
Evaluation of Acoustic Feedback Cancellation
Methods with Multiple Feedback Paths
B. C. Bispo and D. R. Freitas
Department of Electrical and Computer Engineering, University of Porto, Porto, Portugal
Keywords:
Public Address System, Acoustic Feedback Cancellation, Evaluation, Multiple Feedback Paths.
Abstract:
Acoustic feedback limits the maximum stable gain of a public address system and may cause the system to be-
come unstable. Acoustic feedback cancellation methods use an adaptive filter to identify the impulse response
of the acoustic feedback path and then remove its influence from the system. However, if the traditional adap-
tive filtering algorithms are used, a bias is introduced in the estimate of the acoustic feedback path obtained by
the adaptive filter. Several methods have been proposed to overcome the bias problem but they are generally
evaluated considering a public address system with only one microphone and one loudspeaker. This work
evaluates some of the state-of-art methods considering a public address system with one microphone and four
loudspeakers that results in multiple feedback paths and corresponds to a more realistic scenario of a typical
system. Simulation results demonstrated that, with multiple feedback paths, the acoustic feedback cancellation
methods are able to increase in 12 dB the maximum stable gain of the public address system when the source
signal is speech.
1 INTRODUCTION
In a typical public address (PA) system, a speaker uses
loudspeakers and microphones along with an amplifi-
cation system to apply a gain on his/her voice signal,
aiming to be heard by a large amount of people in
the same acoustic environment. The speaker’s speech
signal v(n), after being picked up by the micro-
phones, amplified and played back by the loudspeak-
ers, may return to the microphones going through sev-
eral paths. Such a system is illustrated in Fig. 1 with,
as usual, only one microphone and one loudspeaker.
Forward Feedback
PathPath
P P
u(n) v(n)
r(n)
x(n)
y(n)
G(z, n) F (z, n)
Figure 1: Acoustic feedback in a PA system.
Among these paths are included the direct one, if
it exists, as well as the ones given by a large num-
ber of reflections. In all cases there is some signal
attenuation which becomes more intense with the in-
crease in length and therefore only a finite number
of reflections can be considered in the feedback path.
For simplicity, the feedback path also includes the
characteristics of the D/A converter, loudspeaker, mi-
crophone and A/D converter. Although some non-
linearities may occur due to saturation of the loud-
speaker, almost invariably it is considered that these
devices have unit responses and that the feedback path
is linear. Hence, the acoustic feedback path is usually
defined as a finite impulse response (FIR) filter
F(z,n) = f
0
(n) + f
1
(n)z
−1
+ . .. + f
L
F
−1
(n)z
−(L
F
−1)
= [ f
0
(n) f
1
(n) ... f
L
F
−1
(n)]
1
z
−1
.
.
.
z
−(L
F
−1)
= f
T
(n)z (1)
with length L
F
.
The forward path includes the characteristics of
the amplifier as well as of any other signal processing
device inserted in the signal loop, such as an equal-
izer. Once again, although some non-linearities may
exist because of compression, the forward path is usu-
127
Bispo B. and Freitas D..
Evaluation of Acoustic Feedback Cancellation Methods with Multiple Feedback Paths.
DOI: 10.5220/0005068201270133
In Proceedings of the 11th International Conference on Signal Processing and Multimedia Applications (SIGMAP-2014), pages 127-133
ISBN: 978-989-758-046-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

ally assumed to be linear and defined as an FIR filter
G(z,n) = g
0
(n) + g
1
(n)z
−1
+ . .. + g
L
G
−1
(n)z
−(L
G
−1)
= g
T
(n)z (2)
with length L
G
and has g
0
(n) = 0, ∀n, for closed-loop
analysis.
Let the system input signal u(n) be the source sig-
nal v(n) added to the ambient noise signal r(n), i.e.,
u(n) = v(n) + r(n), and, for simplicity, also include
the characteristics of the microphone and A/D con-
verter. The system input signal u(n) and the loud-
speaker signal x(n) are related by the system closed-
loop transfer function as
X(z) =
G(z,n)
1− G(z,n)F(z,n)
U(z). (3)
According to the Nyquist’s stability criterion, the
closed-loop system will become unstable if there is at
least one frequency ω such that
(
G(e
jw
,n)F(e
jw
,n)
≥ 1
∠G(e
jw
,n)F(e
jw
,n) = 2kπ, k ∈ Z.
(4)
It means that if at least one frequency compo-
nent is reinforced after traversing the system open-
loop transfer function G(z,n)F(z,n) and is added to
the input signal u(n) with no phase shift, this fre-
quency component will never disappear from the sys-
tem even if there is no more input signal. After each
loop through the system, its amplitude will increase
causing a howling at that frequency, a phenomenon
known as Larsen effect (Rombouts et al., 2006; van
Waterschoot and Moonen, 2011). This howling will
be very annoying for all listeners present and the sys-
tem gain generally has to be reduced. As a conse-
quence, the maximum stable gain (MSG) of the PA
system is limited by the occurrence of acoustic feed-
back (Rombouts et al., 2006; van Waterschoot and
Moonen, 2011).
In order to eliminate or, at least, to control the
Larsen effect, several methods have been developed
over the past decades (van Waterschoot and Moonen,
2011). The acoustic feedback cancellation (AFC)
methods identify and track the acoustic feedback path
F(z,n) using an adaptive filter that is generally de-
fined as an FIR filter
H(z,n) = h
0
(n) + h
1
(n)z
−1
+ . .. + h
L
H
−1
(n)z
−(L
H
−1)
= h
T
(n)z (5)
with length L
H
. Then, the feedback signal f(n) ∗ x(n)
is estimated as h(n) ∗ x(n) and subtracted from the
microphone signal y(n) so that, ideally, only the sys-
tem input signal u(n) is processed by the forward path
G(z,n). Such a scheme is shown in Fig. 2.
Forward
Path
_
+
Adaptive Feedback
Path
Filter
P P
G(z, n)
P
H(z, n)
y(n) u(n) v(n)
r(n)
F (z, n)
e(n)
x(n)
Figure 2: Typical AFC system.
But, because of the presence of the forward path
G(z,n), the estimation noise (system input u(n)) and
input (loudspeaker x(n)) signals to the adaptive filter
are highly correlated. Then, if the traditional adap-
tive filtering algorithms based on the Wiener theory
or least squares are used, a bias is introduced in the
estimate of the acoustic feedback path (Siqueira and
Alwan, 2000; Hellgren and Forssell, 2001). As un-
desired consequences, the adaptive filter H(z,n) will
only partially cancel the feedback signal f(n) ∗ x(n)
and will also apply distortions in the system input sig-
nal u(n).
Mostly, the solutions existing in the literature to
overcome the bias in the estimate of the feedback
path try to, somehow, decorrelate the loudspeaker
x(n) and system input u(n) signals. Among them, the
PEM-AFROW stands out for having the best perfor-
mance (Rombouts et al., 2006; van Waterschoot and
Moonen, 2011). Recently, one method that extracts
well-defined information from the cepstrum of the mi-
crophone signal to update the adaptive filter was pro-
posed (Bispo et al., 2013). However, until nowadays,
only results in PA systems with a single feedback path
were presented.
The present work evaluates the performance of
some state-of-art AFC methods in a more realistic
scenario with multiple feedback paths. The paper
is organized as follows: Section 2 presents a typical
PA system with multiple feedback paths; Section 3
briefly presents the AFC methods under evaluation;
Section 4 describes the configuration of the simulated
experiments; in Section 5, the obtained results are pre-
sented and discussed. Finally, Section 6 concludes the
paper emphasizing its main contributions.
2 AFC SYSTEM WITH
MULTIPLE FEEDBACK PATHS
Typically, aiming to be heard by a large audience in
the same acoustic environment, a speaker uses a PA
system with one microphone, responsible for picking
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
128

up his/her own voice, one amplification system, re-
sponsible for amplifying the voice signal, and several
loudspeakers placed in different positions, responsi-
ble for playback and distributing the voice signal in
the acoustic environment so that everyone in the au-
dience can hear it.
Such typical PA system with 1 microphone and
C loudspeakers is showed in Fig.3. The loudspeaker
signal x(n), after played back by the kth-loudspeaker,
may be picked up by the microphone going through
the feedback path F
k
(z,n). The C acoustic feedback
signals f
k
(n) ∗ x(n) are added to the system input sig-
nal u(n), generating the microphone signal
y(n) = u(n) +
C
∑
k=1
f
k
(n) ∗ x(n). (6)
Then, the feedback signals are estimated as h(n)∗
x(n) and subtracted from the microphone signal y(n),
generating the error signal
e(n) = u(n) +
C
∑
k=1
f
k
(n) ∗ x(n) − h(n) ∗ x(n)
= u(n) +
"
C
∑
k=1
f
k
(n) − h(n)
#
∗ x(n),
(7)
which is effectively the signal to be processed by the
forward path G(z,n). The error signal e(n) will con-
tain no acoustic feedback as desired if
H(z,n) =
C
∑
k=1
F
k
(z,n). (8)
In this multiple feedback paths scenario, the adap-
tive filter has an optimum solution equal to the sum of
the single acoustic feedback paths. Indeed, the AFC
system with multiple feedback paths in Fig.3 can be
simplified to the AFC system with single feedback
path in Fig. 2 by considering F(z,n) as the overall
acoustic feedback path such that
F(z,n) =
C
∑
k=1
F
k
(z,n). (9)
However, in this case, F(z,n) generally has more
prominent peaks and a lower sparseness which have
influence on the performance of adaptive filtering al-
gorithms (Das and Chakraborty,2012). Therefore, the
evaluation of AFC methods using multiple feedback
paths is essential because it corresponds to a more re-
alistic scenario of a typical PA system.
3 EVALUATED AFC METHODS
In this Section, a brief description of the AFC meth-
ods under evaluation is presented.
Feedback
Path
Feedback
Path
Forward
Path
_
+
Adaptive
Filter
P P
y(n)e(n)
F
1
(z, n) F
C
(z, n)G(z, n)
P
H(z, n)
x(n)
u(n)
Figure 3: Typical AFC system with multiple feedback
paths.
3.1 AFC Based on Whitening
Pre-filtering
The PEM-AFROW method considers that the system
input signal u(n) can be approximated according to
U(z) = M(z,n)W(z), (10)
where w(n) is a white noise with zero mean and the
inverse source model M
−1
(z,n) is defined as
M
−1
(z,n) = A(z,n)B(z,n), (11)
where A(z,n) is a short-time prediction filter that
models the vocal tract and B(z,n) is a long-time pre-
diction filter that models the periodicity.
From each frame of the error signal e(n) which
is expected to be close to u(n), the PEM-AFROW
method estimates A(z, n) using the well-known
Levinson-Durbin algorithm and thereafter B(z,n) us-
ing a one-tap filter with lag equal to the pitch pe-
riod. Then, the method pre-filters the loudspeaker
x(n) and microphone y(n) signals with the inverse
source model in order to obtain whitened versions of
them. Finally, these whitened signals are used to up-
date the adaptive filter according to the NLMS algo-
rithm (Rombouts et al., 2006).
3.2 AFC Based on Cepstrum of the
Microphone Signal
In an AFC system as depicted in
Fig. 2, if
G(e
jω
,n)H(e
jω
,n)
< 1 and
G(e
jω
,n)
F(e
jω
,n) − H(e
jω
,n)
< 1, the cep-
strum of the microphone signal y(n) is defined
as (Bispo et al., 2013)
c
y
(τ) =c
u
(τ) +
∞
∑
k=1
g
∗k
(n)
k
∗
n
[f(n) − h(n)]
∗k
+ (−1)
k+1
h
∗k
(n)
o
,
(12)
where {·}
∗k
denotes the kth convolution power.
EvaluationofAcousticFeedbackCancellation-MethodswithMultipleFeedbackPaths
129
0 100 200 300 400 500
−0.2
0
0.2
Samples
Amplitude
a)
0 100 200 300 400 500
−0.2
0
0.2
Samples
Amplitude
b)
0 100 200 300 400 500
−0.2
0
0.2
Samples
Amplitude
c)
0 100 200 300 400 500
−0.2
0
0.2
Samples
Amplitude
d)
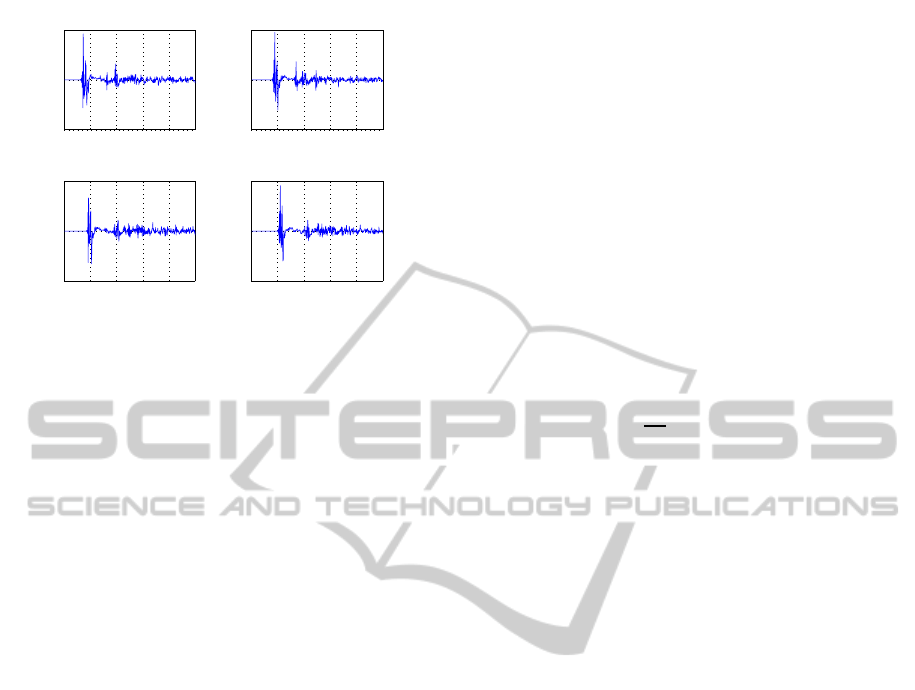
Figure 4: Impulse responses of the acoustic feedback paths
(zoom in the first 500 samples).
From (12), the AFC-CM method extracts {g(n) ∗
f(n)}b, an instantaneous estimate of the system open-
loop impulse response, and thereafter obtains
ˆ
f(n), an
instantaneous estimate of the impulse response of the
feedback path. Finally, the method updates the adap-
tive filter according to (Bispo et al., 2013)
h(n) = λh(n− 1) + (1− λ)
ˆ
f(n), (13)
where 0 ≤ λ < 1 is the factor that controls the trade-
off between robustness and tracking rate of the adap-
tive filter.
4 SIMULATION
CONFIGURATIONS
To assess the performance of the AFC methods, an
experiment was made in a simulated environment to
measure its abilities to increase the maximum stable
gain of a PA system. For this purpose, the following
configuration was used.
4.1 Simulated Environment
In order to simulate a PA environment with multi-
ple feedback paths, 4 measured impulse responses of
the same room, from (Jeub et al., 2009), were used
as the impulse response f
k
of the acoustic feedback
paths. The impulse responses was downsampled to
f
s
= 16 kHz and then truncated to length L
F
= 4000
samples, and are illustrated in Fig. 4.
The forward path, that is the amplifier of the PA
system, was simply defined as an unity delay and a
gain according to
G(z,n) = g
1
(n)z
−1
, (14)
with length L
G
= 2.
The insertion of a delay filter immediately after
the forward path G(z,n) is a common practice in the
AFC methods. Then, the forward path G(z,n) was
followed by a delay filter
D(z) = z
−(L
D
−1)
(15)
with length L
D
= 401 so that generates a time delay
of 25 ms.
4.2 Maximum Stable Gain
In order to measure the maximum stable gain of
the PA system, a broadband gain K(n) was defined,
similarly to (van Waterschoot and Moonen, 2011),
as the average magnitude of the frequency response
G(e
jω
,n) of the forward path
K(n) =
1
2π
2π
∑
ω=0
|G(e
jω
,n)|, (16)
and is extracted from G(z,n) by
G(z,n) = K(n)J(z,n). (17)
Considering that J(z,n) is known, the maximum
stable gain (MSG) was defined as
MSG(n)(dB) = 20log
10
K(n)
such that max
ω∈P(n)
G(e
jω
,n)D(e
jω
)F(e
jω
,n)
= 1,
(18)
resulting in (19), where P(n) denotes the set of fre-
quencies that fulfill the phase condition in (4), also
called critical frequencies of the PA system, and is
defined as (20).
The MSG of the PA system with no AFC method
was defined as MSG
0
= 20log
10
K
0
. K(n) was initial-
ized to a value K
1
such that 20log
10
K
1
< MSG
0
in
order to allow the AFC method to operate in a stable
condition and thus the adaptive filter to converge. As
suggested in (van Waterschoot and Moonen, 2011), it
was defined that 20log
10
K
1
= MSG
0
− 3, i.e., a 3 dB
initial gain margin.
In a first configuration, K(n) remained at the same
value, K(n) = K
1
, during all the simulation time
T = 20 s in order to verify the methods’ performance
for a time-invariant forward path G(z, n). In a more
practical configuration, K(n) = K
1
until 5 s and then
20log
10
K(n) was increased at the rate of
1dB
/s up to
20log
10
K
2
such that 20log
10
K
2
= 20log
10
K
1
+ ∆K.
Finally, K(n) = K
2
during 10 s totaling a simulation
time T = 15+ ∆K s.
As the main goal of the AFC methods is to in-
crease the MSG of the PA system, it is necessary to in-
clude the frequencyresponse H(e
jω
,n) of the adaptive
filter in the MSG measurement. Then, the MSG of a
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
130

MSG(n)(dB) = −20log
10
max
ω∈P(n)
J(e
jω
,n)D(e
jω
)F(e
jω
,n)
. (19)
P(n) =
ω|∠G(e
jω
,n)D(e
jω
)F(e
jω
,n)= 2kπ,k ∈ Z
. (20)
MSG(n)(dB) = −20log
10
max
ω∈P
H
(n)
J(e
jω
,n)D(e
jω
)
F(e
jω
,n) − H(e
jω
,n)
. (21)
∆MSG(n)(dB) = −20log
10
"
max
ω∈P
H
(n)
J(e
jω
,n)D(e
jω
)
F(e
jω
,n) − H(e
jω
,n)
max
ω∈P(n)
|J(e
jω
,n)D(e
jω
)F(e
jω
,n)|
#
. (22)
P
H
(n) =
ω|∠G(e
jω
,n)D(e
jω
)
F(e
jω
,n) − H(e
jω
,n)
= 2kπ, k ∈ Z
. (23)
PA system with an AFC method was defined as (21).
Moreover, the increase in MSG provided by the AFC
method, ∆MSG, was defined as (22). In both equa-
tions, P
H
denotes the set of frequencies that fulfill the
phase condition of the system with the insertion of
the adaptive filter, also called critical frequencies of
the AFC system, as defined according to (23).
4.3 Frequency-weighted Log-spectral
Signal Distortion
The sound quality was measured by the frequency-
weighted log-spectral signal distortion defined as (van
Waterschoot and Moonen, 2011)
SD(n) =
v
u
u
t
ω
u
∑
ω=ω
l
w(ω)
10log
10
S
e
(e
jω
,n)
S
u
(e
jω
,n)
2
, (24)
where S
e
(e
jω
,n) and S
u
(e
jω
,n) are the short-term
power spectrum density of the error signal e(n) and
system input signal u(n), respectively, and w(ω)
is a weighting function that gives equal weight to
each auditory critical band between ω
l
= 0.0375π
(equivalent to 300 Hz) and ω
u
= 0.8π (equivalent to
6400 Hz) (ANSI, 1997). The short-term power spec-
trum densities S
e
(e
jω
,n) and S
u
(e
jω
,n) are computed
using frames of 20 ms.
Indeed, SD(n) quantifies the distortion inserted in
the error signal e(n) in comparison with the system
input signal u(n). The SD(n) value will be as low
as the inserted distortion is and has optimum value
SD(n) = 0 when e(n) = u(n). In general, SD(n) → 0
as long as e(n) → u(n).
4.4 Speech database
The signals database used in the simulations was
formed by 10 speech signals. Each speech signal
was composed of several basic signals from a speech
database. Each basic signal consisted of one 4 s short
sentence with original sampling rate of 48 kHz but
downsampled to f
s
= 16 kHz. All basic signals were
recorded in the talkers native language, and their na-
tionalities and genders were the following:
• 4 Americans (2 males and 2 females)
• 2 British (1 male and 1 female)
• 2 French (1 male and 1 female)
• 2 Germans (1 male and 1 female)
But since the performance assessment of adap-
tive filters needs longer signals, several basic sig-
nals from the same talker were concatenated and had
their silence parts removed by a voice activity detec-
tor (VAD), resulting in the mentioned 10 speech sig-
nals (1 signal per talker).
5 SIMULATION RESULTS
This Section compares the performance of the AFC
methods under evaluation using speech signal as the
source signal v(n). The evaluation was done in a situ-
ation close to real-world conditions where the source-
signal-to-noise ratio (SNR) was 30 dB. With the ex-
ception of the adaptive filters’ parameters, the param-
eters of all methods had the same values as originally
proposed(adjusted to f
s
= 16 kHz in the case of PEM-
AFROW).
The optimization of the adaptive filter parameters
(λ and L
H
in the case of the AFC-CM, and stepsize
µ, normalization parameter δ and L
H
of the PEM-
AFROW) was performed for each signal. From a pre-
defined range for each one, the values were chosen
empirically in order to optimize the curve MSG(n),
and consequently ∆MSG(n), in terms of minimum
area of instability and, secondarily, of maximum
mean value within the simulation time. The optimal
curves for the kth signal were defined as MSG
k
(n)
and ∆MSG
k
(n) while the respective SD(n) curve as
SD
k
(n).
EvaluationofAcousticFeedbackCancellation-MethodswithMultipleFeedbackPaths
131
Then, the optimal average curves MSG
o
(n),
∆MSG
o
(n) and SD
o
(n) were obtained by averaging
the optimal curves of each signal according to
MSG
o
(n) =
1
10
10
∑
k=1
MSG
k
(n), (25)
∆MSG
o
(n) =
1
10
10
∑
k=1
∆MSG
k
(n), (26)
and
SD
o
(n) =
1
10
10
∑
k=1
SD
k
(n). (27)
And their respective mean values were defined as
MSG
o
=
1
N
T
N
T
∑
n=1
MSG
o
(n), (28)
∆MSG
o
=
1
N
T
N
T
∑
n=1
∆MSG
o
(n), (29)
and
SD
o
=
1
N
T
N
T
∑
n=1
SD
o
(n), (30)
where N
T
is the number of samples relating to the
simulation time. In addition, the asymptotic value of
∆MSG
o
was defined as
−−−−→
∆MSG
o
, which represents the
MSG increase provided by the AFC methods, and was
estimated only by inspection of the curve.
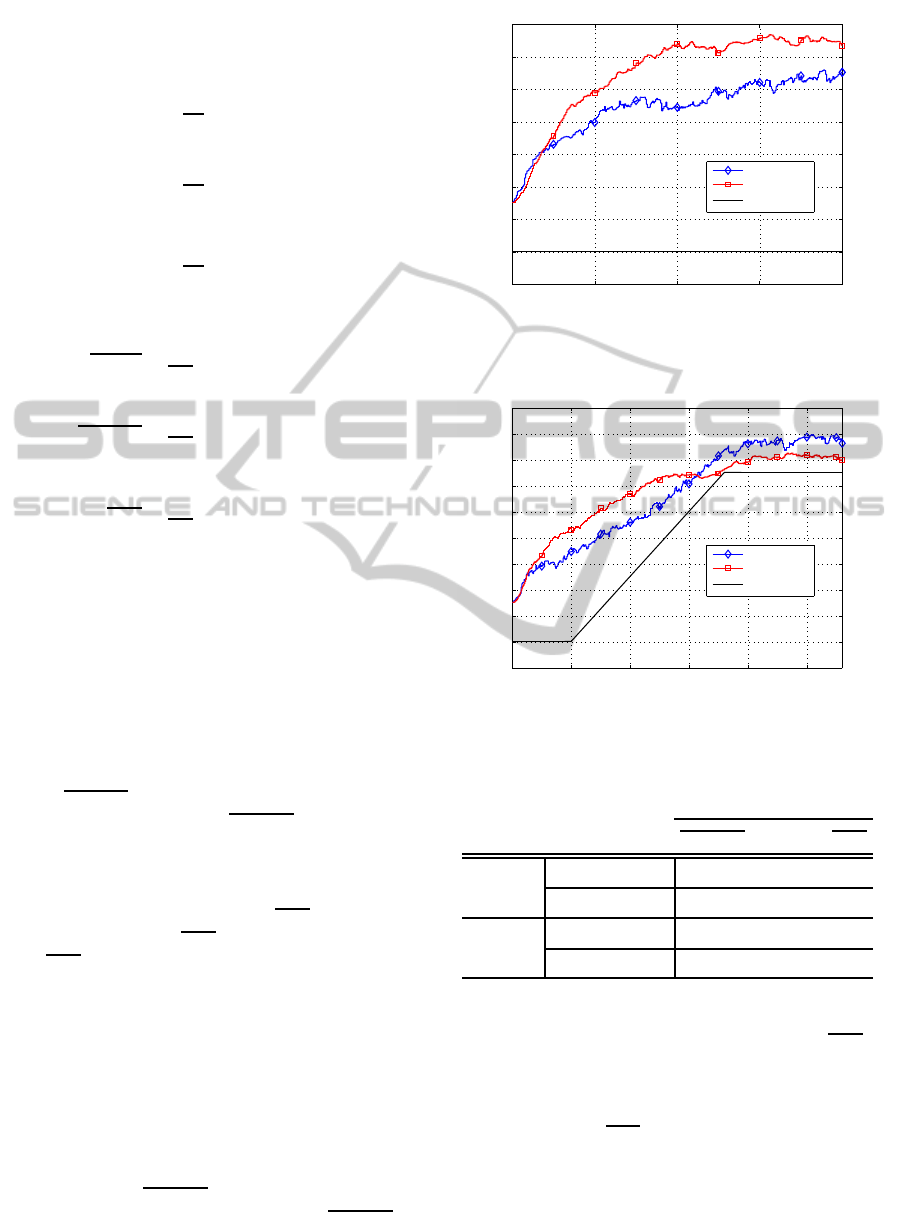
In the first configuration, the broadband gain K(n)
remained constant, i.e., ∆K = 0. Fig. 5 shows the re-
sults obtained by the AFC methods under evaluation
for ∆K = 0. As can be observed, the AFC-CM method
outperformed the PEM-AFROW. The PEM-AFROW
obtained
∆MSG
o
= 5.6 dB and
−−−−→
∆MSG
o
≈ 7.4 dB
while the AFC-CM achieved
∆MSG
o
= 7.9 dB and
−−−−→
∆MSG
o
≈ 10 dB.
With respect to sound quality, the same order of
performance was obtained but with very similar re-
sults. The PEM-AFROW obtained
SD
o
= 1.9 while
the AFC-CM achieved SD
o
= 1.8. These low and
similar
SD
o
values may be explained by the fact that,
with such fixed value of K(n) and with the increase in
MSG provided by all the AFC methods, the systems
were too far from the instability.
In the second configuration, K(n) was increased
by ∆K = 13 dB. Fig. 6 shows the results obtained
by the AFC methods for ∆K = 13 dB. As can
be observed, the AFC-CM outperformed the PEM-
AFROW in the first half of the simulation runtime
while the opposite occurs in the second half. The
AFC-CM obtained
∆MSG
o
= 8.5 dB and
−−−−→
∆MSG
o
≈
11.2 dB while the PEM-AFROW achieved
∆MSG
o
=
8.2 dB and
−−−−→
∆MSG
o
≈ 12.4 dB.
0 5 10 15 20
−14
−12
−10
−8
−6
−4
−2
0
2
Time (s)
MSG
o
(n) (dB)
PEM−AFROW
AFC−CM
20log
10
K(n)
Figure 5: Average results of the methods for speech signal
and ∆K = 0.
0 5 10 15 20 25
−14
−12
−10
−8
−6
−4
−2
0
2
4
6
Time (s)
MSG
o
(n) (dB)
PEM−AFROW
AFC−CM
20log
10
K(n)
Figure 6: Average results of the methods for speech signal
and ∆K = 13.
Table 1: Summary of results obtained by the PEM-AFROW
and AFC-CM methods using speech as source signal.
∆MSG
o
−−−−→
∆MSG
o
SD
o
∆K = 0
PEM-AFROW 5.6 7.4 1.9
AFC-CM 7.9 10 1.8
∆K = 13
PEM-AFROW 8.2 12.4 3.1
AFC-CM 8.5 11.2 3.7
In terms of sound quality, the AFC-CM method
presented the worst performance by achieving SD
o
=
3.7 because it had a low stability margin after t = 17 s,
as can be observed in Fig. 6, which resulted in an ex-
cess reverberation in the error signal e(n). The PEM-
AFROW obtained
SD
o
= 3.1.
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
132

6 CONCLUSIONS
Acoustic feedback limits the maximum stable gain of
a public address system and thus may cause the sys-
tem to become unstable resulting in a howling at a
specific frequency, a phenomenon known as Larsen
effect. Acoustic feedback cancellation methods use
an adaptive filter to identify the impulse response of
the acoustic feedback path and then remove its in-
fluence from the system. However, since in such a
system the source and loudspeaker signals are corre-
lated, acoustic feedback cancellation methods that use
traditional adaptive filtering algorithms based on the
Wiener theory or least squares present a bias in the
estimate of the acoustic feedback path if no decorre-
lation algorithm is used.
Several methods have been proposed to overcome
the bias problem. However, the methods are generally
evaluated considering a public address system with
only one microphone and one loudspeaker. This work
evaluates some of the state-of-art methods consider-
ing a public address system with one microphone and
four loudspeakers that results in multiple feedback
paths and corresponds to a more realistic scenario of
a typical system.
Simulation results demonstrated that, with multi-
ple feedback paths, the AFC methods are able to in-
crease in around 12 dB the maximum stable gain of
the public address system when the source signal is
speech.
ACKNOWLEDGEMENTS
This work was partially supported by FCT
- Fundac¸˜ao para a Ciˆencia e a Tecnologia
(SFRH/BD/49038/2008) and by the project
AAL4ALL - FCOMP-01-0124-FEDER-13852,
co-financed by European Community Fund FEDER
through COMPETE - Programa Operacional Factores
de Competitividade (POFC).
REFERENCES
ANSI (1997). ANSI S3.5: American national standard
methods for calculation of the speech intelligibility in-
dex. American National Standard Institute.
Bispo, B. C., Rodrigues, P. M. L., and da S. Freitas, D. R.
(2013). Acoustic feedback cancellation based on cep-
stral analysis. In Proceedings of 17th IEEE Confer-
ence on Signal Processing Algorithms, Architectures,
Arrangements and Applications, pages 205–209, Poz-
nan, Poland.
Das, R. L. and Chakraborty, M. (2012). Sparse adaptive fil-
ters - an overview and some new results. In Proceed-
ings of the 2012 IEEE International Symposium on
Circuits and Systems, pages 2745–2748, Seoul, Soutjh
Korea.
Hellgren, J. and Forssell, U. (2001). Bias of feedback
cancellation algorithms in hearing aids based on di-
rect closed loop identification. IEEE Transactions on
Speech and Audio Processing, 9(7):906–913.
Jeub, M., Sch¨afer, M., and Vary, P. (2009). A binaural room
impulse response database for the evaluation of dere-
verberation algorithms. In Proc. International Confer-
ence on Digital Signal Processing, Santorini, Greece.
Rombouts, G., van Waterschoot, T., Struyve, K., and
Moonen, M. (2006). Acoustic feedback cancellation
for long acoustic paths using a nonstationary source
model. IEEE Transactions on Signal Processing,
54(9):3426–3434.
Siqueira, M. G. and Alwan, A. (2000). Steady-state analysis
of continuous adaptation in acoustic feedback reduc-
tion systems for hearing-aids. IEEE Transactions on
Speech and Audio Processing, 8(4):443–453.
van Waterschoot, T. and Moonen, M. (2011). Fifty years of
acoustic feedback control: state of the art and future
challenges. Proceedings of the IEEE, 99(2):288–327.
EvaluationofAcousticFeedbackCancellation-MethodswithMultipleFeedbackPaths
133
