worked for
F. But most certainly, A does not trust F, because F re-
fused all work requests of A. We end in a graph with
two edges between every pair of nodes. However, af-
ter filtering out weak edges, there may be zero or only
one edge left.
4.1.2 Undirected
Some algorithms can only work on undirected graphs.
Since trust is not mutual, we need to unify both edges.
There are different ways to do this:
• Use maximum of weights
• Use sum of weights
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
292

Table 1: Attack size calculated by system size vs attack percentage.
attack % 1% 5% 10% 25% 50% 100% 150% 200%
system size
50 1 3 5 13 25 50 75 100
100 1 5 10 25 50 100 150 200
250 3 13 25 63 125 250 375 500
500 5 25 50 125 250 500 750 1.000
• Use minimum of weights
We decided to use the minimum of weights, because
only two well-behaving agents mutually trust each
other. This may also happen during collusion attacks
between malevolent agents.
4.2 Metrics
There are plenty of graph metrics in literature. We
selected a subset based on (Wasserman, 1994).
4.2.1 Directed
• Prestige - This metric counts the incoming edges
for a node.
• Actor Centrality - This metric counts the outgo-
ing edges for a node.
• HITS - Hyperlink-Induced Topic Search algo-
rithm (Kleinberg, 1999). It determines Hubs and
Authorities to categorise all nodes in a graph.
4.2.2 Undirected
• Degree Centrality - This metric counts all edges
for a node
• Cluster Coefficient - A metric to measure the de-
gree to which nodes tend to form a cluster.
4.3 Clustering
In this paper, we assume that we can perfectly cluster
groups to rate our metrics. Evaluating different clus-
tering algorithms is part of future work. In Figure 3,
it can be seen that a Force Algorithm can be used. In
our evaluation, we use prior knowledge about agent
groups.
5 EVALUATION
In this section, we present some of our results. We
show one exemplary experiment for every metric. In
our evaluation, we performed several experiments for
different system and attack sizes, as shown in Table
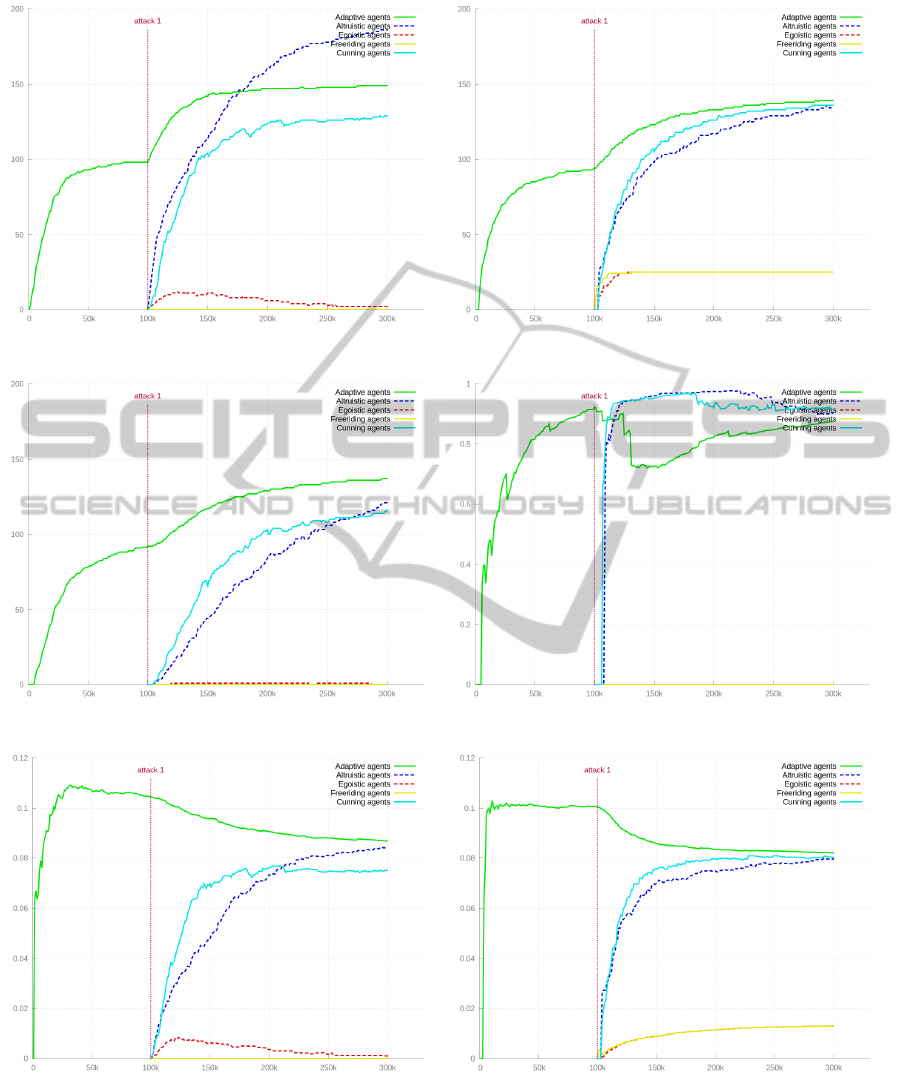
1. The system from the shown images consist of 100
agents and an attack percentage of 50%, which means
50 agents enter the system at simulation tick 100k, re-
sulting in a system of 150 agents. We also did sepa-
rate evaluations for every agent group, which are not
shown here.
5.1 Prestige
In Figure 4(a), the Prestige for all agent breeds is
shown. It is possible to distinguish between coop-
erative and non-cooperative agents using this metric:
Adaptive Agents, Altruists and Cunning Agents gain a
high value. However, on a long term Cunning Agents
stay below Adaptive Agents. Altruists grow higher
than Adaptive Agents. Egoists and Freerider both stay
at a very low value. Egoists gain some Prestige at the
beginning but loose it again.
5.2 Actor Centrality
Actor Centrality (see Figure 4(b)) behaves similar to
Prestige. Freerider and Egoists stay at a low value.
However, they would stayed at zero, if there were
no Altruists in the system (not shown in the image).
Adaptive Agents gain a high value. Cunning Agents
and Altruists stay a little lower than Adaptive Agents.
5.3 Degree Centrality
In Figure 4(c), we show the Degree Centrality of the
agent groups. This metric can be used to clearly iden-
tify non-cooperative agents (Freeriders and Egoists).
Adaptive Agents gain a very high value. Cunning
Agents stay significantly below in a long term. Al-
truists are between the previous two.
5.4 Cluster Coefficient
Cunning Agents and Altruists gain a very high Cluster
Coefficient value (see Figure 4(d)). Adaptive Agents
stay below. Non-cooperative agents have a value of
zero again.
5.5 Authorities
Authorities calculated by the HITS Algorithm are a
good metric to distinguish Adaptive Agents and Altru-
ImplementinganAdaptiveHigherLevelObserverinTrustedDesktopGridtoControlNorms
293
(a) Prestige vs Time (b) Actor Centrality vs Time
(c) Degree Centrality vs Time (d) Cluster Coefficient vs Time
(e) Authorities vs Time (f) Hubs vs Time
Figure 4: Combined simulation results.
ists from Cunning Agents. Egoists gain a little more
Authority at the beginning but start to loose it after-
wards. Freerider stay at zero all the time (see Figure
4(e)).
5.6 Hubs
Hubs only allow us to categorise agents into a coop-
erative and a non-cooperative group. Similar to Ac-
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
294

tor Centrality, Egoists and Freerider only get a value
higher than zero if Altruists are in the system. All
cooperative agents reach a high value and stay very
close (see Figure 4(f)).
6 CONCLUSION AND FUTURE
WORK
Using our metrics, we can reliably identify different
types in our system. Non-cooperative agents such as
Freerider and Egoists are very easy to detect. Altru-
ists make detection of other agent types harder, be-
cause they work for everybody. However, we can still
detect all other groups. Cunning Agents are also hard
to detect, because they behave similar to Adaptive
Agents. Still, we can identify them on the long-run
using Prestige and Authorities.
Our next step is to find good clustering algorithms
to find groups of similar agents. Force algorithms as
seen in Figure 3 look promising. However, by using
multiple clustering metrics, the results should be even
better.
ACKNOWLEDGEMENTS
This research is funded by the research unit “OC-
Trust” (FOR 1085) of the German Research Founda-
tion (DFG).
REFERENCES
Balke, T. et al. (2013). Norms in MAS: Definitions and
Related Concepts. In Normative Multi-Agent Sys-
tems, volume 4 of Dagstuhl Follow-Ups, pages 1–31.
Schloss Dagstuhl–Leibniz-Zentrum fuer Informatik.
Bernard, Y., Klejnowski, L., Cakar, E., Hahner, J., and
M
¨
uller-Schloer, C. (2011). Efficiency and Robust-
ness Using Trusted Communities in a Trusted Desktop
Grid. In Proc. of SASO Workshops (SASOW).
Bernard, Y., Klejnowski, L., H
¨
ahner, J., and M
¨
uller-Schloer,
C. (2010). Towards Trust in Desktop Grid Systems.
Proc. of IEEE CCGrid, pages 637–642.
Kantert, J., Bernard, Y., Klejnowski, L., and M
¨
uller-
Schloer, C. (2013). Interactive Graph View of Explicit
Trusted Communities in an Open Trusted Desktop
Grid System. In Proc. of SASO Workshops (SASOW),
pages 13–14.
Kleinberg, J. M. (1999). Authoritative sources in a hy-
perlinked environment. Journal of the ACM (JACM),
46(5):604–632.
Klejnowski, L., Bernard, Y., H
¨
ahner, J., and M
¨
uller-Schloer,
C. (2010). An Architecture for Trust-Adaptive
Agents. In Proc. of SASO Workshops (SASOW), pages
178–183.
M
¨
uller-Schloer, C. (2004). Organic Computing: On the
Feasibility of Controlled Emergence. In Proc. of
CODES and ISSS’04, pages 2–5. ACM Press.
Schmeck, H., M
¨
uller-Schloer, C., C¸ akar, E., Mnif, M., and
Richter, U. (2010). Adaptivity and Self-organization
in Organic Computing Systems. ACM Trans. on Aut.
and Adap. Sys., 5(3):1–32.
Stegh
¨
ofer, J.-P., Kiefhaber, R., Leichtenstern, K., Bernard,
Y., Klejnowski, L., Reif, W., Ungerer, T., Andr
´
e, E.,
H
¨
ahner, J., and M
¨
uller-Schloer, C. (2010). Trustwor-
thy Organic Computing Systems: Challenges and Per-
spectives. In Proc. of ATC 2010. Springer.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J., Mnif,
M., M
¨
uller-Schloer, C., Richter, U., and Schmeck, H.
(2011). Observation and Control of Organic Systems.
In Organic Computing - A Paradigm Shift for Complex
Systems, pages 325 – 338. Birkh
¨
auser Verlag.
Urzic
˘
a, A. and Cristian, G. (2013). Policy-Based Instan-
tiation of Norms in MAS. In Fortino, G., Badica,
C., Malgeri, M., and Unland, R., editors, Intelligent
Distributed Computing VI, volume 446 of Studies in
Computational Intelligence, pages 287–296. Springer
Berlin Heidelberg.
Wasserman, S. (1994). Social network analysis: Methods
and applications, volume 8. Cambridge university
press.
ImplementinganAdaptiveHigherLevelObserverinTrustedDesktopGridtoControlNorms
295
