
Studying and Tackling Noisy Fitness in Evolutionary Design of Game
Characters
J. J. Merelo
1
, Pedro A. Castillo
1
, Antonio Mora
1
, Antonio Fern
´
andez-Ares
1
,
Anna I. Esparcia-Alc
´
azar
2
, Carlos Cotta
3
and Nuria Rico
4
1
University of Granada, Department of Computer Architecture and Technology,
ETSIIT and CITIC, 18071 Granada, Spain
2
S2Grupo, Valencia, Spain
3
Universidad de M
´
alaga, Departamento de Lenguajes y Sistemas Inform
´
aticos, M
´
alaga, Spain
4
Universidad de Granada, Depto. Estad
´
ıstica e Investigaci
´
on Operativa, Granada, Spain
Keywords:
Evolutionary Algorithms, Noisy Optimization Problems, Games, Strategy Games.
Abstract:
In most computer games as in life, the outcome of a match is uncertain due to several reasons: the characters
or assets appear in different initial positions or the response of the player, even if programmed, is not deter-
ministic; different matches will yield different scores. That is a problem when optimizing a game-playing
engine: its fitness will be noisy, and if we use an evolutionary algorithm it will have to deal with it. This is
not straightforward since there is an inherent uncertainty in the true value of the fitness of an individual, or
rather whether one chromosome is better than another, thus making it preferable for selection. Several meth-
ods based on implicit or explicit average or changes in the selection of individuals for the next generation have
been proposed in the past, but they involve a substantial redesign of the algorithm and the software used to
solve the problem. In this paper we propose new methods based on incremental computation (memory-based)
or fitness average or, additionally, using statistical tests to impose a partial order on the population; this partial
order is considered to assign a fitness value to every individual which can be used straightforwardly in any se-
lection function. Tests using several hard combinatorial optimization problems show that, despite an increased
computation time with respect to the other methods, both memory-based methods have a higher success rate
than implicit averaging methods that do not use memory; however, there is not a clear advantage in success
rate or algorithmic terms of one method over the other.
1 INTRODUCTION
In our research on the optimization of the behavior
of bots or game strategies, we have frequently found
that the fitness of a bot is noisy, in the sense that re-
peated evaluations will yield different values (Mora
et al., 2012) which is a problem since fitness is the
measure used to select individuals for reproduction.
If we look at in in a more general setting, noise in the
fitness of individuals in the context of an evolution-
ary algorithm has different origins. It can be inher-
ent to the individual that is evaluated; for instance, in
(Mora et al., 2012) a game-playing bot (autonomous
agent) that includes a set of application rates is op-
timized. This results in different actions in different
runs, and obviously different success rates and then
fitness. Even comparisons with other individuals can
be affected: given exactly the same pair of individu-
als, the chance of one beating the other can vary in
a wide range. In other cases like the one presented
in the MADE environment, where whole worlds are
evolved (Garc
´
ıa-Ortega et al., 2014) the same kind
of noisy environment will happen. When using evo-
lutionary algorithms to optimize stochastic methods
such as neural networks (Castillo et al., 1999) us-
ing evolutionary algorithms the measure that is usu-
ally taken as fitness, the success rate, will also be
noisy since different training schedules will result in
slightly different success rates.
The examples mentioned above are included ac-
tually in one or the four categories where uncertain-
ties in fitness are found, fitness functions with intrin-
sic noise. These four types include also, according
to (Jin and Branke, 2005) approximated fitness func-
tions (originated by, for instance, surrogate models);
robust functions, where the main focus is in finding
76
Merelo J., Castillo P., Mora A., Fernández-Ares A., Esparcia-Alcázar A., Cotta C. and Rico N..
Studying and Tackling Noisy Fitness in Evolutionary Design of Game Characters.
DOI: 10.5220/0005085700760085
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (ECTA-2014), pages 76-85
ISBN: 978-989-758-052-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

values with high tolerance to change in initial evalua-
tion conditions, and finally dynamic fitness functions,
where the inherent value of the function changes with
time. Our main interest will be in the first type, since
it is the one that we have actually met in the past and
which has led to the development of this work.
At any rate, in this paper we will not be dealing
with actual problems; we will try to simulate the ef-
fect of noise by adding to the fitness function Gaus-
sian noise centered in 0 and σ = 1, 2, 4. We will
deal mainly with combinatorial optimization func-
tions with noise added having the same shape and
amplitude, that we actually have found in problems
so far. In fact, from the point of view of dealing with
fitness, these are the main features of noise we will be
interested in.
The rest of the paper is organized as follows: next
we describe the state of the art in the treatment of
noise in fitness functions. The method we propose
in this paper, called Wilcoxon Tournament, will be
shown in Section 4; experiments are described and
results shown in Section 5; finally its implications are
discussed in the last section of the paper.
2 STATE OF THE ART
The most comprehensive review of the state of the art
in evolutionary algorithms in uncertain environments
was done by Jin and Branke in 2005 (Jin and Branke,
2005), although recent papers such as (Qian et al.,
2013) include a brief update of the state of the art.
In that first survey of evolutionary optimization by Jin
and Branke in uncertain environments this uncertainty
is categorized into noise, robustness, fitness approxi-
mation and time-varying fitness functions, and then,
different options for dealing with it are proposed. In
principle, the approach presented in this paper was de-
signed to deal with the first kind of uncertainty, noise
in fitness evaluation, although it could be argued that
there is uncertainty in the true fitness as in the third
category. In any case it could be applied to other types
of noise. In this situation, several solutions were been
proposed and explained in the survey (Jin and Branke,
2005). These will be explained next.
An usual approach is just disregard the fact that
the fitness is noisy and using whatever value is re-
turned a single time or after re-evaluation each gen-
eration. This was the option in our previous research
in games and evolution of neural networks (Castillo
et al., 1999; Mora et al., 2010; Merelo-Guerv
´
os et al.,
2001) and leads, if the population is large enough,
to an implicit averaging as mentioned in (Jin and
Branke, 2005). In fact, evolutionary algorithm selec-
tion is also stochastic, so noise in fitness evaluation
will have the same effect as randomness in selection
or a higher mutation rate, which might make the evo-
lution process easier and not harder in some particular
cases (Qian et al., 2013). In fact, Miller and Goldberg
proved that an infinite population would not be af-
fected by noise (Miller and Goldberg, 1996) and Jun-
Hua and Ming studied the effect of noise in conver-
gence rates (Jun-hua and Ming, 2013), proving that
an elitist genetic algorithm finds at least one solution
with a lowered convergence rate. But populations are
finite, so the usual approach is to increase the popula-
tion size to a value bigger than would be needed in a
non-noisy environment. This has also the advantage
that no special provision or change to the implemen-
tation has to be made; but a different value of a single
parameter.
Another more theoretically sound way is using a
statistical central tendency indicator, which is usually
the average. This strategy is called explicit averaging
by Jin and Branke and is used, for instance, in (Jun-
hua and Ming, 2013). Averaging decreases the vari-
ance of fitness but the problem is that it is not clear in
advance what would be the sample size used for av-
eraging (Aizawa and Wah, 1994). Most authors use
several measures of fitness for each new individual
(Costa et al., 2013), although other averaging strate-
gies have also been proposed, like averaging over the
neighbourhood of the individual or using resampling,
that is, more measures of fitness in a number which is
decided heuristically (Liu et al., 2014). This assumes
that there is, effectively, an average of the fitness val-
ues which is true for Gaussian random noise and other
distributions such as Gamma or Cauchy but not nec-
essarily for all distributions. To the best of our knowl-
edge, other measures like the median which might
be more adequate for certain noise models have not
been tested; the median always exists, while the aver-
age might not exist for non-centrally distributed vari-
ables. Besides, most models keep the number of eval-
uations is fixed and independent of its value, which
might result in bad individuals being evaluated many
times before being discarded; some authors have pro-
posed resampling, that is, re-evaluate the individuals
a number of times to increase the precision in fitness
(Rada-Vilela et al., 2014), which will effectively in-
crease the number of evaluations and thus slow down
the search. In any case, using average is also a small
change to the overall algorithm framework, requiring
only using as new fitness function the average of sev-
eral evaluations. We will try to address this in the
model presented in this paper.
These two approaches that are focused on the eval-
uation process might be complemented with changes
StudyingandTacklingNoisyFitnessinEvolutionaryDesignofGameCharacters
77

to the selection process. For instance, using a thresh-
old (Rudolph, 2001) that is related to the noise char-
acteristics to avoid making comparisons of individ-
uals that might, in fact, be very similar or statisti-
cally the same; this is usually called threshold selec-
tion and can be applied either to explicit or implicit
averaging fitness functions. The algorithms used for
solution, themselves, can be also tested, with some
authors proposing, instead of taking more measures,
testing different solvers (Cauwet et al., 2014), some
of which might be more affected by noise than others.
Any of these approaches do have the problem of
statistical representation of the true fitness, even more
so if there is not such a thing, but several measures
that represent, all of them the fitness of an individual.
This is what we are going to use in this paper, where
we present a method that uses resampling via an in-
dividual memory and use either explicit averaging or
statistical tests like the non-parametric Wilcoxon test.
First we will examine and try to find the shape of
the noise that actually appears in games; then we will
check in this paper what is the influence on the qual-
ity of results of these two strategies and which one, if
any, is the best when working in noisy environments.
3 NOISE IN GAMES: AN
ANALYSIS
In order to measure the nature of noise, we are go-
ing to use the Planet Wars game, that has been used
as a framework for evolving strategies, for instance,
in (Mora et al., 2012). In this game, initial position
of the players is random with the constraint that they
should be far enough from each other; other than that,
any planet in the game can be an initial position. Be-
sides, in the strategy used in that game, actions are not
deterministic, since every player is defined by a set of
probabilities to take one course of action.
An evolutionary algorithm with standard parame-
ters was run with the main objective of measuring the
behavior of fitness. A sample of ten individuals from
generation 1, and another 10 from generation 50 were
extracted. The fitness of each individual was mea-
sured 100 times. The main intention was also to see
how noise evolved with time. Intuitively we thought
that, since the players become better with evolution,
the noise and thus the standard deviation would de-
crease. However, what we found is plotted in Figure
1, which shows a plot of the standard deviation in both
generations and illustrates the fact that the spread of
fitness values is bigger as the evolution proceeds, go-
ing from around 0.15 to around 0.20. which might be
a bit misleading since the average values of the fitness
increase at the same time, but it implies that the noise
level might be around 20% of the signal in these kind
of problems.
But we were also interested in checking whether,
in fact, the normal distribution is the best fit for the fit-
ness measures. We tested three distributions: Gamma,
Weibull and normal (Gaussian) distribution after do-
ing an initial test that included Cauchy and Expo-
nential. All this analysis was done using the library
fitrdist in R, and data as well as scripts needed to
do it are publicly available. After trying to fit these
three distribution to data in generation 1 and 50, we
analyzed goodness-of-fit using the same package and
the gofstat function. This function yields several
measures of goodness, including the Akaike Informa-
tion Criterion and the Kolmogorov-Smirnov statistic.
What we found was that, in all cases, Gamma is
the distribution that better fits the data. That does not
mean that the noise effectively follows this distribu-
tion, but that if it can be said to follow one, it’s this
one. In fact, just a few individuals have a good fit (to
95% accuracy using the Kolmogorov-Smirnov), and
none of them in generation 50. The fit for an individ-
ual in the first generation that does follow that distri-
bution (individual 8) is shown in figure 2.
This figure also shows that, even if it is skewed,
its skewness is not too high which makes it close to
the standard distribution (which is considered a good
approximation if k ¿ 10).
Some interesting facts that can be deduced from
these measures is that in general, fitness is skewed and
has a high value. Besides, it follows a gamma distri-
bution, which, if we wan to model noise accurately,
should be the one used. However, we are rather inter-
ested in the overall shape of noise so since the skew-
ness value of the gamma distribution is rather high we
will use, in this paper, a Gaussian noise to simulate it.
This will be used in the experiments shown below.
4 FITNESS MEMORY AND
STATISTICAL SIGNIFICANT
DIFFERENCES
As indicated in previous section, most explicit aver-
aging methods use several measures to compute fit-
ness as an average, with resampling, that is, additional
measures, in case comparisons are not statistically
significant. In this paper we will introduce a fitness
memory, which amounts to a resampling every gen-
eration an individual survives. An individual is born
with a fitness memory of a single value, with memory
size increasing with survival time. This is actually a
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
78
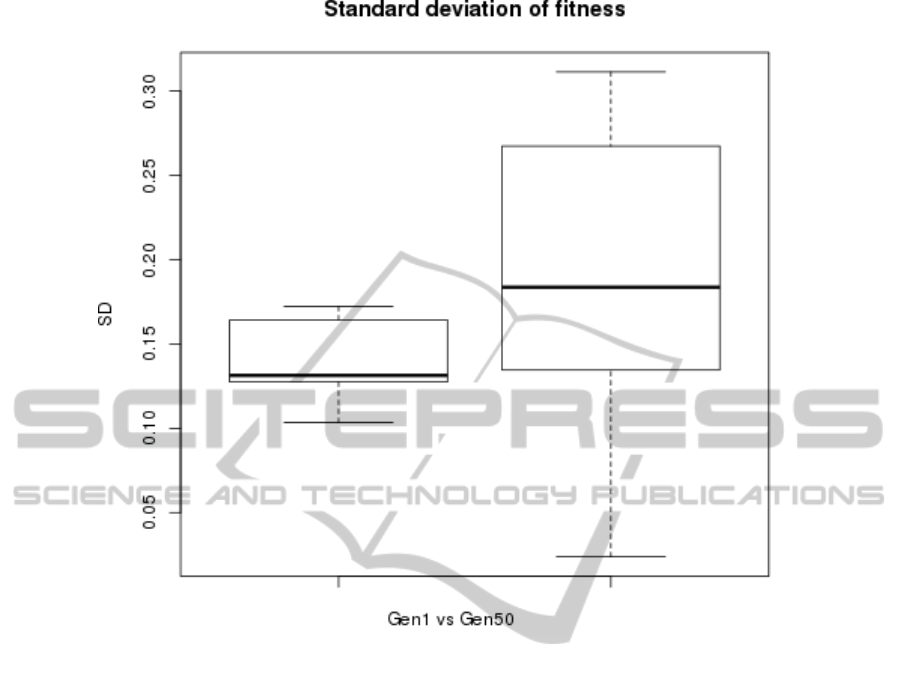
Figure 1: Boxplot of standard deviation of noise fitted to a normal distribution, left for the first generation and right for the
50th. Fitness averages around 1.
combination of an implicit and an explicit evaluation
strategy: younger individuals are rejected outright if
their fitness computed after a single evaluation is not
enough to participate in the pool, while older ones use
several measures to compute average fitness, which
means that averages will be a more precise represen-
tation of actual value. As evolution proceeds, the best
individuals will, effectively, have an underlying non-
noisy best value. We will call this method incremental
temporal average or ITA.
However, since average is a single value, selec-
tion methods might, in fact, select as better individ-
uals some that are not if the comparison is not sta-
tistically significant; this will happen mainly in the
first and middle stages of search, which might effec-
tively eliminate from the pool or not adequately rep-
resent individuals that constitute, in fact, good solu-
tions. That is why we introduce an additional feature:
using Wilcoxon test (Wilcoxon, 1945) for comparing
not the average, but all fitness values attached to an
individual. This second method introduces a partial
order in the population pool: two individuals might
be different (one better than the other) or not. There
are many possible ways of introducing this partial or-
der in the evolutionary algorithm; however, what we
have done is to pair individuals a certain number of
times (10, by default) and have every individual score
a point every time it is better than the other in the cou-
ple; it will get a point less if it is the worse one. An
individual that is better that all its couples will have a
fitness of 20; one whose comparisons are never signif-
icant according to the Wilcoxon test will score exactly
10, the same as if it wins as many times as it loses,
and the one that always loses will score 0. We will
call this method Wilcoxon-test based partial order, or
WPO for short.
Initial tests, programmed in Perl using
Algorithm::Evolutionary (Merelo-Guervs
et al., 2010) and available with an open source license
at http://git.io/a-e were made with these two types of
algorithms and the Trap function (Merelo-Guervs;,
2014), showing the best results for the WPO method
and both of them being better that the implicit
average method that uses a single evaluation per
individual, although they needed more time and
memory. Since it does not need to perform averages
StudyingandTacklingNoisyFitnessinEvolutionaryDesignofGameCharacters
79
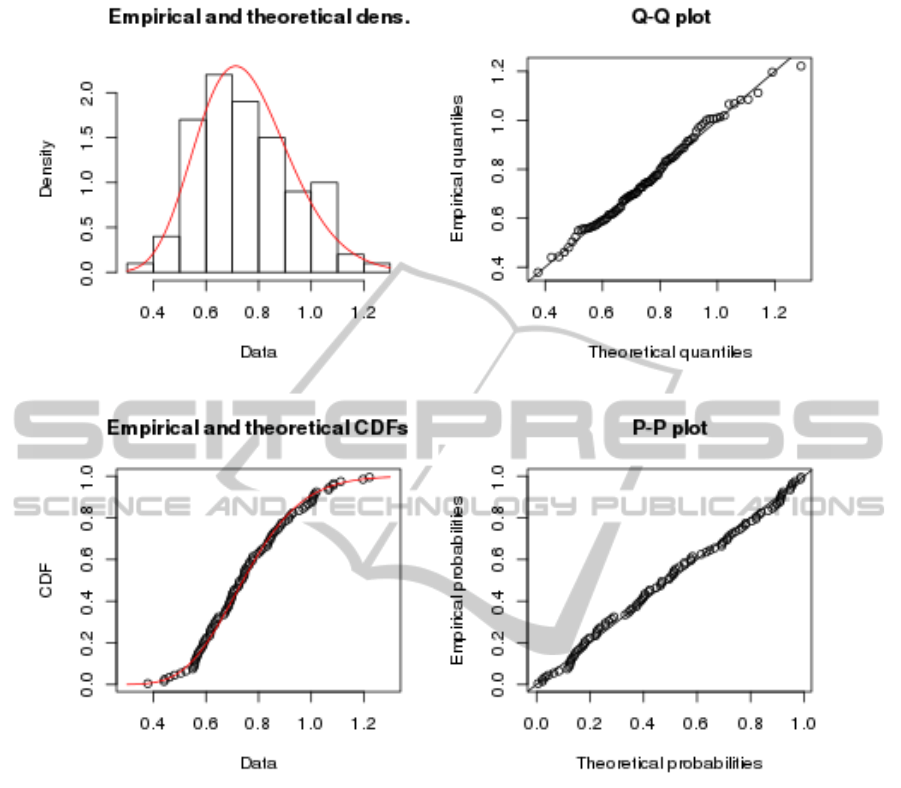
Figure 2: Fit of the fitness value of an individual in the first generation of the evolutionary algorithm to a gamma distribution,
showing an histogram in the top left corner, CDFs in the bottom left corner and quantile-quantile and percentile-percentile
plots in the right hand side.
or make additional fitness measures every generation,
it is twice as fast as the next method, the one that uses
explicit average fitness. An exploration of memory
sizes (published in http://jj.github.io/Algorithm-
Evolutionary/graphs/memory/ and shown in Figure 3
for a typical run) showed that they are distributed un-
evenly but, in general, there is no single memory size
overcoming all the population. Besides, distribution
of fitness, published at http://jj.github.io/Algorithm-
Evolutionary/graphs/fitness-histo/ shows a distribu-
tion with most values concentrated along the middle
(that is, fitness equal to 10 or individuals that cannot
be compared with any other, together with a few
with the highest fitness and many with the lowest
fitness. Besides showing that using the partial order
for individual selection is a valid strategy, it also
shows that a too greedy selection method would
eliminate many individuals that might, in fact, have
a high fitness. This will be taken into account
when assigning parameter values to the evolutionary
algorithm that will be presented next.
5 RESULTS
ITA and WPO have been tested using two well-known
benchmarks, the deceptive bimodal Trap (Deb and
Goldberg, 1992) function and the Massively Mul-
timodal Deceptive Problem (Goldberg et al., 1992)
(MMDP). We chose to use just these two functions
were chosen because they have different fitness land-
scapes, are usually difficult for an evolutionary algo-
rithm and have been extensively used for testing other
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
80
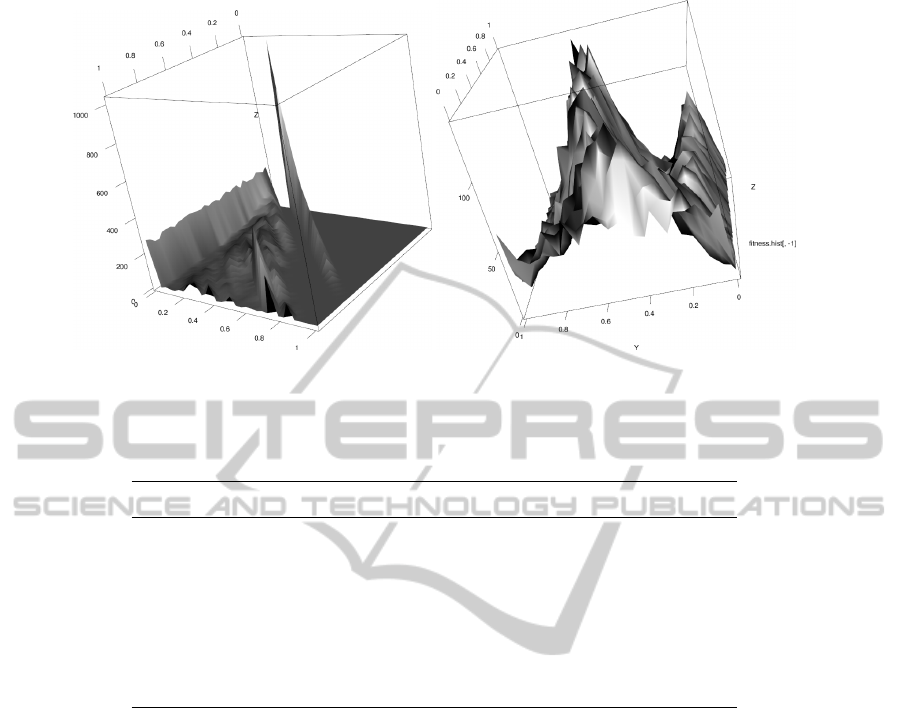
(a) Memory size (b) Fitness distribution
Figure 3: (Left) 3D plot of the distribution of memory sizes for a single execution of the Wilcoxon-test based partial order.
(Right) 3d plot of the distribution of fitness values along time for the WPO method on the Trap function.
Table 1: Common evolutionary algorithm parameters.
Parameter Value
Chromosome length 40 (Trap) 60 (MMDP)
Population size 1024
Selection 2 tournament selection
Replacement rate 50%
Mutation rate 20%
Crossover rate 80%
Max evaluations 200K (Trap) 1 Million(MMDP)
Stopping criterion Non-noisy best found or max evaluations reached
kind of operators and algorithms.
Several methods were tested: a baseline algorithm
without noise to establish the time and number of
evaluations needed to find the solution, a 0-memory
(implicit average) method that uses noisy fitness with-
out making any special arrangement, ITA and WPO.
Evolutionary algorithm parameters and code for all
tests were the same, except in one particular case: we
used 2-tournament with 50% replacement, 20% muta-
tion and 80% crossover, p = 1024 and stopping when
the best was found or number of evaluations reached.
This was 200K for the Trap, which used 40 as chro-
mosome size, and 1M for MMDP, which used 60 as
chromosome size; these parameters are shown in Ta-
ble 1. We have also used an additive Gaussian noise
centered in zero and different σ, which is indepen-
dent of the range of variation of the fitness values. By
default, noise will follow a normal distribution with
center in 0 and σ = 1.
All tests use the Algorithm::Evolutionary li-
brary, and the scripts are published, as above, in the
GitHub repository, together with raw and processed
results. The evolutionary algorithm code used in all
cases is exactly the same except for WPO, which,
since it needs the whole population to evaluate fit-
ness, needed a special reproduction and replacement
library. This also means that the replacement method
is not exactly the same: while WPO replaces every
generation 50% of the individuals, the rest evaluate
new individuals before replacement and eliminate the
worst 512 (50% of the original population). Replace-
ment is, thus, less greedy in the WPO case, but we
do not think this will be a big influence on result
(although it might account for the bigger number of
evaluations obtained in some cases), besides, it just
needed a small modification of code and was thus pre-
ferred for that reason. All values shown are the result
of 30 independent runs.
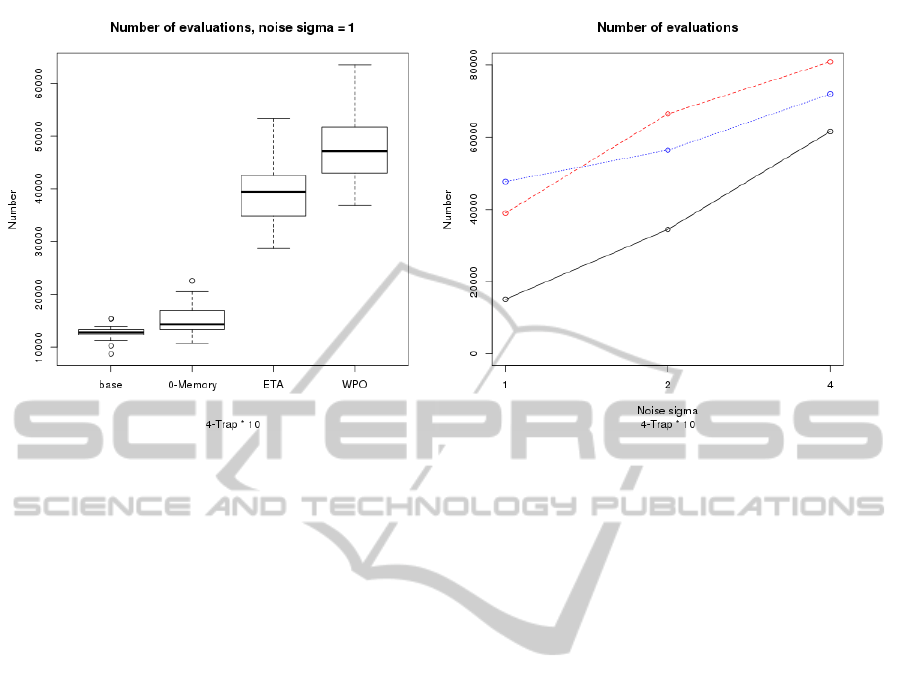
The results for different noise levels are shown in
Figure 4. The boxplot on the left hand side compares
the number of evaluations for the baseline method
and the three methods with σ = 1. The implicit av-
erage method (labelled as 0-memory) is only slightly
worse than the baseline value of around 12K evalua-
StudyingandTacklingNoisyFitnessinEvolutionaryDesignofGameCharacters
81
(a) Memory size (b) Fitness distribution
Figure 4: (Left) Comparison of number of evaluations for the 4-Trap x 10 function and the rest of the algorithms with a
noise σ equal to 1. (Right). Plot of average number of evaluations for different methods: 0 memory (black, solid), ITA (red,
dashed), WPO (blue, dot-dashed).
tions, with the ITA and WPO methods yielding very
similar values which are actually worse than the 0-
memory method. However, the scenario on the right,
which shows how the number of evaluations scales
with the noise level, is somewhat different. While the
0-memory method still has the smallest number of
evaluations for successful runs, the success rate de-
grades very fast, with roughly the same and slightly
less than 100% for σ = 2 but falling down to 63% for
0-memory and around 80% for ITA and WPO (86%
and 80%). That is, best success rate is shown by the
ITA method, but the best number of evaluations for
roughly the same method is achieved by WPO.
These results also show that performance de-
grades quickly with problem difficulty and the de-
gree of noise, that is why we discarded the 0-memory
method due to its high degree of failure (a high per-
centage of the runs did not find the solution) with
noise = 10% max fitness and evaluated ITA and WPO
over another problem, MMDP with similar absolute
σ, with the difference that, in this case, σ = 2 would
be 20% of the max value, which is close to the one
observed experimentally, as explained in the Section
3.
The evolutionary algorithm for MMDP used ex-
actly the same parameters as for the Trap function
above, except the max number of evaluations, which
was boosted to one million. Initial tests with the 0-
memory method yielded a very low degree of suc-
cess, which left only the two methods analyzed in this
paper for testing with MMDP. Success level was in
all cases around 90% and very similar in all exper-
iments; the number of evaluations is more affected
by noise and shown in Figure 5. In fact, WPO and
ITA have a very similar number of evaluations. It is
statistically indistinguishable for σ = 2, and different
only at the 10% level (p-value = 0.09668) for σ = 1,
however, if we take the time needed to reach solu-
tions into account, ITA is much faster since it does
not apply 10*1024 statistical tests every generation.
However, WPO is more robust, with a lower standard
deviation, in general, at least for high noise levels.
However, both methods obtain a good result with a
much higher success rate than the implicit fitness (0-
memory) method. Besides, ITA and APO incorporate
explicit fitness evaluation naturally into the popula-
tion resampling only surviving individuals. This ac-
counts for a predictable behaviour of the algorithm,
since the number of evaluations per generation is ex-
actly the population size, which is important for opti-
mization processes with a limited budget.
6 CONCLUSIONS
In this paper we have introduced two methods to deal
with the problem of noisy fitness functions. The two
methods, ITA, based on re-evaluation of surviving in-
dividuals and WPO, which uses the Wilcoxon test
to compare a sample of individuals and partial-order
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
82
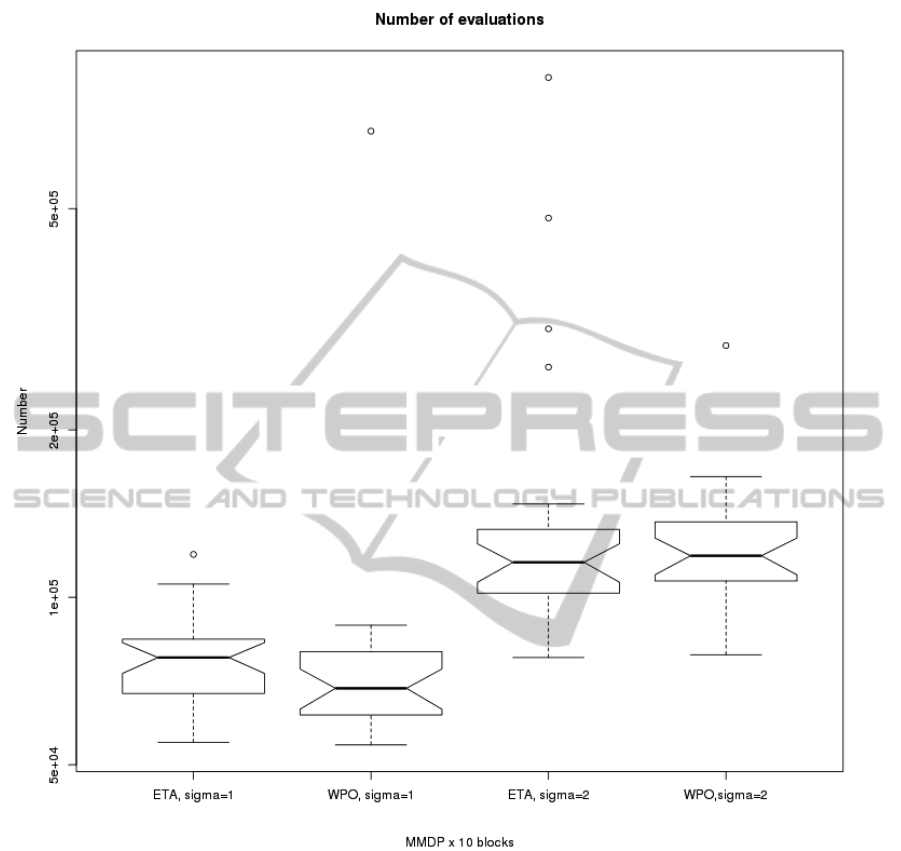
Figure 5: Number of evaluations for successful runs ITA and WPO needed for solving the MMDP problem with 6 blocks and
different noise levels, σ = 1, 2.
them within the population, have been tested over two
different fitness functions and compared with implicit
average (or 0-memory) methods, as well as among
themselves. In general, memory-based methods have
much higher success rate than 0-memory methods
and the difference increases with the noise level, with
0-memory methods crashing at noise levels close to
20% while ITA and WPO maintain a high success
level.
It is difficult to choose between the two proposed
methods, ITA and WPO. However, ITA is much faster
since it avoids costly comparisons. It also has a
slightly higher success rate, and the number of eval-
uations it needs to find the solution is only slightly
worse; even if from the point of view of the evolu-
tionary algorithm it is slightly less robust and slightly
worse, it compensates the time needed to make more
evaluations with the fact that it does not need to per-
form statistical tests to select new individuals.
However, this research is in initial stages. The fact
that we are using a centrally distributed noise gives
ITA an advantage since, in fact, comparing the mean
of two individuals will be essentially the same as do-
ing a statistical comparison, since when the number
of measures is enough, statistical significance will be
reached. In fact, with a small difference ITA might
select as better an individual whose fitness is actually
the same, something that would be correctly spotted
StudyingandTacklingNoisyFitnessinEvolutionaryDesignofGameCharacters
83
by WPO, but, in fact, since there is an average selec-
tive pressure this is not going to matter in the long
run.
It might matter in different situations, for instance
in numerical optimization problems and also when
noise follows an uniform distribution; behavior might
in this case be similar to when noise levels are higher.
These are scenarios that are left for future research,
and destined to find out in which situations WPO is
better than ITA and the other way round.
Besides exploring noise in different problems and
modelling its distribution, we will explore different
parameters. The first one is the number of compar-
isons in WPO. Initial explorations have proved that
changing it from 5 to 32 does not yield a signifi-
cant difference. Looking for a way to speed up this
method would also be important since it would make
its performance closer to ITA. Memory size could also
be explored. Right now evaluations are always per-
formed, but in fact after a number of evaluations are
done comparisons will be statistically significant; it
is difficult to know, however, which is this number,
but in long runs it would be interesting to cap fitness
memory size to a sensible number, or, in any case, see
the effect of doing it.
ACKNOWLEDGEMENTS
This work has been supported in part by project
ANYSELF (TIN2011-28627-C04-02 and -01). The
authors would like to thank the FEDER of Euro-
pean Union for financial support via project ”Sistema
de Informacin y Prediccin de bajo coste y autnomo
para conocer el Estado de las Carreteras en tiempo
real mediante dispositivos distribuidos” (SIPEsCa) of
the ”Programa Operativo FEDER de Andaluca 2007-
2013”. We also thank all Agency of Public Works of
Andalusia Regional Government staff and researchers
for their dedication and professionalism.
Our research group is committed to Open Sci-
ence and the writing and development of this pa-
per has been carried out in GitHub at this address
https://github.com/JJ/wilcoxon-ga-ecta. We encour-
age you to visit, comment and to all kind of sugges-
tions.
Miller, B. L. and Goldberg, D. E. (1996). Ge-
netic algorithms, selection schemes, and the
varying effects of noise. Evolutionary Com-
putation, 4(2):113–131.
Mora, A. M., Fern´andez-Ares, A., Guerv´os, J.
J. M., Garc´ıa-S´anchez, P., and Fernandes,
C. M. (2012). Effect of noisy fitness in real-
time strategy games player behaviour opti-
misation using evolutionary algorithms. J.
Comput. Sci. Technol., 27(5):1007–1023.
Mora, A. M., Montoya, R., Merelo, J. J., S´anchez,
P. G., Castillo, P. A., Laredo, J. L. J.,
Mart´ınez, A. I., and Espacia, A. (2010).
Evolving bot´s ai in unreal. In di Chio et
al., C., editor, Applications of Evolutionary
Computing, Part I, volume 6024 of Lecture
Notes in Computer Science, pages 170–179,
Istanbul, Turkey. Springer-Verlag.
Qian, C., Yu, Y., and Zhou, Z.-H. (2013). Ana-
lyzing evolutionary optimization in noisy en-
vironments. CoRR, abs/1311.4987.
Rada-Vilela, J., Johnston, M., and Zhang, M.
(2014). Population statistics for particle
swarm optimization: Resampling methods
in noisy optimization problems. Swarm and
Evolutionary Computation, 0(0):–. In press.
Rudolph, G. (2001). A partial order approach to
noisy fitness functions. In Proceedings of the
IEEE Conference on Evolutionary Computa-
tion, ICEC, volume 1, pages 318–325.
Wilcoxon, F. (1945). Individual comparisons
by ranking methods. Biometrics Bulletin,
1(6):80–83.
REFERENCES
Aizawa, A. N. and Wah, B. W. (1994). Scheduling of ge-
netic algorithms in a noisy environment. Evolutionary
Computation, 2(2):97–122.
Castillo, P. A., Gonz
´
alez, J., Merelo-Guerv
´
os, J.-J., Prieto,
A., Rivas, V., and Romero, G. (1999). G-Prop-III:
Global optimization of multilayer perceptrons using
an evolutionary algorithm. In GECCO-99: Proceed-
ings Of The Genetic And Evolutionary Computation
Conference, page 942.
Cauwet, M.-L., Liu, J., Teytaud, O., et al. (2014). Al-
gorithm portfolios for noisy optimization: Compare
solvers early. In Learning and Intelligent Optimiza-
tion Conference.
Costa, A., Vargas, P., and Tin
´
os, R. (2013). Using explicit
averaging fitness for studying the behaviour of rats in
a maze. In Advances in Artificial Life, ECAL, vol-
ume 12, pages 940–946.
Deb, K. and Goldberg, D. E. (1992). Analyzing deception
in trap functions. In FOGA, volume 2, pages 98–108.
Garc
´
ıa-Ortega, R. H., Garc
´
ıa-S
´
anchez, P., and Merelo,
J. J. (2014). Emerging archetypes in massive
artificial societies for literary purposes using ge-
netic algorithms. ArXiv e-prints. Available at
http://adsabs.harvard.edu/abs/2014arXiv1403.3084G.
Goldberg, D. E., Deb, K., and Horn, J. (1992). Massive
multimodality, deception, and genetic algorithms. In
R. M
¨
anner and Manderick, B., editors, Parallel Prob-
lem Solving from Nature, 2, pages 37–48, Amsterdam.
Elsevier Science Publishers, B. V.
Jin, Y. and Branke, J. (2005). Evolutionary optimization
in uncertain environments - a survey. IEEE Trans-
actions on Evolutionary Computation, 9(3):303–317.
cited By (since 1996)576.
Jun-hua, L. and Ming, L. (2013). An analysis on con-
vergence and convergence rate estimate of elitist ge-
netic algorithms in noisy environments. Optik - In-
ternational Journal for Light and Electron Optics,
124(24):6780 – 6785.
Liu, J., Saint-Pierre, D. L., Teytaud, O., et al. (2014). A
mathematically derived number of resamplings for
noisy optimization. In Genetic and Evolutionary
Computation Conference (GECCO 2014).
Merelo-Guerv
´
os, J.-J., Prieto, A., and Mor
´
an, F.
(2001). Optimization of classifiers using ge-
netic algorithms, chapter 4, pages 91–108. MIT
press. ISBN: 0262162016; draft available from
http://geneura.ugr.es/pub/papers/g-lvq-book.ps.gz.
Merelo-Guervs;, J.-J. (2014). Using a Wilcoxon-test
based partial order for selection in evolutionary
algorithms with noisy fitness. Technical report,
GeNeura group, university of Granada. Available at
http://dx.doi.org/10.6084/m9.figshare.974598.
Merelo-Guervs, J.-J., Castillo, P.-A., and Alba, E. (2010).
Algorithm::Evolutionary, a flexible Perl mod-
ule for evolutionary computation. Soft Computing,
14(10):1091–1109. Accesible at http://sl.ugr.es/000K.
Miller, B. L. and Goldberg, D. E. (1996). Genetic algo-
ECTA2014-InternationalConferenceonEvolutionaryComputationTheoryandApplications
84

rithms, selection schemes, and the varying effects of
noise. Evolutionary Computation, 4(2):113–131.
Mora, A. M., Fern
´
andez-Ares, A., Guerv
´
os, J. J. M.,
Garc
´
ıa-S
´
anchez, P., and Fernandes, C. M. (2012). Ef-
fect of noisy fitness in real-time strategy games player
behaviour optimisation using evolutionary algorithms.
J. Comput. Sci. Technol., 27(5):1007–1023.
Mora, A. M., Montoya, R., Merelo, J. J., Snchez, P. G.,
Castillo, P. A., Laredo, J. L. J., Martnez, A. I., and
Espacia, A. (2010). Evolving bot
´
s ai in unreal. In
di Chio et al., C., editor, Applications of Evolutionary
Computing, Part I, volume 6024 of Lecture Notes in
Computer Science, pages 170–179, Istanbul, Turkey.
Springer-Verlag.
Qian, C., Yu, Y., and Zhou, Z.-H. (2013). Analyzing evo-
lutionary optimization in noisy environments. CoRR,
abs/1311.4987.
Rada-Vilela, J., Johnston, M., and Zhang, M. (2014). Popu-
lation statistics for particle swarm optimization: Re-
sampling methods in noisy optimization problems.
Swarm and Evolutionary Computation, 0(0):–. In
press.
Rudolph, G. (2001). A partial order approach to noisy fit-
ness functions. In Proceedings of the IEEE Confer-
ence on Evolutionary Computation, ICEC, volume 1,
pages 318–325.
Wilcoxon, F. (1945). Individual comparisons by ranking
methods. Biometrics Bulletin, 1(6):80–83.
StudyingandTacklingNoisyFitnessinEvolutionaryDesignofGameCharacters
85
