
Reactive Reaching and Grasping on a Humanoid
Towards Closing the Action-Perception Loop on the iCub
J
¨
urgen Leitner, Mikhail Frank, Alexander F
¨
orster and J
¨
urgen Schmidhuber
Dalle Molle Institute for Artificial Intelligence (IDSIA) and Scuola universitaria professionale della Svizzera italiana
(SUPSI) and Universit
`
a della Svizzera italiana (USI), Lugano, Switzerland
Keywords:
Humanoid Robot, Robot Control, Object Manipulation, Reactive Control, Collision Avoidance, Robot
perception, Eye-hand Coordination, Computer Vision.
Abstract:
We propose a system incorporating a tight integration between computer vision and robot control modules on
a complex, high-DOF humanoid robot. Its functionality is showcased by having our iCub humanoid robot
pick-up objects from a table in front of it. An important feature is that the system can avoid obstacles – other
objects detected in the visual stream – while reaching for the intended target object. Our integration also
allows for non-static environments, i.e. the reaching is adapted on-the-fly from the visual feedback received,
e.g. when an obstacle is moved into the trajectory. Furthermore we show that this system can be used both in
autonomous and tele-operation scenarios.
1 INTRODUCTION
After centuries of imagining automated machines that
would help humans, the last few decades brought an
ever growing number of these programmable appli-
ances into existence. While there are nowadays thou-
sands of robotic arms fulfilling automation tasks in
factories, robots are not yet in wide-spread use outside
industrial applications. More and more focus is put
on enabling other ares of utilisation, e.g. the use of
robots in household or healthcare settings. For robotic
systems to perform tasks in such environments, which
are not specifically designed for robots, a better un-
derstanding – i.e. perception – of the situation and a
closer coordination between action and perception –
i.e. adapting to changes occurring in the scene – are
required (Ambrose et al., 2012; Kragic and Vincze,
2009; Kemp et al., 2007).
The goal of this work is to extend the capabili-
ties of our robot to allow for more autonomous and
more adaptive – some would say, more ‘intelligent’ –
behaviours. Our platform is a state-of-the-art, high
degree-of-freedom (DOF) humanoid (see Figure 1)
and we focus on object manipulation in non-static en-
vironments. To facilitate this a close integration of
computer vision and control modules was developed
and implemented. Drawing inspiration from a wide
variety of techniques, our system incorporates, e.g.,
machine learning approaches to implement vision.
The paper revisits some of the previous ap-
proaches in the fields of robot vision and control, as
well as previous work on building integrated robotic
systems using perception and action subsystems in
Section 2. We then describe our approach to build-
ing a tightly coupled framework for visually-guided
reaching and grasping in detail (Section 3), before we
present our high DOF, state-of-the-art robot platform
(Section 4). Section 5 explains the experiments and
our findings, while conclusions (Section 6) and plans
for future research are found at the end.
2 BACKGROUND
Although there exists a rich body of literature in
computer vision, path planning, and feedback con-
trol, wherein many critical subproblems are addressed
Figure 1: Our research platform, the iCub humanoid robot.
102
Leitner J., Frank M., Förster A. and Schmidhuber J..
Reactive Reaching and Grasping on a Humanoid - Towards Closing the Action-Perception Loop on the iCub.
DOI: 10.5220/0005113401020109
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 102-109
ISBN: 978-989-758-039-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

individually, most demonstrable behaviours for hu-
manoid robots do not effectively integrate elements
from all three disciplines. Consequently, tasks that
seem trivial to us humans, such as picking up a spe-
cific object in a cluttered environment, remain beyond
the state-of-the-art in experimental robotics.
Sensory feedback is of critical importance to de-
cide and act in unstructured environments. Robots re-
quire the ability to perceive their surroundings, as it
is generally not feasible or possible to provide all the
information needed a priori (the most striking exam-
ple being robotic space exploration, where only little
about the environment the robot is sent to is known
before each mission).
2.1 Perception and Robot Vision
Creating a functional perception system is a hard, but
important, problem. It is a prerequisite for robots to
act in a purposeful, ‘intelligent’ way.
A wide range of sensors have been used to build
models of the environment. Visual feedback tends
to be the most interesting and active research area,
as cameras tend to be cheap and in widespread use
nowadays. It has extensively been used in mobile
robot applications, for obstacle avoidance, mapping
and localisation (Davison and Murray, 2002; Karls-
son et al., 2005). Furthermore there exists a natu-
ral tendency to be inspired by human perception, in
which vision plays a primary role, and behaviour, es-
pecially when working with humanoid robots. The
field of Computer Vision spawned a multitude of re-
search sub-domains, such as, scene reconstruction,
event detection, object recognition, motion estima-
tion, etc. An important problem in robot vision is
that of determining whether the image data contains
some specific object, feature, or activity. The inter-
ested reader is referred to a nice survey of the vari-
ous approaches (Cipolla et al., 2010). This has been
researched for quite some time but the task seems
harder than expected. No solution for the general
case, i.e. detecting arbitrary objects in arbitrary sit-
uations, exists (Kemp et al., 2007). Problems arise
because of real-life environmental impacts, such as,
changing light conditions, incomplete or inconsistent
data acquisition (Kragic and Vincze, 2009) (see also
Figure 2). Most object detection applications are us-
ing SIFT (Lowe, 1999) or SURF (Bay et al., 2006)
with extensions for higher robustness (St
¨
uckler et al.,
2013). For real time object tracking in videos frames
contour trackers are often used (Panin et al., 2006).
Experimental robotics though still relies heavily on
artificial landmarks and fiducial markers to simplify
(and speed-up) the detection problem.
Once an object is successfully detected in the cam-
era images, it is important to localise it, so it can
be placed into a model of the environment. ‘Spa-
tial Perception’, as this is known, develops in humans
over time from observation and interaction with the
world. Research in brain- and neuro-science show
clear trends on what changes during this development,
but how these changes happen is not clear (Plumert
and Spencer, 2007).
To obtain a distance measure stereo vision systems
use two images taken from different angles (Hartley
and Zisserman, 2000). In humanoid robot scenarios
a method for localisation is required, which is able to
cope with motion in the robot’s head, gaze and upper
body. While projective geometry approaches work
well under carefully controlled experimental circum-
stances, they are not easily transferred to robotics ap-
plications though (as seen by the out-of-the-box lo-
calisation capabilities of the iCub (Pattacini, 2011)).
It was previously shown that, even on complex hu-
manoid robots, this stereo localisation can be learned
(Leitner et al., 2012c).
2.2 Motion and Actions
Only after the robot knows which objects are in the
environment and where they are located can it start to
interact with them. The Path Planning Problem is an
important problem in robot motion research. It de-
notes the issue to find motions that pursue a set goal,
e.g. reaching, while deliberately avoiding obstacles
and other constraints. Solving this problem is critical
to deploying complex robots in unstructured environ-
ments. An overview of interesting approaches to mo-
tion planning can be found in the textbook “Planning
Algorithms” (LaValle, 2006). To solve the path plan-
ning problem is generally expensive, therefore robots
controlled this way are typically very deliberate and
Figure 2: Detection of complex objects, e.g. a tea box, in
changing poses, different light and when partially occluded
is a hard problem in robot vision.
ReactiveReachingandGraspingonaHumanoid-TowardsClosingtheAction-PerceptionLoopontheiCub
103

slow. This is often perceived during robotics demos
(e.g. at recent DARPA Robotics Challenge Trials),
where one can see them ‘think’ first, often for quite
a bit, before a motion is executed.
A more reactive approach, instead of the ‘think
first, act later’ paradigm, emerged in the 1980s. A
variety of approaches have been applied to quickly
generate control commands, without searching the
robot’s configuration space (Khatib, 1986; Brooks,
1991; Schoner and Dose, 1992). All these use local
information from the workspace, and transform it into
motor commands according to some heuristics. It is
therefore not surprising that these approaches excel at
fast, reactive obstacle avoidance while they have trou-
ble with global planning tasks. Because of this such
approaches have become popular in the context of
safety and human-robot interaction (De Santis et al.,
2007; Dietrich et al., 2011).
Once a motion is found to reach for a certain ob-
ject the actual manipulation is not a trivial thing, even
for humans. For example, research shows that even a
prototypical precision grasp task is not matured until
the age of 8-10 years (Forssberg et al., 1991)). Recent
results though highlight the progress and advanced
state of research in robot grasping (Carbone, 2013).
2.3 Integration
To allow for a variety of objects to be picked up from
various positions the robot needs to see, act and re-
act within an integrated control system. For example,
methods enabling a 5 DOF robotic arm to pick up ob-
jects using a point-cloud generated model of the world
and objects are available to calculate reach and grasp
behaviours (Saxena et al., 2008). In 2010 a technique
for robots to pick up non-rigid objects, such as, tow-
els was presented (Maitin-Shepard et al., 2010). It
allows to reliably and robustly pick up a towel from a
table by going through a sequence of vision-based re-
grasps and manipulations-partially in the air, partially
on the table.
Even when sufficient manipulation skills are avail-
able these need to be constantly adapted by an
perception-action loop to yield desired results. A
must read for roboticists is ‘Robotics, Vision and
Control’ (Corke, 2011)’. It puts the close integra-
tion of these three components into the spotlight and
describes common pitfalls and issues when trying to
build such systems with high levels of sensorimotor
integration. In the DARPA ARM project, which aims
to create highly autonomous manipulators capable of
serving multiple purposes across a wide variety of ap-
plications, the winning team showed an end-to-end
system that allows the robot to grasp and pick-up di-
verse objects (e.g. a power drill, keys, screwdrivers,
etc.) from a table by combining touch and LASER
sensing (Hudson et al., 2012).
Visual Servoing (Chaumette and Hutchinson,
2006) is a commonly used approach to closed-loop vi-
sion based control of robotic systems – i.e. some level
of hand-eye coordination. It has been shown to work
as a functional strategy to control robots without any
prior hand-eye calibration (Vahrenkamp et al., 2008).
3 CLOSING THE
ACTION-PERCEPTION LOOP
Our aim is to generate a pick-and-place operation
for the iCub. For this, functional motion and vision
subsystems are integrated to create a closed action-
perception loop. The vision-side detects and localises
the object continuously, while the motor-side tries to
reach for target objects avoiding obstacles at the same
time. A grasping of the object is triggered when the
hand is near the target.
3.1 Action Side: MoBeE
Modular Behavioral Environment (MoBeE) (Frank
et al., 2012) is a software infrastructure to realise
complex, autonomous, adaptive and foremost safe
robot behaviours. It acts as an intermediary between
three loosely coupled types of modules: the Sen-
sor, the Agent and the Controller. These correspond
to abstract solutions to problems in Computer Vi-
sion, Motion Planning, and Feedback Control, respec-
tively. An overview of the system is depicted in Fig-
ure 3. The framework is robot independent, and can
exploit any device that controlled via YARP (Metta
et al., 2006). It also supports multiple interacting
robots, and behavioural components are portable and
reusable thanks to their weak coupling. MoBeE con-
trols the robot constantly, according to the following
second order dynamical system:
M ¨q(t) +C ˙q(t) + K(q(t) − q
∗
) =
∑
f
i
(t) (1)
where q(t) ∈ R
n
is the vector function representing
the robot’s configuration, M, C, K are matrices con-
taining mass, damping and spring constants respec-
tively. q
∗
denotes an attractor (resting pose) in con-
figuration space. Constraints on the system are im-
plemented by forcing the system via f
i
(t), providing
automatic avoidance of kinematic infeasibilites aris-
ing from joint limits, cable lengths, and collisions.
An agent can interact with MoBeE, instead of di-
rectly with the robot, by sending arbitrary high-level
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
104
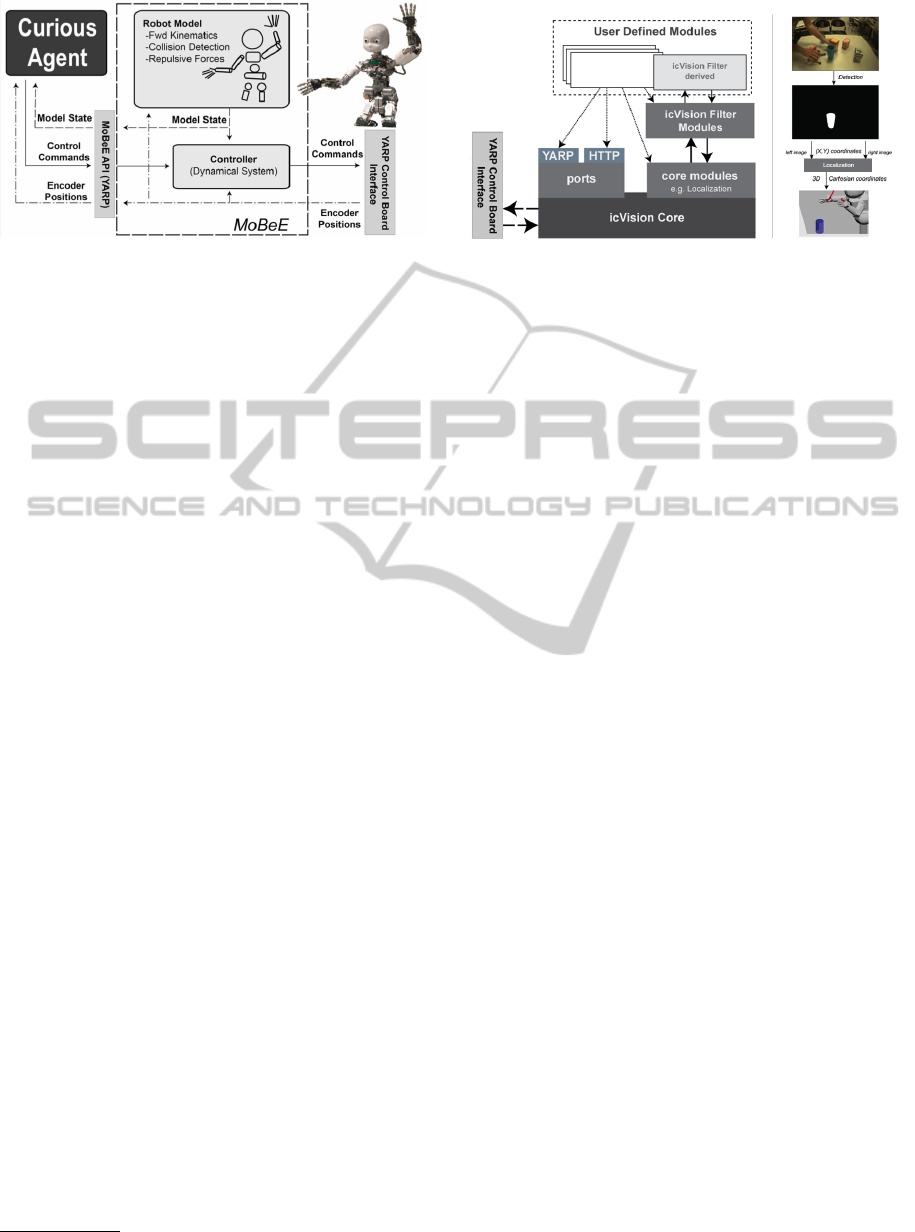
Figure 3: The Modular Behavioral Environment Architec-
ture: MoBeE implements low-level control and enforces
necessary constraints to keep the robot safe and operational
in real-time. Agents (left) are able to send high-level com-
mands, while a kinematic model (top) is driven by the
stream of encoder positions (right). The model computes
fictitious constraint forces, which repel the robot from col-
lisions, joint limits, and other infeasibilities. These forces,
f
i
(t), are passed to the controller (middle), which computes
the attractor dynamics that governs the actual movement of
the robot.
control commands. For example, when a new at-
tractor q
∗
is set to a desired pose by an agent, e.g.
by calculating the inverse kinematics of an opera-
tional space point, q(t) begins to move toward q
∗
.
The action then terminates either when the dynamical
system settles or when a timeout occurs, depending
on the constraint forces f
i
(t) encountered during the
transient response.
3.2 Perception Side: icVision & CGP-IP
icVision (Leitner et al., 2012b) is an open-source
1
framework consisting of distributed YARP modules
performing computer vision related tasks in support
of cognitive robotics research (Figure 4). It includes
the modules for the detection and identification of ob-
jects (in the camera images, referred to as Filters), as
well as the localisation of the objects in the robot’s
operational space (3D Cartesian space). At the centre
is the icVision core module, which handles the con-
nection with the hardware and provides housekeeping
functionality (e.g., extra information about the mod-
ules started and methods to stop them). Currently
available modules include object detection, 3D lo-
calisation, gazing control (attention mechanism) and
saliency maps. Standardised interfaces allow for easy
swapping and reuse of modules.
The main part in object detection, the binary seg-
mentation of the object from the background (see Fig-
ure 4 on the right), in the visual space, is performed in
separate icVision filter modules. Each one is trained
1
Code available at: https://github.com/Juxi/icVision/
Figure 4: The icVision Architecture: The core module (bot-
tom) is mainly for housekeeping and accessing & distribut-
ing the robot’s camera images and motor positions. Object
detection is performed in the filter modules (top), by seg-
menting the object of interest from the background. A typ-
ical work flow is shown (right): input images are retrieved
from the cameras, the specific object is detected by a trained
Filter Module, before the outputs (together with the robot’s
current pose) are used to estimate a 3D position using a lo-
calisation module. The object is then placed in the world
model.
using our Cartesian Genetic Programming (CGP) im-
plementation called CGP-IP, in combination with the
OpenCV (Bradski, 2000) library, to detect one spe-
cific object in a variety of real-life situations (see Fig-
ure 2) – hence also identifying it. The framework can
run multiple filter modules in parallel. A variety of
filters have been learnt and most of them are able to
perform the object detection in near real-time.
To interact with the objects the robot also needs to
know where the object is located. Developing an ap-
proach to perform robust localisation to be deployed
on a real humanoid robot is necessary to provide the
necessary inputs for on-line motion planning, reach-
ing, and object manipulation. icVision provides mod-
ules to estimate the 3D position based on the robot’s
pose and the location of object in the camera images.
3.3 Integration
The sensory and motor sides establish quite a few
capabilities by themselves, yet to grasp objects suc-
cessfully while avoiding obstacles they need to work
closely together. The continuous tracking of obstacles
and the target object is required to create a reactive
reaching behaviour which adapts in real-time to the
changes of the environment.
We created interfaces between MoBeE and icVi-
sion allowing for a continuous visual based locali-
sation of the detected objects to be propagated into
the world model. This basic eye-hand coordination
allows for an adaptation while executing the reach-
ing behaviour to changing circumstances, improving
our robot’s autonomy. Figure 5 gives an overview of
ReactiveReachingandGraspingonaHumanoid-TowardsClosingtheAction-PerceptionLoopontheiCub
105

the research in our lab. Various modules (grey boxes)
were developed and integrated into a functional sys-
tem. The perception side consists mainly of object de-
tection and localisation (top area, depicted in green).
The bottom area (yellow) shows the action/motion
side, while the blue area on the right represents the
memory modules, including a world model. The var-
ious modules are:
• Object Models, Detection and Identification: as
mentioned above, the detection and identification
of objects is a hard problem. To perform these
tasks CGP-IP (Cartesian Genetic Programming
for Image Processing) (Harding et al., 2013) is
used. It provides a machine learning approach to
building visual object models, which can be con-
verted into executable code, in both supervised
and unsupervised fashion (Leitner et al., 2012a).
The resulting program performs the segmentation
of the camera images for a specific object.
• Object Localisation: by using the image coordi-
nates of the detected object from the two cameras
together with the current robot’s pose, the position
of the object can be estimated in Cartesian space
wrt. the robot’s reference frame. Instead of a cal-
ibration for each single camera, the stereo system
and the kinematic chain, we incorporate a module
that learns to predict these from a training set. Our
system has been shown to estimate these positions
with a technique based on genetic programming
(Leitner et al., 2012d) and an artificial neural net-
work estimators (Leitner et al., 2012c). After the
object is detected in the camera images the loca-
tion of an object is estimated and the world model
is updated.
• Action Repertoire: herein we only use a light-
weight, easy-to-use, one-shot grasping system
(LEOGrasper
2
), which has been used extensively
at IDSIA (Figure 6). It can be configured to per-
2
Source code available at: https://github.com/Juxi/iCub/
Figure 5: Overview of the modules and the on-going re-
search towards a functional eye-hand coordination system
on the iCub. The modules are shown by subsystem: per-
ception (green), action (yellow) and memory (blue).
form a variety of grasps, all requiring to close the
fingers in a coordinated fashion. The iCub incor-
porates touch sensors on the fingertips, due to the
high noise, we use the error reported by the PID
controllers of the finger motors to know when they
are in contact with the object.
• World Model, Collision Avoidance and Motion
Generation: the world model keeps track of the
robot’s pose in space and the objects it has visu-
ally detected. Figure 7 shows this model includ-
ing the robot’s pose the static table, and the two
objects localised from vision. MoBeE is used to
safeguard the robot from (self-)collisions. It fur-
thermore allows to generate motion by forcing the
hand in operational space.
4 THE ROBOT
Our experimental platform is an open-hardware,
open-software humanoid robotic system developed
within various EU projects, called iCub (Tsagarakis
et al., 2007) (shown in Figure 1). It consists of two
arms and a head attached to a torso roughly the size
of a human child. The head and arms follow an an-
thropomorphic design and provide a high DOF sys-
tem that was designed to investigate human-like ob-
ject manipulation. It provides also a tool to investigate
human cognitive and sensorimotor development. To
allow for safe and ‘intelligent’ behaviours the robot’s
movements need to be coordinated closely with feed-
back from visual, tactile, and acoustic
3
sensors. The
iCub is an excellent experimental platform for cogni-
tive, developmental robotics and embodied artificial
intelligence (Metta et al., 2010). Due to its com-
plexity it is also a useful platform to test the scala-
bility and efficiency of various machine learning ap-
proaches when used together with real-life robotic
systems.
3
Acoustic feedback might be used when manipulation
objects to know if a grasp was successful.
Figure 6: Grasping a variety of objects successfully, such
as, tin cans, plastic cups and tea boxes. The module works
for both the right and left hand.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
106

5 EXPERIMENTS & RESULTS
The inverse kinematics problem, i.e. placing the hand
at a given coordinate in operational space, can be
performed with previously available software on the
iCub, such as, the existing operational space con-
troller (Pattacini, 2011) or a roadmap-based approach
(Stollenga et al., 2013). These systems though re-
quire a very accurate calibration the mechanical sys-
tem, however some mechanical non linearities still
cannot be taken into account. In addition they are not
yet coupled to visual localisation, meaning there is no
easy way to adapt the reach during execution.
The first experiment shows that with the herein
presented system we are able to reactively move the
arm out of harms way when the environment changes.
We then show how we can use this system to reac-
tively reach and grasp these objects when we change
their type from ‘obstacle’ to ‘target’, therefore chang-
ing the fictional forces calculated.
5.1 Avoiding a Moving Obstacle
Static objects in the environment can be added di-
rectly into MoBeE’s world model. Once, e.g. the
table, is in the model, actions and behaviours are
adapted due to computed constraint forces. These
forces, f
i
(t) in (1), which repel the robot from col-
lisions with the table, governs the actual movement
of the robot. This way we are able to send arbitrary
motions to our system, while ensuring the safety of
our robot (this has recently been shown to provide a
good reinforcement signal for learning robot reaching
behaviours (Pathak et al., 2013; Frank et al., 2014)).
The presented system has the same functionality also
for arbitrary, non-static objects. After detection in
both cameras the object’s location is estimated (icVi-
sion) and propagated to MoBeE. The fictional forces
Figure 7: Showing the visual output of the MoBeE world
model during one of our experiments. Parts in red indi-
cate (an impeding) collision with the environment (or it-
self). The inset shows the actual scene. (See video: https://
www.youtube.com/watch?v=w qDH5tSe7g).
Figure 8: The reactive control of the left arm, permit-
ting the iCub to stay clear of the non-static ‘obstacle’, as
well as the table. (See video: https://www.youtube.com/
watch?v=w qDH5tSe7g).
are calculated to avoid impeding collisions. Figure 7
shows how the localised object is in the way of the
arm and the hand. To ensure the safety of the rather
fragile fingers, a sphere around the end-effector can
be seen. It is red, indicating a possible collision, be-
cause the sphere intersects with the object. The same
is valid for the lower arm. The forces, calculated at
each body part using Jacobians, push the intersecting
geometries away from each other, leading to a forc-
ing of the hand (and arm) away from the obstacle.
Figure 8 shows how the the robot’s arm is avoiding
a non-stationary obstacle. The arm is ‘pushed’ aside
at the beginning, when the cup is moved close to the
arm. It does so until the arm reaches its limit, then the
forces cumulate and the end-effector is ‘forced’ up-
wards to continue avoiding the obstacle. Without an
obstacle the arm starts to settle back into its resting
pose q
∗
.
5.2 Reaching and Grasping Objects
This next experiment is on a simple reactive pick-and-
place routine for the iCub. Similarly to the above ex-
periment we are using MoBeE to adapt the reaching
behaviour while the object is moved. To do this we
change the type of the object within the world model
from ‘obstacle’ into ‘target’. Due to this change there
is no repelling force calculated between the object and
the robot parts. In fact we can now use the vector
from the end-effector to the target object as a force
that drives the hand towards a good grasping position.
MoBeE also allows to trigger certain responses
when collisions occur. In the case, when we want
the robot to pick-up the object, we can active a grasp
subsystem whenever the hand is in the close vicin-
ity of the object. We are using a prototypical power
grasp style hand-closing action, which has been used
successfully in various demos and videos.
4
Figure 6
shows the iCub successfully picking up (by adding an
extra upwards force) various objects using our grasp-
ing subsystem, executing the same action.
4
See videos at: http://robotics.idsia.ch/media/
ReactiveReachingandGraspingonaHumanoid-TowardsClosingtheAction-PerceptionLoopontheiCub
107

Our robot frameworks are able to track multiple
objects at the same time, which is also visible in Fig-
ure 7, where it tracks both the cup and the tea box. By
simply changing the type of the object within MoBeE
the robot reaches for a certain object while avoiding
the other.
6 CONCLUSIONS
Herein we present our on-going research towards vi-
sual guided object manipulation with the iCub. A
tightly integrated sensorimotor system, based on two
frameworks developed over the past years, enables the
robot to perform a simple pick-and-place task. The
robot reaches to detected objects, placed at random
positions on a table.
Our implementation enables the robot to adapt to
changes in the environment. Through this it safe-
guards the iCub from unwanted interactions – i.e. col-
lisions. We do this by integrating the visual system
with the motor side by using an attractor dynamic
based on the robot’s pose and a model of the world.
This way we achieve a level of eye-hand coordination
not previously seen on the iCub.
In the future we would like to integrate some ma-
chine learning to further improve the object manipula-
tion skills of our robotic system. Improving the pred-
ication and selection of actions will lead to a more
adaptive, versatile robot. Furthermore it might be
of interest to investigate an even tighter sensorimo-
tor coupling, e.g. avoiding translation into operational
space by working in vision/configuration space.
ACKNOWLEDGEMENTS
The authors would like to thank the European Com-
mission for supporting this research under grant no.
FP7-IST-IP-231722, ‘Intrinsically Motivated Cumu-
lative Learning Versatile Robots’ (IM-CLeVeR).
REFERENCES
Ambrose, R., Wilcox, B., Reed, B., Matthies, L., Lavery,
D., and Korsmeyer, D. (2012). Robotics, tele-robotics,
and autonomous systems roadmap. Technical report,
NASA.
Bay, H., Tuytelaars, T., and Van Gool, L. (2006). Surf:
Speeded up robust features. Computer Vision – ECCV
2006, pages 404–417.
Bradski, G. (2000). The OpenCV Library. Dr. Dobb’s Jour-
nal of Software Tools.
Brooks, R. (1991). Intelligence without representation. Ar-
tificial intelligence, 47(1):139–159.
Carbone, G. (2013). Grasping in robotics, volume 10 of
Mechanisms and Machine Science. Springer.
Chaumette, F. and Hutchinson, S. (2006). Visual servo con-
trol, part i: Basic approaches. IEEE Robotics & Au-
tomation Magazine, 13(4):82–90.
Cipolla, R., Battiato, S., and Farinella, G. M. (2010). Com-
puter Vision: Detection, Recognition and Reconstruc-
tion, volume 285. Springer.
Corke, P. (2011). Robotics, Vision and Control, volume 73
of Springer Tracts in Advanced Robotics. Springer.
Davison, A. J. and Murray, D. W. (2002). Simultaneous lo-
calization and map-building using active vision. IEEE
Trans. on Pattern Analysis and Machine Intelligence,
24(7):865–880.
De Santis, A., Albu-Schaffer, A., Ott, C., Siciliano, B., and
Hirzinger, G. (2007). The skeleton algorithm for self-
collision avoidance of a humanoid manipulator. In
Proc. of the IEEE/ASME International Conferenced
on Advanced Intelligent Mechatronics.
Dietrich, A., Wimbock, T., Taubig, H., Albu-Schaffer, A.,
and Hirzinger, G. (2011). Extensions to reactive self-
collision avoidance for torque and position controlled
humanoids. In Proc. of the IEEE International Con-
ference on Robotics and Automation (ICRA).
Forssberg, H., Eliasson, A., Kinoshita, H., Johansson, R.,
and Westling, G. (1991). Development of human pre-
cision grip i: basic coordination of force. Experimen-
tal Brain Research, 85(2):451.
Frank, M., Leitner, J., Stollenga, M., Frster, A., and
Schmidhuber, J. (2014). Curiosity driven reinforce-
ment learning for motion planning on humanoids.
Frontiers in Neurorobotics, 7(25).
Frank, M., Leitner, J., Stollenga, M., Harding, S., F
¨
orster,
A., and Schmidhuber, J. (2012). The modular be-
havioral environment for humanoids and other robots
(MoBeE). In Proc. of the Int’l. Conf. on Informatics
in Control, Automation & Robotics (ICINCO).
Harding, S., Leitner, J., and Schmidhuber, J. (2013). Carte-
sian genetic programming for image processing. In
Riolo, R., Vladislavleva, E., Ritchie, M. D., and
Moore, J. H., editors, Genetic Programming Theory
and Practice X, Genetic and Evolutionary Computa-
tion, pages 31–44. Springer New York.
Hartley, R. and Zisserman, A. (2000). Multiple view geom-
etry in computer vision. Cambridge Univ Press.
Hudson, N., Howard, T., Ma, J., Jain, A., Bajracharya, M.,
Myint, S., Kuo, C., Matthies, L., Backes, P., Hebert,
P., Fuchs, T., and Burdick, J. (2012). End-to-end dex-
terous manipulation with deliberate interactive esti-
mation. In Proc. of the IEEE International Confer-
ence on Robotics and Automation (ICRA).
Karlsson, N., Di Bernardo, E., Ostrowski, J., Goncalves,
L., Pirjanian, P., and Munich, M. (2005). The vS-
LAM Algorithm for Robust Localization and Map-
ping. In Proc. of the IEEE International Conference
on Robotics and Automation (ICRA).
Kemp, C., Edsinger, A., and Torres-Jara, E. (2007). Chal-
lenges for robot manipulation in human environments
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
108

[grand challenges of robotics]. IEEE Robotics & Au-
tomation Magazine, 14(1).
Khatib, O. (1986). Real-time obstacle avoidance for manip-
ulators and mobile robots. The international journal
of robotics research, 5(1):90.
Kragic, D. and Vincze, M. (2009). Vision for robotics.
Foundations and Trends in Robotics, 1(1):1–78.
LaValle, S. (2006). Planning algorithms. Cambridge Univ
Pr.
Leitner, J., Chandrashekhariah, P., Harding, S., Frank, M.,
Spina, G., Forster, A., Triesch, J., and Schmidhuber, J.
(2012a). Autonomous learning of robust visual object
detection and identification on a humanoid. In Proc.
of the IEEE International Conference on Development
and Learning and Epigenetic Robotics (ICDL).
Leitner, J., Harding, S., Frank, M., F
¨
orster, A., and Schmid-
huber, J. (2012b). icVision: A Modular Vision System
for Cognitive Robotics Research. In Proc. of the Inter-
national Conference on Cognitive Systems (CogSys).
Leitner, J., Harding, S., Frank, M., F
¨
orster, A., and Schmid-
huber, J. (2012c). Learning spatial object localisation
from vision on a humanoid robot. International Jour-
nal of Advanced Robotic Systems, 9.
Leitner, J., Harding, S., Frank, M., F
¨
orster, A., and Schmid-
huber, J. (2012d). Transferring spatial perception be-
tween robots operating in a shared workspace. In
Proc. of the IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS).
Lowe, D. (1999). Object Recognition from Local Scale-
Invariant Features. In Proc. of the International Con-
ference on Computer Vision.
Maitin-Shepard, J., Cusumano-Towner, M., Lei, J., and
Abbeel, P. (2010). Cloth grasp point detection based
on multiple-view geometric cues with application to
robotic towel folding. In Proc. of the IEEE In-
ternational Conference on Robotics and Automation
(ICRA).
Metta, G., Fitzpatrick, P., and Natale, L. (2006). YARP:
Yet Another Robot Platform. International Journal of
Advanced Robotic Systems, 3(1).
Metta, G., Natale, L., Nori, F., Sandini, G., Vernon, D.,
Fadiga, L., von Hofsten, C., Rosander, K., Lopes, M.,
Santos-Victor, J., Bernardino, A., and Montesano, L.
(2010). The iCub humanoid robot: An open-systems
platform for research in cognitive development. Neu-
ral Networks, 23(8-9):1125–1134.
Panin, G., Ladikos, A., and Knoll, A. (2006). An efficient
and robust real-time contour tracking system. In Proc.
of the IEEE International Conference on Computer
Vision Systems.
Pathak, S., Pulina, L., Metta, G., and Tacchella, A. (2013).
Ensuring safety of policies learned by reinforcement:
Reaching objects in the presence of obstacles with the
icub. In Proc. of the IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS).
Pattacini, U. (2011). Modular Cartesian Controllers for
Humanoid Robots: Design and Implementation on the
iCub. PhD thesis, Italian Institute of Technology, Gen-
ova.
Plumert, J. and Spencer, J. (2007). The emerging spatial
mind. Oxford University Press, USA.
Saxena, A., Driemeyer, J., and Ng, A. (2008). Robotic
grasping of novel objects using vision. The In-
ternational Journal of Robotics Research (IJRR),
27(2):157.
Schoner, G. and Dose, M. (1992). A dynamical systems
approach to task-level system integration used to plan
and control autonomous vehicle motion. Robotics and
Autonomous Systems, 10(4):253–267.
Stollenga, M., Pape, L., Frank, M., Leitner, J., F
˜
orster, A.,
and Schmidhuber, J. (2013). Task-relevant roadmaps:
A framework for humanoid motion planning. In Proc.
of the IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS).
St
¨
uckler, J., Badami, I., Droeschel, D., Gr
¨
ave, K., Holz,
D., McElhone, M., Nieuwenhuisen, M., Schreiber,
M., Schwarz, M., and Behnke, S. (2013). Nim-
bro@home: Winning team of the robocup@home
competition 2012. In Robot Soccer World Cup XVI,
pages 94–105. Springer.
Tsagarakis, N., Metta, G., Sandini, G., Vernon, D., Beira,
R., Becchi, F., Righetti, L., Santos-Victor, J., Ijspeert,
A., Carrozza, M., and Caldwell, D. (2007). iCub: the
design and realization of an open humanoid platform
for cognitive and neuroscience research. Advanced
Robotics, 21:1151–1175.
Vahrenkamp, N., Wieland, S., Azad, P., Gonzalez, D., As-
four, T., and Dillmann, R. (2008). Visual servoing for
humanoid grasping and manipulation tasks. In Proc.
of the IEEE International Conference on Humanoid
Robots, pages 406–412.
ReactiveReachingandGraspingonaHumanoid-TowardsClosingtheAction-PerceptionLoopontheiCub
109
