
2D Hair Strands Generation Based on Template Matching
Chao Sun, Fatemeh Cheraghchi and Won-Sook Lee
School of Electrical Engineering and Computer Science, University of Ottawa, 75 Laurier Avenue East, Ottawa, Canada
Keywords: Hair Strands Generation, Orientation Map, Template Matching, Spline Representation.
Abstract: Hair modelling is an important part of many applications in computer graphics. Since 2D hair strands
represent the information of the hair shape and the feature of the hairstyles, the generation of 2D hair strands
is an essential part for image-based hair modelling. In this paper, we present a novel algorithm to generate
2D hair strands based on a template matching method. The method first divides a real hairstyle input image
into sub-images with the predefined size. For each sub-image, an orientation map is estimated using Gabor
filter and the orientation feature is presented by the orientation histogram. Then it matches the orientation
histograms between each sub-image and template images in our database. Based on the matching results,
the sub-images are replaced by the corresponding manual stroke images to give a clear representation of 2D
hair strands. The result is refined by connecting the strands between adjacent sub-images. Finally, based on
the control points defined on the 2D hair strands, the spline representation is applied to obtain smooth hair
strands. Experimental results indicate that our algorithm is feasible.
1 INTRODUCTION
Hair modelling is an important part in many
computer graphic applications. For example, it can
help to create a convincing virtual character in
computer games by providing certain identity and
personality based on different hairstyles. Another
example is in cosmetic industry, 3D hair models
with different hairstyles can be applied to avatars of
the customers in order to help the customers to
design suitable hairstyles.
There are three major steps of hair modelling:
styling, animating and rendering (Magnenat-
Thalman et al. 2000). Hairstyling is the process of
modelling the shape and geometry of the hair. It
provides the density, distribution and orientation of
hair strands. Hair animating includes the dynamic
motions of hair, such as collision detection between
hair strands as well as between hair and other objects
(e.g. head and body). Hair rendering focuses on the
visual presentation of hair on screen. However, the
characteristic of hair, such as omnipresent occlusion,
specula appearance and complex discontinuities,
make it very difficult to model (Ward et al. 2007).
Recent hair modelling research works focus on
estimating and reconstructing 3D hair strands from
multi-view 2D hair images (Paris et al. 2008 ) (Luo
et al. 2012, 2013a, 2013b) . However, those systems
usually need complex configuration of digital
cameras and lighting sources. Furthermore, user
assistance is needed to a certain extent, thus the
procedure would become time-consuming. In our
proposed system, we use one digital single-lens
reflex (DSLR) camera and one Kinect sensor to
obtain both hair images and hair depth information
from different view angles of a real hair. Our system
extracts 2D hair strands from hair images. 2D hair
strands are curves that represent the orientation and
distribution of hairstyle. Based on the 2D hair
strands, we can obtain the corresponding 3D hair
strands by projecting the 2D strands on 3D point
clouds. For this paper, we only focus on extracting
2D hair strands from hair images which is the
fundamental procedure in our system.
In our system, 2D hair strands geometry can be
estimated and a collection of hair strands can be
obtained. The hair strands reflect the shape of the
hair as well as the changes of the main orientations
of the hairstyle. Compare to previous hair modelling
systems, our system does not need the complex
capture configuration as well as the user assistance.
Furthermore, we notice that the most significant
information of hair image is the orientation of hair
strands. However, instead of using the orientation
information of every pixel directly, we believe that
the orientation of certain local area is more
261
Sun C., Cheraghchi F. and Lee W..
2D Hair Strands Generation Based on Template Matching.
DOI: 10.5220/0005107102610266
In Proceedings of the 4th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2014),
pages 261-266
ISBN: 978-989-758-038-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
representative. Thus we divide the input hair image
into sub-images with predefined size and use the
orientation histograms to represent the orientation
feature of each sub-image. In addition, based on the
orientation histogram, we apply a template matching
method to obtain 2D hair strands information from
our manual stroke image database directly. Finally,
we use splines to represent those manual strokes in
order to obtain smooth hair strands.
2 RELATED WORKS
Existing hair capture systems use various methods to
acquire the orientation field and geometry of the hair.
(Paris et al. 2004) used a hair image capture system
with a fixed camera and a light source moving along
a predefined trajectory. They estimated the hair
orientation of the highlight on the hair images and
used the hair orientation to constrain the growth of
hair strands. (Wei et al. 2005) introduced a
technique that used a coarse visual hull which was
reconstructed using multi-view images. They used
the visual hull as the bounding geometry for hair
growing constrained with orientation consistency.
(Paris et al. 2008) presented an active acquisition
system called Hair Photobooth. The system was
composed by several video cameras, light sources
and projectors. It can capture accurate data of the
exterior hair strands appearance. The hair model was
generated from the scalp to the captured exterior hair
layer under constrains of the orientation field. (Jakob
et al. 2009) proposed a system to capture individual
hair strands by using focal sweeps with a robotic-
controlled macro-lens equipped camera. (Herreraet
al.2012) performed hair capture using thermal
imaging device. (Beeler at al. 2012) used a high
resolution dense camera array to reconstruct facial
hair strand geometry by matching distinctive strands.
However, since there was a strong contract between
the skin colour and the facial hair colour, this
method may not suitable for general hair geometry
estimation. (Chai et al. 2012) proposed a method to
generate an approximate hair strand model from
single hair image with modest user interaction. (Chai
et al. 2013) extended their system to create hair
animations based on video input. The system can
handle animations of relative simple hairstyle. (Luo
et al. 2013a) developed several hair modelling
methods based on multi-views. One of them was a
wide-baseline hair capture method using strand-
based refinement. In the system 8 cameras were used
to capture the complete hair, geometry. (Luo et al.
2013b) also proposed a structure-aware hair capture
method which can achieve highly convoluted hair
modelling.
3 OVERVIEW
Given a real hairstyle input image, our goal is to
obtain the hair strands which can reflect important
feature of the hairstyle: the shape and orientation of
the hair. 2D hair strands extraction is an essential
step for the 3D hair modelling. The procedure of our
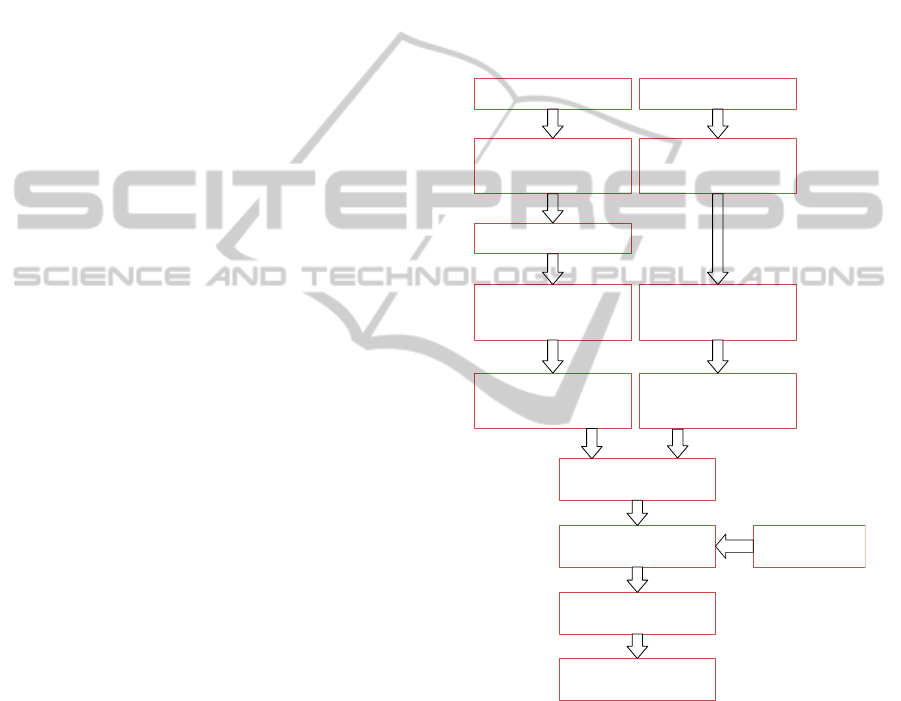
method is shown in Figure 1.
InputRGBhairimage
ConvertintoHSVco lorspace
andkeeptheSchan nel info
Dividedintosub‐images
Orientationestimation
basedonGaborfilter
Histogramoforientationmap
RGBtemplateimages
ConvertintoHSVco lorspace
andkeeptheSchan nel info
Orientationestimation
basedonGaborfilter
Histogramoforientationmap
Templatematching
Replacesub‐images
withmanualstrokeimages
Manualstrokeimages
Hairstrandsconnection
Splinerepresentationof
Hairstrands
Figure 1: The procedure of our method.
We first convert the hair image from RGB to
HSV color space and we choose the information
from the S channel as our input for the following
steps. Then we divide the input hair image into sub-
images with predefined size and we calculate the
orientation map of each sub-image using Gabor filter.
The orientation feature of each sub-image is
presented by the orientation histogram. Furthermore,
we match the orientation histograms between each
sub-image and the template images in our database.
Based on the matching results, we replace the sub-
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
262

images with the corresponding manual stroke
images to give a clear representation of 2D hair
strands. The result is refined by connecting the
strands between sub-images. Finally, based on the
control points defined on the hair strands, the spline
presentation is applied to obtain smooth hair strands.
In the rest of paper, we will describe our image
templates database in section 4. In section 5, we will
present our 2D hair strands generation algorithm in
detail with experimental results and analysis.
Conclusion and future work are given in section 6.
4 HAIR TEMPLATES DATABASE
Our hair templates database contains both the RGB
hair image templates and corresponding manual
stroke image templates.
There are 202 RGB hair image templates with
the size of 50x50 and those templates cover the
orientations from 0 degree to 180 degree. There are
202 manual stroke image templates with the same
size of 50x50. In addition, we use splines to give a
refined representation of the strokes in each manual
stroke image. We use four points to define each
spline: one start point, two control points and one
end point.
As shown in Figure 2, the first row presents the
samples of the RGB hair image templates. The
second row shows the corresponding manual stroke
image templates. Those manual stroke image
templates are created from the RGB hair image
templates manually. The third row is the spline
representation of the corresponding manual stroke
images.
Figure 2: RGB hair image templates, manual stroke image
templates and spline representation of the manual stroke
templates.
5 HAIR STRANDS GENERATION
5.1 Pre-Processing
The input image of our system is captured by digital
cameras. Real hair images have a variety of colours,
however the information we want to obtain from the
hair image is the geometry of hair strands. Thus we
first convert the RGB input image into HSV color
space and use the S channel information, as shown
in Figure 3. The S channel image is then divided into
sub-images with the size of 50x50.
Figure 3: Input RGB hair image and S channel
information image.
5.2 2D Orientation Estimation
Previous research works (Paris et al. 2004) show that
oriented filters are well suited to estimating the local
orientation of hair strands. They employ different
filters at multiple scales and determine the best score
based on the variance of the filters. In our
experiments, we filter the input image with a bank of
oriented filters. An oriented filter kernel
is a
kernel that is designed to produce a high response
for structures that are oriented along the direction
when it is convolved with an image. In our method,
we use the real part of a Gabor filter (Jain et al.
1991).
,
exp
cos
(1)
where and
. The parameters of the Gabor kernel in our
experiments are
1.8,
2.4 and 4.
The S channel image is convolved with the filter
kernel
for different (we use 10 different
orientations from 0 degree to 180 degree, each one is
18 degree). Let
,,
∗ be the
response of
at pixel, , the orientation that
produces the high score response is stored in the
orientation map
,
. A template image
and its orientation map are shown in Figure 4.
2DHairStrandsGenerationBasedonTemplateMatching
263

Figure 4: A template image and its orientation map 50x50.
5.3 Template Matching
The template matching method in our system is
based on the orientation information that we
obtained from 2D orientation estimation. As shown
in Figure 5, we can see that the templates from the
image database with similar orientation share similar
orientation histograms. Meanwhile, different
orientation can be easily distinguished using
orientation histogram.
Figure 5: Template images and their orientation map’s
histogram.
We estimate the similarity between the orientation
histograms of the input sub-image and the
orientation histograms of the template images. The
similarity between two orientation histograms is
calculated using the following formula:
(2)
where
is orientation histogram of the
template images and 1,2,…,20,
is
the orientation histogram of the input sub-image.
After obtain the matching results, we replace the
sub-images with the manual stroke images
corresponding to the template images. Manual stroke
image can directly shows the 2D hair strands
geometry. The experimental results are shown in
Figure 6. Figure 6(a) is the input RGB hair image In
order to obtain only the hair area, we first perform
image binarization to get the hair area mask as
shown in Figure 6 (b). Figure 6 (c) is the 2D hair
strands extraction result. The 2D hair strands
extraction in the hair area is shown in Figure 6 (d).
Figure 7 shows the experimental result of relative
curly hairs. Figure 7 (a) is the input hair image and
(b) is the hair strands extraction results.
Figure 6: 2D hair strands extraction using manual stroke
image templates on real wig.
Figure 7: 2D hair strands extraction using manual stroke
image templates on curly hair image.
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
264

5.4 2D Hair Strand Connection and
Spline Representation
For each manual stroke image block in Figure 6,
there are several edge points (start points and end
points on the spline). We calculate the Euclidean
distance between the each edge point of current
block and edge points of adjacent 8-neigbor blocks.
We choose the pair of points that has the minimum
distance. In addition, we compare this minimum
distance with a predefined threshold. Base on the
size of the manual stroke template images and the
distribution features of the manual strokes, we set
the threshold to be 5 in our system. If the minimum
distance is smaller than the threshold, we define
those two points should be connected and those two
manual strokes belong to one hair strand. Otherwise,
those two manual strokes do not belong to the same
hair strand. Furthermore, we apply the line tracking
algorithm to obtain relative long hair. The procedure
of the hair strands tracking algorithm is:
Start from point x as the current pixel;
Consider its eight neighbours (in a 3x3
window);
Check which of its neighbour pixel is of value
zero (black). Define this pixel as “N1”;
Change the current pixel to be “N1”;
Repeat the same procedure for “N1” and the
following pixel until reach the border of the
hair or there is no further connection
available.
By applying the hair strands tracking algorithm,
we can obtain the length information of each hair
strands as well as all the coordinates of the hair
strands’ points. Knowing the length of each hair
strand can help us to remove relative short hair
strands. In addition, we can use the coordinates of
the hair strands’ points to generate more smooth hair
stands based on spline presentation. The 2D hair
strands connection result and refined results are
shown in Figure 8. The image in the first row is the
2D hair strands connection results based on spline
representation. The second image shows the details
of our 2D hair strands connection results. The last
image shows the refinement of the connection result
based on our hair strands tracking algorithm and
spline representation. The yellow 2D hair strands are
smoother than the previous ones.
Figure 8: 2D hair strands connection and refined result.
6 CONCLUSION AND FUTURE
WORK
We present a 2D hair strands generation method
based on template matching. The introduced method
does not need a complex system configuration or
any user assistant. We focus on the orientation
information of hairstyle. Instead of using the
orientation information of every pixel directly, we
use the orientation histogram of local area to
represent the geometry of the hair strands. We
simplify the hair strands extraction procedure by
apply template matching based on the orientation
histograms. We also apply spline presentation to
obtain smooth the hair strands. The experimental
results show that our method is feasible.
In the future, we need to improve our template
matching algorithm in order to obtain more accurate
hair strands geometry. We also need to improve our
hair strands connection and spline representation
methods to generate more smooth 2D hair strands.
Based on the refined 2D hair strands, we can
combine the depth information from the Kinect in
our system to obtain 3D model of real hairstyle.
REFERENCES
Magnenat-Thalmann, N., Hadap, S., 2000. State of the art
in hair simulation. Proceedings of International
Workshop Human Modelling and Animation. 3-9.
Ward, K., Bertails, F., Kim, T., Y., Marschner, S., R.,
2007. A survey on hair modelling: styling, simulation,
and rendering. IEEE Trans. on Visualization and
Computer Graphics. 13:2, 213-234.
Paris, S., Chang, W., Kozhushnyan, O., I., Jarosz, W.,
2008. Hair photobooth: geometric and photometric
2DHairStrandsGenerationBasedonTemplateMatching
265

acquisition of real hairstyles. ACM Trans.Graph. 27:3,
30:1-30:9.
Luo, L., Li, H., Paris, S., Weise, T., Pauly, M.,
Rusinkiewicz, S. 2012. Multi-view hair capture using
orientation fields. In CVPR. 1490-1497.
Luo, L., Li, H., Rusinkiewicz, S. 2013. Structure-aware
hair capture. ACM Trans. Graph. 32, 4, 76:1-76:12.
Luo, L., Zhang, C., Zhang, Z., Rusinkiewicz, S. 2013.
Wide-baseline hair capture using strand-based
refinement. In CVPR. 265-272.
Paris, S., Briceno, H., M., Sillion, F., X., 2004. Capture of
hair geometry from multiple images. ACM Trans.
Graph. 23, 3, 712-719.
Wei, Y., Ofek, E., Quan, L., Shum, H. Y. 2005. Modelling
hair from multiple views. ACM Trans. Graph. 24, 3,
816-820.
Jakob, W., Moon, J. T. Marschner, S. 2009. Capturing hair
assemblies fiber by fiber. ACM Trans. Graph. 21, 3,
620-629.
Lay Herreara, T., Zinke, A., Weber, A. 2012. Lighting hair
from the inside: a thermal approach to hair
reconstruction. ACM Trans. Graph. 31, 6, 146:1 –
146:9.
Beeler, T., Bickel, B., Noris, G., Marschner, S., Beardsley,
P., Sumner, R., W., Gross, M. 2012. Coupled 3D
reconstruction of sparse facial hair and skin. ACM
Trans. Graph. 31, 117:1-117:10.
Chai, M., Wang, L., Weng, Y., Yu, Y., Guo, B., Zhou, K.
2012. Single-view hair modelling for portrait
manipulation. ACM Trans. Graph. 31, 4, 116:1- 116:8.
Chai, M., Wang, L., Weng, Y., Jin, X., Zhou, K. 2013.
Dynamic hair manipulation in image and videos. ACM
Trans. Graph. 31, 2, 75:1-75:8.
Jain, A., K., Farrohnia, F. 1991. Unsupervised texture
segmentation using Gabor filters. Pattern Recognition
24, 12, 1167-1186.
SIMULTECH2014-4thInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
266
