
Q-Routing in Cognitive Packet Network Routing Protocol for
MANETs
Amal Alharbi, Abdullah Al-Dhalaan and Miznah Al-Rodhaan
Department of Computer Science, College of Information Sciences, King Saud University, Riyadh, Saudi Arabia
Keywords: Cognitive Packet Network (CPN), Mobile Ad Hoc Network (MANET), Q-Routing, Reinforcement
Learning, Stability-based Routing.
Abstract: Mobile Ad hoc Networks (MANET) are self-organized networks which are characterized by dynamic
topologies in time and space. This creates an instable environment, where classical routing approaches
cannot achieve high performance. Thus, adaptive routing is necessary to handle the random changing
network topology. This research uses Reinforcement Learning approach with Q-Routing to introduce our
MANET routing algorithm: Stability-Aware Cognitive Packet Network (CPN). This new algorithm extends
the work on CPN to adapt it to the MANET environment with focus on path stability metric. CPN is a
distributed adaptive routing protocol that uses three types of packets: Smart Packets for route discovery,
Data Packets for carrying data payload, and Acknowledgments to bring back feedback information for the
Reinforcement Learning reward function. The research defines a reward function as a combination of high
stability and low delay path criteria to discover long-lived routes without disrupting the overall delay. The
algorithm uses Acknowledgment-based Q-routing to make routing decisions which adapt on line to network
changes allowing nodes to learn efficient routing policies.
1 INTRODUCTION
Mobile Ad hoc networks is a promising research
field with rising number of real-world applications.
However, MANET environment is randomly
dynamic due to node mobility, limited power
resources, and variable bandwidth as well as other
factors as shown in (Perkins, 2001). Therefore, to
successfully communicate, nodes need an adaptive
distributed routing protocol that adjusts when the
network changes. Researchers in Artificial
Intelligence (AI) have contributed to the network
communication field through adaptive routing
protocols that use AI algorithms to find efficient
routes. Reinforcement Learning (RL) is an AI
technique which evaluates the performance of a
learning agent regarding a set of predetermined
goals (Sutton and Barton, 1998). For each step of
the learning process, a reward is provided to the
agent by its environment as feedback. At the
beginning of the learning process, the agent
(decision maker) chooses actions randomly and then
appraise the rewards. After some time, the agent
starts gathering knowledge about its environment,
and is able to take decisions that maximize the
reward on the long run.
MANETs are self-organized networks with no
fixed infrastructure. There has been many proposed
routing algorithms for MANETs as shown in
(Perkins, 2001). Designing MANET protocols faces
major challenges due to special characteristics of
this type of network. In this paper, we present an
adaptive smart routing protocol for MANETs based
on path stability evaluation. This routing algorithm
extends the work on CPN with adjustments to suit
the characteristics of a MANET. Our Stability-
Aware CPN routing algorithm introduces an explicit
neighbour discovery scheme and adjust the route
maintenance scheme to result in long-lived routes
with acceptable delay. Nodes in our routing
algorithm first learn the network state, then make
routing decision using Reinforcement Learning with
Q-Routing.
The paper is organized as follows. Section 2
shows the research problem definition and the
objectives of the research. Section 3 describes the
background while section 4 presents the problem
solution. Finally, section 5 shows the results
analysis and section 6 is the conclusion.
234
Alharbi A., Al-Dhalaan A. and Al-Rodhaan M..
Q-Routing in Cognitive Packet Network Routing Protocol for MANETs.
DOI: 10.5220/0005082902340243
In Proceedings of the International Conference on Neural Computation Theory and Applications (NCTA-2014), pages 234-243
ISBN: 978-989-758-054-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2 RESEARCH PROBLEM
CPN performs routing using three types of packets:
smart packets (SPs), data packets (DPs), and
acknowledgments (ACK). SPs are used for route
discovery and route maintenance. DPs carry the
actual data. An ACK carry feedback information
about the route performance. All packets have the
same structure: a header, a cognitive map, and the
payload data. A cognitive map holds information
about the nodes visited by the packet and the visiting
time. To discover routes, SP’s are source-initiated
to move through the network gathering specific
network information according to the specific
Quality of Service (QoS) goals determined in each
SP. Once the first ACK reaches the source node, the
discovered path is stored in a Route Cache. Then,
the algorithm reduces the rate at which the SP’s are
sent. The SPs that are sent after a route is
discovered are to maintain and improve QoS
delivered.
When a SP arrives at the destination node, an
ACK packet is created and sent to the source node.
The ACK uses the reverse route of the SP. The ACK
passes every node on the discovered route and
updates the weights in Random Neural Network
(RNN) (Gelenbe,1993) according to the route
performance.
When a SP arrives at an intermediate node, the
node decides which neighbour to forward the SP.
This decision is made using the RL/RNN algorithm.
As soon as the first ACK reaches the source
node, the source node copies the discovered route
into all DP’s ready to be sent to carry the payload
from source to destination. DP’s use source routing
with the discovered route until a new ACK brings a
new better route to the source node. The feedback
information from ACK is essential for the
Reinforcement Learning (RL) algorithm. Each
discovered route is evaluated according to the
reward function defined in the RL decision
algorithm. According to the route performance, the
weights in RNN are updated. The subsequent SP’s
visiting the same node for the same destination and
QoS will learn the efficient routing path depending
on these weight updates.
In order to adapt CPN routing algorithm to the
MANET environment, the major network
characteristics should be handled. A MANET has a
highly unstable topology. Node mobility is one of
the significant factors effecting a routing protocol
performance. Furthermore, nodes in ad hoc
networks suffer from resource limitations. Our
proposed algorithm adjusts the CPN routing
algorithm to be suitable for this environment. It
focuses on route stability to handle node mobility. It
also combines Q-routing with CPN.
The Stability-Aware CPN routing protocol for
MANETs is an adaptive protocol with self-
improvement capabilities. It offers the network the
ability to determine the QoS criteria according to the
data being transferred in a distributed way. Each
node in the network runs the protocol using RL with
Q-routing . Network information is collected only
for paths being used; there is no global network
information exchange.
The research routing algorithm’s main objective
is to implement Q-routing in CPN focusing on path
stability. The path stability is based on the
Associativity property of the mobile nodes in time
and space (Toh, 2004). Mobile nodes that show
high association stability are chosen for routing as
much as possible. The algorithm defines the reward
function as a weighted combination of high stability
and minimum delay.
Furthermore, the study aims to improve the
protocol performance robustness to handle the
network’s dynamic topology problem. This is
achieved by adjusting the routing protocol
maintenance process as shown in section 4.2.
3 BACKGROUND
The Stability-Aware CPN Routing protocol for
MANET is a unique research protocol, which
introduces node stability over space and time into
the CPN routing protocol. The first subsection
reviews the CPN, while the second subsection
reviews the stability-aware protocols. The last
subsection shows the Q-routing based protocols.
3.1 Cognitive Packet Network
CPN was first introduced to create robust routing for
the wired networks in (Gelenbe, 2001). It has been
tested and evaluated in later studies (Gelenbe and
Lent, 2001) to be adaptive to network changes and
congestions. A number of learning algorithms have
been researched before using Reinforcement
Learning based on Random Neural Networks
(Gellman, 2006). Genetic Algorithms have been
used in CPN to modify and enhance paths (Gelenbe,
2008). However, studies show that it improved
performance under light traffic only and increased
the packet delivery delay.
A study in (Gelenbe et al, 2004) investigated the
number of SP’s needed to give best performance. It
Q-RoutinginCognitivePacketNetworkRoutingProtocolforMANETs
235

resulted that SP’s in about 10% to 20% of total data
packet rate is sufficient to achieve best performance,
and that a higher percentage did not enhance the
performance.
There have been many studies evaluating the
CPN performance. One research studied CPN in the
presence of network worms (Skellari, 2008). It
concluded in a better failure-aware CPN. It achieved
that by introducing a detection mechanism which
stores timestamps of the last SP and ACK that pass
through the link. If no ACK was received after a SP
has passed in some determined time, the link is
considered under failure. However, there should be
an appropriate estimate for the average delay under
normal conditions for each link to be useful
(Skellari, 2009).
One extension of CPN is Ad hoc CPN (AHCPN)
(Gelebe and Lent, 2004), which uses combination of
broadcast and unicast of SP’s to search for routes.
The authors introduced a routing metric “path
availability” which modeled the probability to find
available nodes and links on a path. Node
availability was measured by the energy stored in
the node (remaining battery lifetime). Thus SP’s
selected nodes that have the longest remaining
battery with greater probability. The QoS Goal
function was a combined function of two goals:
maximum battery lifetime and minimum path delay.
The result was good performance (short delay and
energy-efficient), but there was a high number of
lost packets which meant that the algorithm did not
adapt to network changes quickly enough. Also,
node availability in real systems is determined by
many factors such as process load and work
environment and not just battery lifetime.
The AHCPN was later adjusted as in (Lent and
Zanoozi, 2005) which proposed a solution to control
both energy consumption in nodes and mutual
interference of neighbouring communications. The
paper suggests an adjusted transmission power level
when transmitting DP’s and ACK’s to save energy
and reduce interference. Only SP’s were transmitted
using full power. The result was that nodes have
more energy to participate in routing. Nodes with
more energy were chosen in paths with higher
probability.
Enhancements to AHCPN continued as research
developed. A new routing metric “Path Reliability”
was presented in (Lent,2006), characterized by
reliability of nodes and links. Node reliability wss
considered to be the probability that a node will not
fail over a specific time interval which was
estimated to be the average network lifetime. The
QoS combined goal function includes maximum
reliability and minimum path delay. Reliability was
continuously monitored, and if it dropped below a
certain threshold, the source node was informed to
start a new route discovery before link breakage.
3.2 Stability based Protocols
Stability-Aware routing algorithms aim to find the
longest-lived routes. However, there are many
approaches to study path stability.
In (Dube, 1997) the authors studied radio
propagation effect on the signal effect strength. The
study regard the link stability as the probability of
the received signal strength higher than a
predetermined threshold. They believed that the
path bottleneck was the least stable link within it. In
(Trivino, 2006), the Ad hoc On-demand Stability
Vector routing protocol was proposed. It discovered
routes and maintained them in relation to radio
channels. In (Targen, 2007), the study introduced a
new link stability classification. The study
considered the links between low mobility nodes to
be stationary links. On the other hand, transient links
exist only for some short time and are more likely to
cause link breakage. The authors introduced a
routing protocol that used stationary links as much
as possible to give more stable routes.
The study in (Toh, 2000) introduced the
Associativity metric for determining node stability
through time and space within the neighbourhood.
Associative Based Routing (ABR) defined
Associativity to determine a link’s connection
stability and thus path stability. The Associativity of
a node with a certain neighbour is the degree of
association over time and space. The Associativity
property assumes that a mobile node goes through a
stage of instability with high mobility followed by a
stage of stability when it is dormant (connected to
the same neighbours for some time) before the
mobile node moves out of proximity (Manikandan,
2000). The dormant stage is the best time for a node
to participate in routing, which is determined by a
high Associativity level. Each node sends out
periodic beacons with its identity and battery
lifetime to signify its existence. If the number of
beacons (i.e. Associativity Ticks) received from a
certain neighbour is more than a specified threshold,
the link to that neighbour is considered stable. The
Associativity Threshold (Toh, 1997) is a function of
the beaconing interval, the relative velocity between
the two nodes, and the transmission range of a node.
Associativity ticks are reset when either the mobile
node itself or the neighbour move out of
transmission range (Murad, 2007).
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
236

Signal Stability based Adaptive (SSA) routing
protocol depends on signal strength and location
stability (Sildhar, 2005). However, simulations
show that it does not perform better than a simple
shortest path algorithm.
There is also some significant research about link
and path duration to propose that the residual
lifetime of a link determines the expected path
duration (Han, 2006). This kind of work studies the
distribution of link lifetimes in a network. Each time
a link breaks the average lifetime of the link is
updated for future use in path duration estimation.
However, the results of the study are closely related
to the mobility model assumed. It also assumes that
all nodes have the same movement pattern. It also
depends on information gathered over a long time in
order to reasonably estimate path duration and make
routing decisions accordingly.
In a different approach to deal with the
uncertainty in MANETs, many researchers
considered probabilistic methods to estimate node
stability and path lifetimes. In (Tseng, 2003), the
authors attempted to predict the route lifetimes in
different mobility patterns. Sophisticated
probability methods were used to determine the
expected value of each link lifetime in a route. Their
analysis revealed an expected outcome that
predicting route lifetimes highly depend on the node
mobility pattern assumed. The author of (Camp,
2002) proposed a formal model to predict the
lifetime of a route based on Random Walk model.
The research defined a probability Existence
function to compute a route lifetime, which allowed
to estimate residual lifetime of a route to use in
routing decisions for stable routes. A complete
probabilistic analysis in MANETs using Random
Way point mobility model was conducted in
(Chung, 2004). The result showed that the
exponential distribution was a good function to
predict route behaviour for stability evaluation.
3.3 Q-Routing based Protocols
The algorithm in (Boyan and Littman, 1999) first
introduced RL in networking to solve the problem of
routing in static networks. Their adaptive algorithm
was based on the RL scheme called Q-Routing. The
results reveal that adaptive Q-Routing performed
better than shortest path algorithm in static networks
under changing network load and connectivity. In
another study, the authors used RL to perform a
policy search to optimize routing decisions that
resulted in multiple source-destination paths to deal
with high network load (Brown, 1999). Authors in
(Kumar and Miikulainen, 1999) developed a
confidence–based Q-routing algorithm with dual
RL. Their objective was mainly to increase quantity
and quality of exploration in Q-routing. In (Chang
et al, 2004), the authors proposed a straight forward
adaptation of the basic Q-routing algorithm to Ad
hoc mobilized networks. The main objective was to
introduce traffic-adaptive Q-routing in Ad hoc
networks. In (Tao et al, 2005) the authors combine
Q-routing with Destination Sequence Distance
Vector routing protocol for mobile networks. To
deal with mobility, the concept of path lifetime was
introduced to reflect path stability. In (Forster,
2007), the author used RL to propose a solution to
multiple destination communication in WSN using
Q-Routing.
Other authors propose a routing model that is fit
for ad hoc networks using different RL algorithms.
One paper used the Prioritized Sweeping RL model
technique to propose a Collaborative Reinforcement
Learning (CRL) routing algorithm for MANETs
called SAMPLE (Kulkani and Rao, 2010). This
routing protocol converged fast to routing solutions
providing QoS. It was based on a reward function
that approximates the number of transmissions
needed to transmit a packet. There was some
extended research on SAMPLE to optimize it in
relation to packet delivery, energy-consumption,
QoS, and scalability.
Authors in (Santhi et al, 2011) propose a
MANET Q-routing protocol considering bandwidth
efficiency, link stability, and power metrics. They
applied Q-routing to Multicast Ad hoc Distance
Vector (MAODV), and their results showed
enhancements in QoS delivered compared to the
original MAODV.
The author in (Wang, 2012) proposed a self-
learning routing protocol based on Q-learning that
uses Signal to Interference plus Noise Ratio (SINR),
delay, and throughput to deliver the desired QoS.
The algorithm uses a Bayesian Network to estimate
congestion levels at neighbouring nodes. Their
results showed that their algorithm improves
performance in dense, high load networks.
In (Sachi and Parkash, 2013), introduce a
MANET routing algorithm by combining Q-learning
with Ad hoc Distance Vector (AODV) to achieve
higher reliability. It considers QoS parameters such
as traffic, channel capacity, energy, bandwidth, and
packet loss ratio.
Q-RoutinginCognitivePacketNetworkRoutingProtocolforMANETs
237

4 STABILITY-AWARE CPN
Stability-Aware CPN routing algorithm for
MANETS defines the routing process as a
Reinforcement Learning problem. This allows
learning the network topology in short time without
periodic advertisement of network information or
global routing information exchange as in the classic
algorithms.
4.1 Path Stability
A MANET is a type of network that is self-
configured with no infrastructure. Nodes are free to
move and join arbitrarily. However, there are some
patterns that the nodes follow which allows routing
protocols to select the best nodes for the routing
process. One such node property is the Node
Associativity (Toh, 2004) with its neighbours over
time and space. It reveals the connection stability of
nodes in MANETs. Each mobile host periodically
sends a beacon to each of its neighbours every
beacon interval time (p). Each time a mobile host
receives a beacon from a certain neighbour, the
number of Associativity Ticks (count) in relation
with this neighbour is increased by one unit. A
mobile node in an Ad hoc environment usually goes
through an initial stage of migrating with a certain
velocity (v). Then the node spends some pause time
dormant within its neighbours as shown in Figure. 1.
Figure 1: Determining Node Stable time using
Associativity.
For a path to be stable, the conducting nodes should
be stable as well as their links as much as possible.
Clearly, the node mobility model effects the routing
path stability. In this section we focus on stability of
the multi-hop routing path, which is determined here
by the level of connection-stability (Associativity) of
the conducting nodes. We define the Path-Stability-
Ratio under the Random Way Point mobility model
as the percentage of stable nodes along the routing
path. It is calculated at the Destination Node using
the equation 1.
(1)
4.2 Q-Routing in CPN
Network Routing can be modelled as a RL problem
to learn an optimal control policy for network
routing.
A node is the agent which makes routing
decisions. The network is the environment. The RL
reward is the network performance measures
.
We assume N = {1, 2, ...., n} is a set of nodes in
mobile Ad hoc network and the network is
connected. We also assume that each node has
discrete time t , where each time step is a new
decision problem to the same destination. At time t
node x wants to send a Smart Packet (SP) to some
destination Node d. Node x must take a decision to
whom it sends the SP with minimum delay and
maximum path stability possible. The node is the
agent and the observation (state) is the destination
node. The set of actions the agent (node x) can
perform is the set of neighbours to whom it can
forwards the packet to.
In order for the agent to learn a model of the
system (network), Q-values (Peshkin and Savova,
2002) are used. A Q-value is defined as
Q(state1,action1) and has a value which represents
the expected rewards of taking action1 from state1.
Each state is a destination node d in the network.
Thus after some time steps (stages of RL), the Q-
values should represent the network accurately.
This means that at each state, the highest Q-value is
for actions (neighbours) that represent the best
choices (Brown, 1999). Each node x has its own
view of the different states of network and its own
Q-values for each pair (state, action) in its Q-table
written as
, . The structure of the Q-Table
is shown in Figure 2.
Neighbor1 Neighbor2 Neighbor3
Destination1
1, 1
1, 2
......
Destination2
2, 1
2, 2
......
Destination3
3, 1
3, 2
......
Figure 2: The Q-Table for node x.
The more accurate these Q-values are of the actual
network topology, the more optimal the routing
decisions are. Thus, these Q-values should be
updated correctly to reflect the current state of the
network as close as possible. This update also has to
be with minimum processing overhead. In our
algorithm, update of Q-values occurs whenever a
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
238

node has to make a routing decision to forward a SP
depending on the current reward calculated at each
neighbor and the old Q-value estimate. Rewards
are calculated depending on information gathered at
each node from Acknowledgments carrying
performance measures (delay and path-stability-
ratio).
1, 1
1, 1
1
(2)
The update is performed according to equation 2.
Where
1, 1
is the new estimate and
1, 1
is the old estimate , and
is the
current reward. Also α is a learning constant
typically close to 1, 0< α < 1 . Here in this
algorithm α= 0.8 , which means that delayed reward
in the future are more important than immediate
rewards.
4.3 Reward Function
The Goal Function of the routing process is a
common goal for all agents (nodes) in the network.
The goal is to minimize a weighted combination of
the delay and the inverse of the path-stability-ratio.
This goal function is expressed mathematically in
equation 3.
The goal is calculated at every node where path-
stability-ratio is the total stability ratio of the path
from this node to the destination node. Also the
delay is the total delay from this node to the
destination node.
1
(3)
The reward depends on this goal function. It is
defined as the inverse of the routing goal. As shown
in Equation 4. The Reinforcement Learning
algorithm aims to select optimal actions
(neighbours) at each time step in order to maximize
the network routing performance on the long run.
This implies calculating the reward for all the nodes
along the path starting from the node x.
1/
(4)
4.4 Routing Protocol Processes
The research routing protocol is described in this
section through explaining the major protocol
processes and its effect on the network performance.
4.4.1 Neighbor Discovery
MANETs are considered self-configured networks
with no communication infrastructure. Thus,
neighbour discovery is an essential part of
initialization of a MANET (Perkins, 2001). A node
has to be able to know at least the one-hop
neighbours to communicate with any other node in
the network. In Stability-Aware CPN, periodic
beacons are used to signify node existence. The
beacon contains information such as source-
identification which is the transmitting node and the
timestamp when it got sent.
The effect of the beaconing period on the node's
power consumption is critical. A very small beacon
period (i.e. 10ms) dissipates the node's power
rapidly. It also condenses the network with too
many control packets without any significant
advantage (Toh, 2000). Each node keeps a
neighbour table to hold neighbour information
needed to update Q-values. A neighbouring node
increments it’s Associativity Ticks for a neighbour
each time it receives a beacon from that specific
neighbour. Associativity Ticks are initialized when
the neighbour moves away of radio range. A
neighbour is considered moved away, when a node x
does not receive any beacons from this neighbour
for three times the beacon period. Inactive nodes
and nodes that are low in battery become passive
and refrain from sending beacons.
4.4.2 Route Discovery
In the Stability-Aware CPN, the route discovery
process is triggered when a source node needs to
send data packets to an unknown destination node.
The source node first checks its route cache for a
known route to that destination. If there is no route
in the cache, the source node creates and send SP's
with a smart packet ratio 2% of the total data packets
to be sent. SP's
search the network gathering
information from each node visited to find good
routes to the target destination. At the beginning
nodes do not have a complete picture of the whole
ad hoc network. However, with time and learning
nodes start to have a good picture about the state of
network. Thus later SP's learn from previous SP's of
the same QoS and same destination. Nodes start to
take good routing decisions using RL with Q-
Routing to select next hops for SP's wisely. The
decision algorithm uses network information stored
in the Neighbour Tables, Mailboxes, and Q-Tables.
When SP finally reaches its destination, an ACK is
sent to the source node. The source node uses
information in the ACK to store a new route entry in
the Route Cache.
Q-RoutinginCognitivePacketNetworkRoutingProtocolforMANETs
239
4.4.3 Gathering Network Information
The SP’s collect specific network information as
they move around and store it in a distributed
fashion as follows. Route Caches located only at
source nodes, stores complete path for all active
destinations. Cognitive Maps (CM) exist in all type
packets to store addresses and network metrics
(Battery, Arrival time, and Associativity) of visited
nodes. ACK’s distribute this information to update
mailboxes along the path. Packets store complete
route in their CM. Mailboxes are located at every
node, they keep statistics about performance of
active paths such as average delay, degree of
associativity. This information is used by RL
algorithm to decide on next hop. Q-Tables are
located at nodes for the RL. Q-Tables are updated
by the RL algorithm. Neighbour Tables are created
and maintained at every node to keep information
about neighbours and their associativity degree and
forwarding delay.
4.4.4 Route Maintenance
The Route Maintenance process is of great
importance in the operations of a routing protocol.
This process if performed efficiently, decreases the
packet loss ratio and the total packet delay.
However, it should introduce minimum control
overhead. In Stability-Aware CPN route
maintenance of active routes is achieved by sending
a small fraction of SP's (1%) to search for alternate
routes. Only active routes are maintained. Once a
better route is discovered, the old one is considered
invalid
. An intermediate node can detect link
breakage while forwarding a Data Packet, and thus
sends a Route-Error packet to the source node.
When a source node receives a Route-Error packet,
it stops using this route and sets the Rout-invalid
flag in the routes entry in the Route Cache. If the
source node still has some packets to send to that
destination, it checks its Route Cache for an
alternate route and use it. If the Route Cache has no
alternate routes, then the source node issues a new
Route Discovery process.
4.4.5 Routing Policy
The basic Q-routing algorithm shown in figure 3 is a
greedy algorithm. It acquires an estimate only from
the best neighbour. Each time a node sends a packet,
it updates only the Q-value corresponding to the best
neighbour. Thus, it is possible to return sub-optimal
policy by not exploring other non-maximum
neighbours. Other versions have tried to overcome
this drawback in different ways as in (Chetret,
2009).
Figure 3: Basic Q-Routing.
ACK
Hello
Message
SP arrival
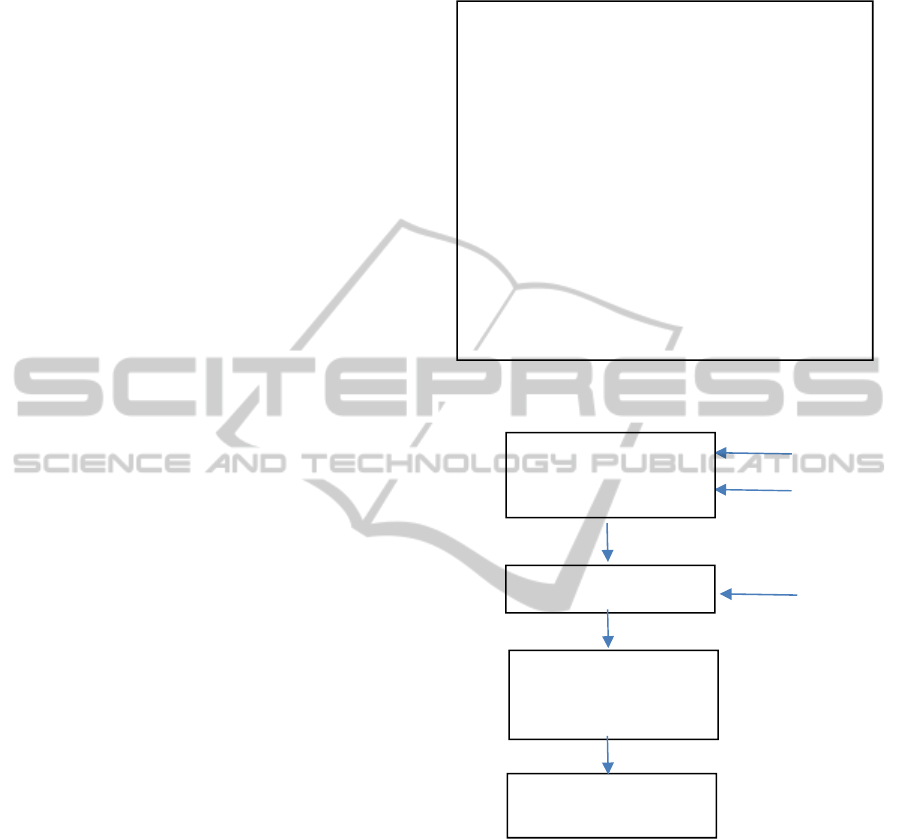
Figure 4: Routing Policy at each node.
Our algorithm steps are shown in Figure 4.
Feedback from ACK updates the tables in each node
it visits, including the delay and Associativity degree
of the nodes on the path. Hello messages update
neighbour tables with immediate neighbour
information. Nodes do not communicate their
estimates. Instead, each node has a mailbox where
information is updated continuously with each ACK
arriving for SP or DP. When a node has to take a
decision to send a packet: 1- the node checks it
tables. 2- The node calculates the expected reward
from each neighbour and updates corresponding Q-
values. 3- The node selects the highest Q-value
,
,
,
1- Set initial Q-values for each node.
2- Get first packet from packet queue of
node x.
3- Choose the best neighbor node y and
forward the packet to y.
4- Get estimated value from y, which is
y’s best time estimate for packet
delivery.
5- Node x updates its Q-value for the best
neighbor using equation
6- Go to ste
p
2.
Update Mailbox
Update Neighbor
Table
Update Q-Table
Send SP to Best
Neighbor
Determine Best
Neighbor Based on
Q-values
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
240
neighbour and forwards the packet to it.
5 RESULT ANALYSIS
The numerical experiments for studying the use of
Q-routing in CPN using Acknowledgement feedback
were analysed using MatLab. Two experimental
small ad hoc networks of 4 and 12 nodes were used
to evaluate algorithm convergence behaviour.
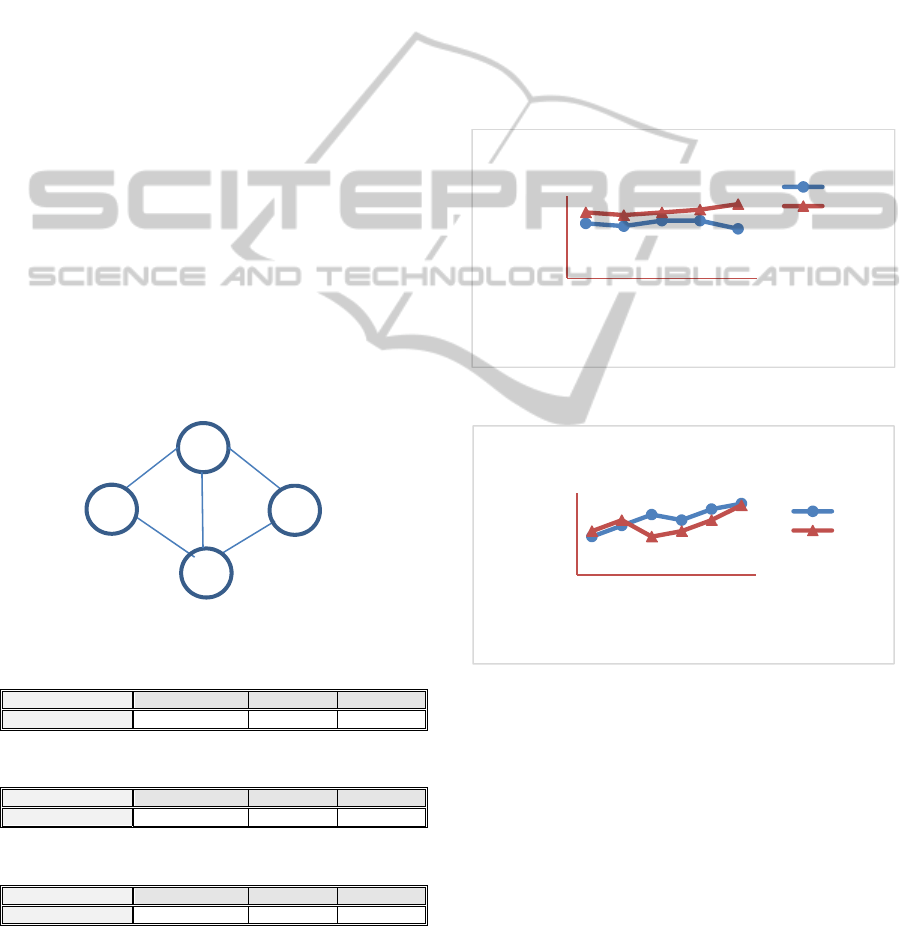
5.1 Four Node Network
The network with four nodes is shown in figure
5. The source node is node 0 and destination
node is node 3. The optimal path is through
nodes 0, 1, and 3 that give maximum rewards.
The algorithm shows fast convergence and give
corresponding Q-tables as shown in Tables 1,
2, 3 for each node 0, 1, and 2. Q-values are
continuously updated through feedback about
the reward the path delivered carried by ACK.
After some finite number of episodes, Q-values
no longer change and learning converges. Thus
the Q-values show more realistic values about
the neighbours connecting each node.
Figure 5: Four Node Network.
Table 1: Q-Table for node 0 (source).
Node 1 Node 2 Neighbor3
Destination3 1.2 0.3 -----
Table 2: Q-Table for node 1.
Node 0 Node 2 Neighbor3
Destination3 ------ 0.2 1.3
Table 3: Q-Table for node 2.
Node 0 Node 1 Node 3
Destination3 ------- 0,3 0.5
5.2 Protocol Simulation
To simulate the stability-Aware CPN for MANETs,
it was compared to non-adaptive Ad hoc Distance
Vector (AODV) (Perkins,2001) using OPNET 14.5
modeler. Simulated network is conducted by
randomly distributing 50 nodes over 1300m x
1300m square area. The simulation time for each run
is 300 seconds. The result data is averaged for each
point. The node mobility model used is the Random
Way Point with the node speed 25 meter per second
(m/sec) and node pause time varying from 10 to 300
seconds. Traffic is set to Constant Bit Rate (CBR)
with 1024 byte data packet. The sending packet rate
is set to 5 packets per second. The performance
metric studied are Packet Delivery ratio and Average
End-to-End Packet Delay time as shown in Figure 6
and 7.
Figure 6: End-to-end delay in mobility simulation.
Figure 7: Packet Delivery Ratio in mobility simulation.
5.3 Computational Time
Software computational time of the decision
algorithm is considered an important characteristic
to evaluate. The study in (Brown, 1999) reveals that
the original decision algorithm in CPN with
RNN/RL is an O
) every time a decision is taken,
plus additional 2 operations for normalizing
matrices weights for every weight update process.
This is undesirable for a mobile ad hoc node because
of the nodes limitations in processing power and
memory. The original algorithm also defines and
maintains two weight matrices for each QoS-
0
0,1
0,2
0,3
10 50 100 250 300
Delay(sec)
pausetime(sec)
End‐to‐EndDelay
SCPN
AODV
0,85
0,9
0,95
1
10 30 50 100 200 300
PacketdeliveryRatio
pausetime(sec)
PacketDeliveryRatio
SCPN
AODV
1
3
0
2
Q-RoutinginCognitivePacketNetworkRoutingProtocolforMANETs
241

Destination pair at each node. It also stores
Excitation probabilities for every neighbour of each
node in the network.
On the other hand, our decision algorithm for
Stability-Aware CPN is based on RL/Q-Routing. It
is considered an O) where n is the number of
neighbors a node on the average has. Our algorithm
avoids using weight matrices and weight
normalizing overhead. This reduces processing
complexity and memory storage needs. The
decision algorithm stores averaged QoS data in Q-
Tables with one Q-value for each neighbour. Also
our Decision algorithm defines for each node one Q-
Table that represents the whole network state.
6 CONCLUSIONS
The Cognitive Packet Network is an experimental
routing protocol that uses Computational
Intelligence in network routing. This research
studied the implementation of path stability in the
goal function of the CPN routing algorithm to adapt
it to the MANET environment. Most of the
implementation of Q-routing in MANETs were
enhancement of Ad hoc Distance Vector (AODV).
Our algorithm combined Cognitive Packet Network
routing protocol with Q-routing with some
adjustments to accommodate the MANET
environment. Stability-Aware CPN routing
algorithm for MANETs gives comparable results to
conventional MANET routing protocols without
disrupting the overall end-to-end delay. Some
further studies should be conducted to evaluate the
routing protocol in terms of the amount of packet
control overhead.
REFERENCES
Rahul D., Patil B. (2013) ‘MANET with Q-Routing
Protocol’, Medwell Journal of Information
Technology, vol. 12. Issue 1, pp.20-26.
Sachi, M., Prakash, C.(2013) ‘QoS Improvement for
MANET Using AODV Algorithm by Implementing
Q-Learning Approach’, International Journal of
Computer Science and Technology IJCST vol.4 , issue
1, pp. 407-409.
Wang K. (2012) ‘A MANET Routing Protocol Using Q-
Learning Method Integrated with Bayesian Network ’,
Proceedings of International Conference on
Communication Systems (ICCS), Singapore, 2012,
IEEE, pp. 270-274.
Santhi, G., Nachiappan, A. Ibrahime, M.,Raghunadhane,
R. (2011) ‘Q-Learning Based Adaptive QoS Routing
Protocol for MANNETS’ , Proceedings of the
International Conference on Recent Trends in
Information Technology. Chennai: IEEE. Pp. 1233-
1238.
Kulkani, S., Rao, R. (2010) ‘Performance Optimization of
Reinfrocement Learning Based Routing Algorithm
Applied to Ad hoc Networks’, International Journal
of Computer Networks and Communications, vol. 2,
pp. 46-60.
Chetret, D. L., (2009) ‘Adaptive Routing in MANETS
using RL and CMAC’. Master Thesis submitted to
Department of Electrical and Computer Engineering,
National University of Singapore.
Skellari, G. (2009), ‘Maintaining Quality of Service and
Reliability in Self-Aware Networks”, PhD Thesis for
Imperial College of London.
Gelenbe, E., Liu P., and Lain, J. (2008) ‘Genetic
Algorithms for Autonomic Route Discovery’, in
Proceedings of IEEE Conference on Distributed
Intelligent Systems, Washington, USA.
Skellari, G., Hey L., and Gelenbe, E. (2008), ‘Adaptability
and Failure Resilience of the Cognitive Packet
Network’, 27
th
IEEE Conference on Computer
Communications, Phoenix, Arizona, USA.
Mehandthan, N. (2008) “Exploring the Stability-Energy
Consumption-Delay Network Lifetime Trade-off of
MANET Routing Protocol”, Journal of Networks ,
vol.3, No.2.
Targen, J., Chuang, B. (2007) ‘A Novel Stability-Based
Routing for Mobile Ad hoc Networks”, IEICE
Transactions on Communications, B(4) : 876-884.
Murad, A., Al-Mahadeen, B. (2007) ‘Adding Quality of
Service Extensions to Enhanced ABR Routing
protocol’, American Journal of Applied Science.
Forster, A., Murphy, A. (2007) ‘Feedback Routing for
Optimized Multiple Sinks in WSN with
Reinforcement Learning”, Proc. 3
rd
International
Conference of Intelligent Sensors, Sensor Networks,
Information Process (ISSNIP).
Han, Y., (2006) ‘Maximizing Path Duration in MANETS’,
Maryland, USA.
Trivino-Cabrera A., Nieves-Perez, I. (2006) ‘Ad hoc
Routing based on Stability of Routes’, Proceedings of
the 4
th
ACM International Workshop on Mobility
Management and Wireless Access, ACM, New York,
USA. Pp. 100-103.
Gellman, M., Liu, P. (2006), ‘Random Neural for
Adaptive Control of Packet Networks’, Proceedings of
16
th
International on Artificial Neural Networks,
Greece, pp.313-320.
Lent, R. (2006) ‘Smart Packet-Based Selection of Reliable
Paths in Ad hoc Networks’, IEEE.
Toa, T. Tagashira, S. Fujita, S. (2005) ‘LQ-Routing
Protocol for MANETs’, In proc. Of Fourth Annual
ACIS International Conference on Computer and
Information Science.
Liu, C., Kaiser J. (2005), ‘A Survey of Mobile Ad hoc
Networks Routing Protocols’. University of Ulm,
Germany.
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
242

Lent, R., Zanoozi, R. (2005) ‘Power Control in Ad hoc
Cognitive Packet Network’, Texas Wireless
Symposium.
Chang, Y. , Ho, T. (2004) ‘Mobilized Ad hoc Networks: A
Reinforcement Learning Approach.’ Proc. Of First
International Conference on Autonomic Computing
IEEE Computer Society USA, pp. 240-247.
Chung, W. (2004) ‘Probabilistic Analysis of Routing on
Mobile Ad hoc Networks’, IEEE Communication
Letters 8(8): 506508.
Toh, C. K. , Lee , E. C. , and Ramos N. (2004), ‘Next
Generation Tactical Ad hoc Mobile Wireless Network’
,Technology Review Journal.
Gelenbe E., Lent R., and A. Nunez, (2004), ‘Self-Aware
Networks and Quality of Service’, Proceedings of
IEEE vol. 92(9): 1478-1489.
Gelenbe, E., Lent, R. (2004), ‘Power-Aware Ad hoc
Cognitive Packet Network’, Elsevier.
Punde, J., Pissinou, N. (2003) ‘On Quality of Service
Routing in Ad hoc Networks”, Proceedings of the 28
th
IEEE International Conference on Local Computer
Networks, IEEE Computer Society, Washington,
USA.pp.276-278.
Tseng, Y., Chang, C. (2003) ‘On Route Lifetime in Multi-
hop Mobile Ad hoc Networks’, IEEE Transactions on
Mobile Computing 2(4): 366-376.
Camp, T., Davies, J. (2002) ‘Survey of Mobility Models
for Ad hoc Networks Research”, Wireless
Communication & Mobile Computing (WCMC):
Special issue on MANET: Research Trend &
Application 2 (5): 483-502.
Peshkin, L., Savova, V. (2002) ‘Reinforcement Learning
for Adaptive Routing’, IEEE.
Gelenbe, E., Lent R., and Xu Z.,(2001), ‘Design and
Performance of Cognitive Packet Network’,
Performance Evaluation, 46,pp.155-176.
Halici, U. (2000), ‘Reinforcement Learning with Internal
Expectation for The Random Neural Network’,
Eur.J.Opns.Res. 126(2)2, pp.288-307.
Perkins, C. E. (2001), Ad Hoc Networking, Addison-
Wesley.
Gelenbe, E., Lent, R. and Xu Z.,(2001) ‘Measurement and
Performance of Cognitive Packet Network’, Journal of
Computer Networks, 46,pp.155-176.
Toh, C. K., Vassiliou, V. (2000) ‘The effects of Beaconing
on the Battery life of Ad hoc Mobile Computers’.
Manikandan, S., Naveen, L. and Padmanban, R., (2000)
‘Optmized Associativity-Based Threshold Routing for
Mobile Ad hoc Netwroks’, 2000.
Boyan, J., Littman, B. (1999) ‘Packet Routing in Dynamic
Changing Networks: A Reinforcement Learning
Approach’, In Advances in Neural Information
Processing Systems, vol.12, pp. 893-899.
Brown, T. X, (1999) ‘Low Power Wireless
Communication via Reinforcement Learning’, In
Advances in Neural Information Processing Systems.
Sutton, R., Barto, S. (1998) Reinforcement Learning: an
Introduction, MIT Press: Cambridge.
Toh, C.K. (1997) ‘Associativity Based Routing for Mobile
Ad hoc Networks’, IEEE Conference on Computer &
Communications ( IPCCC), Phoenix, USA.
Dube, R., Rais, C. R. and Wang, K.Y. (1997) ‘Signal
Stability Based Adaptive Routing SSA for Ad hoc
Mobile Networks’, Personal Communication, IEEE,
4(1): 36-45.
Gelenbe, E. (1993), ‘Learning in the Recurrent Random
Neural Network’. Neural Computing, 5(1), pp. 154–
164. 1993.
Q-RoutinginCognitivePacketNetworkRoutingProtocolforMANETs
243
