
Answering Natural Language Queries about
Rehabilitation Robotics Ontology on the Cloud
Zeynep Dogmus, Volkan Patoglu and Esra Erdem
Faculty of Engineering and Natural Sciences, Sabancı University, Istanbul, Turkey
Keywords:
Rehabilitation Robotics, Query Answering, Natural Language, Ontologies.
Abstract:
We introduce a novel method to answer natural language queries about rehabilitation robotics, over the formal
ontology REHABROBO-ONTO. For that, 1) we design and develop a novel controlled natural language for
rehabilitation robotics, called REHABROBO-CNL; 2) we introduce translations of queries in REHABROBO-
CNL into SPARQL queries, utilizing a novel concept of query description trees and description logics concepts;
3) we use an automated reasoner to find an answer to the SPARQL query. To facilitate the use of our method
by experts, we develop an intelligent, interactive query answering system, using Semantic Web technologies,
and make it available on the cloud via Amazon web services. This interface guides the users to express their
queries in natural language and displays the answers to queries in a readable format, possibly with links to
detailed information. Easy access to information on REHABROBO-ONTO through complex queries in natural
language may help engineers inspire new rehabilitation robot designs, while also guiding practitioners to make
more informed decisions on technology based rehabilitation.
1 INTRODUCTION
Recently, the first formal ontology about rehabilita-
tion robotics, called REHABROBO-ONTO, has been
designed and developed in OWL (Web Ontology
Language) (Horrocks et al., 2003; Antoniou and
van Harmelen, 2004), and made available on the
cloud (Dogmus et al., 2013; Dogmus et al., 2012), to
facilitate access to various kinds of information about
the existing robots. Also this effort of having a struc-
tured representation of information about rehabilita-
tion robotics is inline with the standardization efforts
of by European Network on Robotics for Neuroreha-
bilitation,
1
and IEEE-RAS Ontologies for Robotics
and Automation Working Group.
2
Such a formal ontology allows rehabilitation
robotics researchers to learn various properties of
the existing robots and access to the related publica-
tions to further improve the state-of-the-art. Physi-
cal medicine experts also can find information about
rehabilitation robots and related publications to bet-
ter identify the right robot for a particular therapy
or patient population. Such requested information
can be obtained from REHABROBO-ONTO by ex-
1
http://www.rehabilitationrobotics.eu/
2
http://www.ieee-ras.org/industrial/standards.html
pressing the requested information as a formal query
in a query language, such as SPARQL (PrudHom-
meaux et al., 2008), and then by computing answers
to these queries by using a state-of-the-art automated
reasoner, such as PELLET (Sirin et al., 2007). How-
ever, expressing the requested information as a for-
mal query by means of formulas is challenging for
many users, including robot designers and physical
medicine experts.
This paper is concerned about the process of query
answering over REHABROBO-ONTO, and making it
easier for the users to express their queries in a nat-
ural language and to obtain answers to their queries
automatically. By this way, the users are not required
to be familiar with the underlying formal query lan-
guage, Semantic Web technologies, or automated rea-
soners. Easy access to information on REHABROBO-
ONTO through complex queries may help engineers
inspire new rehabilitation robot designs, while also
guiding practitioners to make more informed deci-
sions on technology based rehabilitation.
Our contributions can be summarized as follows.
First, we design and develop a novel controlled
natural language for rehabilitation robotics, called
REHABROBO-CNL, to express queries. We intro-
duce a method of translating natural language queries
in REHABROBO-CNL into formal SPARQL queries.
75
Dogmus Z., Patoglu V. and Erdem E..
Answering Natural Language Queries about Rehabilitation Robotics Ontology on the Cloud.
DOI: 10.5220/0005081400750083
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2014), pages 75-83
ISBN: 978-989-758-049-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

This translation utilizes two intermediate representa-
tions: a novel tree structure, called a Query Descrip-
tion Tree (QDT), and Description Logics (DL) con-
cepts. Once the natural language query is transformed
into a formal query, we use PELLET to find answers
to the query. To guide the users throughout the whole
process of expressing queries in REHABROBO-CNL,
and to show the computed answers to them in an un-
derstandable way, we also design and develop an in-
teractive, intelligent user interface. The overall sys-
tem is made available on the cloud via Amazon Elas-
tic Compute Cloud (Amazon EC2)
3
—a web service
that provides resizable compute capacity in the cloud,
and makes web-scale computing easier for develop-
ers.
2 REHABROBO-CNL: A
CONTROLLED NATURAL
LANGUAGE FOR
REHABILITATION ROBOTICS
Reasoning over REHABROBO-ONTO is done by
means of answering questions posed by the user in
natural language. To overcome the ambiguities in the
vocabulary and grammar of natural languages, we in-
troduce a Controlled Natural Language (CNL), a sub-
set of a natural language with a restricted vocabulary
and grammar. A CNL is essentially formal language,
and thus it is not difficult to convert a CNL to a logic-
based formalism. In that sense, a CNL facilitates the
use of automated reasoners to find answers to queries
expressed in a CNL.
In order to express queries about rehabilitation
robots, we designed and developed a new CNL,
called REHABROBO-CNL. Although we designed
REHABROBO-CNL considering REHABROBO-
ONTO, it is possible to expand it to support queries
about integrated knowledge resources (e.g., patients,
diseases, genetic information). Some example
queries in REHABROBO-CNL are listed below:
• What are the robots that target some wrist move-
ments with actuation=’series elastic’?
• What are the effort metrics that are evaluated by
some robots with active degree of freedom ≥ 2?
• What are the publications with clinical study and
that reference some robots with active degree of
freedom ≥ 2?
With REHABROBO-CNL, it is possible to con-
struct queries that contain nested relative clauses,
3
http://aws.amazon.com/ec2/
disjunctions, conjunctions, negations, and quantifica-
tions; such as some, all, any, none.
To eliminate the ambiguities in nesting of con-
junctions and disjunctions, REHABROBO-CNL pro-
vides two ways of constructing a query: A query in
REHABROBO-CNL should either be in Conjunctive
Normal Form (CNF), or in Disjunctive Normal Form
(DNF). In other words, REHABROBO-CNL supports
conjunctions of simple disjunctions, and disjunctions
of simple conjunctions. An example of a query in
CNF is as follows.
What are the robots with mechanism
type=’hybrid’ and (with motion capability
=’grounded’ or with functionality=’clinic’)
and that target some wrist movements?
The part of the grammar of REHABROBO-CNL that
describes this query is shown in Table 1. The italic
functions in the grammar are used to extract relevant
information from REHABROBO-ONTO. These ontol-
ogy functions are described in Table 2.
The information extracted with the ontology func-
tions are coupled by their relevance. For instance,
only the verb “reference” can appear after the type
Publications. By matching types with verbs, it is
possible to prevent semantically wrong queries like
“What are the publications that target some shoul-
der movements?”. Similarly, it is necessary to match
verbs with types.
In addition to types and verbs, types are matched
with the relevant nouns. For instance, control modes
are matched with robots whereas actuation is matched
with movements. Further, the values for the nouns are
extracted to allow suitable entries from the users. The
values can be considered as ranges of the nouns, that
the user can choose from.
3 TRANSLATING QUERIES
FROM REHABROBO-CNL INTO
SPARQL
To answer a query in REHABROBO-CNL using auto-
mated reasoners, we transform the query into the for-
mal query language SPARQL with the following steps.
1. We parse the query as a tree.
2. We traverse the tree and obtain a description log-
ics (DL) concept description.
3. We transform the DL concept into a SPARQL con-
cept.
4. We form a SPARQL query.
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
76

Table 1: The Grammar of REHABROBO-CNL.
QUERY → WHATQUERY QUESTIONMARK
WHATQUERY → What are the Type() GENERALRELATION
GENERALRELATION → SIMPLERELATION NESTEDRELATION
∗
SIMPLERELATION → (that RELATIVECLAUSE)+
SIMPLERELATION → WITHRELATION
NESTEDRELATION → (and ((LP SIMPLEDISJUNCTION RP) — SIMPLECONJUNCTION))
∗
SIMPLEDISJUNCTION → (SIMPLERELATION or)
∗
SIMPLERELATION
SIMPLECONJUNCTION → (SIMPLERELATION and)
∗
SIMPLERELATION
RELATIVECLAUSE → Verb() (some | all | the) Type()
WITHRELATION → with Noun() EQCHECK Value()+
QUESTIONMARK → ?
Table 2: The Ontology Functions.
Type() Returns the types that correspond to concept names. They are: Robots, movements, users, publica-
tions and metrics.
Verb() Returns the verbs that correspond to object properties between concepts. Returns both active and
passive forms of these verbs. Active forms of these verbs are: Target, evaluate, reference, own.
Parsing a Query. To parse a REHABROBO-CNL
query, we introduce the concept of a Query Descrip-
tion Tree (QDT). A QDT is a rooted, directed tree that
consists of five types of nodes:
• root-node: Represents the sort of the query.
• that-node: Represents a relative clause beginning
with “that”.
• with-node: Represents a relative clause beginning
with “with”.
• and-node: Represents a conjunction.
• or-node: Represents a disjunction.
Every root/that/with-node characterizes a phrase
and a type/instance. An and/or-node cannot be a leaf.
For each path from the root node to a leaf node, there
can be at most one and-node and one or-node. With-
nodes are leaves only. That-node has one child only.
Consider, for instance, the QDT in Figure 1 for
the query: “What are the robots that target some
shoulder movements with actuation=’electrical’ and
(with transmission=’cable drive’ or with transmis-
sion=’direct drive’)?” The root denotes the beginning
of the query “What are the robots...”. According to
the root, the answer to the query will contain robot
names only. Since the query is about robots, the type
contained in the root is “robot”.
The relative clause about these robots is the child
of the root. Since this relative clause starts with
“that”, it is a that-node; the type contained in this node
is “shoulder movement”.
The query continues with a conjunction of two
relative clauses. Clauses joined with a conjunction
(resp., disjunction) are characterized by an and-node
(resp., or-node) as their parent.
One of conjoined the relative clauses starts with
“with”, so it is a with-node. The other relative clause
is a simple disjunction, so it is an or-node. It disjoins
two clauses, each starting with “with”; so it has two
children that are with-nodes. The with-nodes include
values of properties instead of types.
From QDT to a DL Concept. The tree represent-
ing the query, in fact, represents a concept. While
creating a query, we define a new concept and search
for its instances. Retrieved instances that fit our de-
scription are the answers to our query.
By a depth-first traversal of a QDT, we repre-
sent the corresponding concept in Description Logics
(DL) as described in Algorithm 1. For instance, for
the QDT in Figure 1, the algorithm returns the fol-
lowing concept:
Robot u ∃targets.ShoulderMovementsu
∃actuation.{electrical}u
(∃transmission.{cabledrive}t
∃transmission.{directdrive}).
It starts from the root node. Since the associated
class of the node is “robot”, our concept descrip-
tion starts with Robot. The child of the root is
an and-node, so the algorithm calls trans f orm re-
cursively for each grandchild of the root node and
conjoins the results by u. For the that-node, the
algorithm calls trans f ormT hatNode (Algorithm 2).
The that-node has no child, it involves the quanti-
fier “some” over its associated class “shoulder move-
ments”. Therefore, trans f ormThatNode returns the
AnsweringNaturalLanguageQueriesaboutRehabilitationRoboticsOntologyontheCloud
77

root-node
that-node
with-node
“What are the robots”
“that target some shoulder movements”
“with actuation=’electrical’ ”
and-node
or-node
with-node
“with transmission=’cable drive’ ”
with-node
“with transmission=’direct drive’ ”
Figure 1: Tree representation of the sample query.
concept ∃targets.ShoulderMovements. For the
grandchild with-node of the root, since it is about
a functional property which has a specific value,
trans f ormWithNode (Algorithm 3) returns the con-
cept ∃actuation.{electrical}. In a similar way,
the depth-first traversal of the or-node returns the last
two lines above.
From a DL Concept to a SPARQL Concept. To ob-
tain a SPARQL concept from a DL concept, we uti-
lize some of the existing translations in related publi-
cations, such as (Orsi, 2011) and (Fernandes, 2009).
We also introduce some novel transformations. Some
transformation examples are shown in Table 3. The
transformations without a citation are the novel trans-
formations.
Consider the inverse role transformation in Ta-
ble 3. DL representation of this concept corresponds
to the first-order formula, ∃x.targets(x, y)∧ Robot(x),
which expresses that “there exists a robot x that tar-
gets a movement y”. Our transformation to SPARQL
includes two triples, having a common variable x.
The variable x should satisfy two conditions: it must
be a robot and it must target a movement y. Accord-
ing to the semantics of AND operator (denoted with a
dot) (P
´
erez et al., 2006), the result contains the map-
pings of x and y to the nodes in the ontology, that
agree on the nodes that correspond to x. This corre-
sponds to the existential restriction in the first-order
formula, that should satisfy two conditions combined
with a conjunction. Therefore, evaluations of the DL
concept and the SPARQL concept return the same re-
sult.
Consider the complement transformation in Ta-
ble 3. DL representation of this concept contains a
Algorithm 1: transform.
Input : A tree T representing the concept that
the user described
Output: A DL concept description Q that
represents the concept in T
// n.class denotes associated class of node n
// n.children denotes children of node n
Q ←
/
0;
n ← first (root) node in T ;
if n is a root-node then
Q ← Q u n.class;
foreach child node c ∈ n.children do
Q ← Q utrans f orm(c);
else if n is a that-node then
Q ← Q utrans f ormT hatNode(n);
else if n is a with-node then
Q ← Q utrans f ormWithNode(n);
else if n is an and-node OR n is an or-node then
tempQ ←
/
0;
foreach child node c ∈ n.children do
if n is an and-node then
tempQ ← tempQ u trans f orm(c);
else
tempQ ← tempQ t trans f orm(c);
Q ← Q u (tempQ);
return Q
negated existential quantifier. SPARQL transformation
contains a triple covered with FILTER NOT EXISTS.
The triple searches for a mapping of variable x to a
node, that is related to another node AssistOn with
an edge that characterizes has Name relation. This
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
78

Table 3: DL to SPARQL Transformation Examples.
Constructor DL SPARQL
Concept (Fernandes, 2009) Robot ?x rdf:type ns:RehabRobots.
Role (Orsi, 2011) targets ?x ns:targets ?y.
Complement ¬∃name.{AssistOn}
FILTER NOT EXISTS {
?x ns:has Name ’AssistOn’.
}
Inverse Role ∃targets
−
.Robot
?x ns:targets ?y.
?x rdf:type ns:RehabRobots.
Existential Restriction (Orsi, 2011) ∃targets.ShoulderMovements
?x ns:targets ?y.
?y rdf:type ns:ShoulderMovements.
hasValue Restriction (Orsi, 2011) ∃name.{AssistOn} ?x ns:has Name ’AssistOn’.
Universal Restriction ∀reference.Robot
?x rr:reference ?y.
?y rdf:type rr:RehabRobots.
FILTER NOT EXISTS {
FILTER NOT EXISTS {
?x rr:reference ?y2.}
?y2 rdf:type rr:RehabRobots.}
Intersection (Fernandes, 2009) Robot u ∃functionality.{clinic}
?x rdf:type ns:RehabRobots.
?x ns:has Functionality ’clinic’.
Union (Fernandes, 2009)
∃functionality.{clinic}t
∃motionCapability.{grounded}
{?x ns:has Functionality ’clinic’.}
UNION
{?x ns:has Motion Capability ’grounded’.}
corresponds to an existential restriction. However, we
do not want such mappings of x. According to the se-
mantics of NOT EXISTS in a filter expression (P
´
erez
et al., 2006), FILTER NOT EXISTS {C} is satisfied if
the mapping of C is an empty set. Therefore, there
should not be any mapping of the variables in C to
a node in the ontology. The result that is returned
from our SPARQL concept does not contain any node
that satisfies the condition in the triple, and that corre-
sponds to a negated existential restriction: all x must
not have name AssistOn. Therefore, evaluations of
the DL concept and the SPARQL concept return the
same result.
Finally, consider the universal restriction example
in Table 3. DL description of this concept represents
the publications that reference all robots, and for that,
it contains a universal quantifier. To represent this
concept with SPARQL we need to describe such pub-
lications by making sure that there is no robot in the
ontology that is not referenced by that publication. To
describe such publications in SPARQL we use an ex-
pression constructed with two FILTER NOT EXISTS.
Since a universal restriction such as ∀xA(x) corre-
sponds to a negated existential restriction ¬∃x¬A(x),
each FILTER NOT EXISTS operator in the SPARQL
query corresponds to a negation.
By applying these transformations, the DL con-
cept that is obtained from the QDT in Figure 1
Robot u ∃targets.ShoulderMovementsu
∃actuation.{electrical}u
(∃transmission.{cabledrive}t
∃transmission.{directdrive}).
is transformed into the following SPARQL concept:
?robot1 rdf:type rr:RehabRobots.
?robot1 rr:targets ?movement1.
?movement1 rdf:type rr:ShoulderMovements.
?movement1 rr:has_Actuation ’electrical’.
{?movement1 rr:has_Transmission ’cable drive’.}
UNION
{?movement1 rr:has_Transmission ’direct drive’.}
Note that these transformations are necessitated
by some queries supported by our approach, that in-
volve negation (e.g., publications that do not refer-
ence any robots with motion capability = ‘grounded’),
passive verbs (e.g., movements that are targeted by
robots), and universal quantifiers (e.g., robots that tar-
get all foot movements).
Obtaining a SPARQL Query. After we transform a
DL concept into a SPARQL concept, we can construct
AnsweringNaturalLanguageQueriesaboutRehabilitationRoboticsOntologyontheCloud
79

Algorithm 2: transformThatNode.
Input : A that-node n
Output: A DL concept description Q that
represents the concept in n
// n.class denotes associated class of node n
// n.verb denotes associated verb of node n
// n.negative denotes the negativity of node n
// n.quanti f ier denotes the quantifier of node n
// n.instance denotes the instance of node n, if
exists
// n.child denotes child of node n
// n.class.identi f ierNoun denotes the noun that
identifies n.class
Q ←
/
0;
childQ ←
/
0;
if n.child is not empty then
childQ ← trans f orm(n.child);
else if n includes an instance then
childQ ←
∃(n.class.identi f ierNoun).{n.instance};
if n.quanti f ier = ALL then
if n.verb is passive then
Q ←
Q u ∀(n.verb)
−
.((n.class) u childQ);
else
Q ←
Q u ∀(n.verb).((n.class) u childQ);
else
// If there is no quantifier or the quantifier is
SOME
if n.verb is passive then
Q ←
Q u ∃(n.verb)
−
.((n.class) u childQ);
else
Q ←
Q u ∃(n.verb).((n.class) u childQ);
if n.negative = True then
Q ← ¬Q;
return Q
a SPARQL query as follows. We start with a PREFIX
part and we declare the namespace (the location of an
ontology on the Web) of REHABROBO-ONTO. Next,
we continue with a SELECT clause. The instances
of type Robot, by themselves, are not meaningful to
the users. Thus, we want to display the names of the
instances to the users. We specify it with an addi-
tional triple in the beginning of the WHERE clause,
and continue the clause with the transformed SPARQL
concept:
Algorithm 3: transformWithNode.
Input : A with-node n
Output: A DL concept description Q that
represents the concept in n
// n.noun denotes associated noun of node n
// n.values denotes the list of values of node n
// n.quanti f ier denotes the quantifier of node n
// n.aggregator denotes the aggregator of node n
// n.datatype denotes datatype of the noun in
node n
Q ←
/
0;
if n.noun is functional then
if n.datatype = boolean then
Q ← Q u ∃(n.noun).{
0
n.values
0
0
ˆˆxsd :
boolean};
else
if n.aggregator =
0
≥
0
or
n.aggregator =
0
≤
0
then
Q ← Q u
∃(n.noun).(n.aggregator)
n.values
0
;
else if n.aggregator =
0
=
0
then
Q ← Q u ∃(n.noun).{n.values
0
};
else if n.aggregator =
0
! =
0
then
foreach value v ∈ n.values do
Q ← Q u ¬∃(n.noun).{v};
else
if n.quanti f ier = NO then
Q ← Q u ¬∃(n.noun).xsd : (n.datatype);
else if n.quanti f ier = ALL then
Q ← Q u ∀(n.noun).xsd : (n.datatype);
else if n.quanti f ier = SOME then
Q ← Q u ∃(n.noun).xsd : (n.datatype);
else
if n.aggregator =
0
=
0
then
foreach value v ∈ n.values do
Q ← Q u ∃(n.noun).{v};
else if n.aggregator =
0
! =
0
then
foreach value v ∈ n.values do
Q ← Q u ¬∃(n.noun).{v};
return Q
PREFIX rdf: <http://.../22-rdf-syntax-ns#>
PREFIX rr: <http://.../RehabOnto.owl#>
SELECT DISTINCT ?name WHERE {
?robot1 rr:has_Name ?name.
...
}
Once we obtain a SPARQL query, we can use
the DL reasoner PELLET to find answers to queries,
through the Jena framework.
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
80
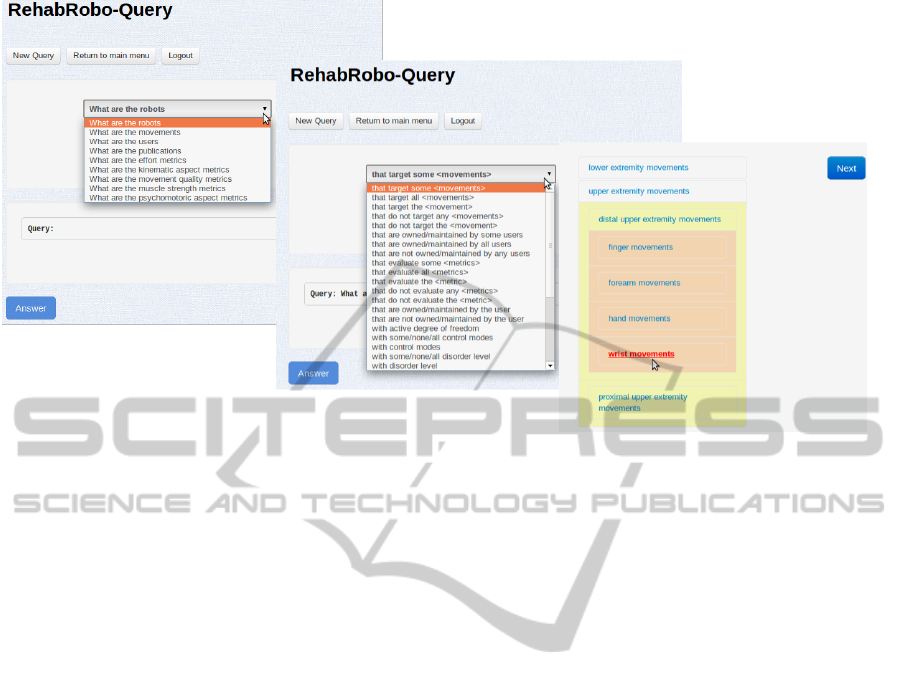
Figure 2: Constructing a query with the guide of an interactive, intelligent user interface.
4 INTELLIGENT USER
INTERFACE FOR QUERY
ANSWERING
We have designed an interactive, intelligent user-
interface to guide users to express their natural lan-
guage queries about rehabilitation robots, and to
present the answers to their queries with links to de-
tailed information.
The main user interface for querying includes a
drop-down list, showing the possible ways to begin a
query. Then, according to the user’s choices, it pro-
vides different types of features. It provides auto-
completion to help users enter values for nouns that
correspond to data properties of type string. If the
user should choose a concept among a hierarchy, then
it displays an accordion view and enables the user to
click on the option s/he wants. In addition, it allows
multiple selection of values for relational properties.
For functional properties, user is able to select mul-
tiple items for inequality. User can choose a number
of options among “less than or equal”, “more than or
equal”, “equal” and “not equal” while entering values
for a data property of type integer or float. Figure 2
illustrates some parts of constructing the query “What
are the robots that target some wrist movements with
actuation=’series elastic’?” with this interface.
How the results of a query is displayed to user de-
pends on the query. For instance, if the query is about
robots, then the user sees the names of the retrieved
robots. If the query is about movements or metrics,
then the user sees the concept names instead of the in-
stance URIs which would make no sense to the user.
Note that, since the transformation of a query is
designed to construct the query over REHABROBO-
ONTO, the SPARQL query resulting from the transfor-
mation process that is displayed to the user is always
valid in the context of REHABROBO-ONTO. Also the
transformation of a query in REHABROBO-CNL to
SPARQL is deterministic, and does not involve any
ambiguities. Hence, the accuracy of the constructed
SPARQL query is always 100%.
Also note that the transformation of a query in
REHABROBO-CNL into a SPARQL query is asymp-
totically linear in time, in the size of the query:
parsing a REHABROBO-CNL query into a QDT is
done in linear time thanks to the intelligent-user in-
terface; transformation of a QDT into a DL concept
requires traversing the QDT once and thus done in
linear time; transformation of a DL concept into a
SPARQL query requires going over the DL concept
once and thus done in linear time. Indeed, the trans-
formation is quite efficient in terms of computation
time: it is observed that the transformation a query
in REHABROBO-CNL into a SPARQL query usually
takes less than a few seconds of CPU time.
5 RELATED WORK
Development of natural language interfaces that pro-
vide query answering over ontologies has been sub-
ject of research for many years (Bernstein and Kauf-
AnsweringNaturalLanguageQueriesaboutRehabilitationRoboticsOntologyontheCloud
81

mann, 2006; Kaufmann et al., 2006; Lei et al., 2006;
Lopez et al., 2007; Kaufmann et al., 2007; Wang
et al., 2007; Frank et al., 2007; Battista et al., 2007;
Zhou et al., 2007; Cimiano et al., 2008; Tablan et al.,
2008). These studies propose various approaches over
common challenges, such as processing of the natural
language input (balancing ambiguity and expressive-
ness) and support for broad or narrow domains (porta-
bility).
There are some ontology systems, like
QACID (Ferr
´
andez et al., 2009), PowerAqua (Lopez
et al., 2012), FREyA (Damljanovic et al., 2012),
with natural language interfaces. QACID is designed
for a movie ontology, whereas FREyA and Pow-
erAqua have been used with different ontologies.
These systems take simple natural language queries,
translate a query into a SPARQL query (e.g., using
available parsers to obtain query triple forms), and
use a query engine to find an answer over specified
ontologies. However, these systems are restricted
to simple forms of queries (e.g., that do not involve
negation, disjunction or relative clauses). Our query
language and query answering methods allow more
complex forms of queries. For instance, the sort of
a query like “What are the robots that target some
shoulder movements with actuation=’electrical’ and
(with transmission=’cable drive’ or with transmis-
sion=’direct drive’)?” (presented in Figure 1) is not
supported by these systems, due to nested relative
clauses. A query like “What are the publications with
clinical study and that do not reference any robots
with active degree of freedom ≤ 1?” is not supported
by these systems due to negation.
To eliminate the ambiguity of natural language
queries and to allow a larger variety of queries (Erdem
et al., 2011; Valencia-Garc
´
ıa et al., 2011) consider
controlled natural languages (CNLs). For instance,
(Erdem et al., 2011) develops a CNL for a specific
domain, biomedical informatics, whereas (Valencia-
Garc
´
ıa et al., 2011) develops a CNL for SPARQL
queries over ontologies. Our work is similar to these
related work since we also consider queries in a CNL,
but we target a different domain and more general
forms of queries (e.g., that involve negations, quan-
tifiers, or nested clauses). Also our method, in partic-
ular, the transformations of natural language queries
into formal queries, is different due to the underly-
ing formalisms. For instance, (Erdem et al., 2011)
transforms a CNL query into answer set program-
ming (Brewka et al., 2011) by means of a tree struc-
ture, whereas (Valencia-Garc
´
ıa et al., 2011) trans-
forms a CNL query into SPARQL utilizing a query on-
tology that essentially represents the grammar of the
CNL.
6 DISCUSSION AND
CONCLUSION
We have introduced a novel method to answer nat-
ural language queries about rehabilitation robotics,
over the first formal rehabilitation robotics ontology
REHABROBO-ONTO. We have developed an intelli-
gent, interactive query answering system, using Se-
mantic Web technologies, and deployed it on the
cloud via Amazon web services.
4
Guiding the users
to express their complex queries in a natural language
and displaying the answers to queries in a readable
format, this user interface may help engineers inspire
new rehabilitation robot designs and practitioners to
make more informed decisions on technology based
rehabilitation.
In our approach, queries are specified in a con-
trolled natural language, called REHABROBO-CNL,
whose vocabulary and grammar are designed and de-
veloped specifically for REHABROBO-ONTO. This
limits the expressiveness of questions to some ex-
tent. On the other hand, it also has a strong advan-
tage not only by addressing the ambiguity and habit-
ability problems of natural languages, but also by al-
lowing more general forms of complex queries (some
of which cannot be handled by the ontology systems
with a full natural language interface).
Our approach transforms a CNL query into a
SPARQL query, by means of a DL concept rather than
directly. This provides us a flexibility of being able
to utilize DL reasoners for query answering. It also
provides us a logical formalism to study the formal
properties of the specification language and reasoning
methods in the future.
Our ongoing work involves evaluation of this sys-
tem by both rehabilitation engineers and physical
medicine experts. Our future work includes extension
of REHABROBO-CNL to enable complex queries
over other related ontologies, such as anatomy and
disease ontologies. It also includes investigation of
methods to partially answer queries, which do not
have any answer with respect to the underlying on-
tology.
ACKNOWLEDGEMENTS
Thanks to anonymous reviewers for useful com-
ments and suggestions. This work has been par-
tially supported by Sabanci University IRP Grant and
TUBITAK Grant 111M186.
4
http://ec2-54-228-52-230.eu-west-1.compute.
amazonaws.com/rehabrobo/
KEOD2014-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
82

REFERENCES
Antoniou, G. and van Harmelen, F. (2004). Web ontology
language: Owl. In Handbook on Ontologies, pages
67–92.
Battista, A. D. L., Villanueva-Rosales, N., Palenychka, M.,
and Dumontier, M. (2007). SMART: A web-based,
ontology-driven, semantic web query answering ap-
plication. In Semantic Web Challenge, volume 295.
Bernstein, A. and Kaufmann, E. (2006). GINO - a guided
input natural language ontology editor. In Proc. of
ISWC, pages 144–157.
Brewka, G., Eiter, T., and Truszczynski, M. (2011). An-
swer set programming at a glance. Commun. ACM,
54(12):92–103.
Cimiano, P., Haase, P., Heizmann, J., Mantel, M., and
Studer, R. (2008). Towards portable natural lan-
guage interfaces to knowledge bases - the case of the
ORAKEL system. Data Knowl. Eng., 65(2):325–354.
Damljanovic, D., Agatonovic, M., and Cunningham, H.
(2012). FREyA: an interactive way of querying linked
data using natural language. In Proceedings of the 8th
international conference on The Semantic Web, Proc.
of ESWC, pages 125–138.
Dogmus, Z., Gezici, G., Patoglu, V., and Erdem, E. (2012).
Developing and maintaining an ontology for rehabili-
tation robotics. In Proc. of KEOD, pages 389–395.
Dogmus, Z., Papantoniou, A., Kilinc, M., Yildirim, S. A.,
Erdem, E., and Patoglu, V. (2013). Rehabilitation
robotics ontology on the cloud. In Proc. of ICORR.
Erdem, E., Erdem, Y., Erdogan, H., and Oztok, U. (2011).
Finding answers and generating explanations for com-
plex biomedical queries. In Proc. of AAAI.
Fernandes, D. Y. S. (2009). Using Semantics to Enhance
Query Reformulation in Dynamic Distributed Envi-
ronments. PhD thesis, Federal University of Pernam-
buco.
Ferr
´
andez, O., Izquierdo, R., Ferr
´
andez, S., and Vicedo,
J. L. (2009). Addressing ontology-based question an-
swering with collections of user queries. Information
Processing and Management, 45(2):175 – 188.
Frank, A., Krieger, H.-U., Xu, F., Uszkoreit, H., Crysmann,
B., Jrg, B., and Schfer, U. (2007). Question answer-
ing from structured knowledge sources. Journal of
Applied Logic, 5(1):20 – 48.
Horrocks, I., Patel-Schneider, P. F., and van Harmelen, F.
(2003). From shiq and rdf to owl: the making of a
web ontology language. J. Web Sem., 1(1):7–26.
Kaufmann, E., Bernstein, A., and Fischer, L. (2007). NLP-
Reduce: A naive but domain-independent natural lan-
guage interface for querying ontologies. In Proc. of
ESWC.
Kaufmann, E., Bernstein, A., and Zumstein, R. (2006).
Querix: A natural language interface to query ontolo-
gies based on clarification dialogs. In Proc. of ISWC,
pages 980–981.
Lei, Y., Uren, V., and Motta, E. (2006). SemSearch: A
search engine for the semantic web. In Proc. of EKAW,
pages 238–245.
Lopez, V., Fern
´
andez, M., Motta, E., and Stieler, N. (2012).
PowerAqua: Supporting users in querying and explor-
ing the semantic web. Semantic Web, 3(3):249–265.
Lopez, V., Uren, V., Motta, E., and Pasin, M. (2007). Aqua-
Log: An ontology-driven question answering system
for organizational semantic intranets. Web Semantics:
Science, Services and Agents on the World Wide Web,
5(2):72–105.
Orsi, G. (2011). Context Based Querying of Dynamic and
Heterogeneous Information Sources. PhD thesis, Po-
litecnico di Milano.
P
´
erez, J., Arenas, M., and Gutierrez, C. (2006). Semantics
and complexity of sparql. In The Semantic Web-ISWC
2006, pages 30–43. Springer.
PrudHommeaux, E., Seaborne, A., et al. (2008). Sparql
query language for rdf. W3C recommendation, 15.
Sirin, E., Parsia, B., Grau, B. C., Kalyanpur, A., and Katz,
Y. (2007). Pellet: A practical owl-dl reasoner. Web
Semantics: Science, Services and Agents on the World
Wide Web, 5(2):51 – 53.
Tablan, V., Damljanovic, D., and Bontcheva, K. (2008). A
natural language query interface to structured infor-
mation. In Proc. of ESWC, pages 361–375.
Valencia-Garc
´
ıa, R., Garc
´
ıa-S
´
anchez, F., Castellanos-
Nieves, D., and Fern
´
andez-Breis, J. (2011). OWL-
Path: An OWL ontology-guided query editor. Sys-
tems, Man and Cybernetics, Part A: Systems and Hu-
mans, IEEE Transactions on, 41(1):121–136.
Wang, C., Xiong, M., Zhou, Q., and Yu, Y. (2007). PANTO:
A portable natural language interface to ontologies. In
Proc. of ESWC, pages 473–487.
Zhou, Q., Wang, C., Xiong, M., Wang, H., and Yu, Y.
(2007). SPARK: adapting keyword query to seman-
tic search. In Proc. of ISWC/ASWC, pages 694–707.
AnsweringNaturalLanguageQueriesaboutRehabilitationRoboticsOntologyontheCloud
83
