
Shape Memory Alloy-based High Phase Order Motor
Claudio Rossi
1
, Zongjian Yuan
2
, Chao Zhang
1
, Antonio Barrientos
1
and William Coral
3
1
Centre for Automation and Robotics CAR UPM-CSCI, Madrid, Spain
2
Northwestern Polytechnical University, Xi’an Shaanxi, China
3
Universidad Polit
´
ecnica de Madrid, Madrid, Spain
Keywords:
Shape Memory Alloys, Stepper Motor, Artificial Muscles, Smart Materials, High Phase Order Motor.
Abstract:
In this paper, we present our current work in the design and characterisation of a new shape memory alloy
(SMA)-based High Phase Order Motor (HPOM). The motor can be used either in stepping mode or in servo
mode of operation. Each phase of the motor consists of an SMA wire with a spring. The principle of operation
of the HPOM is presented. In its operation the motor resembles a stepper motor though the actuation principles
are different and hence has been characterised similar to a stepper motor.This motor can be actuated in either
direction depending on which SMA is actuated, which are presented in this work. The motor is modelled and
simulated and the results of simulations and experiments are presented.
1 INTRODUCTION
The Shape memory effect refers to the ability of cer-
tain materials to ”remember” a determined shape at
a specified temperature (Coral et al., 2012). Due to
their unique behaviour, they are also called intelligent
or smart material. Generally, NiTi (Nickel-Titanium)
SMAs are the most common alloys used. NiTi SMAs
work based on the shape memory effect, which es-
sentially takes place by the influence of temperature.
Heating this material by joule effect we obtain a con-
traction in the material, i.e. applying an electric cur-
rent we can heat this material and thus produce move-
ment. By definition, the electric resistivity is linked
to the length of material, this means that the internal
electrical resistance of the SMA changes when it con-
tracts. Basically this allows us to use the SMA as an
actuator and sensor simultaneously. In fact, most of
the applications involving position linear control of
SMAs, feedback electrical resistance measurements
to estimate the motion generated by the actuator. This
avoids the inclusion of external position sensors for
closing the control loop.
Due to its characteristics compared to conven-
tional technologies such as hydraulic/pneumatic ac-
tuators or electric motors/servomotors the SMAs of-
fer improvements in the size, weight, strength, etc.
for this reason in Robotics some applications have
been developed using SMA (Rossi et al., 2010),(Rossi
et al., 2011a) (Rossi et al., 2013), and (Colorado et al.,
2012). The actuators based on SMAs can be broadly
classified into Limited Motion Type and Unlimited
Motion Type. Under limited motion type both lin-
ear and rotary type actuators are presented in litera-
ture. Under unlimited motion type actuators only one
type of motor was presented (Reynaerts and Brussel,
1998). This motor used springs made of SMA wires
for actuation. Using SMA wire is possible to de-
sign actuator in tension mode (wire actuator), torsion
mode (spring actuator) and bending mode (strip ac-
tuator), as presented by (Otsuka and Wayman, 1998)
and (Reynaerts and Brussel, 1998). In terms of En-
ergy Density the SMA actuator designed using SMA
strips has 46 J/kg (Reynaerts and Brussel, 1998) while
compared to SMA actuator designed using SMA wire
has an energy density of 466 J/Kg. It is evident that
the SMA used in tension mode has 100 times more
energy density compared to SMA used in bending
mode. Therefore, in this paper, we present our work
to build a High Phase Order Motor, which uses SMA
wires in tension mode. For the same volume of SMA
material used the motor generates more torque com-
pared to the motor designed with spring or strip type
SMA actuator. it was noted (Kuribayashi, 1989) that
SMA spring or strip generates force as a non-linear
function of its deformed length. The actuation used in
the present work generates a constant effective force
throughout its operating range. The motor presented,
works in stepping mode (Kuo and Tal, 1979), (Kuo,
1979) generating incremental motion and servo mode
562
Rossi C., Yuan Z., Zhang C., Barrientos A. and Coral W..
Shape Memory Alloy-based High Phase Order Motor.
DOI: 10.5220/0005114805620568
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 562-568
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
generating continuous motion. The SMA wire based
motor presented has better dynamic response com-
pared to the motors that use SMA strips or springs.
Analyzing the energy efficiency in the SMA actua-
tor, it can never have a greater efficiency compared to
a Carnot cycle between heating and cooling tempera-
tures. Therefore, an SMA actuator will never compete
directly with classical electric actuators. But the SMA
has very high power to weight ratio and power to vol-
ume ratio compared to the conventional electric actu-
ators and hydraulic actuators (Reynaerts and Brussel,
1998). There are several applications where the en-
ergy efficiency is not significant but a large power has
to be generated with a compact size and light weight
actuator. Therefore, SMA has found wide usage in
Space, Robotics and Medical application due to its
compact size, light weight, extremely cheap, capable
of working at low voltages, easily available commer-
cially
1
non magnetic property, large force-weight ra-
tio, large life cycles, negligible volume, sensing ca-
pability, noise-free operation, smooth and insensitiv-
ity to space radiations, namely, electrons, protons and
heavy ions. The experience gained during the last
years at the Bioinspired Systems Lab
2
of CAR UPM-
CSIC with previously designed robots has demon-
strated that by (i) finding suitable niches of applica-
tion, (ii) dedicated mechatronics design, and (iii) ad-
hoc control strategies, SMAs can effectively be used
as an alternative actuation technology in a wide spec-
trum of applications and robotic systems.
2 MECHANICAL DESIGN
Following the same principle of a conventional elec-
tric motor, the proposed actuator is composed of two
parts, stator and rotor. Here, the stator and the rotor
are called, respectively, break and plate. Both parts
of the actuator have been prototyped in ABS and pro-
duced with a 3D Printer. Three groups of SMA work
on the actuator. We name them as group A, B, C (see
Figures 2 and 4). All SMAs adopted have a diameter
of 150µm , a pull force of 321 grams-force, a power
consumption of 410mA at room temperature, and a
nominal contraction time of 1 second. Note that con-
traction time can be improved by overloading (Rossi
et al., 2010). The diameter size of the SMA wires has
been chosen as a trade-off between current consump-
tion, pull force and contraction time.
1
NiTi (Nickel-Titanium), such as NiTinol
R
are the
most commonly commercially available SMAs.
2
http://www.disam.upm.es/˜ crossi/Bio Inspired Robots/
Bio Home.html.
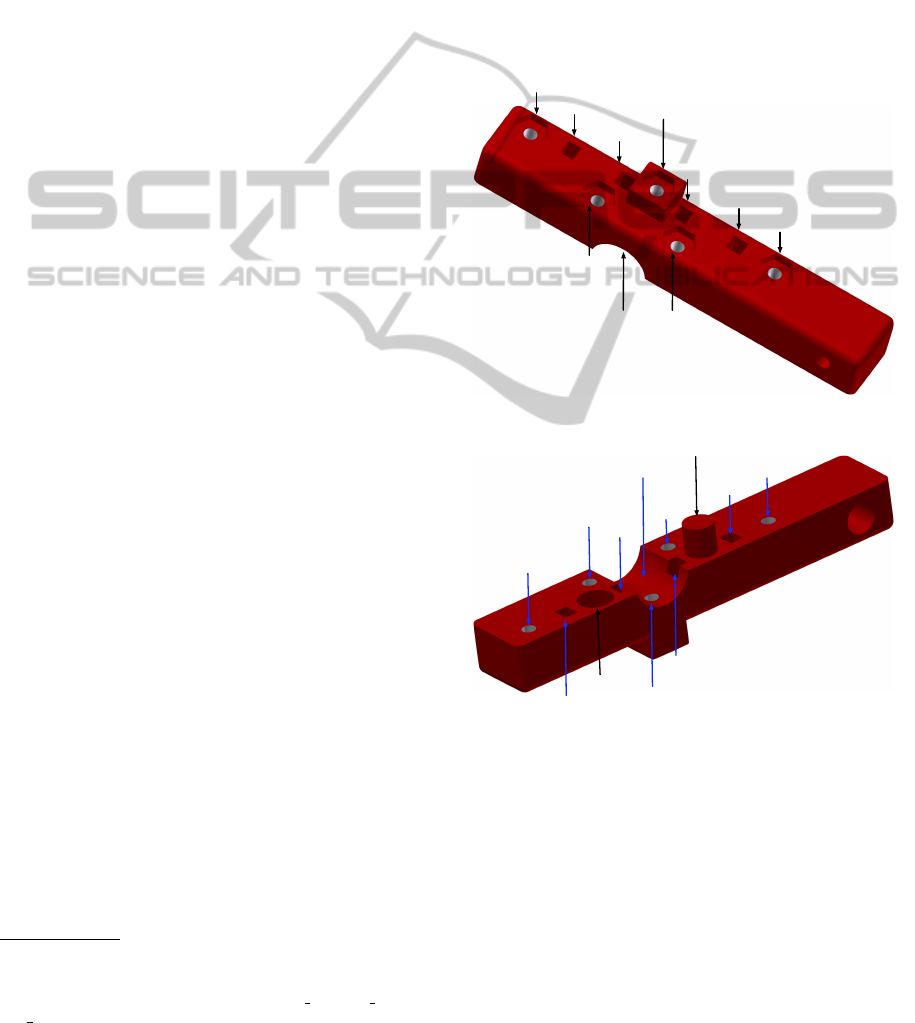
2.1 Brake
Is composed by two identical arms, each facing each
other. The figure 1 shows the Top and Bottom view
in one of this arms. This part moves the shaft in both
directions (clockwise and counterclockwise) or block
and prevent undesirable movements. Both functions
by grasping the shaft between the Shaft Hole. This
functions are achieved by controlling the contraction
of the SMAs located within the two brake arms as
show in the figure 2.
Left
Brake
Bolt
Right
Brake
Bolt
Center
Brake
Bolt
Left
Hole
1
Left
Hole
2
Right
Hole
2
Right
Hole
1
Left
Rotor
Bolt
Right
Rotor
Bolt
Shaft
Hole
(a) Top view.
Left
Brake
Bolt
Center
Brake
Bolt
Left
Hole
2
Left
Hole
1
Left
Rotor
Bolt
Shaft
Hole
Right
Rotor
Bolt
Right
Hole
2
Right
Hole
1
Right
Brake
Bolt
Guide
Hole
Guide
Bar
(b) Bottom view.
Figure 1: Break arms.
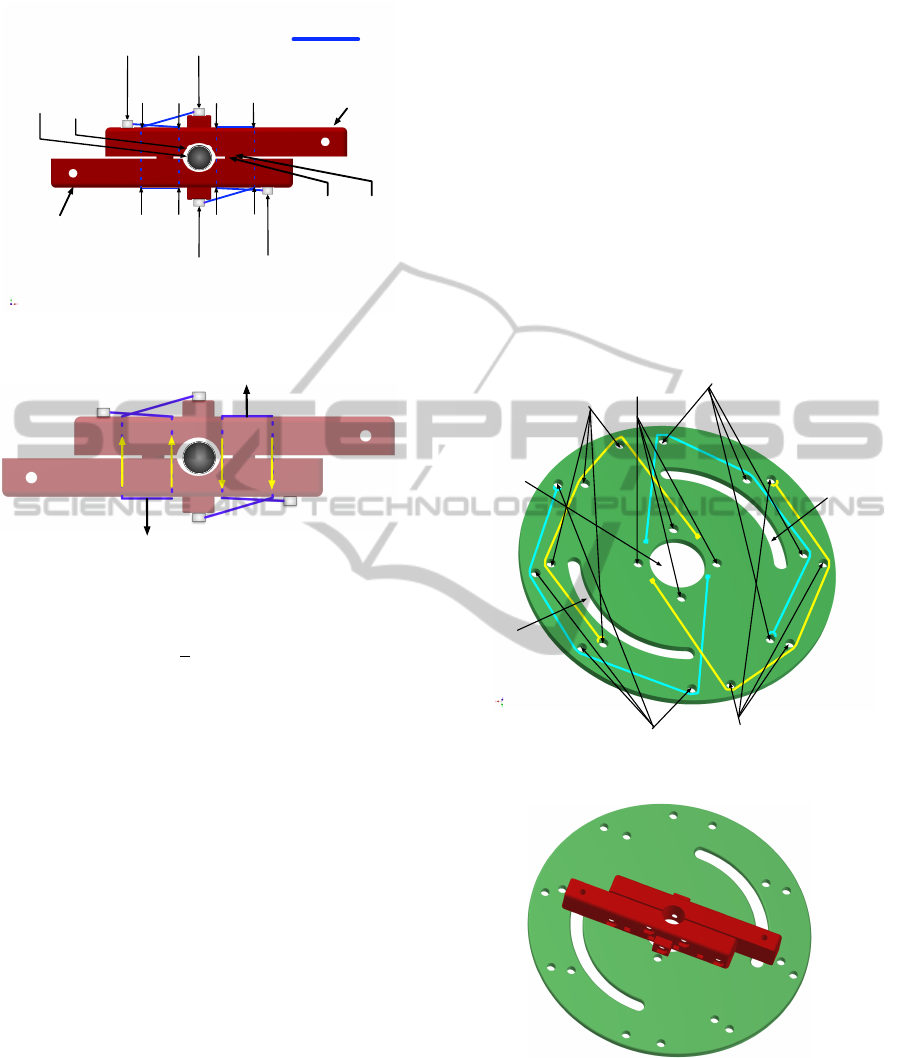
There are two pairs of SMA wires called Group
C that can be actuated by separate or at same time
to increase the amount of forces applied to the shaft.
Each of these connect the two arms in two sections
and 8 Points. In this way the force to grasp the shaft
is multiplied by four times the force of the SMA.
The force diagram is show in the figure 3 and it is
represented in the equations below.
ShapeMemoryAlloy-basedHighPhaseOrderMotor
563
SMA "Group C"
A
Left
Brake
Bolt
A1
Left
Hole
1
A2
Left
Hole
2
B
Center
Brake
Bolt
E1
Arm 1
E2
Arm 2
B1
Right
Hole
2
B2
Right
Hole
1
D2
Left
Hole
1
D1
Left
Hole
2
C1
Right
Hole
1
C2
Right
Hole
2
D
Left
Brake
Bolt
C
Center
Brake
Bolt
Shaft
Shaft
Hole
Guide
Hole
Guide
Bar
Figure 2: Arrangement of the SMA wires actuating the
break.
F
T
1
F
S
1
F
S
1
F
S
2
F
T
2
F
S
2
Figure 3: Forces acting on the brake.
F
T
1
= F
S
1
+ F
S
1
F
S
1
=
1
2
F
SMA
1
F
T
1
= F
SMA
1
(1)
F
T
2
= F
SMA
2
(2)
F
SMA
1
= F
SMA
2
F
T
= F
T
1
+ F
T
2
(3)
2.2 Plate
This is the base where the brake is housed. Is com-
posed by only one part. The most function of this
part is to houses the SMAs that allow to rotate the
brake, that will act as a rotor. The radius of the
plate is set in such a way to allow arranging a large
segment of the SMAs, which is passes through set
of guides. Such arrangement, shown in Figure 4 is
needed since the SMA wires only contracts approxi-
mately a 4% of their length, and this group of SMAs
determines the number of degrees that the brake can
rotate. The speed and the amount of rotation over the
brake is determined controlling the contraction of the
SMAs. Two pairs of SMA wires that can be actuated
individually or at same time depending of the amount
of force to be applied to the break to rotate the shaft
(when it is blocking it) and how much force is to be
applied.
The Group A allows to rotate the brake clockwise
and the Group B counterclockwise. Each phase is
composed by one ”Group A and B” the Figure 4a
show only one phase. Each time that another phase
is required (for improved speed) we only need to add
other plate more like in a sandwich. Note that at rest
position SMAs A are fully extended, while SMAs B
are loose, in such a way not to prevent SMAs A to
contract. When SMAs A are contracted, SMAs B will
be fully extended and thus ready to contract to bring
the brake back to the start position.
The force applied to the brake to rotate it for ev-
ery wire is 321 grams-force this because the friction
between the SMA and the screw is negligible.
Shaft
Hole
Fixation
Holes
Trail Guide
Arm1
Trail Guide
Arm2
Holes
Group B
Arm1
Holes
Group A
Arm1
Holes
Group B
Arm2
Holes
Group A
Arm2
(a)
(b)
Figure 4: Arrangement of the SMA wires used to rotate the
brake (a) and arrangement of the two parts (b).
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
564
3 OPERATION PRINCIPLE
3.1 Principle of One Way Shape
Memory Effect
The ability to remember a predetermined shape af-
ter several deformation is called Shape Memory Ef-
fect (SME). The Martensite phase transformation
is responsible for the shape changes with tempera-
ture variation. Commonly SMA wires are made of
metal alloys (nickel-titanium) and they are known as
NiTi. The NiTi alloy is trained to remember a short
length at high temperature by heat treatment. In cold
state (Martensite) the SMA is malleable and can be
stretched to a longer length with a small force. Nor-
mally in SMA actuators a biasing force is applied dur-
ing the cold condition to stretch the SMA wire to a
designed length faster. this process is known as pre-
loading. Pre-loading is usually done by using a spring
in series with the SMA wire or a weight (W) to gen-
erate force by gravity (figure5). When the SMA is
heated to high temperature (Austenite), SMA shrinks
to the trained length. While shrinking, the SMA be-
comes hard, and can pull much larger force than what
is required to stretch SMA at low temperature. The
proposed High Phase Order motor is designed using
one way SMA wires.
///////// /////////
W
W
/////////////
/////////////
Low
Temperature
High
Temperature
Figure 5: One way SMA actuation.
3.2 Shape Memory Alloy-Based HPOM
Operating Principle
The principle of functioning can be explained in 5
steps (always actuating the SMA Groups A, B, and
C) as shown below.
• Step 1: The ”Group C” (phase 1) is actuated and
the shaft is locked.
• Step 2: While the ”Group C” (phase 1) is actuated
, the ”Group A or B” (phase 1) (depending on the
the way of rotation, clockwise or counterclock-
wise) is actuated simultaneously. To simplify the
explanation we decided to actuate the ”Group A”
• Step 3: When the ”Group A” (phase 1) is fully
contracted we release it and the ”Group C” from
the phase 2 is actuated.
• Step 4: The ”Group C” (phase 1) is released and
the ”Group A” (phase 2) is actuated.
• Step 5: When the ”Group A” (phase 2) is fully
contracted we release it and the ”Group C” from
the phase 2 is released.
4 MODELING AND CONTROL
Both parts (brake and plate) are controlled with a PID
controller with an external force feedback loop con-
trol. Using the changes over the internal resistance of
the SMA it is possible to implement as well a posi-
tion control. Force/position control strategies provide
an effective framework to deal with tasks involving
interaction with the environment.
4.1 System Identification and
Controller
Using the force feedback loop we can linearize the
behaviour of the SMA. In this way we obtain experi-
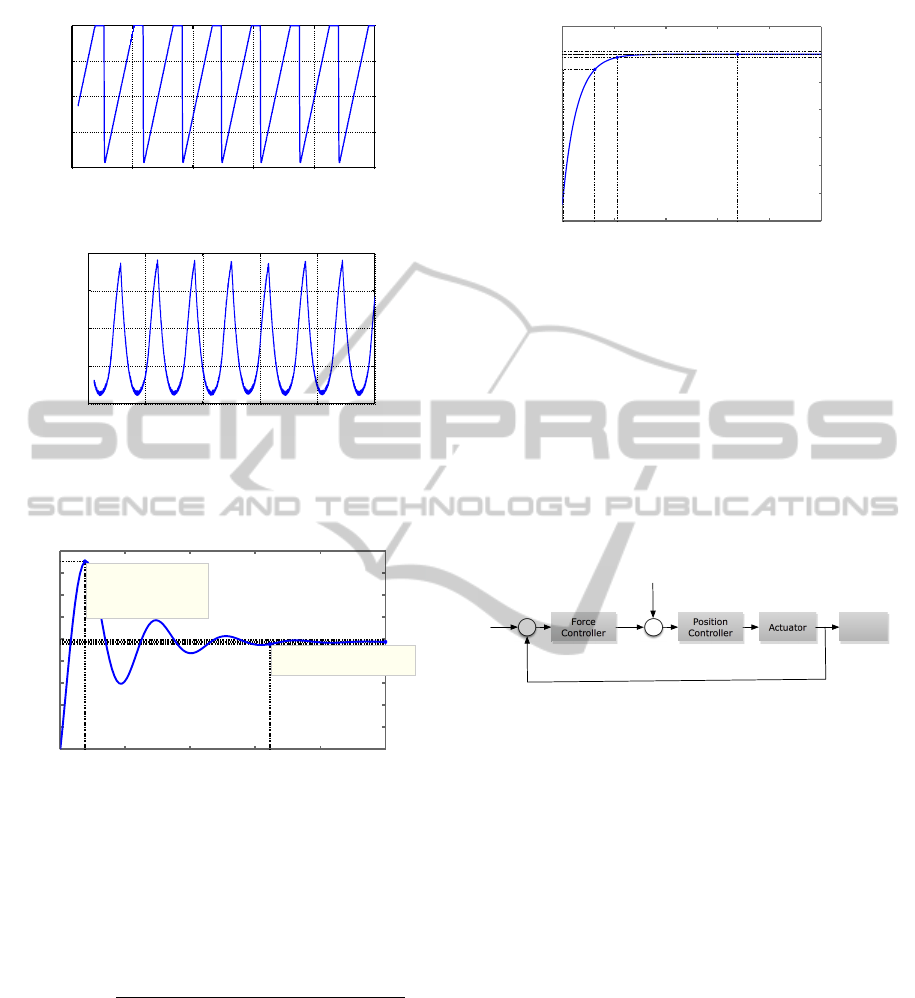
mentally the model for the brake and plate. The input
signal used to actuate the SMA and the output sig-
nal obtained by the force sensor due to this action is
show in the Figure 6. After system identification, car-
ried out using the ”ident” tool box of MATLAB
R
,
the transfer function obtained is:
G(s) =
0.002697s + 0.0001736
s
2
+ 0.02438s + 0.003559
The step response of G(s) in open loop is shown
in Figure 7.
For the control, we used a PID (proportional-
integral-derivative) controller, which responds to the
equation:
u(t) = K
p
e(t) + K
i
Z
t
0
e(t)dt + K
d
de(t)
dt
, (4)
where e(t) is the signal error and u(t) is the control
input of the process. K
p
, K
i
, K
e
are the proportional,
integrative and derivative gains. We have tuned the
values to the three parameters (K
p
, K
i
, K
d
) of the PID
controller based on the analysis of the open and close
ShapeMemoryAlloy-basedHighPhaseOrderMotor
565
0 10 20 30 40 50
0
2
4
6
8
Time
Voltage
Voltage Vs Time
(a)
0 10 20 30 40 50
100
200
300
400
500
Force Vs Time
Time
Force
(b)
Figure 6: SMAs step response in open loop (a) Input, Volt-
age (V) Vs Time (s), (b) Output, Force (gf) Vs Time (s).
Step Response
Time (seconds)
Amplitude
0 100 200 300 400 500
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
System: G
Peak amplitude: 0.0853
Overshoot (%): 74.9
At time (seconds): 37.8
System: G
Settling time (seconds): 322
Figure 7: G(s) Step response in open loop.
loop of the system to be controlled. The PID con-
troller gains obtained are:
K
p
= 50000, K
i
= 1000, K
d
= 100
and the transfer function including the PID con-
troller and the feedback is:
GLC3(s) =
2.697s
3
+ 135s
2
+ 8.95s + 0.01736
3.697s
3
+ 135s
2
+ 8.953s + 0.01736
Figure 8. shows the step response of function
GLC3(s).
4.2 Control Schema
In the control system (Fig. 9), the force error is con-
verted in a suitable reference trajectory for the inner
position controller which is defined in the Cartesian
space or the angular space (De Schutter and van Brus-
sel, 1988). When there are no constraints due to the
Step Response
Time (seconds)
Amplitude
0 0.1 0.2 0.3 0.4 0.5
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
Figure 8: Step response function GLC3(s). Peak Response
0.338s, Settling Time 0.106s, Rise Time 0.06s.
environment, the force controller will be without ef-
fect and the position controller will continue to con-
trol the system. When constraints appear, the force
controller allows the control of the generated efforts.
This configuration makes it possible to control the
force and the position simultaneously. The force con-
trol loop is designed to prevail over the position con-
trol loop the event of a conflict (Ferguene and Re-
douane, 2009). This means that the force controller
dominates the position controller
Force
Controller
Position
Controller
Actuator Output
+
+
+
-
F
d
F
e
U
X
d
X
c
∆X
Figure 9: Control schema (X
d
: Desired Position; F
d
: De-
sired Force; ∆X: Modifier resulting from the force control
loop; X
C
: Position command; U: Control Reference; F
e
:
Environment Force).
5 EXPERIMENTAL RESULTS
This section primarily describes the experimental
tests, along with a comparison of the results with the-
oretical predictions. The experimental tests were per-
formed at different excitation frequencies but same
amplitude while keeping the same input signal (sine
wave)
The experimental setup for the system identifi-
cation was made using the Control Electronic Cir-
cuit (CEC) (Rossi et al., 2010), (Rossi et al., 2011a),
(Rossi et al., 2011b). Its allows to measure voltages
and current through the SMA wires as well as to pro-
gram the PIC microcontroller embedded on the circuit
to directly control the SMA without external devices.
It is also possible to communicate with this through
the I2C Bus, SPI Bus or Serial Port. Using the voltage
and current we can estimate the value and the changes
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
566
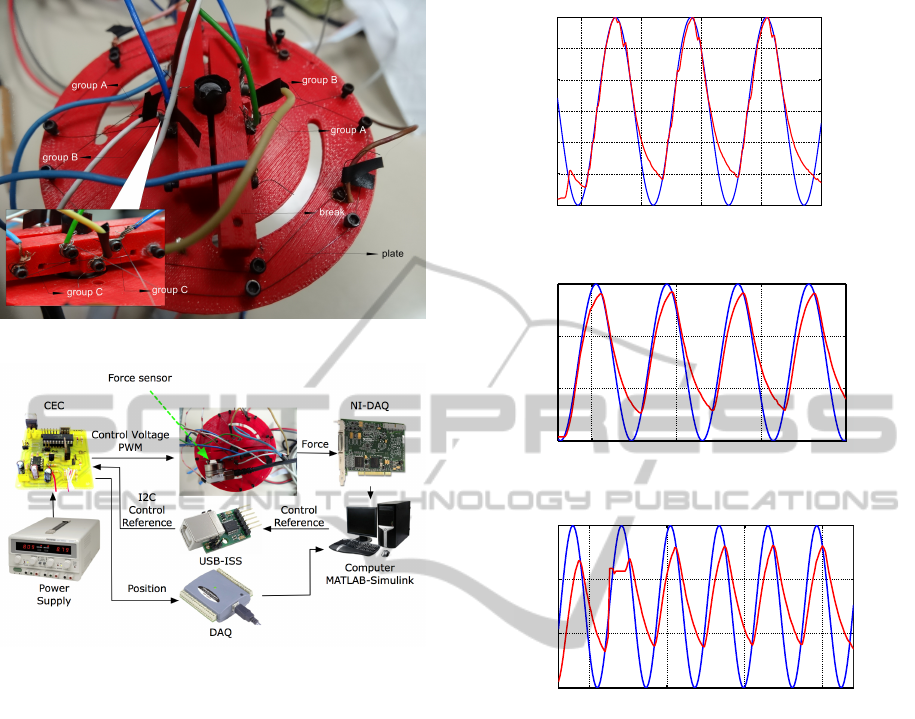
Figure 10: Experimental testbed, Plate and Brake.
Figure 11: Experimental testbed.
over the internal resistance in the SMA and is possible
in this way to know the actual percentage of shrink-
ing. The method consists in measuring the electrical
resistance of an SMA element (Teh and Featherstone,
2008), calculating a maximum safe heating current
as a function of measured resistance, and ensuring
that the actual heating current does not exceed this
maximum value. In fact resistance is being used as a
form of temperature measurement, and the maximum
safe heating current is designed to prevent overheat-
ing. The force response is measured using a Nano
17 transducer (ATI Industrial Automation, ) through
a data acquisition card (NI-DAQ) NI PCI-6220 (Na-
tion Instruments, ). It has a 0.318 gram-force of res-
olution. The figure 10 shows the testbed used. This
also shows the data acquisition device (DAQ) USB-
1208FS (Measurement Computing, ) used to mea-
sure the voltages from the CEC and the USB-ISS al-
lows communication between the Computer and CEC
through I2C Bus. The complete setup is depicted in
figure 11.
When the frequency increase the tracking error
also increases but increasing the ISMA the speed re-
sponse improves. In this way the tracking error is re-
5 10 15 20 25
0
100
200
300
400
500
600
Force Response 1Hz
Time (s)
Force (Grams−Force)
(a)
5 10 15 20
0
200
400
600
Force Response 1.5Hz
Time (s)
Force (Grams−Force)
(b)
5 10 15 20
0
200
400
600
Force Response 2Hz
Time (s)
Force (Grams−Force)
(c)
Figure 12: Experimental results: (a) Force response at 1 Hz,
(b)1.5 Hz, (c) 2 Hz.
duced. Theoretically the maximum force produced
from the SMA in the Group A was 642 grams-force
experimentally we obtained a force (frequency 1Hz)
of 600 grams-force.
6 CONCLUSIONS
In this study we built and characterised a novel actua-
tor based in Shape Memory Alloy (SMA) wires. The
actuator can be instrumented to measure input power
and output force and SMA electric resistance for a
wide variety of force inputs and actuation speeds. Be-
cause each of the force inputs are replicable, the ac-
tuator can be actuated with thousands of combina-
tions of force parameters while providing valuable
data on force and power. The broad range of capa-
bilities of this actuator make it an excellent tool to be
ShapeMemoryAlloy-basedHighPhaseOrderMotor
567
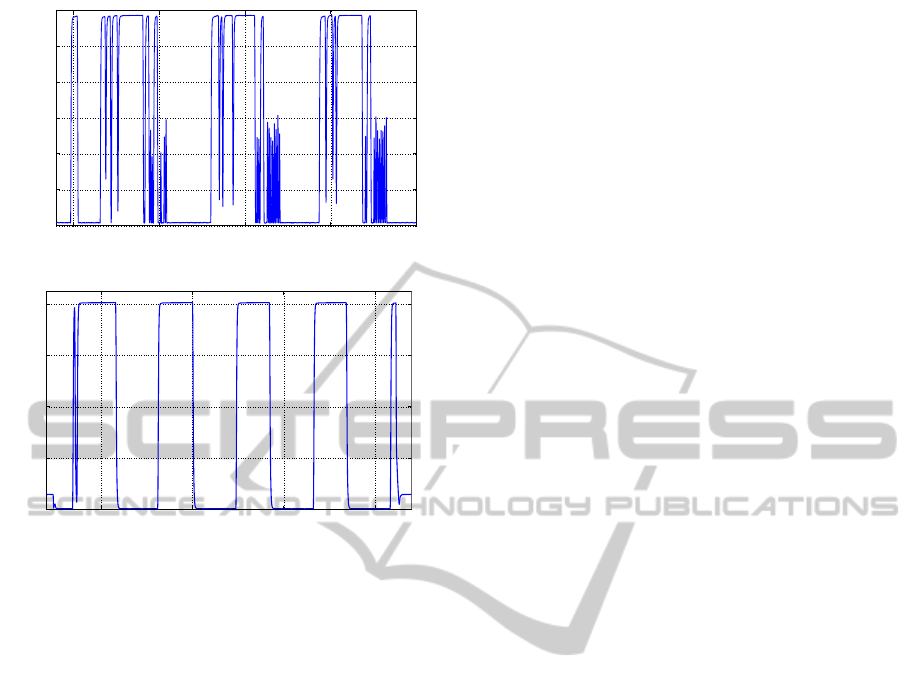
5 10 15 20 25
0
0.1
0.2
0.3
0.4
0.5
Time(s)
I
SMA
(A)
(a)
5 10 15 20
0
2
4
6
8
Time (s)
Vin (V)
(b)
Figure 13: Experimental results: (a)ISMA (A) Vs Time (s)
at 1Hz, (b)Vinput (V) Vs Time (s) at 1.5 Hz.
used like a steeper motor (because we can control the
contraction length and have resolution of steps from
less than a millimeterr) or continuous motor in ap-
plications where the weight a size are critical, and in
particular to make less complex robots reducing the
control and hardware cost.
ACKNOWLEDGEMENTS
William Coral acknowledge to the Administrative
Department of Science, Technology and Innova-
tion (COLCIENCIAS) (grant call 568 2013) and
COLFU TU RO (grant call 2012) from Colombia for
its support. The authors acknowledge the support
of the Robotics and Cybernetics Group at the Cen-
tre for Automation and Robotics UPM-CSIC, the
project ROBOCITY 2030 (Community of Madrid S-
0505/DPI/000235) and the project ROTOS (Ministry
of Science And Innovation of Spain DPI2010-17998).
REFERENCES
ATI Industrial Automation. F/T Sensor: Nano17.
http://www.ati-ia.com. Accessed June 6, 2013.
Colorado, J., Barrientos, A., and Rossi, C. (2012). Biome-
chanics of smart wings in a bat robot: morphing wings
using SMA actuators. Bioinspiration & Biomimetics.
Coral, W., Rossi, C., and Monta
˜
no, J. C. (2012). SMA-
Based Muscle-Like Actuation in Biologically Inspired
Robots: A State of the Art Review. page 30. INTECH.
De Schutter, J. and van Brussel, H. (1988). Compliant robot
motion ii. a control approach based on external control
loops. International Journal of Robotics Research.,
7(4):18–33.
Ferguene, Farid, T. and Redouane (2009). Dynamic exter-
nal force feedback loop control of a robot manipulator
using a neural compensator, application to the trajec-
tory following in an unknown environment. Interna-
tional Journal of Applied Mathematics and Computer
Science, 19(1):113–126.
Kuo, B. C. (1979). Step motors and control systems. Incre-
mental motion control. SRL Pub. Co.
Kuo, B. C. and Tal, J. (1979). Incremental Motion Con-
trol: Step motors and control systems, edited by B.
C. Kuo. Incremental Motion Control. SRL Publishing
Company.
Kuribayashi, K. (1989). A new servo motor using shape
memory alloy. In Industrial Electronics Society, 1989.
IECON ’89., 15th Annual Conference of IEEE, pages
139–144 and 238–243.
Measurement Computing. USB-1208FS.
http://www.mccdaq.com/usb-data-acquisition/USB-
1208FS.aspx. Accessed June 6, 2013.
Nation Instruments. NI PCI-6220.
http://sine.ni.com/nips/cds/view/p/lang/es/nid/14130.
Accessed June 6, 2013.
Otsuka, K. and Wayman, C. M. (1998). Mechanism of
shape memory effect and superelasticity. Shape mem-
ory materials.
Reynaerts, D. and Brussel, H. V. (1998). Design aspects
of shape memory actuators. Mechatronics, 8(6):635–
656.
Rossi, C., Colorado, J., Coral, W., and Barrientos, A.
(2011a). Bending continuous structures with SMAs: a
novel robotic fish design. Bioinspiration & Biomimet-
ics, 6(4):045005.
Rossi, C., Coral, W., and Barrientos., A. (2010). SMA Con-
trol for Bio-mimetic Fish Locomotion. In Interna-
tional Conference on Informatics in Control, Automa-
tion and Robotics (ICINCO), Madeira.
Rossi, C., Coral, W., and Barrientos, A. (2013). Robotic
Fish to Lead the School. In Palstra, A. P. and Planas,
J. V., editors, Swimming Physiology of Fish, pages
407–421. Springer Berlin Heidelberg.
Rossi, C., Coral, W., Colorado, J., and Barrientos, A.
(2011b). A motor-less and gear-less bio-mimetic
robotic fish design. In Robotics and Automation
(ICRA), 2011 IEEE International Conference on,
pages 3646–3651.
Teh, Y. H. and Featherstone, R. (2008). An architecture
for fast and accurate control of shape memory alloy
actuators. International Journal of Robotics Research,
27(5):595–611.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
568
