
Is it Possible to Generate Good Earthquake Risk Models Using
Genetic Algorithms?
Claus Aranha
1
, Yuri Cossich Lavinas
2
, Marcelo Ladeira
2
and Bogdan Enescu
3
1
University of Tsukuba, Graduate School of Systems and Information Engineering, Tsukuba, Japan
2
University of Brasilia, Department of Computer Science, Brasilia DF, Brazil
3
University of Tsukuba, Faculty of Life and Environmental Sciences, Tsukuba, Japan
Keywords:
Earthquakes, Forecast Model, Genetic Algorithm, Application.
Abstract:
Understanding the mechanisms and patterns of earthquake occurrence is of crucial importance for assessing
and mitigating the seismic risk. In this work we analyze the viability of using Evolutionary Computation (EC)
as a means of generating models for the occurrence of earthquakes. Our proposal is made in the context of
the ”Collaboratory for the Study of Earthquake Predictability” (CSEP), an international effort to standardize
the study and testing of earthquake forecasting models. We use a standard Genetic Algorithm (GA) with real
valued genome, where each allele corresponds to a bin in the forecast model. The design of an appropriate
fitness function is the main challenge for this task, and we describe two different proposals based on the log-
likelihood of the candidate model against the training data set. The resulting forecasts are compared with the
Relative Intensity algorithm, which is traditionally employed by the CSEP community as a benchmark, using
data from the Japan Meteorological Agency (JMA) earthquake catalog. The forecasts generated by the GA
were competitive with the benchmarks, specially in scenarios with a large amount of inland seismic activity.
1 INTRODUCTION
Earthquakes pose a great risk for human society, in
their potential for large scale loss of life and de-
struction of infra-structure. In the last decade, large
Figure 1: Seismic Activity in Eastern Japan in 2011. Each
circle represents one earthquake.
earthquakes such as Sumatra (2004), Kashmir (2005),
Sichuan (2008) and Touhoku (2011, shown in Fig-
ure 1) caused terrible amounts of casualties.
It is crucially important to understand the pat-
terns and mechanisms behind the occurrence of earth-
quakes. This knowledge may allow us to create bet-
ter seismic risk forecast models, indicating which re-
gions show a higher probability of earthquake occur-
rence at certain periods in time. Such information can
be put to good use for mitigating damage through ur-
ban planning, civil engineering codes, emergency pre-
paredness, et cetera.
Earthquake “prediction” is a polemic subject. No
research so far has even come close to suggesting that
individual large scale earthquakes can be predicted
with any sort of precision. On the other hand, it is
clear that at the very least earthquakes do cluster in
time and space. There is a lot of value behind the
study of earthquake mechanisms, with the goal of
generating statistical models of earthquake risk (Sae-
gusa, 1999). Accordingly, in this paper we focus on
models of earthquake risk, and not on earthquake pre-
diction.
Surprisingly enough, applications of Evolution-
ary Computation (EC) for the problem of earthquake
49
Aranha C., Lavinas Y., Ladeira M. and Enescu B..
Is it Possible to Generate Good Earthquake Risk Models Using Genetic Algorithms?.
DOI: 10.5220/0005072600490058
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (ECTA-2014), pages 49-58
ISBN: 978-989-758-052-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

forecasting have been few and far between. Given that
EC has some times managed to find better solutions
than humans for hard problems (Koza et al., 2003),
we wonder if Artificial Evolution might not be able
to find new ideas that improve our understanding of
earthquakes and their processes.
With this in mind, the goal of this paper is to ex-
plore the suitability of Evolutionary Computation to
the problem of generating earthquake forecast mod-
els. We aim to provide two main contributions:
1. Outline the earthquake forecast problem, which
can be used as a foundation for other researchers
who wish to contribute to this field.
2. Show that Evolutionary Computation is a promis-
ing methodology for the creation of earthquake
forecast models, providing the motivation for fur-
ther research in this direction.
It is important to note that our goal is not to gen-
erate an “earthquake alarm system”. Rather, we use
Evolutionary Algorithms to find patterns that can be
useful for further understanding the mechanisms be-
hind earthquake occurrence.
A common problem with applications of evolu-
tionary algorithms is how to compare different meth-
ods, developed by different groups with different test-
ing protocols, in a scientific fashion. We survey and
summarize the “best practices” for the studying and
testing of earthquake forecast models, as suggested
by the Collaboratory for the Study of Earthquake
Predictability (CSEP), an international partnership to
promote rigorous study of the feasibility of earth-
quake forecasting and predictability.
Based on this framework, we design and imple-
ment a simple Genetic Algorithm for earthquake fore-
cast modeling (GAModel). We compare forecasts
generated by the GAModel with the Relative Inten-
sity algorithm (RI) and an information-less forecast.
These systems are applied on the earthquake catalog
from the Japanese Meteorological Agency (JMA), us-
ing event data from 2005 to 2012. The forecasts are
analyzed by their log-likelihood values compared to
the actual data, as suggested in the Regional Earth-
quake Likelihood Model (RELM), and by the Area
Skill Score (ASS) test.
The forecasts created by the GAModel were gen-
erally competitive in relation to the RI algorithm, spe-
cially in scenarios with large amount of inland seis-
mic activity. We discuss some of the strong and weak
points identified from the experiment. The results
overall show that while there is vast room for im-
provement, Evolutionary Algorithm approaches def-
initely have potential in this field.
This paper is an extension of the ideas initially
proposed in (Aranha and Enescu, 2014). In the cur-
rent work, we show the set-up of the genetic algo-
rithm used in great detail, including the discussion of
two fitness function. A larger number of earthquake
scenarios is considered, with the addition of offshore
earthquakes. We also make a detailed presentation
of the problem, to those researchers not familiar with
this field.
The paper is organized as follows: in Section 2
we detail the earthquake forecast problem, and the
CSEP framework. Section 3 reviews applications of
Evolutionary Computation in the context of seismol-
ogy research. In Section 4 we detail the proposed
Genetic Algorithm system for generating earthquake
forecasts. In Section 5 we present the results of the
comparisons between this system and the RI algo-
rithm. In Section 6 we discuss the implications of the
results and conclude the paper.
2 THE EARTHQUAKE
FORECASTING PROBLEM
In the field of seismology, there is a large number of
model proposals for earthquake forecasting. These
proposals range from methods based on geophysical
principles to purely statistical algorithms.
In this context, the Collaboratory for the Study
of Earthquake Predictability (CSEP)
1
proposes a
methodology for rigorous scientific testing of these
many different models.
This testing happens mainly in the shape of dis-
tributed virtual laboratories (Nanjo et al., 2011). Mul-
tiple research groups will submit their forecast mod-
els. These models are be compared against future
earthquake event data using standardized testing pro-
tocols. The testing suite used in these comparisons
is made publicly available by the CSEP, so that re-
searchers can develop and test their models before-
hand.
In many application domains, the lack of an uni-
fied testing protocol means that comparing methods
developed by different research groups can be a great
burden. The CSEP framework allows us to objec-
tively and consistently compare our proposed algo-
rithms with previous approaches.
2.1 Earthquake Forecast Model
In the CSEP framework, a forecast exists in reference
to a geographical region, a start date and an end date.
The forecast will estimate the number (and sometimes
1
http://www.cseptesting.org
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
50

Figure 2: Target area for the Kanto region and its bins.
the magnitude) of earthquakes that happens in the tar-
get region during the target time interval.
A forecast is divided into bins. Each bin repre-
sents a non-overlapping geographical interval within
the target region, and sometimes also a magnitude in-
terval.
For example, in this paper we define the “Kanto”
region as as the area covered by latitude N34.8 to
N36.3, and longitude E138.8 to E140.3. This area is
divided into 2025 bins (a grid of 45x45 squares). Each
bin has an area of approximately 25km
2
(Figure 2).
For each bin in the forecast we define a number of
expected earthquakes. This number must be a positive
integer. A good forecast is one where the number of
estimated earthquakes in each bin corresponds to the
actual number of earthquakes that occurs in that bin
during the target time interval.
2.2 Comparison Testing
The CSEP framework uses six different tests to com-
pare earthquake forecasts. These are divided into two
groups: log-likelihood based tests, and alarm based
tests.
The first group is based on the analysis of the sim-
ilarity between the forecast and the actual earthquake
catalog, following the Regional Earthquake Likeli-
hood Model (RELM) (Schorlemmer et al., 2007). The
log likelihood of the forecast, given the actual data, is
calculated using a Poisson’s probability distribution.
From this data, three tests are defined. The L-test
compares the difference between the log-likelihood
of the forecast against the actual data, and the log-
likelihood of the forecast against itself. The N-test
tests whether the forecast is predicting too many or
too few events in total, and the R-test provides an al-
gorithm for the statistical testing of multiple forecasts
at once.
These tests require that all forecasts under com-
parison have the same number and size of bins. Also,
due to the way the log likelihood is calculated, they
pose a restriction on the forecast: if any one bin in the
forecast has zero earthquakes, while the correspond-
ing bin in the data has one or more events, the entire
forecast is discarded.
Alarm based tests, on the other hand, use a thresh-
old analysis (Zechar and Jordan, 2010). For a given
forecast a numerical threshold is decided: all bins
with forecast values above the threshold are added to
an alarm set. Earthquakes that fall in this alarm set are
counted as hits, while those falling outside the alarm
set are counted as misses. Alarm based tests rely on
two values: a miss rate v, the proportion of misses to
the total number of earthquakes; and the coverage rate
τ, the smallest alarm set necessary to achieve v.
Three alarm based tests are defined. The Molcham
Diagram draws a path of v and τ based on varying
values of the threshold. The Area Skill Score (ASS) is
defined as the area of the curve under the Molcham
diagram, and can be used to summarize the informa-
tion from the Molcham diagram as a single number.
Finally, a Receiver Operation Characteristic (ROC)
analysis can be done from v and τ. Alarm based tests
can compare forecasts with different bin sizes, but
they do not directly take into account the total number
of earthquakes on the forecast, or the data.
3 EVOLUTIONARY
COMPUTATION FOR
EARTHQUAKE RISK
ANALYSIS
Reports of the application of Evolutionary Computa-
tion and related methods for the generation of earth-
quake forecasts are rather sparse. One such approach
is described by Zhang and Wang (Zhang and Wang,
2012). They use Genetic Algorithms to fine tune an
Artificial Neural Network (ANN), and use this sys-
tem to produce a forecast. Unfortunately that paper
did not provide enough information to reproduce the
proposed GA+ANN system or their results. Zhou and
Zu (Zhou and Zhu, 2014) also recently proposed a
combination of ANN and EC, but their system only
forecasts the magnitude parameter of earthquakes.
On the other hand, there are quite a few works
using Evolutionary Computation methods for the es-
IsitPossibletoGenerateGoodEarthquakeRiskModelsUsingGeneticAlgorithms?
51

timation of parameter values in seismological mod-
els. These models are used to describe and understand
particular characteristics of earthquakes or earthquake
activity.
For example, there are many examples of us-
ing Evolutionary Computation to estimate the peak
ground acceleration of seismically active areas (Ker-
mani et al., 2009; Cabalar and Cevik, 2009; Kerh
et al., 2010). Ramos (Ramos and V
´
azques, 2011)
used Genetic Algorithms to decide the location of
sensing stations in a seismically active area in Mex-
ico. Nicknam et al. (Nicknam et al., 2010) and Ken-
nett and Sambridge (Kennet and Sambridge, 1992)
used evolutionary computation to determine the Fault
Model parameters (such as epicenter location, strike,
dip, etc) of a given earthquake.
4 A FORECAST MODEL USING
GENETIC ALGORITHMS
To investigate the ability of Evolutionary Computa-
tion to generate earthquake forecast models, we de-
sign and test a simple Genetic Algorithm. We call
this system the GAModel.
An individual’s genome in GAModel encodes a
forecast model as defined in the CSEP framework (see
Section 2.1). The population is trained on earthquake
occurrence data for a fixed training period, which is
anterior to the target test period. After the stopping
criterion is reached, the best individual is taken as the
final forecast.
By encoding the entire forecast as the genome of
one individual, we identify two concerns that must be
addressed by any EC-based approach: First, as fore-
cast models normally include a few thousand bins,
an individual’s genome will be correspondingly large.
Evolutionary operators and parameters must be cho-
sen to guarantee convergence in a reasonable time
frame.
Second, the design of the fitness function deserves
a lot of attention, to avoid the risk of over fitting the
system to the training data.
4.1 Genome Representation
In GAModel, each individual represents an entire
forecast model. The genome is a real valued array
X, where each element corresponds to one bin in the
desired model (the number of bins n is defined by the
problem). Each element x
i
∈ X takes a value from
[0,1). In the initial population, these values are sam-
pled from a uniform distribution.
In the CSEP framework, a model is defined as a set
of integer valued expectations, corresponding to the
number of earthquakes for each bin. To convert from
the real valued chromosome to a integer forecast, we
use a modification of the Poisson deviates extraction
algorithm from (Press et al., 2007) (Chapter 7.3.12).
Algorithm 1: Obtain a Poisson deviate from a [0,1)
value.
Parameters 0 ≤ x < 1,µ ≥ 0
L ← exp(−µ),k ← 0, prob ← 1
repeat
increment k
prob ← prob ∗ x
until prob > L
return k
In Algorithm 1, x is the real value taken from
the chromosome, and µ is the average number of
earthquakes observed across the entire training data.
Note that in the original algorithm, k − 1 is re-
turned. Because the log likelihood calculation used
for model comparison discards forecasts that estimate
zero events in bins where earthquakes are observed,
we modify the original algorithm to make sure all bins
estimate at least one event.
4.2 Fitness Function
Usually, the main challenge when applying an Evolu-
tionary Computation method to any new application
domain is the definition of an appropriate fitness func-
tion. Accordingly, a large part of our effort was used
to define a good fitness function for GAModel.
We describe two candidate fitness functions. The
first one is a direct application of the log likelihood
definition for earthquake forecast. Because this fit-
ness function resulted in an excessive amount of over
fitting, we describe a second fitness function that
breaks the training data set into smaller data sets in
order to avoid this problem.
4.2.1 Simple Log Likelihood Fitness Function
This fitness function uses the log-likelihood between
the forecast generated by an individual and the ob-
served earthquakes in the training data, as described
by Schorlemmer et al. (Schorlemmer et al., 2007). In
simple terms, the log likelihood is a measure of how
close a forecast is to a given data set.
Let Λ = {λ
1
,λ
2
,. .. ,λ
n
|λ
i
∈ N} be a forecast with
n bins. In this definition, λ
i
is the number of earth-
quakes that is forecast to happen in bin i. To derive
Λ
X
from an individual X = {x
1
,x
2
,. .. ,x
n
|0 ≤ x
i
< 1},
we calculate each λ
i
from x
i
using Algorithm 1.
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
52

Now, let Ω = {ω
1
,ω
2
,. .. ,ω
n
|ω
i
∈ N} be the ob-
served numbers of earthquakes for each bin i in the
training data. The log likelihood between an individ-
ual’s forecast Λ
X
and the observed data Ω is calcu-
lated as:
L(Λ
X
|Ω) =
n
∑
i=0
−λ
i
+ ω
i
∗ ln(λ
i
) − ln(ω
i
!) (1)
There are two special cases that arise when any λ
i
= 0.
If λ
i
= 0 and ω
i
= 0, then the value of the sum for that
element is 1. If ω
i
> 0, then L(Λ
X
|Ω) = −∞ and the
forecast must be discarded. For more details on this,
see (Schorlemmer et al., 2007).
In the Simple Log Likelihood fitness function, the
value of L(Λ
X
|Ω) is taken directly as the fitness value
of the individual.
Early testing with the Simple Log Likelihood
function showed that GAModel had a very strong ten-
dency to over fit to the training data. This is natural,
since there are differences between the seismicity of a
larger period and a shorter one. To solve this problem,
we used the fitness function shown in the next section.
4.2.2 Time-slice Log Likelihood Fitness
Function
In the time-slice log likelihood fitness function we
break up the training data set into smaller slices.
These slices are based on the chronology of the earth-
quakes contained in the training catalog. The duration
of each slice is the same as the duration of the target
interval (the test data).
Let’s consider an example: the target period for
the forecast is one year, from 1/1/2014 to 1/1/2015,
and the training data is taken from the 10 year pe-
riod between 1/1/2004 and 1/1/2014. To apply the
time-slice log likelihood fitness function, we divide
the training data into ten 1-year slices, from 2004 to
2005, 2005 to 2006, and so on.
When an individual X is evaluated, we calculate
the log likelihood of its forecast Λ
X
against each of
the time slices (Ω
2004
,Ω
2005
,. .. ,Ω
2013
). We use the
lowest log likelihood value from among all the slices
as the fitness value of X.
The idea behind this fitness function is that the cat-
alog data available for training will normally span a
period of time much longer than the desired forecast.
By breaking the training data into smaller periods, we
are trying to make the evolutionary algorithm learn
any time-repeating pattern that might exist in the data.
We choose the smallest log likelihood from the time
slices in order to make sure that the evolution process
favors solutions that try to solve all slices equally.
4.3 Evolutionary Operators and
Parameters
GAModel uses a regular generational genetic algo-
rithm. For selection, we use Elitism and Tournament
selection.
We use a simple Uniform Crossover for the
crossover operator. If a gene’s value falls outside the
[0,1) boundary, it is truncated to these limits. For
the mutation operator, we sample entirely new values
from [0,1) for each mutated chromosome.
Table 1: Parameters used in GAModel.
Population Size 500
Generation Number 100
Elite Size 1
Tournament Size 50
Crossover Chance 0.9
Mutation Chance (individual) 0.8
Mutation Chance (chromosome) (genome size)
−1
The parameters used for the evolutionary compu-
tation are described in Table 1. Because our focus is
to show the viability of Evolutionary Algorithms for
this application problem, we are not yet particularly
concerned with the convergence speed of the system.
Accordingly, not a lot of effort was spent fine tuning
these parameter values. These values were chosen in-
stead by trial and error on a data region not used in the
experiments of Section 5.1, until an acceptable con-
vergence time was found.
It would be very interesting to perform an ex-
tended effort into identifying the sensibility of each
parameter above to the current application domain.
For example, while in this work we are worried about
analyzing the influence of the fitness function in the
degree of over fitting in the results, a precise control
of the value for the tournament size parameter might
also have an effect in this regard.
5 EXPERIMENTS
To analyze the performance of the forecasts gener-
ated by the GAModel, we execute a simulation ex-
periment. In this simulation, the GAModel evolves
using a training data set, and the resulting forecast
is analyzed against a test data set. These results are
compared against two other forecasts: an “unskilled”
model, which randomly guesses the forecast (Fig-
ure 4), and a forecast generated by the Relative In-
tensity (RI) algorithm, regarded as a natural reference
for comparative tests with earthquake forecast mod-
els (Nanjo, 2011).
IsitPossibletoGenerateGoodEarthquakeRiskModelsUsingGeneticAlgorithms?
53

5.1 Experimental Data
The data used in these experiments comes from the
Japan Meteorological Agency’s (JMA) catalog. The
catalog lists earthquakes recorded by the sensing sta-
tion network in Japan. For each earthquake, the fol-
lowing values are given: time of occurrence, magni-
tude, latitude and longitude and depth of the hypocen-
ter.
To avoid issues related to the incompleteness of
the catalogue for very weak or very deep earthquakes,
we consider only events with magnitude above 2.5
and depth less than 100km. We consider earthquakes
recorded in the period between 2000 and 2013. This
accounts for more than 220.000 earthquakes in the
Japanese archipelago.
To achieve a better understanding of the forecast-
ing power of GA models, we define four areas (sce-
narios) to focus in our experiment. Figure 3 shows
where these four areas are located within Japan.
Three of these areas (Kanto, Touhoku and Kansai),
contain mainly inland earthquakes, which are con-
sidered to follow more stable patterns. The fourth
area (East Japan) includes also many off-shore earth-
quakes. To make it easier to compare the results for
each area, we choose the bin size so that the total
number of bins is within the same order of magnitude
in all areas.
1. Kanto: Kanto is the area at and nearby Tokyo.
There is a large amount of seismic activity in the
target period. In this study, we define this region
as starting at N34.8,W138.8, with 2025 bins ar-
ranged in a 45x45 grid. Each bin corresponds to a
square with 25km
2
.
2. Kansai: The Kansai area includes Kyoto, Osaka,
Kobe and nearby cities. This area shows a rela-
tively lower amount of seismic activity in the pe-
riod considered. We define this region as start-
ing at N34,W134.5, with 1600 bins arranged in
a 40x40 grid. Each bin corresponds to a 25km
2
square.
3. Touhoku: The Touhoku region is defined as the
northern provinces of the main island. It shows
some clusters of seismic activity during the pe-
riod studied. We define this region as starting at
N37.8,W139.8, with 800 bins arranged in a 40x20
grid. Each bin corresponds to a 100km
2
square.
4. East Japan: This area corresponds to Japan’s
north-eastern coast. It includes both inland and
off-shore events, which makes it more difficult to
forecast. It also includes the location of the M9
earthquake of 2011. We define this region as start-
ing at N37,W140, with 1600 bins arranged in a
Figure 3: The relative locations of the four areas used in our
experiments.
40x40 grid. Each bin corresponds to a 100km
2
square.
5.2 Experimental Design
To compare the performance of the different fore-
cast models, we execute a simulation experiment on
32 scenarios. A scenario is defined by a target re-
gion and a target time interval. The region is selected
from the four regions described in the previous sec-
tion. The time interval is a one year interval, lasting
from Jan/01 to Dec/31. We consider 8 periods (from
2005 to 2012). In each period, we use 5 years of prior
data (2000 to 2011) to train the RI and GAM algo-
rithms.
For each scenario, we generate forecasts for the
random model, the GAM model (using the second
fitness function described in this paper) and the RI
model. The random forecast is generated by selecting
a random uniform value between 0 and 1 for each bin,
and transforming this value into an integer using Al-
gorithm 1. The RI forecast is generated according to
Section 5.3.
Both the GAModel and the RI algorithm require
a training data set. For each scenario, we use earth-
quake data from the 5 year period immediately prior
to the testing period. In order to test the statistical
significance of our results, we run the GAModel 20
times, and obtain 20 forecasts. All GAModel results,
unless noted otherwise, are the mean of these 20 runs.
Because the RI algorithm is not stochastic, the result
of a single run is reported.
The results are compared in mainly two ways. We
report the log likelihood values for the three methods.
The log likelihood indicates how close the forecast
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
54

Figure 4: A random forecast (Kansai Region, 2007).
is to the test data, in terms of location and quantity
of earthquakes. We also report the Area Skill Score
(ASS) for the three methods. The ASS is the area
covered by the “Alarm rate x Miss rate” curve of the
forecast (see Section 2.2 for details). In both cases, a
higher value indicates a more skilled model.
5.3 The Relative Intensity Algorithm
The Relative Intensity (RI) algorithm is a commonly
used benchmark for earthquake forecasting models.
In this experiment, we use it as goalpost to assess the
suitability of evolutionary computation for earthquake
forecasting.
The working assumption behind the RI is that
larger earthquakes are more likely to occur at loca-
tions of high seismicity in the past. Accordingly,
the RI algorithm will estimate the number of earth-
quakes in a bin based on the number of earthquakes
observed in the past for that bin. This estimate will be
“smoothed” by an attenuation factor s that takes into
account the seismicity of neighboring bins.
We use the implementation described by Nanjo
in (Nanjo, 2011). Please refer to that paper for im-
plementation details. The parameters used for the
RI algorithm in these experiments are: b = 0.8 and
s = 50km. These values were selected by taking the
suggested range of values recommended in (Nanjo,
2011), and finding the best values in this range on the
same data set used to tune the parameters of the Ge-
netic Algorithm.
5.4 Comparison of Forecast Models
The results of the simulation experiments are summa-
rized in Table 2. In this table, Random refers to the
Random forecast, RI to the Relative Intensity algo-
rithm, and GA to the GAModel.
The GA column reports the average for 20 runs,
and the standard deviation is reported in parenthesis.
The p-value column indicates the result of an one-
sided T-test of the GA’s mean against the value ob-
tained from the RI algorithm.
Looking at the table, we observe that the
GAModel has generally outperformed the RI on the
“Kanto” area. Figures 5(c) and 5(d) illustrate the rea-
son: Generally, GAModel is able to detect smaller
earthquake clusters inland, while RI smooths them
out.
Even then, both models miss some clusters in this
area, as indicated by their ASS value being under the
value of the random model. The ASS value is useful
to estimate how much a forecast is suffering from over
fitting - a low value indicates that a larger alarm area
is necessary to reduce the miss rate of the forecast.
The “Touhoku” area shows a similar situation as
the “Kanto” area. In Figures 5(a) and 5(b) we can
see that GAModel is able to identify the two earth-
quake clusters more precisely, while the RI algorithm
casts a wide net which reduces the forecast accuracy.
The ASS score for this area is higher. This is because
both methods are able to learn the two “hot spots” for
seismic activity, unlike the Kanto area where some
clusters would appear in different locations along the
years.
Conversely, in the “East Japan” area the RI algo-
rithm performed better than the GAModel. The rea-
son seems to be that off-shore seismicity, which is
spread over a larger area than inland events, is better
captured by the wide smoothing step of the RI algo-
rithm.
In all three cases, we can see that the results
changed wildly in the aftermath of the 2011 M9 earth-
quake. That earthquake caused a sudden large spike
of seismic activity in all areas (Figure 1), includ-
ing many areas that never showed any seismic ac-
tivity during the training period. In the following
scenario (2012), both methods try to use this new
data to reform their forecasts. Again, GAModel per-
forms better in the “Touhoku/2012” scenario, where
most earthquakes are inland. The RI method per-
forms better in the “Kanto/2012” scenario, where
most of the new seismicity occurs off-shore (Fig-
ures 5(e) and 5(f)).
The “Kansai” scenarios turned out to be a special
situation for both algorithms. The seismic activity in
that area for the period was too sparse. Since both
the RI and GAModel depend on the analysis of re-
cent earthquakes, neither algorithm could produce a
reliable forecast. In the case of the RI, the forecast
IsitPossibletoGenerateGoodEarthquakeRiskModelsUsingGeneticAlgorithms?
55
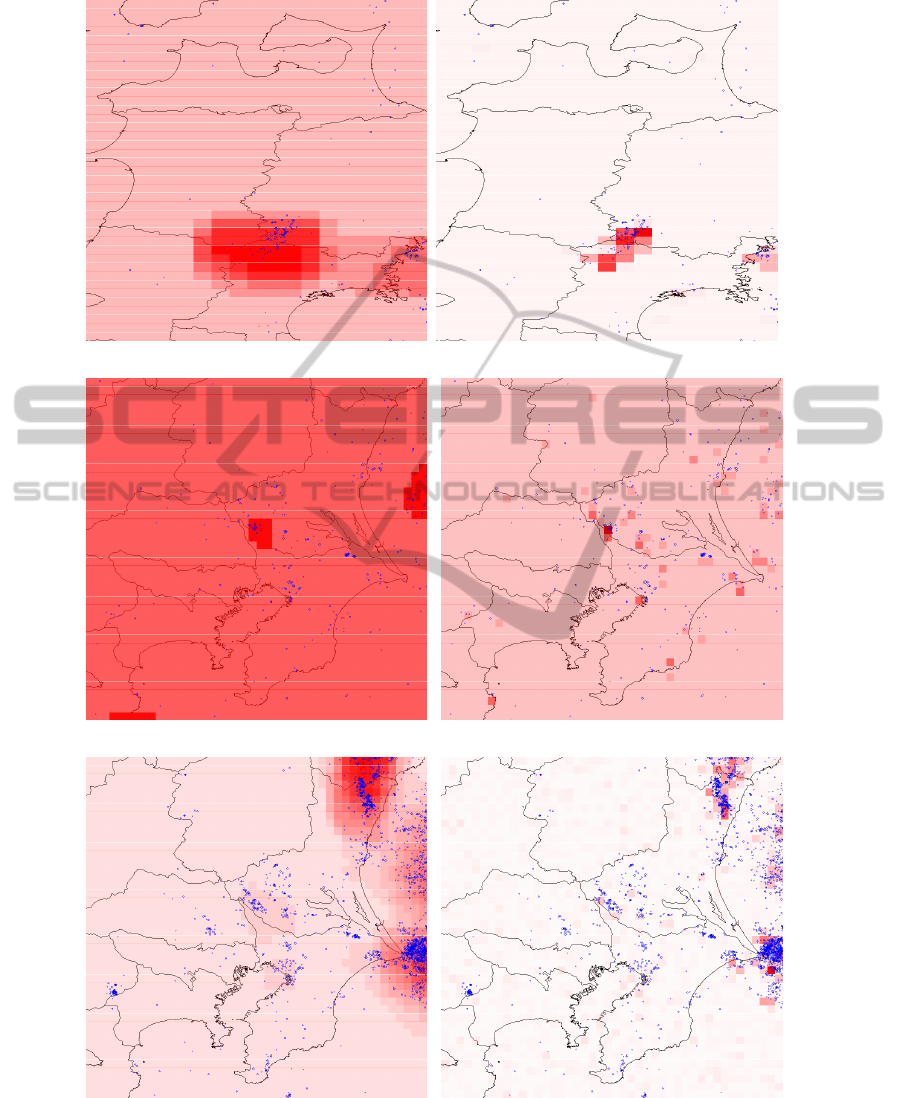
(a) Touhoku 2009, RI forecast (b) Touhoku 2009, GA forecast
(c) Kanto 2010, RI forecast (d) Kanto 2010, GA forecast
(e) Kanto 2012, RI forecast (f) Kanto 2012, GA forecast
Figure 5: Some forecast images for the RI algorithm and the GAModel. Red squares indicate the intensity of the forecast.
Blue circles indicate actual earthquakes in the test data. Note that the intensity of the red color indicates relative values in
the forecast. In other words, uniform forecasts will tend to appear as a darker red color than forecasts with a bigger range of
values.
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
56
Table 2: Results from the simulation experiments. The parenthesis after the GA values are the standard deviation (average of
20 runs). The two “p-value” columns report the significance of the t-test comparing the GA mean against the result from the
RI algorithm. For the sake of legibility, p-values under 0.01 are reported as 0.01.
Scenario Log Likelihood Area Skill Score
Random RI GA p-value Random RI GA p-value
Kanto 2005 -3716.86 -2263.4 -2253.2 (16.5) 0.01 0.38 0.24 0.24 (0.04) 0.78
2006 -3884.85 -2252.28 -2234.72 (14) 0.01 0.36 0.10 0.18 (0.01) 0.01
2007 -3838.9 -2113.84 -2108.95 (11.1) 0.03 0.36 0.15 0.19 (0.02) 0.01
2008 -3914.54 -2110.79 -2096.75 (11.8) 0.01 0.39 0.16 0.22 (0.03) 0.01
2009 -4211.28 -2487.88 -2482.88 (10.3) 0.02 0.36 0.09 0.14 (0.01) 0.01
2010 -4010.47 -2132.11 -2099.13 (16.3) 0.01 0.39 0.14 0.28 (0.03) 0.01
2011 -17657.43 -20083.09 -19983.73 (144.4) 0.01 0.35 0.07 0.08 (0.02) 0.14
2012 -10863.99 -3225.39 -4435.34 (248) 1.00 0.48 0.80 0.77 (0.01) 1.00
Kansai 2005 -2219.06 -1605 -1631.96 (26) 0.99 0.24 0 0.07 (0.02) 0.01
2006 -2172.29 -1606 -1631.19 (23.9) 0.99 0.23 0 0.05 (0.01) 0.01
2007 -2024.77 -1615 -1617.01 (2.3) 0.99 0.22 0 0.03 (0.01) 0.01
2008 -2038.16 -1608 -1610.41 (1.54) 1.00 0.22 0 0.01 (0.01) 0.01
2009 -2054.23 -1618 -1619.51 (2.58) 0.99 0.21 0 0.02 (0.01) 0.01
2010 -2054.63 -1613 -1611.00 (2.27) 0.01 0.27 0 0.07 (0.02) 0.01
2011 -2059.89 -1625 -1625.12 (2.46) 0.58 0.26 0 0.05 (0.03) 0.01
2012 -2080.35 -1601 -1603.59 (2.92) 0.99 0.22 0 0.04 (0.02) 0.01
Touhoku 2005 -2552.61 -1067.38 -984.23 (84) 0.01 0.58 0.58 0.62 (0.01) 0.01
2006 -2613.1 -1044.72 -1073.03 (154) 0.78 0.52 0.50 0.42 (0.03) 1.00
2007 -2666.11 -1049.82 -999.64 (83.6) 0.01 0.51 0.51 0.41 (0.01) 1.00
2008 -5124.54 -5007.49 -4704.15 (131) 0.01 0.36 0.05 0.18 (0.01) 0.01
2009 -2737.47 -1049.22 -936.63 (60) 0.01 0.54 0.67 0.70 (0.01) 0.01
2010 -2714.68 -1045.03 -1077.95 (136) 0.85 0.53 0.66 0.57 (0.01) 1.00
2011 -3435.67 -2753.95 -2963.31 (88) 1.00 0.40 0.21 0.10 (0.01) 1.00
2012 -3623.22 -1326.52 -1186.1 (45.3) 0.01 0.47 0.62 0.70 (0.05) 0.01
East Japan 2005 -2666.11 -1049.82 -868.87 (20) 0.01 0.47 0.35 0.30 (0.02) 1.00
2006 -6596.76 -2130.69 -2303.78 (98) 1.00 0.46 0.42 0.35 (0.01) 1.00
2007 -6714.36 -1997.78 -2065.4 (85) 0.99 0.43 0.51 0.34 (0.02) 1.00
2008 -8784.64 -6087.88 -6097.63 (264) 0.56 0.46 0.23 0.20 (0.03) 1.00
2009 -6435.07 -2052.35 -1964.72 (106) 0.01 0.47 0.49 0.48 (0.02) 0.99
2010 -6560.97 -2572.97 -2541.33 (121) 0.12 0.46 0.41 0.31 (0.01) 1.00
2011 -31447.79 -47704.35 -51485.77 (536) 1.00 0.44 0.40 0.18 (0.01) 1.00
2012 -19068.86 -5177.55 -6657.52 (478) 1.00 0.50 0.77 0.71 (0.01) 1.00
produced was largely a uniform forecast, where all
bins had equal or very close expectation values. In
the case of GAModel, A few bins where earthquakes
had happened in the training data were marked with
higher forecasts, but no consistent activity clusters
were identified. The log likelihood or ASS scores for
these scenarios cannot really be used to compare the
two methods.
6 CONCLUSION
Our goal in this work was to open the discussion
about the feasibility of Evolutionary Computation
approaches for the important problem of generat-
ing earthquake forecast models. The mechanisms of
earthquake generation are still not fully understood,
which motivates us to use self-adaptive methods such
as Genetic Algorithms.
To illustrate our proposal, we designed GAModel,
a traditional GA with an specific fitness function that
generates an earthquake forecast based on recent seis-
mic history. We performed simulation experiments
and compared the results with the RI method, which
is accepted in the seismology community as a natural
benchmark.
Our results show that the GAModel is competi-
tive with the RI algorithm, outperforming it in scenar-
ios with a predominance of in-land earthquakes, and
being outperformed when there is a large number of
off-shore earthquakes. In this sense, we feel that the
answer to the question posed by the title of the paper
should be “Yes, it is promising to use EC to generate
earthquake forecasts”.
That said, we have also identified many places
where an Evolutionary forecast generator could be
improved. Although the time-slice fitness function
was designed to reduce over fitting, we still see that
IsitPossibletoGenerateGoodEarthquakeRiskModelsUsingGeneticAlgorithms?
57

GAModel generates “sharp” forecasts that are proba-
bly the result of some degree of over fitting.
In this paper, we have decided to focus on the in-
troduction of this new problem domain to the evo-
lutionary computation community. Therefore, we
limited ourselves to the traditional GA. However,
we visualize many possible research directions based
on the shortcomings demonstrated in the current re-
search.
One way to mitigate the sharpness noticed in the
results is by making the algorithm aware of data lo-
cality. Based on the smoothing pattern in the RI al-
gorithm, we plan to develop a self-adaptive way to
smooth the results in the GAM. Also, because in the
RELM each bin is ultimately evaluated independently
of the neighboring bins, it is feasible to imagine that
separate areas in a forecast model could be generated
by using different parameters, or different algorithm
variations altogether.
Finally, we currently only use historical data to
build the forecast model. We are very interested in
finding ways to add domain knowledge into the sys-
tem, such as the location of known faults, in order to
improve the forecast ability.
ACKNOWLEDGEMENTS
We would like to thank the Japan Meteorological
Agency for the earthquake catalog used in this study.
REFERENCES
Aranha, C. and Enescu, B. (2014). A study on the viability
of evolution methods for the generation of earthquake
predictability models. In The 28th annual conference
of the Japan Society on Artificial Intelligence.
Cabalar, A. F. and Cevik, A. (2009). Genetic programming-
based attenuation relationship: An application of re-
cent earthquakes in Turkey. Computers and Geo-
sciences, 35:1884–1896.
Kennet, B. L. N. and Sambridge, M. S. (1992). Earthquake
location genetic algorithms for teleseisms. Physics of
the Earth and Planetary Interiors, 75(1–3):103–110.
Kerh, T., Gunaratnam, D., and Chan, Y. (2010). Neural
computing with genetic algorithm in evaluating poten-
tially hazardous metropolitan areas result from earth-
quake. Neural Comput. Appl., 19(4):521–529.
Kermani, E., Jafarian, Y., and Baziar, M. H. (2009). New
predictive models for the v
max
/a
max
ratio of strong
ground motions using genetic programming. Interna-
tional Journal of Civil Engineering, 7(4):236–247.
Koza, J. R., Keane, M. A., and Streeter, M. J. (2003).
What’s AI done for me lately? Genetic program-
ming’s human-competitive results. IEEE Intelligent
Systems, 18(3):25–31.
Nanjo, K. Z. (2011). Earthquake forecasts for the CSEP
Japan experiment based on the RI algorithm. Earth
Planets Space, 63:261–274.
Nanjo, K. Z., Tsuruoka, H., Hirata, N., and Jordan, T. H.
(2011). Overview of the first earthquake forecast
testing experiment in Japan. Earth Planets Space,
63:159–169.
Nicknam, A., Abbasnia, R., Eslamian, Y., Bozorgnasab, M.,
and Mosabbeb, E. A. (2010). Source parameters esti-
mation of 2003 Bam earthquake Mw 6.5 using empiri-
cal Green’s function method, based on an evolutionary
approach. J. Earth Syst. Sci., 119(3):383–396.
Press, W. H., Teukolsky, S. A., Vetterling, W. T., and Flan-
nery, B. P. (2007). Numerical Recipes, The Art of Sci-
entific Computing. Cambridge University Press, third
edition.
Ramos, J. I. E. and V
´
azques, R. A. (2011). Locat-
ing seismic-sense stations through genetic algorithms.
In Proceedings of the GECCO’11, pages 941–948,
Dublin, Ireland. ACM.
Saegusa, A. (1999). Japan tries to understand quakes, not
predict them. Nature, 397:284–284.
Schorlemmer, D., Gerstenberger, M., Wiemer, S., Jackson,
D., and Rhoades, D. A. (2007). Earthquake likeli-
hood model testing. Seismological Research Letters,
78(1):17–29.
Zechar, J. D. and Jordan, T. H. (2010). The area skill
score statistic for evaluating earthquake predictability
experiments. Pure and Applied Geophysics, 167(8–
9):893–906.
Zhang, Q. and Wang, C. (2012). Using genetic algorithms
to optimize artificial neural network: a case study
on earthquake prediction. In Second International
Conference on Genetic and Evolutionary Computing,
pages 128–131. IEEE.
Zhou, F. and Zhu, X. (2014). Earthquake prediction based
on LM-BP neural network. In Liu, X. and Ye, Y., edi-
tors, Proceedings of the 9th International Symposium
on Linear Drives for Industry Applications, Volume 1,
volume 270 of Lecture Notes in Electrical Engineer-
ing, pages 13–20. Springer Berlin Heidelberg.
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
58
