
Genetic Programming Applied to Biped Locomotion Control with
Sensory Information
C´esar Ferreira
1
, Pedro Silva
1
, Jo˜ao Andr´e
1
, Cristina P. Santos
1
and Lino Costa
2
1
Industrial Electronic Department, University of Minho, Azurem Campus, Guimar˜aes, Portugal
2
Production Systems Department, University of Minho, Gualtar Campus, Braga, Portugal
Keywords:
Biped Locomotion, CPG (Central Pattern Generator), Sensory Information.
Abstract:
Generating biped locomotion in robotic platforms is hard. It has to deal with the complexity of the tasks which
requires the synchronization of several joints, while monitoring stability. Further, it is also expected to deal
with the great heterogeneity of existing platforms. The generation of adaptable locomotion further increases
the complexity of the task.
In this paper, Genetic Programming (GP) is used as an automatic search method for motion primitives of
a biped robot, that optimizes a given criterion. It does so by exploring and exploiting the capabilities and
particularities of the platform.
In order to increase the adaptability of the achieved solutions, feedback pathways were directly included into
the evolutionary process through sensory inputs.
1 INTRODUCTION
There is an increasing interest in building autonomous
systems to aid humans performing tasks in a wide
variety of situations. Ranging from space and deep
ocean exploration, or rescue missions in hazardous
environments, to in everyday tasks, such as cleaning
the house or taking care of the elderly. In most of
these cases, legged locomotion may provide for an
advantage over wheeled or tracked robots. It offers
a higher level of flexibility required in a wide vari-
ety of terrains and the ability to deal with harsher ter-
rain features, e.g. stairs, obstacles, uneven or irreg-
ular terrain. Particularly, biped locomotion provides
the flexibility to a world shaped for humans. The con-
trol and generation of biped locomotion for the ever
improving biped robots is a very demanding task, ad-
dressing complex problems as the generation of the
movements and coordination between many degrees
of freedom, balancing, perception and planning, and
disturbance rejection.
Typical solutions to the problem of biped locomo-
tion make extensive use of the knowledge of the robot
and environment. Generally a plan of the path and
foot placement sequence is determined, then the re-
quired motions are computed using the robot’s kine-
matical model, respecting determined constraints es-
tablished through some stability criterion, as the pop-
ular Zero-Moment Point (Vukobratovi´c and Borovac,
2004). However, such approach requires a good
perception of the environment which may hamper
the general application to different dynamic environ-
ments.
Alternatively to these typical solutions, bio-
inspired approaches have been researched and pro-
posed with quite successful results. One of these ap-
proaches uses the concept of Central Pattern Genera-
tors (CPGs), exploiting the interesting characteristics
of intraspinal neural networks in vertebrates (Ijspeert,
2008). These generate rhythmic activation for walk-
ing motor patterns. The main characteristic that moti-
vates for the application of CPGs in the generation of
robotic legged locomotion is the ability to adapt and
correct the locomotion by the integration of sensory
feedback pathways (Kim et al., 2011). This provides
the ability for the robots to tackle unexpected dis-
turbances and not completely known environments.
However, there is no established framework for de-
signing CPG solutions and such sensory feedbacks.
Previously, we have proposed a CPG based solu-
tion for biped locomotion (Matos and Santos, 2012).
It combines a small set of motion primitives within
CPGs driven by phase oscillators, producing basic
but very capable biped walking for the DARwIn-OP
humanoid robot. Despite the simplicity of the solu-
tion, the expansion of the repertoire of motion prim-
53
Ferreira C., Silva P., André J., P. Santos C. and Costa L..
Genetic Programming Applied to Biped Locomotion Control with Sensory Information.
DOI: 10.5220/0005062700530062
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 53-62
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

itives to broaden the locomotor behaviors has proven
complex, as well as the design of feedback mecha-
nisms for the adaptation and correction of locomo-
tion. Some authors tackle this problem through im-
itation and learning from demonstration (Nakanishi
et al., 2004), optimization of parameterized trajecto-
ries (Kim et al., 2009) or reinforcementlearning (Sug-
imoto and Morimoto, 2011). In this work, we take a
distinct approach, where the goal is to apply Genetic
Programming to the automatic exploration of: 1) the
motion primitives within the CPG, and 2) the integra-
tion of sensory inputs into feedback mechanisms for
the adaptability to the environment.
Evolutionary Computation (EC) algorithms rely
on the concept of Darwin’s evolution theory to find
optimized solutions for a target problem, such as
Genetic Algorithms (GA) and Genetic Programming
(GP). The former considers a control policy whose
configuration is evolved as a string of chromosomes
- configuration parameters for a target problem. The
latter evolves a complete control program for the task
at hand. These methods use a fitness function that
evaluates the candidate solutions, or individuals, and
whose value is used as quality measure for a set of
evolutionary operators (selection, crossover and mu-
tation).
Candidate solutions in GP, or individuals, can
fully describe the solution to the target problem, not
requiring any a-priori structure. Therefore, although
the complexity of the search space is increased, it is
expected to generate more adequate solutions to a par-
ticular problem.
GP has proven to be useful in the generation of
locomotion for very different types of robotic plat-
forms, thus showing its efficiency in finding solutions
for problems with a high levelof complexity. In (Gritz
and Hahn, 1997) a generic controller for an animated
physically plausible 3D character was created: an ar-
ticulated lamp. In (Tanev et al., 2005) a locomotion
controller for an articulated, snake like robot was cre-
ated. GP was also employed to generate a legged lo-
comotion controller for a quadruped robot in (Ander-
sson et al., 2000).
This method has also been applied in the genera-
tion of biped locomotion. In (Ok et al., 2001), GP was
applied in the automatic generation of feedback neu-
ral networks for the control of a simulated 3D biped
model with 32 muscles that controlled rigid segments
of the legs, body and arms. The model was able to
generate locomotion during only four steps. In (Ok
and Kim, 2005), these results were improved by ap-
plying an enhanced adaptive mutation operator that
reduced the search space and improved the evolution
results, increasing the generated steps to 10. Although
this work yielded interesting results, it is applied on a
very specific model, which physical and mechanical
properties do not fit common biped robotic platforms.
Other works address the generation of controllers
to robotic platforms through the use of GP. In (Wolff
and Wahde, 2007), Linear Genetic Programming
(LGP) was used to generate a locomotion controller
with feedback pathways, for a robust and anthropo-
morphic biped robot model. The model is simulated
butphysically plausible. There was no a-priori knowl-
edge about the mechanical or physical properties of
the body. Instead, the evolution uses feedback from
several sensor modalities (e.g. joints and several ac-
celerometers in the body and in the legs) to success-
fully achieve biped locomotion.
The work proposed in (Wolff and Nordin, 2003)
presents the generation of robot legged locomotion in
flat ground using LGP. A primary solution generated
in simulation would be passed on to a physical robot.
However, the achieved solution could not be executed
in the physical platform.
We intend to use GP to automatically search the
solution landscape and find solutions that rely on a
set of motion primitives. We also explore the use of
feedback pathways as a means to enable adaptation
to the environment features, particularly to adapt the
locomotion to walk up and down slopes in the en-
vironment. We are particularly interested in the im-
pact of sensory inclusion in the robot behavior herein
assessed considering Center of Mass (CoM) trajec-
tory. This provides for an understanding of how
feedback enhanced the locomotion skills of a biped
robot. Results demonstrate the smooth locomotion
achieved by the proposed GP mechanism and the
added adaptability to the environment, provided by
the inclusion of feedback pathways directly onto the
controller. Therefore, movement is generated in en-
trainment with the environment.
The paper is organized as follows. The following
section presents the locomotion model used to con-
trol the target platform. Then in section 3 the GP evo-
lution mechanism is presented, where the individu-
als for the current evolution process and the evolution
configuration are defined. Lastly, the results are pre-
sented in section 4, followed by a discussion in sec-
tion 5 and conclusions and future work in section 6.
2 BIPED LOCOMOTION MODEL
The basis of the locomotion controller used in this
work was previously presented in (Matos and Santos,
2012), where we proposed a Central Pattern Gener-
ator (CPG) integrated with local sensory feedback,
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
54

capable of generating bipedal locomotor behaviors,
such as walking forward/backwards and turning.
The proposed CPG controls a single leg, divided
in rhythmic and unit motion pattern generators. The
use of a phase oscillator as a rhythmic generator al-
lowed for a simple contralateral coupling between the
left and right CPGs, maintaining the correct coordina-
tion between the generated locomotor trajectories in
both legs by producing each a driving rhythmic signal
φ
i
in strict alternation (i for left/right leg).
Motion pattern generators receive this rhythmic
input and produce the corresponding joint trajectory,
z, in a synergistic approach of modular motion prim-
itives encoded as a set of non-linear dynamical equa-
tions with well defined attractor dynamics, similarly
to other works (McSharry et al., 2003; Nakanishi
et al., 2004; Ijspeert et al., 2002). Basic parameterized
motion primitives, e.g. sine and bell-shaped motions
(implemented as Gaussians), were considered.
The joint angle value z
i, j
, for leg i and joint j, is
given by
˙z
i, j
= −α(z
i, j
− O
i, j
) +
∑
f
m
j
z
i, j
,φ
i
,
˙
φ
i
. (1)
The final motor program in a single joint re-
sults from the sum of rhythmic motion primitives f
m
j
around a center point O
i, j
. α is a relaxation parameter
for the offset. j specifies the joint: hip roll (hRoll), hip
yaw (hYaw), hip pitch (hPitch), knee (kPitch), ankle
roll (aRoll) and ankle pitch (aPitch); and i specifies
the left or right leg.
This approach, despite simplistic, allowed a small
humanoid DARwIn-OP robot to perform stable loco-
motion (Matos and Santos, 2012). The simplicity of
the approach is also its weakness. For instance, if
more complex motor programs are desired we are un-
aware of which motion primitives f
m
j
should be em-
ployed. This problem motivates us to use automatic
optimization in the present work, where the motor
program is given as a result from GP evolution
˙z
i, j
= E
i, j
z
i, j
,φ
i
,
˙
φ
i
. (2)
The biped robot DARwIn-OP has 6 joints per leg,
hip roll, pitch and yaw, knee pitch and ankle pitch
and roll. Since the motor programs are valid for both
legs, and because we use the same motor programs of
the hip and knee joints in the ankle joints to maintain
the feet parallel to the ground at all times, we only
perform the search in four motor programs for the hip
roll, pitch and yaw, and for the knee pitch. This is
depicted in Fig. 1.
CPG
Motor
Program
HipYaw
Ankle
Roll
Ankle
Ptch
Motor
Program
Hip Roll
Motor
Program
Hip
Pitch
Motor
Program
Knee
Pitch
Figure 1: Schema for the control DarwinOP using only 4
motor programs (grey dark circles).
3 EVOLUTION
CONFIGURATION
The evolution process aims to optimize the locomo-
tion of a given platform, in this case the DarwinOP
biped robot. Different platforms could havebeen used
instead, under adequate configuration. Additionally,
it is also desirable to provide adaptation to the loco-
motion through feedback pathways. Therefore, two
specific goals are defined: 1) to improve the locomo-
tion efficiency for the target platform comparatively
to an initial hand-tuned solution by exploring differ-
ent motion primitives for each joint; and 2) to explore
the search and optimization of feedback pathways to
achieve adaptability to changing features of the envi-
ronment.
Two different controllers will be proposed in or-
der to address each of these goals: controller 1 and
controller 2. Controller 1 intends to generate biped
locomotion to a target platform, and evolves in open-
loop without including any sensory information from
the environment. Controller 2 intends to generate
biped locomotion to the same target platform but in a
closed-loop fashion. Therefore, sensory information
was directly included into the movement generation
in order to achieve adaptability to the environment.
This last controller should therefore provide for bet-
ter results when adaptability is required.
3.1 Individuals
Locomotion is generated according to four mathemat-
ical expressions E, eq. 2. Each individual, a candi-
date solution for the locomotion problem, is therefore
composed by 4 chromosomes that correspond to the
GeneticProgrammingAppliedtoBipedLocomotionControlwithSensoryInformation
55

four E equations, that will drive the robot joints, as
depicted in Fig. 1.
Each chromosome is a mathematical expression
under the form of a tree. The nodes of the tree are
defined by functions whose branches correspond to
the inputs, and that can be either other nodes or just
leaves. The leaves are variables, constants and sen-
sory inputs, that will input the lower level tree nodes.
The function set is specified as:
S
F
= {sin,cos,∗,+, − , /,exp,sigmoid,step}. (3)
It is assumed that this set is sufficient to cre-
ate rhythmic motions for the achievement of the
biped locomotion pattern. These functions were used
in (Matos and Santos, 2012) to implement the ba-
sic parameterized motions primitives, sine and bell-
shaped motions, to achieve biped locomotion.
Further, the functions sigmoid and step were in-
cluded as relevant functions for the control process.
The sigmoid function was defined as follows:
The step function according to :
sigmoid(x) = 2
1
1+ exp
−x5
− 1 (4)
Both functions were though as interesting func-
tions to enable the interaction between functions and
between function and inputs (e.g. variables or sensory
inputs).
step(x) =
1 ifx > 0,
−1 ifx < 0.
0 otherwise,
(5)
The terminal set is defined specifically for each of
the two proposed controllers.
3.1.1 Controller 1
For this controller the terminal set is defined as fol-
lows:
S
T
=
n
φ,
˙
φ,z, −
π
6
,−
π
4
,−
π
3
,−
π
2
,−π,
π
6
,
π
4
,
π
3
,
π
2
,π,[−60,60],0
o
,
(6)
where φ,
˙
φ and z are the controller inputs as defined
in section 2. The constants were chosen as angles and
real values thought to be relevant for the purpose. Al-
though the angles, such as
π
2
, are within the defined
interval of real numbers, [−60,60], their specification
in the terminal set, increases the probability of being
chosen. This is important for the locomotion genera-
tion due to their adequacyto define phase relations be-
tween the different joints. The real interval, [−60, 60],
was chosen as possible values for the amplitudes of
the different movements.
3.1.2 Controller 2
In order to be able to seek for adaptation to the en-
vironment such that locomotion is generated accord-
ingly, sensory feedback can be directly included in the
search space.
In this work, sensory feedback is provided by a
three axis accelerometer, a
x
, a
y
and a
z
; a three axis
gyroscope, g
x
, g
y
and g
z
; and the touch sensors of
each leg, t
l
and t
r
. Both the accelerometer and the
gyroscope values are normalized and then fed to the
controllers. The touch sensors indicate if a given leg
is in contact with the groundor not, yielding a boolean
value indicating the state.
The terminal set for evolutions is thus defined as
follows:
S
T
f
= S
T
∪
a
x
,a
y
,a
z
,g
x
,g
y
,g
z
,t
l
,t
r
.
(7)
3.2 Evaluation
The criterion used in the evaluation of the individuals
is the forward distance traveled by the robot during a
certain amount of time. Besides this, the fitness takes
into account different and penalizable results as fol-
lows:
f =
1
N
N
∑
i=1
h
∆
(i)
z
− |∆
(i)
x
| − c
(i)
fall
v
(i)
fall
i
− c
nan
v
nan
, (8)
where ∆
z
is the forward displacement and ∆
x
is the
lateral displacement. The lateral displacement is re-
moved from the forward displacement in order to
compensate for possible asymmetric sliding of the
platform. v
fall
and v
nan
are flags that indicate if the
controller caused the robot to fall, or produced impos-
sible joint positions, respectively. The constants c
fall
and c
nan
, are the penalizing coefficients for the corre-
sponding situations. The undesirable situations of the
robot falling or attempting an impossible joint posi-
tion, as well as the lateral displacement, ∆
x
, penalize
the corresponding individual’s fitness.
The evaluation process of each individual is di-
vided into N stages. i indicates the stage. Each stage
yields different displacements and possible falls that
have to be averaged to count for the final fitness.
3.3 Architecture
The evolution process was implemented using the
OpenBeagle Framework, (Gagn´e and Parizeau, 2006)
as shown in Fig. 2. The initial population is generated
with individuals that are evaluated using the Webots
simulator, to guarantee that are feasible solutions, that
is, they do not generate impossible joint positions.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
56

The scenario may vary and yields the fitness values
accordingly. The fitness of each individual is used by
the genetic operators, selection, crossover and muta-
tion, in the process of generating a new population.
The new population is then evaluated and the loop
goes on until the termination criterion is satisfied. In
the present work, the termination criterion is defined
by a maximum number of generations.
Stop
Criteria
Webots
Fitness
Value
Initial Population
New Generation
Optimized Solution
Reached
Not Reached
Population
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
Individual Chromossome
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
...
...
Mutation
Cross Over
Selection
Each
Individual
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
x
×
+
e
φ
10
sin
Each
Population
Population
Population
Population
Figure 2: Evolution architecture. On the left, a new popu-
lation is generated. On the right, the evaluation process in
which each individual is tested in Webots simulator.
The initial population was specified using 10 seed
individuals, as variations of a hand-tuned solution
from our previous work in (Matos and Santos, 2012).
These seed solutions were defined by small variations
in the parameters of eq. 1, whether in the motion
primitives, or in the offsets of the joints (O
i, j
).
The remaining individuals were generated ran-
domly using the ramped Half-and-Half method -
where half the individuals are randomly generated
trees until a variable depth is reached, and the other
half until a variable size is reached. All share the
same structure so that their information will be spread
through the population during the evolution process,
and coupled with different structures to generate nov-
elty and diversity.
Other parameters of the evolution process config-
uration are listed in table 1. The crossover and muta-
tion rates, as well as the selection sizes, were selected
by trial and error, so that the evolution process yields
optimized solutions.
The penalizing coefficient c
nan
= 10, so that the
genetic information that generates impossible joint
positions is quickly discarded by the evolutionarypro-
cess.
The number of stages, N, as well as the penalizing
coefficient, c
fall
, change for the different developed
controllers. Therefore they will be specified in the
text when required.
Table 1: GP evolution parameters.
Parameter Value
Tournament Size 10
Cross over Rate 0.8
Mutation Rate 0.3
Population Size 500
# Generations 100
Max Depth 25
4 RESULTS
This section intends to show the obtained results for
the two developed controllers.
Firstly, we demonstrate the adequacy of both con-
trollers to produce different walking locomotion with
improved performance over the initial hand-tuned
one, according to the specified criteria. Secondly, we
explore the inclusion of sensory feedback pathways
as a means to provide for adaptability and as such
achieve locomotion with better performance when
climbing and descending slopes.
The evaluation of both controllers is performed in
three different scenarios. Flat Ground experiment is
the simplest scenario. Slope Ground experiment is a
scenario in which the robot has to climb or to descend
a sloped ground. Up-Slope and Down-slope Ground
experiment is a scenario in which the same solution
has to cope with up and down slopes.
During the first 10 s of an individual evaluation,
the robot movements are linearly increased from an
initial posture up to the specified values. This pro-
vides for a smooth and stable slow start of the robot’s
locomotion. At the end of each individual evaluation,
the robot is set to its initial position and rotation, such
that initial conditions are equal for the evaluation of
all individuals of all populations.
Results were obtained in an Intel i7-2600k 3.4Ghz
Linux (8 GB of RAM) PC.
4.1 Flat Ground Scenario
In this scenario, the goal of the evolved solutions is
to generate a controller that enables the robot to go
as further as it can, while drifting laterally as little as
possible, during 30 s.
The robot always moves in the same flat ground.
Thus only one stage is considered (N = 1). The fall
penalty factor is set as c
fall
= 1, so that the evolu-
tion process is forced to select individuals that do not
cause the robot to fall, over the ones that do.
Fig. 3 depicts the forward and lateral displace-
ments achieved for the 10 seed individuals (star
GeneticProgrammingAppliedtoBipedLocomotionControlwithSensoryInformation
57

marker) and the best 4 solutions out of 4 indepen-
dent evolutions for controller 1 (square marker) and
controller 2 (triangle marker). Each evolution took
approximately 30 hours to simulate.
−0.5 0 0.5 1 1.5 2
−0.2
−0.1
0
0.1
0.2
0.3
∆
z
∆
x
Controller 1
Controller 2
Seeds
Controller 1
Best Solution
Controller 2
Best Solution
(m)
(m)
Figure 3: Displacements achieved by 10 seed individu-
als (magenta stars) and 4 solutions of controller 1 (blue
squares) and controller 2 (red triangles), in flat ground. Ini-
tial position is (0,0).
The forward displacement, ∆
z
, achieved by the
evolved solutions of both controllers was far better
than the one achieved by the seed individuals. The
lateral displacement, ∆
x
, varied within the solutions.
The best solution was the one named of Best con-
troller 1 and highlighted in Fig. 3, with ∆
x
≈ 2 cm and
∆
z
≈ 1.75 m. Comparatively to the best hand-tunned
one with ∆
x
≈ 3.5 cm and ∆
z
≈ 38 cm it improved
360% in z and 43% in x.
In the overall both controllers presented similar
displacements. This suggests that the inclusion of
feedback in the evolution process further increases the
complexity, and that in case there is no explicit need
for adaptation, that complexity could be discarded.
Fig. 4 shows the evolution of the fitness function
values of the best solution for controller 1 and con-
troller 2. This figure allows to see the variation and
the degree of learning of the best solution for con-
trollers. It is possible to observe that the increasing
of the fitness is slightly faster for controller 2 when
compared with controller 1. This seems to indicate
that the inclusion of feedback can initially speedup
the search. However, the fitness of the best solutions
for both controllers tends to nearly identical values in
the end of the search.
0 10 20 30 40 50 60 70 80 90 100
0
0.5
1
1.5
2
Generations
Fitness
Controller 1 Best
Controller 2 Best
Figure 4: Fitness values for best solutions of controller 1
(solid blue line) and controller 2 (dashed read line) in flat
ground.
Fig. 5 shows the Center of Mass (CoM) trajectory
(red solid line) alongside with the feet position (blue
polygons) during the evaluation procedure, for the so-
lutions highlighted in Fig. 3 as Best controller 1 (top)
and Best controller 2 (bottom). We can observe that
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
−0.1
−0.05
0
0.05
∆
z
∆
x
(m)
(m)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
−0.05
0
0.05
0.1
∆
z
∆
x
(m)
(m)
Figure 5: Trajectories of CoM (solid red line) and feet po-
sitions (blue polygons) in flat ground for controller 1 (top)
and controller 2 (bottom).
lateral displacement is larger for the controller 2 solu-
tion and makes the robot turn left. However, the inclu-
sion of sensory information resulted in a larger excur-
sion of the CoM trajectory. It is now projected within
the bounds of the robot feet thus generating a more
stable locomotion. Further, the robot weight moves
towards the center of the foot which facilitates ver-
tical clearance of the unloaded leg during the swing
phase of the step. The result is a locomotion more en-
trained with the robot dynamics and the environment
conditions.
4.2 Adaptation to Slopes
This experiment is intended to verify the adequacy of
the proposed controllers to adjust the generated tra-
jectories to the current environment, sensed by the de-
scribed sensors. This adaptation to environmentalfea-
tures was evaluated considering slopes, that the robot
is expected to climb and descend.
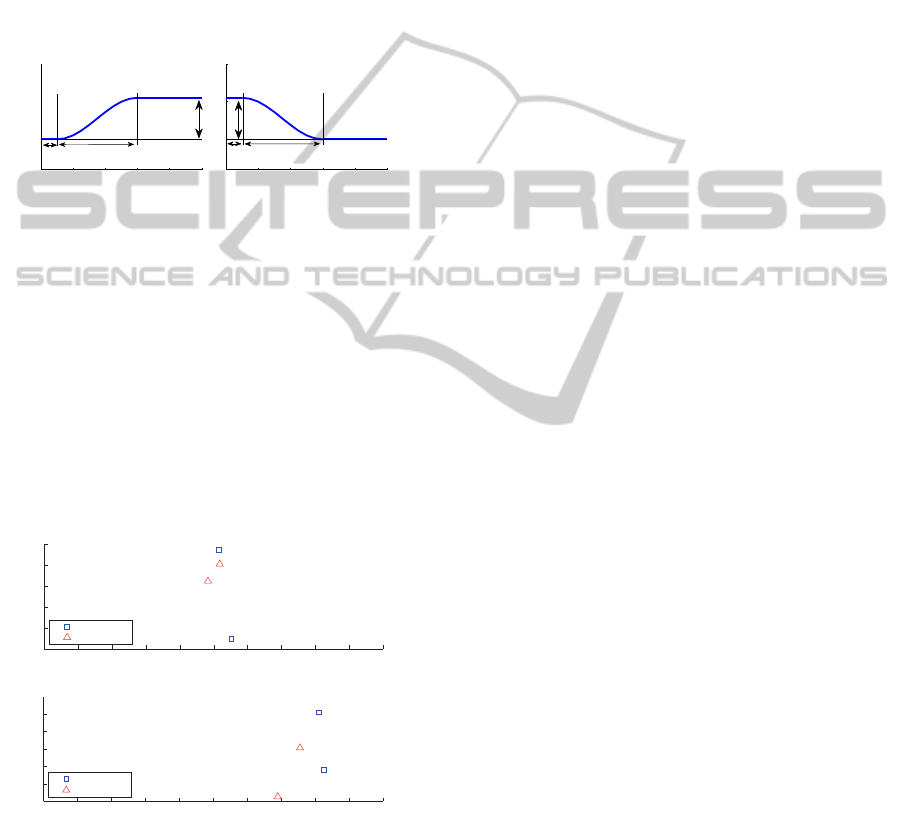
In order to obtain a path with smooth up and down
slopes, these were generated using a sinusoidal func-
tion. The slope for each evaluation task are shown in
Fig. 6, a and b, for the climb and descending tasks, re-
spectively. Each tasks is composed of a single stage,
N = 1. During the evolution, the robot starts 10 cm
away from the slope, both when it will climb or de-
scend. Then, it advances and needs to adapt to the
changing inclination level, whose maximum value is
9.8 degrees, midway through the slope. This corre-
sponds to a maximum height of 5.5 cm and an exten-
sion slope of 50 cm.
From the starting point to the end of the slope
(in both cases of climbing and descending), the robot
needs to walk over 60 cm. As in preliminary evolu-
tion tests the achieved velocities in such conditions
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
58
were lower than the ones on flat ground, the evalua-
tion time was increased to 40 s, instead of the previous
30 s. The initial solutions to this task were bound to
fall over, since the seed had no a priori knowledge
of how to adapt the locomotion to the slope. There-
fore, the fall penalty factor was set as c
fall
= 0.2. This
way, the controllers that caused the robot to fall were
still penalized, but those that were able to reach the
slope and only fell while in the slope, could persist in
the populations and generate solutions that adapt the
locomotion to the slope.
0 0.2 0.4 0.6 0.8 1
0
0.05
0.1
∆
z
Height
0 0.2 0.4 0.6 0.8 1
0
0.05
0.1
∆
z
b
a
5.5 cm
5.5 cm
10 cm
10 cm
50 cm
50 cm
Figure 6: Up-Slope (a) and Down-slope (b) Ground stages.
In these scenarios, both controllers were evolved
two times. Each of which took approximately 35
hours to simulate.
The results are presented in Fig. 7, top and bot-
tom, for the up and down slopes, respectively. The
achieved ∆z displacements are similar for controller
1 (square markers) and controller 2 (triangle mark-
ers) in the up slope. However, in the down slope,
controller 1 seemed to achieve a slightly bigger ∆z
displacement. Also, the climbing seems to be harder
than descending since ∆z is much smaller.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
−0.04
−0.02
0
0.02
0.04
0.06
∆
z
∆
x
Controller 1
Controller 2
(m)
(m)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
−0.01
0
0.01
0.02
0.03
0.04
∆
z
∆
x
Controller 1
Controller 2
(m)
(m)
Figure 7: Forward and lateral displacements when the robot
climbs (top) and descends (bottom) the slopes, for con-
troller 1 (square markers) and controller 2 (triangle mark-
ers).
All solutions were tested in the converse scenario,
i.e., if they were evolved to climb the slope, they were
tested to descend it, and vice-versa. In all those cases,
the robot fell. This suggests that the achieved adap-
tation to the slope did enable the robot to fully adapt
only to the specific environment conditions. This de-
notes a static adaptation for a specific task. However,
a solution that is able to climb (descend) a specific
slope is also able to climb (descend) smaller slopes.
This denotes a certain adaptability to the environment
conditions.
4.3 Up-Slope and Down-slope Ground
In this scenario, the robot has both to climb and de-
scend smooth slopes. Thus, two stages, N = 2, are
considered. Firstly the robot attempts to perform the
climbing stage, secondly, it is placed and reseted in
order to attempt the descending stage. By forcing the
robot to be able to face both these stages, the con-
troller needs to adapt the locomotion to the slope,
rather then statically adapt the robot’s posture during
locomotion. The goal is to verify if sensory inclusion
provides for the required ability to adapt the generated
locomotion to the environment, as well as to compare
the results of both approaches. Further, we are inter-
ested in verifying the impact of sensory inclusion on
the robot behavior.
In this scenario, the evolution stop criteria for each
stage is 40 s and/or a maximum forward displacement
of ∆
z
max
= 0.8 m. Thus, at most both stages take 80 s.
This way, the over specialization on one of the stages
is prevented. The fall penalty factor is set to c
fall
=
0.2.
Three evolutions were performed for both the pro-
posed controllers. Each took approximately 65 hours
to simulate.
The obtained results are listed in table 2. We can
observe that the solutions found without the inclusion
of sensory inputs (Controller 1) were not able to ful-
fill the desired task. The robot fell during the climb-
ing stage. On the other hand, Controller 2 solutions
were all able to both climb and descend the slopes.
These results show that the inclusion of feedback en-
abled the robot to perform the task in both stages, thus
adapting the locomotion as required.
Figs. 8 and 9 show the CoM trajectory (red solid
line) alongside with the feet position (blue polygons)
during the climbing (top) and the descending (bottom)
stages for Controller 1 and Controller 2, respectively,
for the highlighted solutions in table 2. These are
the solutions with higher fitness for both controllers.
This simple functional gait analysis shows that be-
sides finding solutions that do not fall, Controller 2
was able to find solutions in which the CoM move-
ment smoothly oscillates between the center of both
feet with less abrupt oscillations. Again, this shows
up that the proposed framework managed to enhance
GeneticProgrammingAppliedtoBipedLocomotionControlwithSensoryInformation
59

Table 2: Relevant information for Up-Slope and Down-slope Ground stages for both controllers. Distances are expressed in
meters.
Up Down f Disabled
feedback
Full
slope
Controller 1 ∆
z
: fall
∆
x
: fall
∆
z
: 0.8
∆
x
: 0.03
0.29 - no
∆
z
: fall
∆
x
: fall
∆
z
: 0.8
∆
x
: 0.11
0.27 - no
∆
z
: fall
∆
x
: fall
∆
z
: 0.61
∆
x
: 0.24
0.1 - no
Controller 2 ∆
z
: 0.75
∆
x
: -0.08
∆
z
: 0.77
∆
x
: 0.1
0.67 no yes
∆z: 0.6
∆x: 0.05
∆z: 0.65
∆x: 0.07
0.56 no yes
∆
z
: 0.61
∆
x
: 0.09
∆
z
: 0.64
∆
x
: 0.07
0.54 no no
0 0.05 0.1 0.15 0.2 0.25
−0.05
0
0.05
0.1
0.15
∆
z
∆
x
(m)
(m)
0. 0.8 0.9 1 1.1 1.2 1.3
3.95
4
4.05
4.1
∆
z
∆
x
(m)
(m)
Figure 8: Trajectories of CoM (solid red line) and feet po-
sitions (blue polygons) during the climbing (top) and the
descending (bottom) stages of Controller 1 with highest fit-
ness.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
−0.15
−0.1
−0.05
0
0.05
∆
z
∆
x
(m)
(m)
0.7 0.8 0.9 1 1.1 1.2 1.3 1.4
3.95
4
4.05
4.1
∆
z
∆
x
(m)
(m)
Figure 9: Similar to Fig. 8 but for Controller 2.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
−0.3
−0.2
−0.1
0
∆
z
∆
x
(m)
(m)
Figure 10: Trajectory of Controller 2 solution with higher
fitness in the full slope scenario.
the locomotion skills of the biped robot.
A relevant question emerges. What if the sensory
feedback pathways were set to zero in the determined
Controller 2 solutions when performing the up-down
slope? This would show the need for feedback inclu-
sion in the controller, when driving the robot through
the defined task.
The obtained results are presented in table 2 in
the column labeled Disabled feedback. An yes indi-
cates if the solution was still able to walk over the
scenario. In all cases feedback was mandatory for the
Controller 2 solutions to perform both tasks.
The inclination level used in this work, was out of
the reach of Controller 1 solutions, but it is achievable
through the use of feedback pathways. All found so-
lutions were also able to perform locomotion in slopes
with lower inclination values.
In order to verify the solutions’ generality a dif-
ferent scenario was used. During 80 s, the robot is
faced with a complete sine curve, a down slope im-
mediately followed by an up slope, in a continuous
fashion. This scenario is intended to verify if the gen-
erated solutions are able to cope with the overall path.
It requires the controller to continuously adapt the lo-
comotion as it progresses through the slope.
The achieved results are listed in the last column
of table 2, labeled Full Slope, for each of the Con-
troller 2 solutions. An yes indicates if the solution
was able to walk over the scenario. Note that only one
solution was not able to walk over the overall path.
Fig. 10 shows the achieved trajectories for the
Controller 2 solution with highest fitness (highlighted
in table 2). Despite a slight final lateral displace-
ment, it successfully achieved a forward displacement
∆
z
≈ 1.7 m.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
60

5 DISCUSSION
In case of flat ground, the use of feedback pathways
showed no specific advantage, since the solutions
were very similar. These results were the expected
ones, since there was no explicit need for feedback,
and the inclusion of sensory feedback in the search
space further increased the complexity of the opti-
mization problem. However, considering other met-
rics for the performance of the generated movement,
such as the movement of the COM, one can see that
robot motion seems to be more entrained with the en-
vironment and the robot model when in closed-loop.
This needs more attention in future work.
Evolution results in the slope scenarios demon-
strated the ability to generate solutions capable to
climb and descend slopes, both with and without the
inclusion of feedback inputs. However, the achieved
solutions could only perform in the tasks for which
they were evolved to. Otherwise, the robot fell. For
instance, the solutions that were evolved to climb the
slope would fall if tried to descend that same slope.
These results suggest that the robot’s posture was
adapted to the slopes during evolution, rather than its
locomotion generation, as it goes through the slope.
In order to prevent this from happening, a different
scenario composed of up and down stages was eval-
uated, in which each solution evolved in both stages.
The results showed that only the solutions with feed-
back inclusion achieved adaptation to the environ-
ment in both stages. When no feedback was consid-
ered the robot fell during the climbing stage. There-
fore, the use of feedback was required in order to en-
able adaptation to the ground’s slope.
More importantly was to verify the impact that
sensory information inclusion brings to the robot per-
formance and how it enhances the locomotion skills
of the biped robot. This was assessed through a sim-
ple functional gait analysis considering CoM trajecto-
ries. The resultant CoM trajectory was enlarged and
smoothly oscillated between the center of both feet.
Thus, the generated locomotion was more stable and
thus entrained with the robot dynamics and involving
environment.
6 CONCLUSIONS
In this paper, we have proposed a gait optimization
system for a biped robot using GP. Further, we ex-
plore the inclusion of feedback pathways to achieve
locomotion adaptation to the environment. We based
this work in (Matos and Santos, 2012), in which a
CPG based solution using a combination of a small
set of motion primitives was able to generate biped
walking for the DARwIn-OP humanoid robot.
Two controllers were developed. Controller 1
generates biped locomotion for a target platform, and
evolves in open-loop without including any sensory
information from the environment. Controller 2 gen-
erates biped locomotion for the same target platform
but in a closed-loop fashion. Therefore, sensory in-
formation was directly included into the movement
generation by the GP evolution process, in order to
achieve adaptability to the environment.
The obtained results have shown the adequacy of
both controllers to produce different walking locomo-
tion with improved performance over the initial hand-
tuned one, according to the specified criteria. In fact,
the achieved displacement was up to four times larger.
Further, the inclusion of sensory feedback pathways
provided the required adaptability to achieve locomo-
tion with better performance when climbing and de-
scending slopes. These solutions were tested against
the disabling of the feedback (replacing by a null
value), and against scenarios not used in the evolution
stages, demonstrating the generalization of the solu-
tion. The solutions were able to continuously adapt to
the changing inclination of a complete sine curve like
slope, and also were able to walk over slopes of lower
inclination levels.
In the overall, the obtained results emphasize
the fact that the inclusion of feedback has enabled
a smoother locomotion, with less undesired oscilla-
tions. The obtained locomotion was more entrained
with the robot dynamics and the involving environ-
ment. Future work includes to extend this functional
gait analysis to quantify how the proposed frame-
work managed to enhance the locomotion skills of the
biped robot.
Additionally, experiments were performed on a
physical platform. However, a great difference in the
physical setup caused the robot to fall. Such problem
is often referred to as Reality Gap. As future work,
this problem will be addressed similarly to the pro-
posed approach in (Koos et al., 2010), so as to pro-
vide an efficient locomotion controller for a real Dar-
winOP robot.
ACKNOWLEDGEMENTS
This work has been supported by FCT – Fundac¸˜ao
para a Ciˆencia e Tecnologia within the Project Scope
PEst OE/EEI/UI0319/2014.
GeneticProgrammingAppliedtoBipedLocomotionControlwithSensoryInformation
61

REFERENCES
Andersson, B., Svensson, P., Nordahl, M., and Nordin, P.
(2000). On-line evolution of control for a four-legged
robot using genetic programming. Real-World Appli-
cations of Evolutionary Computing, pages 322–329.
Gagn´e, C. and Parizeau, M. (2006). Open beagle: a c++
framework for your favorite evolutionary algorithm.
SIGEVOlution, 1:12–15.
Gritz, L. and Hahn, J. (1997). Genetic programming evo-
lution of controllers for 3-d character animation. Ge-
netic Programming, 97.
Ijspeert, A. J. (2008). 2008 special issue: Central pat-
tern generators for locomotion control in animals and
robots: A review. Neural Networks, 21(4):642–653.
Ijspeert, A. J., Nakanishi, J., and Schaal, S. (2002). Learn-
ing Rhythmic Movements by Demonstration Using
Nonlinear Oscillators. In In Proceedings of the
IEEE/RSJ Int. Conference on Intelligent Robots and
Systems (IROS2002), volume 2002, pages 958–963.
Kim, J.-J., Lee, J.-W., and Lee, J.-J. (2009). Central pattern
generator parameter search for a biped walking robot
using nonparametric estimation based particle swarm
optimization. International Journal of Control, Au-
tomation and Systems, 7(3):447–457.
Kim, Y., Tagawa, Y., Obinata, G., and Hase, K. (2011).
Robust control of cpg-based 3d neuromusculoskeletal
walking model. Biological cybernetics, pages 1–14.
Koos, S., Mouret, J.-B., and Doncieux, S. (2010). Cross-
ing the reality gap in evolutionary robotics by pro-
moting transferable controllers. In Proceedings of the
12th annual conference on Genetic and evolutionary
computation, GECCO ’10, pages 119–126, New York,
NY, USA. ACM.
Matos, V. and Santos, C. P. (2012). Central pattern gen-
erators with phase regulation for the control of hu-
manoid locomotion. Business Innovation Center Os-
aka, Japan.
McSharry, P., Clifford, G., Tarassenko, L., and Smith, L.
(2003). A dynamical model for generating synthetic
electrocardiogram signals. Biomedical Engineering,
IEEE Transactions on, 50(3):289 –294.
Nakanishi, J., Morimoto, J., Endo, G., Cheng, G., Schaal,
S., and Kawato, M. (2004). Learning from demon-
stration and adaptation of biped locomotion. Rob. and
Aut. Systems, 47(2-3):79 – 91.
Ok, S. and Kim, D. (2005). Evolution of the cpg with sen-
sory feedback for bipedal locomotion. Advances in
Natural Computation, pages 428–428.
Ok, S., Miyashita, K., and Hase, K. (2001). Evolving
bipedal locomotion with genetic programming-a pre-
liminary report. In Evolutionary Computation, 2001.
Proceedings of the 2001 Congress on, volume 2,
pages 1025–1032. IEEE.
Sugimoto, N. and Morimoto, J. (2011). Phase-dependent
trajectory optimization for cpg-based biped walking
using path integral reinforcement learning. In Hu-
manoid Robots (Humanoids), 2011 11th IEEE-RAS
International Conference on, pages 255–260. IEEE.
Tanev, I., Ray, T., and Buller, A. (2005). Automated
evolutionary design, robustness, and adaptation of
sidewinding locomotion of a simulated snake-like
robot. Robotics, IEEE Transactions on, 21(4):632–
645.
Vukobratovi´c, M. and Borovac, B. (2004). Zero-moment
point—thirty five years of its life. International Jour-
nal of Humanoid Robotics, 1(01):157–173.
Wolff, K. and Nordin, P. (2003). Learning biped locomo-
tion from first principles on a simulated humanoid
robot using linear genetic programming. In Ge-
netic and Evolutionary Computation—GECCO 2003,
pages 199–199. Springer.
Wolff, K. and Wahde, M. (2007). Evolution of biped loco-
motion using linear genetic programming. Climbing
and Walking Robots, Towards New Applications.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
62
