
Collision Avoidance of Intelligent Vehicle
based on Networked High-speed Vision System
Masahiro Hirano
1
, Akihito Noda
2
, Yuji Yamakawa
1
and Masatoshi Ishikawa
1
1
Graduate School of Information Science and Technology, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
2
Graduate School of Frontier Science, The University of Tokyo
5-1-5 Kashiwanohara, Kashiwa-shi, Chiba 277-8561, Japan
Keywords:
Networked High-speed Vision, Collision Avoidance, Intelligent Vehicle.
Abstract:
We propose a driving safety support system (DSSS) that employs a high-speed vision system installed in
the environment surrounding, for instance, highways, urban roads, and intersections. The aim of the system
is to recognize potentially dangerous traffic situations, including those that are undetectable from a moving
vehicle, and to use this information for supporting safe driving. The system consists of a vision network
of synchronized high-speed cameras that are capable of acquiring images at one-millisecond intervals, and
vehicles that are capable of communicating with this network through communication hubs. We conducted
collision avoidance experiments and demonstrated that, by introducing high-speed vision, the proposed system
can resolve the issue of slow reaction time, which is common to environmental vision systems.
1 INTRODUCTION
Intelligent transport systems (ITSs) have been de-
veloped rapidly in response to the increasing need
for safe, economical, and environment-friendly trans-
portation around the world. In Europe for instance,
the “Europe 2020” action plan drawn up by the the
Commission of the European Community, includes
modernization of transport systems, utilization of in-
formation and communication technology, and so
forth. Also in Japan, the government has been a driv-
ing force towards realizing the world’s safest transport
systems and has outlined several quantitative indica-
tors that will be used for evaluating the efficiency of
these systems.
To meet such demands, a large number of systems
havebeen proposed for various applications, like driv-
ing safety support. We, however, do not believe that
this approach, i.e. to design a system for solving ex-
isting problems, is the right one. On the contrary, we
believe that a better approach is to have the design of
an ITS as the starting point.
Driving safety support systems based on vi-
sion systems installed on vehicles have been pro-
posed (Cherng et al., 2009). However, it is imprac-
tical to require that all vehicles be equipped with vi-
sion units. A more practical and feasible approach is
Readiness (evaluated by maximum delay)
Field-of-view of vision system
Standard
environmental
vision
High-speed
environmental
vision
This research
Onboard vision
Figure 1: The purpose of this research.
t
o consider a vision system installed in the environ-
ment, for example, roadsides.
It is widely considered that the introduction of
driving safety support systems based on interac-
tions between vehicles and the environment will con-
tribute in a major way to achieving the goals men-
tioned above (Papadimitratos and Evenssen, 2009;
Kim and Kim, 2009). For instance, studies have
shown that vehicle-based vision systems are inferior
to environment-based vision systems in some cases,
for instance, when detecting potential dangers around
539
Hirano M., Noda A., Yamakawa Y. and Ishikawa M..
Collision Avoidance of Intelligent Vehicle based on Networked High-speed Vision System.
DOI: 10.5220/0005100105390544
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 539-544
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

high-speed
camera
Communication
Station
Vehicle
Analysis
Server
Figure 2: Proposed driving safety support system for colli-
sion avoidance.
corners, or on highways when the driver’s sight is lim-
ited by large trucks (Vceraraghavan et al., 2002).
However, an environment-basedsystem providing
information about potential obstacles involves a long
reaction time, which is a serious drawback in time-
critical situations like collision avoidance. Consider-
ing a situation in which a pedestrian runs out in front
of a vehicle from behind a parked vehicle, it is diffi-
cult to avoid a collision with the pedestrian by using
an environment-based vision system alone.
We propose a novel system employing environ-
mental high-speed cameras installed in areas with
frequent traffic accidents, such as blind intersections
and highways. This camera network forms a vi-
sion system synchronized for sub-millisecond com-
munication, a system that we call the “Networked
High-speed Vision System“ (Noda et al., 2014). This
system can overcome the deficiencies in standard
environment-based vision systems, as detailed in Sec-
tion 2. The concept of our study is illustrated in Fig-
ure 1.
The system used in this research consists of two
high-speed cameras connected to image processing
workstations, which are connected via a network.
Furthermore, there is a communication station for
broadcasting information to vehicles about the sur-
rounding traffic situation, including obstacles around
them and other vehicles. The cameras are installed
in such a way that the field-of-view of one camera
slightly overlaps with that of the other.
With this set-up it is possible to have a large de-
tection range for vehicles moving at high speed and
obstacles, even if they are not visible by the same
camera. The high-speed vehicles are equipped to re-
ceive information about obstacles detected by the vi-
sion system, and to take appropriate action, like colli-
sion avoidance.
In the remainder of this paper, we describe the
proposed driving safety support system designed for
installation on a highway and present results of ex-
Obstacle recognition & transmission
Frame acquisition
33 [ms] 15 [ms]
48 [ms]
Obstacle emergence
Environmental
vision
Vehicle
Time [ms]
Obstacle information reception
Figure 3: Timing diagram of environmental vision system
using standard camera (30 fps).
periments conducted for verifying the effectiveness of
this system, specifically, collision avoidance experi-
ments using vision systems that capture images at dif-
ferent frame rates (30 frames per second (fps) and 600
fps).
2 PROPOSED SYSTEM
2.1 Networked High-speed Vision
System
Networked high-speed vision systems have previ-
ously been proposed (Noda et al., 2013; Noda et al.,
2014). In this subsection, we give a short overview of
the system.
The networked high-speed vision system con-
sists of multiple high-speed cameras and PCs which
are connected via a network. These cameras have
partly overlapping fields-of-view and observe the en-
tire space of interest. The PCs are synchronized to
sub-millisecond order by using the software-based
precision time protocol (PTP). When applying this
system to object tracking, the data transmitted in the
network includes the position of the tracked target and
the timestamp when the frame is acquired.
Thanks to the high acquisition rate, target track-
ing can be realized by a simple computer algorithm.
This system is designed to be used in a number of sit-
uations, including highways and intersections. The
main target of the system is to track objects mov-
ing in the field of view. For this purpose, back-
ground subtraction is an appropriate algorithm be-
cause it can be executed with low computational load.
Since the cameras are calibrated, homography matri-
ces for transforming the cameras’ coordinate systems
into a common world coordinate system can be ob-
tained. Each target can be identified by its position in
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
540

Obstacle recognition
33 [ms]
Frame acquisition
Obstacle emergence
Vehicle with
onboard vision
Time [ms]
Figure 4: Timing diagram of onboard vision system using
standard camera (30 fps).
Obstacle recognition & transmission
Frame acquisition
1.6 [ms]
15 [ms]
16.6 [ms]
Obstacle emergence
Environmental
high-speed vision
Vehicle
Time [ms]
Obstacle information reception
Figure 5: Timing diagram of environmental high-speed vi-
sion system using high-speed camera (600 fps).
the previous frame due to the small movement of the
target during short frame interval of the high-speed
cameras. The main tasks of the CPU include back-
ground subtracting, binarization, calculating the im-
age centroid, and so on, which enables tracking to be
completed within a 1-millisecond frame interval.
2.2 Proposed Driving Safety Support
System
Networked High-speed Vision Systems have a broad
range of applications in ITS. As a result of the con-
figuration detailed in the previous section, the system
enables us to recognize every traffic situation at a high
frame rate. One of the advantages of this system is
that, since it can robustly track vehicles on a highway,
we can obtain abundant traffic data with high accu-
racy even for vehicles that are not equipped with spe-
cial sensors. Therefore, this system can be applied to
efficient traffic planning and control by surveillance
and analysis of traffic congestion or accidents.
The networked vision system is designed to have
high-speed cameras with overlapping fields-of-view
in order to provide full coverage of the area in ques-
tion. The function of the system is to simultaneously
detect vehicles and obstacles on the road. As a re-
sult, it provides vehicles with traffic information and
“obstacle maps”, which represent the locations of ob-
stacles in relation to the target vehicle, through the
communication station. The vehicles can then decide
whether to take appropriate action, like sudden brak-
ing or steering, in response to the incoming informa-
tion.
In general, an environment-based vision system
can monitor a larger area compared with an onboard
vision system. It is possible to recognize, at an early
stage, different traffic situations involving surround-
ing vehicles and obstacles. However, an additional
delay is inevitably introduced in the wireless commu-
nication. Consider for instance a situation where a
child suddenly runs in front of a vehicle. In this case,
the low responsiveness is a limiting factor in tradi-
tional environment-based vision systems.
Moreover, if an obstacle emerges just after a frame
is acquired, there is a 33 ms delay in detecting the ob-
stacle, assuming the standard frame rate of 30 fps for
standard cameras. Figure 3 illustrates the total delay
between detection and the vehicle receiving this in-
formation: 33 ms for detection and 15 ms for system-
to-vehicle communication.
On the other hand, when a standard camera is in-
stalled in the vehicle, there is no delay due to commu-
nication. Therefore, as illustrated in Figure 4, there
can be a delay of up to 33 ms in such a system.
In contrast, by introducinghigh-speedcameras ca-
pable of image acquisition at 600 fps, the detection
delay can be reduced to 1.6 ms. Figure 5 illustrates
that vehicles can recognize obstacles within 16.6 ms
after an obstacle emerges, including the delay due to
communication.
To summarize, the proposed driving safety sup-
port system for high-speed vehicles based on an en-
vironmental high-speed vision system can recognize
traffic situations in the entire area of coverage, and at
the same time can achieve the same high responsive-
ness as standard on-board vision systems.
3 COLLISION AVOIDANCE
RULES
The networked high-speed vision system installed on
a highway provides information about objects, like
other vehicles and obstacles, to each of the vehicles
in the covered area simultaneously. It generates an
obstacle map from the viewpoint of each target vehi-
cle. In the case of a highway, the obstacle map will
include distances from the target vehicle to obstacles,
including an indication of which traffic lanes the ob-
stacles are in. The system generates one obstacle map
per vehicle on the highway. Since the proposed sys-
tem uses high-speed vision, the distances that the ve-
CollisionAvoidanceofIntelligentVehiclebasedonNetworkedHigh-speedVisionSystem
541
Robocar
High-speed
camera
Figure 6: Experimental setup.
hicles move between frames can be significantly re-
duced (Ishii and Ishikawa, 1999).
Obstacle maps generated by the networked high-
speed vision system are distributed to the correspond-
ing vehicles through a wireless network. Each ve-
hicle selects collision avoidance rules from a set of
pre-programmed rules, based on the received obsta-
cle map. When an obstacle suddenly appears in front
of a vehicle, it is commonly known that collision
avoidance by steering is more effective than a sudden
stop (Keller et al., 2011).
In the work described in this paper, we assumed
such a situation and adopted collision avoidance
by steering. More precisely, the vehicle was pro-
grammed to start the avoidance maneuver by steering
in a certain direction when the distance to the obstacle
is less than a pre-defined threshold. The vehicle then
drives in a straight line for a fixed time period and fi-
nally steers back in the opposite direction, which will
place it in the neighboring lane.
4 EXPERIMENTAL SETUP
We conducted an experiment to show the effective-
ness of the proposed driving safety support system.
The system used in this experiment consisted of a
1/10-scale vehicle, two networked high-speed cam-
eras attached to workstations, and a communication
station. The system is shown in Figure 6. The ve-
hicle used in this experiment was a robotic car re-
search platform called “RoboCar 1/10”, provided by
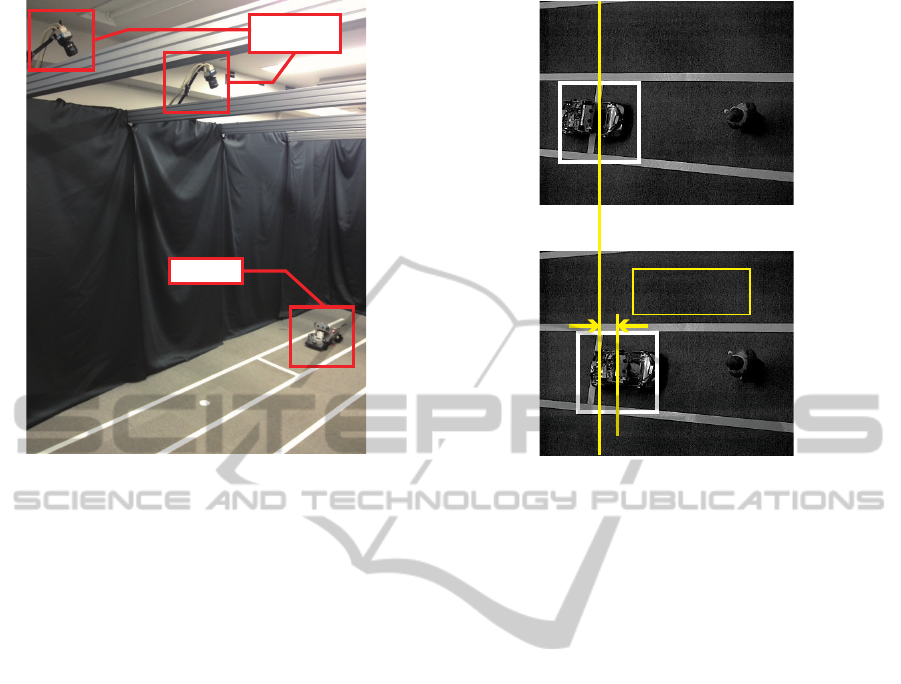
55 [mm]55 [mm]
Figure 7: The upper figure shows an image captured by one
of the high-speed environmental cameras when the system
recognized that the distance to the obstacle fell below the
threshold. The lower figure shows the same situation for a
standard environmental camera.
ZMP (ZMP, 2014). RoboCar has a realtime operat-
ing system (a customized version of Linux), control-
ling its steering and communication modules. It com-
municates with the communication station via a Wifi
connection (IEEE 802.11g).
The obstacle map contained two 32-bit integer
variables per obstacle, where one represented the dis-
tance from the vehicle to the obstacle, and the other
represented the number of the lane that the obstacle
resided in. We limited one obstacle map to contain-
ing at most 50 obstacles, meaning that the size of one
packet (including header and payload) was 512 bytes,
since the payload was 4*2*50 bytes = 400 bytes.
We conducted a preliminary experiment to mea-
sure the round-trip time of a 512-byte packet between
RoboCar and the communication station. The mea-
sured times ranged from 5 ms to 30 ms, indicating a
one-way time of 2.5 ms to 15 ms. This result is in
agreement with the assumptions made in Section 2.
5 EXPERIMENTS
We conducted an experiment to validate the effective-
ness of the proposed system. The setup is illustrated
in Figure 6. In this experiment, we assumed a situ-
ation where a person suddenly jumps out in front of
the vehicle from the roadside onto the highway. Since
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
542

T = 0.4 [s]
T = 0.5 [s]
T = 0.1 [s]
T = 0.2 [s]
T = 0 [s]
T = 0.3 [s]
Avoid obstacleAvoid obstacle
Figure 8: Experimental results for the high-speed environmental vision system.
T = 0.4 [s] T = 0.5 [s]
T = 0.1 [s]
T = 0.2 [s]
T = 0 [s]
T = 0.3 [s]
Collide with obstacleCollide with obstacle
Figure 9: Experimental results for the standard environmental vision system.
the speed of a person on the highway can be consid-
ered to be considerably lower than the vehicles on that
highway, we modeled the person as a static obstacle.
In the experiment, we assumed a situation in which
the person (obstacle) that suddenly appeared was de-
tected by the system around 800 mm in front of the
vehicle.
To illustrate the effectiveness of the proposed sys-
tem, we conducted two experiments. In the first ex-
periment, we used standard environmental cameras
with standard frame rates of 30 fps. In the second
experiment, we introduced a high-speed environmen-
tal vision system with a frame rate of around 600 fps.
The results of the experiments are shown in Figures 8
and 9. The vehicle received the obstacle map trans-
mitted by the networked vision system, after which
it took action based on a preprogrammed collision
avoidance rule. The collision avoidance rule adopted
in this experiment was as follows:
1. Start steering at an angle of 30 degrees when the
distance from the vehicle to the obstacle falls
below the threshold (800 mm) and keep that
heading for time T
1
.
2. Keep going straight for time T
2
.
3. Steer at an angle of -30 degree for time T
1
in order
to come back to the neighboring driving lane.
CollisionAvoidanceofIntelligentVehiclebasedonNetworkedHigh-speedVisionSystem
543

Considering the time required for an evasive ma-
neuver,it is even more important to detect the obstacle
at an early stage. The standard environmental vision
system could recognize the vehicle when it overshot
the threshold by 55 mm. In Figure 7, this threshold
is indicated with a white line drawn 800 mm from the
obstacle. In contrast, the proposed system could rec-
ognize the vehicle just after it reached the line.
When a collision occurred in the case of the stan-
dard environmental vision system, the vehicle had a
velocity of 7.2 kilometers per hour (km/h) (=1.8 mil-
limeters per millisecond (mm/ms)). Therefore, the
delay for recognition in the standard vision system
can be estimated to be 55/1.8 ≃ 30.5 ms. For this
reason, collision avoidance fails with the standard vi-
sion system, whereas it succeeds with the proposed
system.
In this experiment, the vehicle started the evasive
maneuver when the distance from the vehicle to the
obstacle fell below 800 mm. This distance is equiva-
lent to 8 m at actual scale. It is known that vehicles
must maintain at least 58 m intervals between them
for safe driving, which is around 7 times longer than
8 m.
6 CONCLUSION AND FUTURE
WORK
In this research, we aim to construct a driving safety
support system based on networked high-speed vision
cameras. We constructed a system employing two
high-speed environmental cameras attached to work-
stations, which were connected via a network and
synchronized to sub-millisecond order, and a com-
munication station. We also conducted comparative
experiments of collision avoidance. One experiment
using standard cameras (30 fps) failed to avoid a col-
lision with an obstacle. In contrast, the other experi-
ment using high-speed cameras (600 fps) succeeded
in avoiding a collision with the obstacle. Through
fundamental experiments, we demonstrated the effec-
tiveness of the proposed system when applied to a
driving safety support system and showed that such
a system can overcome the low responsiveness that is
common in standard environmental vision systems.
To further reinforce the effectiveness of the pro-
posed system, we are planning to carry out additional
experiments to compare it with an onboard vision sys-
tem for collision avoidance. We also aim to introduce
the proposed system in other situations. For instance,
it should be possible to apply it to intersections in ur-
ban areas. Although vehicles generally drive at lower
speeds in urban areas, the speed relative to vehicles
driving in the opposite direction is twice as fast as
that of the vehicle in question. We expect that our
proposed system will be effective even in such situa-
tions where the driving speed is not high.
ACKNOWLEDGEMENTS
This work was supported in part by the Strategic In-
formation and Communications R&D Promotion Pro-
gramme (SCOPE) 121803013.
REFERENCES
Cherng, S., Fang, C. Y., Chen, C. P., and Chen, S. W.
(2009). Critical motion detection of nearby moving
vehicles in a vision-based driver-assistance system. In
IEEE Transactions on Intelligent Transportation Sys-
tems, volume 10, pages 70–82.
Ishii, I. and Ishikawa, M. (1999). Self windowing for high-
speed vision. In IEEE International Conference on
Robotics and Automation, pages 1916–1921.
Keller, C. G., Dang, T., Fritz, H., Joos, A., Rabe, C., and
Gavrila, D. M. (2011). Active pedestrian safety by au-
tomatic braking and evasive steering. In IEEE Trans-
actions on Intelligent Transportation Systems, pages
1292–1304.
Kim, J. and Kim, J. (2009). Intersection collision avoid-
ance using wireless sensor network. In IEEE In-
ternational Conference on Vehicular Electronics and
Safety, pages 68–73.
Noda, A., Hirano, M., Yamakawa, Y., and Ishikawa, M.
(2014). A networked high-speed vision system for
vehicle tracking. In Sensors Applications Symposium,
pages 343–348.
Noda, A., Yamakawa, Y., and Ishikawa, M. (2013). High-
speed object tracking across multiple networked cam-
eras. In IEEE/SICE International Symposium on Sys-
tem Integration, pages 913–918.
Papadimitratos, P. and Evenssen, K. (2009). Vehicular com-
munication systems: Enabling technologies, applica-
tions, and future outlook on intelligent transportation.
In IEEE Communication Magazine, volume 47, pages
84–95.
Vceraraghavan, H., Masoud, O., and Papanikolopoulos, N.
(2002). Vision-based monitoring of intersections. In
IEEE International Conference on Intelligent Trans-
portation Systems, pages 7–12.
ZMP (2014). 1/10 scale robocar 1/10. http://www.zmp.
co.jp/wp/products/robocar-110?lang=en.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
544
