
Optimal Walking of an Underactuated Planar Biped
with Segmented Torso
Zhongkai Chen
1
, Nafissa Lakbakbi El Yaaqoubi
2
and Gabriel Abba
2
1
LCFC, Arts et M´etiers ParisTech, 4 rue Augustin Fresnel, 57078 Metz Cedex 3, France
2
ENIM, 1 rue Ars Laquenexy, 57078 Metz Cedex 3, France
Keywords:
Biped Robot, Optimal Walk, Segmented Torso, Zero Dynamics, Energy Efficiency.
Abstract:
Recently, underactuated bipeds with pointed feet have been studied to achieve dynamic and energy efficient
robot walking patterns. However, these studies usually simplify a robot torso as one link, which is different
from a human torsos containing 33 vertebrae. In this paper, therefore, we study the optimal walking of a 6-link
planar biped with a segmented torso derived from its 5-link counterpart while ensuring that two models are
equivalent when the additional torso joint is locked. For the walking, we suppose that each step is composed
of a single support phase and an instantaneous double support phase, and two phases are connected by a
plastic impact mapping. In addition, the controlled outputs named symmetry outputs capable of generating
exponentially stable orbits using hybrid zero dynamics, are adopted to improve physical interpretation. The
desired outputs are parameterized by B´ezier functions, with 5-link robot having 16 parameters to optimize
and 6-link robot having 19 parameters. According to our energy criterion, the segmented torso structure may
reduce energy consumption up to 8% in bipedal walking, and the maximum energy saving is achieved at high
walking speeds, while leaving the criteria at low walking speeds remain similar for both robots.
1 INTRODUCTION
One of the fundamental tasks in designing biped
robots is to find robot structures and control strategies
capable of providing energy-efficient and stable
walking motions. As indicated in Figure 1, many
researchers have tried to study the energy saving
benefits of bionic robot designs by adopting certain
human resembling parts such as curved feet (Martin
and Schmiedeler, 2012), rolling knees (Hobon et al.,
2013), locked knees (Sinnet et al., 2011), swinging
arms (Kaddar et al., 2012) or springs (Bauer et al.,
2014). Nevertheless, the theoretical advantages of a
human-like robot torso are still rarely studied among
the vast literature on humanoid robots, despite the
studies on realizing human-like biped torsos from a
practical point of view (Mizuuchi et al., 2006).
Unveiling the theoretical advantages of humanlike
robot structures requires numerical optimization. By
far, the most common method is through designing
reference trajectories with a limited number of
parameters, whether the trajectories are functions of
time or functions of robot state, and then optimizing
these parameters using a certain cost function. Many
researchers have used optimization in the analysis
Curved feet
Underactuation
Rolling knees
Knee-locking
Swinging arms
Springs and dampers
Segmented torso
Compliant torso
Figure 1: Possible methods for reducing energy
consumption.
and design of biped walking motions with trajectories
defined as functions of time (Cabodevila and Abba,
1997; Chevallereau and Aoustin, 2001; Beletskii
et al., 1982), and these early studies usually adopted
the zero moment point (ZMP) principle to ensure the
feasibility of various walking motions. However, a
periodic and feasible walking motion might not be
stable because biped robots are hybrid systems with
impacts during each step, which might serve as a
discrete positive feedback of error. Some researchers
also attempted to eliminate the impact completely
and thus creating walking motions that consume no
213
Chen Z., El Yaaqoubi N. and Abba G..
Optimal Walking of an Underactuated Planar Biped with Segmented Torso.
DOI: 10.5220/0005115702130220
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 213-220
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

mechanical energy, but these studies are only valid for
passive biped robots walking in a highly controlled
environment (Rouhollah et al., 2013). For activated
robots with motors, it’s practically impossible to
eliminate the energy consumption caused by Joule
heating.
Recently, with more and more researchers striving
to achieve more dynamic biped walking patterns, a
planar biped robot with pointed feet and the name
“RABBIT” was created, which witnessed the birth of
the concept called “virtual constraints” (Chevallereau
et al., 2003). By using a monotonic scalar quantity
representing the progression of a step, Westervelt
and Grizzle (2002) proposed a method to define
trajectory functions with a closed-form stability
indicator. Armed with this method, Ames (2012)
proposed human outputsto relate the walking motions
of biped robots to the human walking data collected
in a laboratory.
The work presented here is inspired by both
the previously studied human-like parts and the
optimization methods with provable stability. Our
intention is to analyze the energy-saving potentials of
the segmented torso. The optimal walking of a 5-link
robot and a 6-link robot with underactuated pointed
feet is studied to quantify the difference between
these two robot configurations. The segmented torso
of the 6-link robot is assumed to be straight at the
beginning and the end of each step. Based on the
stability analysis proposed by Westervelt and Grizzle
(2002), we define symmetry outputs to observe the
mirror-like behavior of a virtual stance leg and a
virtual swing leg. This interpretation of bipedal
walking motions is related to a previous research
on asymptotic stable walking with simplified posture
control and swing leg advancement strategies (Grizzle
et al., 2001). By running optimization with symmetry
outputs at different walking speeds, we have found
obvious energy efficiency improvement of the 6-link
robot compared with its 5-link rival, especially at high
walking speeds.
The paper is structured as follows. Section 2
delineates the biped models of both 5-link and 6-link
robots. Section 3 introduces the symmetry outputs
together with the feedback design using optimized
HZD. Section 4 deals with the optimization problem
using B´ezier trajectories with provable stability.
Section 5 presents the optimized walking motions of
the two biped robots at different speeds. Finally,
Section 6 concludes this paper by discussing the
advantage of the additional torso joints and possible
subsequent studies.
2 ROBOT MODELS
2.1 Robot Parameters
Both 5-link robot and 6-link robot have pointed feet
which are not actuated during each step, and the rotor
inertias are the same for all the actuators. As shown
in Figure 2, the 5-link robot analyzed here comprises
one torso, two femurs and two tibiae. We assume
that all links are considered rigid and the motion is
constrained to the sagittal plane.
M
T
I
T
L
T
p
T
M
L
f
p
f
M
M
f
I
f
M
t
I
t
p
t
M
L
t
(x,y)
q
5
q
1
q
2
q
4
q
3
x
y
u
1
u
2
u
3
u
4
x
y
Figure 2: 5-link planar biped robot.
The 6-link robot, depicted in in Figure 3, is
derived from the 5-link robot, and the only difference
is that the additional torso joint divides the torso
into an upper torso and a lower torso. In order to
compare the performance of both robots, the 6-link
robot should be equivalent to its 5-link counterpart
once the additional joint is locked. This is realized
by the following equations
M
T
= M
T1
+ M
T2
(1)
M
T
p
M
T
= M
T1
p
M
T1
+ M
T2
(L
T1
+ p
M
T2
) (2)
I
T
=I
T1
+ M
T1
(p
M
T
− p
M
T1
)
2
+ I
T2
+ M
T2
(p
M
T
− p
M
T2
)
2
(3)
where the notations used above is explained in
Table 1. For the actuators of the femurs and tibiae,
the rotor inertias equal 0.83 kgm
2
, and the motor rotor
inertia of the additional torso joint is 0.2 kgm
2
.
2.2 Dynamic Models
The generalized coordinate vector describing both
biped robots in the sagittal plane is defined as q
e
=
[x,y,q
1
,q
2
,...,q
n
]
′
where n = 5 or 6 equaling the
number of links. It contains two coordinates (x and
y) describing the position of pelvis and n angles q =
[q
1
,q
2
,...,q
n
]
′
for the orientation of legs and torsos.
We assume that the positive angles are anticlockwise.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
214
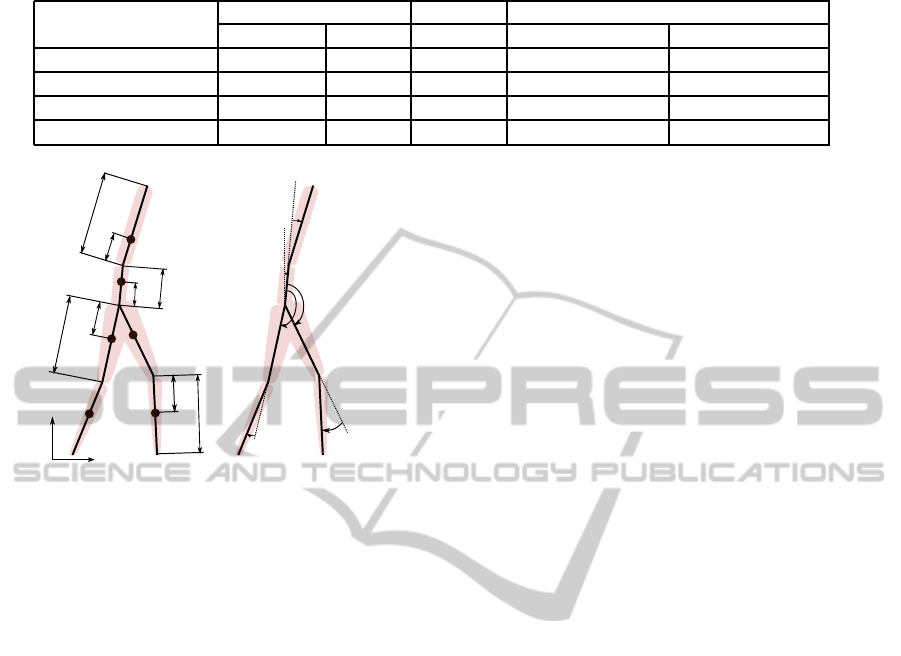
Table 1: Model Parameters for 5-link Robot and 6-link Robot.
Common 5-link 6-link
Model Parameters Femurs(f) Tibia(t) Torso(T) Lower Torso(T1) Upper Torso(T2)
Mass,M
∗
(kg) 6.8 3.2 17.1 10 7.1
Length,L
∗
(m) 0.4 0.4 0.625 0.3 0.325
Inertia,I
∗
(m
2
kg) 0.0693 0.0484 0.562 0.115 0.075
Mass Center,p
M
∗
(m) 0.163 0.127 0.224 0.1 0.1
x
y
M
t
, I
t
p
t
M
L
t
M
f
, I
f
p
f
M
L
f
p
T1
M
L
T1
p
T2
M
L
T2
q
6
q
5
u
5
q
1
u
1
(x,y)
q
3
u
3
u
4
q
4
u
2
q
2
x
y
Figure 3: 6-link planar biped robot.
The dynamic model of the biped robot is divided
into two models: the swing phase model and the
impact model. Using the Euler-Lagrange equations,
one obtains the swing phase models of the form
D(q) ¨q+C(q, ˙q) + G(q) = Bu (4)
where the matrix D is the inertia matrix, C is the
(n × 1) vector of Coriolis terms, G is the (n × 1)
vector of gravity terms, and B maps the joint torques
to generalized forces.
An impact occurs when the swing leg end hits the
ground. We assume that the impact is plastic, and the
relabeling of robot’s coordinates after each impact is
also included in the impact model. Let x = [q, ˙q]
′
be
the state variables of the robot. The impact model can
be formulated as
x
+
= ∆(x
−
) =
∆
q
q
−
∆
˙q
(q
−
) ˙q
−
(5)
where ∆
q
is a relabeling function, ∆
˙q
(q
−
) is a n × n
matrix, x
+
= [q
+
, ˙q
+
]
′
and x
−
= [q
−
, ˙q
−
]
′
(Westervelt
and Grizzle, 2002).
The overall model of walking is obtained by
combining the swing phase model and the impact
model to form a hybrid model. Assuming that the
evolution of the swing phase model possesses finite
left and right limits, one can denote them by x
−
(t) =
lim
τ→t
− x(τ) and x
+
(t) = lim
τ→t
+ x(τ), respectively.
The hybrid model can then be formulated as
Σ :
(
˙x = f(x) + g(x)u x 6∈ S
x
+
= ∆(x
−
) x
−
∈ S
(6)
where S = {(q, ˙q)|h
sw
(q) = 0,dh
sw
(q) ˙q < 0} is the
switching surface.
Converting the dynamic equation (4) to a first
order ODE, f(x) and g(x) can be calculated as
f(x) =
˙q
−D
−1
(q)(C(q, ˙q) + G(q))
(7)
g(x) =
0
5×4
D
−1
B
(8)
3 OUTPUTS AND FEEDBACK
3.1 Symmetry Outputs
Depending on the robot model one chooses, the
dimension of the output equals to (n − 1), and an
almost linear output function can be defined as
y = h(q) = h
0
(q) − h
d
◦ θ(q) (9)
where h
0
(q) represents independent controlled
quantities and h
d
◦ θ(q) represents the ideal evolution
of these quantities as a function of the scalar quantity
θ(q) (Westervelt et al., 2007). θ(q) is a strictly
monotonic function of the robot’s state, and it is
used to replace time in parameterizing periodic biped
motion. If the virtual stance leg is defined as the line
connecting both the stance hip and the stance foot,
then its opposite angle in the sagittal plane will be
monotonically increasing. Since the lengths of the
femurs and the tibiae are equal, θ can be formulated
for both robots as
θ(q) = cq = −q
1
− q
2
/2− q
5
(10)
where the minus signs are adopted to make θ strictly
increasing.
Intuitively, there are two tasks to achieve in
bipedal walking: posture control and swing leg
advancement. Posture control is to maintain the
torso in an almost upright position, while swing leg
advancement deals with commanding the swing leg
to pass beyond the stance leg and ensuring a desired
step length. For a compass gait robot with no ankles
and no knees, the simplest version of posture control
is to maintain torso at some constant value, and
OptimalWalkingofanUnderactuatedPlanarBipedwithSegmentedTorso
215
the simplest version of swing leg advancement is to
command the swing leg to behave as the mirror image
of the stance leg (Grizzle et al., 2001). Inspired by the
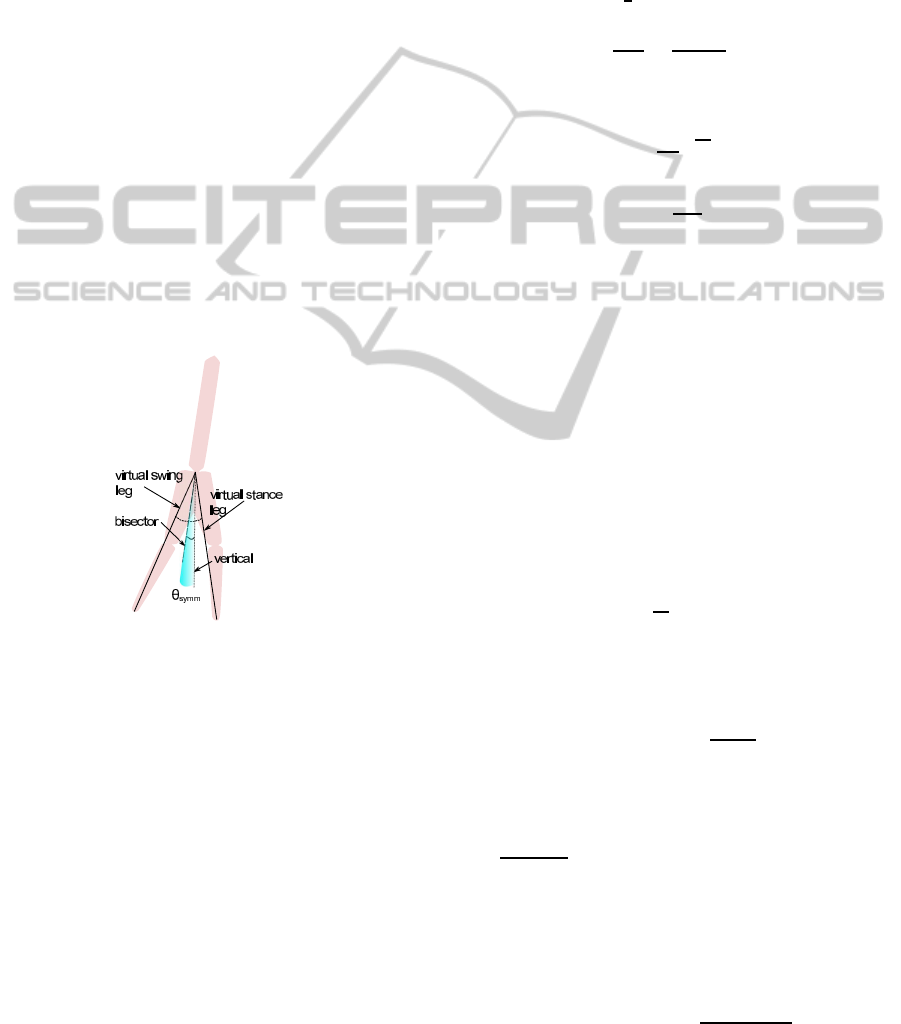
physical interpretation of these methods, we define h
0
of the 5-link robot as follows
h
0
(q) = H
0
q = [θ
symm
,q
2
,q
4
,q
5
]
′
(11)
θ
symm
=q
1
/2+ q
2
/4+ q
3
/2
+ q
4
/4+ q
5
+ π
(12)
where θ
symm
describes the mirror-like behavior of the
virtual swing leg with regard to the virtual stance leg.
As shown in Fig.4, it can be interpreted physically
as the angle between the bisector of virtual swing leg
and virtual stance leg and the gravity direction. q
5
is
the absolute angle of the torso, which is responsible
for posture control. q
2
and q
4
are the angles of the
stance knee and the swing knees. Since the outputs
have the same proportion of quantities from the stance
leg (q
1
, q
2
) and the swing leg (q
3
, q
4
), it is named
as “Symmetry Ouputs”. As for h
d
, its definition is
related to specific feedback designs, which will be
discussed in the next section. For 6-link robot, the
definition of θ
symm
is the same, but h
0
(q) need to be
replaced by [θ
symm
,q
2
,q
4
,q
5
,q
6
]
′
.
Figure 4: Geometric interpretation of symmetry outputs.
3.2 Feedback Design using HZD
Assuming that h
d
is defined by trajectory functions of
θ(q) and the invariance of the impact map is satisfied,
the goal of the feedback design with optimized HZD
is to keep the robot evolution on the zero dynamic
surface. The method of explicitly constructing the
zero dynamics already exists, and we briefly list all
the equations with the same labeling system in the
context of our robot configuration so as to achieve
logical completion (Westervelt et al., 2003). The
following equations can be used in calculating zero
dynamics for both the 5-link robot and the 6-link
robot.
Because of the specific choice of h
0
(q), one can
express the zero dynamics as
ξ
1
= θ(q)
ξ
2
= γ(q, ˙q)
(13)
where θ(q) is defined by (10) and γ(q, ˙q) can be
explicitly computed to be the fifth entry of D(q) ˙q. The
hybrid zero dynamics is originally 2-dimensional, and
it can be equivalent to a 1-dimensional discrete time
dynamical system when the hyperplane ξ
1
= θ
−
1
is
chosen as the Poincar´e section and the coordinate
transformation ζ
2
=
1
2
(ξ
2
)
2
is adopted, yielding
dζ
2
dξ
1
=
κ
2
(ξ
1
)
κ
1
(ξ
1
)
(14)
where κ
1
(ξ
1
) and κ
2
(ξ
1
) are given by
κ
1
(ξ
1
) =
∂θ
∂q
∂h
∂q
γ
0
−1
0
1
Z
(15)
κ
2
(ξ
1
) = −
∂V
∂q
5
Z
(16)
with V(q) the potential energy of the biped, γ
0
= D
5
(the fifth row of D) and ∂V/∂q
5
= G
5
(the fifth row of
G(q)).
The zero dynamic representation enables us to
determine the existence and stability of a fixed point
of the zero dynamics without integrating the ODE
(Westervelt et al., 2007). To begin with, the relation
between ξ
−
2
and ξ
+
2
can be calculated by
ξ
+
2
= δ
zero
ξ
−
2
(17)
where δ
zero
intricately determines the stability of a
limit cycle in the zero dynamics surface and can be
computed in advance as
δ
zero
= γ
0
(q
+
)∆
˙q
(q
−
0
)σ
˙q
(q
−
0
) (18)
σ
˙q
(q
−
0
) =
∂h
∂q
(q
−
0
)
γ
0
(q
−
0
)
−1
0
1
(19)
Thus the potential energy of the zero dynamics (13)
becomes
V
zero
(ξ
1
) = −
Z
ξ
1
θ
+
κ
2
(ξ)
κ
1
(ξ)
dξ (20)
which can determine whether the biped will take a full
step by judging if
δ
2
zero
1− δ
2
zero
V
zero
(θ
−
) + K < 0,(δ
2
zero
6= 0) (21)
where K = maxV
zero
(ξ
1
) with θ
+
≤ ξ
1
≤ θ
−
.
Furthermore, if 0 < δ
zero
< 1 also holds, there
exists an exponentially stable periodic orbit with the
fixed point being
ξ
∗
1
= cq
−
0
|
Ψ
−
p
,ζ
∗
2
=
−V
zero
(θ
−
)
1− δ
2
zero
(22)
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
216

Given ξ
∗
1
and ζ
∗
2
, ξ
2
(ξ
1
,ζ
∗
2
) can be further calculated
by
ξ
2
(ξ
1
,ζ
∗
2
) = −
q
2(δ
2
zero
ζ
∗
2
−V
zero
(ξ
1
)) (23)
Then q(t) and ˙q(t) are given by
q =
H
0
c
−1
h
d
(ξ
1
)
ξ
1
(24)
˙q =
∂h
∂q
γ
0
−1
0
ξ
2
(25)
and the torque u(x) is attained through
u(x) = −(L
g
L
f
h(q, ˙q))
−1
L
2
f
h(q, ˙q) (26)
In addition, t(ξ
2
) can be calculated as
t(ξ
2
) =
Z
θ
−
θ
+
1
κ
1
(ξ
1
)ξ
2
(ξ
1
,ξ
−
2
)
dξ
1
(27)
4 OPTIMAL WALKING MOTION
4.1 Parameterization of h
d
B´ezier polynomials are widely adopted in
parameterizing underactuated biped robots because
they do not display large oscillations with small
parameter variations and they can easily achieve
impact invariance (Westervelt et al., 2007).
To facilitate calculation, we start by normalizing
the previously defined θ(q) as
s(q) =
θ(q) − θ
+
θ
−
− θ
+
(28)
with θ
+
the minimum value of θ(q) and θ
−
the
maximum value of θ(q). Then h
d
◦ θ(q) can be
defined as
h
d
◦ θ(q) = B
Z
◦ s(q) (29)
where B
Z
= [b
1
,...b
n−1
]
′
with n being the number of
links as before. Each b
i
is further defined by
b
i
(s) =
5
∑
k=0
a
i
k
5!
k!(5− k)!
s
k
(1− s)
5−k
(30)
which is a B´ezier polynomial of degree 5. Group the
parameters a
i
k
into vectors as a
k
= (a
1
k
,a
1
k
,...,a
n−1
k
),
and we can calculate a
0
directly from a
5
using
a
0
θ
+
= H∆
q
H
−1
a
5
θ
−
(31)
where H = [H
′
0
,c
′
]
′
. Moreover a
1
can also be
calculated once a
5
and a
4
are available simply by
using
a
1
=
θ
−
− θ
+
5c˙q
+
H
0
˙q
+
+ a
0
(32)
where ˙q
−
= σ
˙q
(q
−
0
) and ˙q
+
= ∆
˙q
(q
−
0
) ˙q
−
.
Thus the parameter set {a
2
,a
3
,a
4
,a
5
} is able to
determine h
d
for both the 5-link and 6-link robot.
For the 5-link robot, the parameter set contains 16
parameters. As for the 6-link robot, the torso has the
tendency to bend down significantly at high walking
speeds, which impairs its resemblance to real human
torsos. In order to avoid excessive curvy torsos, we
assume that the initial shape of the segmented torso is
straight (q
−
6
= 0), meaning that there will be one less
parameter to optimize. Therefore, the parameter set
of the 6-link robot is composed of 19 parameters.
4.2 Cost Function
For the system (6), the output (9) is defined by h
0
,
h
d
and θ as in (10), (11) and (29). The optimization
requires one to find an appropriate cost function. For
biped robots with electrical motors, the major energy
consumption is caused by Joule effect, and thus the
cost function should be proportional to this loss of
energy. It is defined as the integral of the norm of
the torque for a displacement of one meter
C =
1
d
s
Z
T
0
N−1
∑
i=1
(u
∗
i
(t))
2
dt (33)
where T is the step duration, and d
s
corresponds to
step length. The cost function can also be written as
(Westervelt and Grizzle, 2002)
C =
1
d
s
Z
θ
−
θ
+
∑
N−1
i=1
(u
∗
i
(ξ
1
,ξ
2
))
2
κ
1
(ξ
1
)ξ
2
(ξ
1
,ξ
−
2
)
dξ
1
(34)
4.3 Constraints
The constraints in the optimization problem is
adopted to ensure the validity of the optimal
trajectory. For both robot configurations, the
constraints include:
• The ground reaction acting on the stance leg
end should always be larger than 50N, and the
maximum ratio of tangential to normal ground
reaction forces should be less than the friction
coefficient, which is 0.6 in our case.
• The impulsive impact force must be upward and
conform to the friction coefficient. The post-
impact velocity of the swing leg tip is upward.
• The swing leg end must not touch the ground
before the end of one periodic step.
• The existence of a fixed point needs ξ
∗
2
> K/δ
2
zero
and the stability of the fixed point, 0 < δ
2
zero
< 1.
• The average walking speed, v = d/T.
OptimalWalkingofanUnderactuatedPlanarBipedwithSegmentedTorso
217

4.4 Optimization Method
The above procedure can be performed using
MATLAB Optimization toolbox, which provides
different optimization methods such as Nelder-Mead,
sequential quadratic programming (SQP), and active
set. Among them, we have chosen SQP as
our optimization method for its superior capability
in handling the situation where the cost function
cannot provide the criterion due to the violation of
certain constraints such as the constraint ensuring the
existence of a fixed point.
5 RESULT ANALYSIS
As the stability of the hybrid zero dynamics is well
defined, we no longer need to use simulation to prove
the stability of the walking. In order to compare
the energy efficiency between the 5-link robot and
6-link robot, we have run optimization at various
speeds ranging from 0.25m/s to 1.5m/s. As depicted
in Figure 5, the torque costs of the two biped robots
are almost the same at the walking speed from
0.25m/s to 1.2m/s. As the walking speed continues to
increase, the advantage of the 6-link robot in energy
efficiency becomes more and more obvious. The
similar results were also obtained in biped robots with
modest swinging arms, but their method is based on
ZMP theories and thus do not provide solid proof of
stability (Kaddar et al., 2012).
At 1.5m/s, the torque cost of the 6-link robot is
almost 8% less than that of its counterpart. The stick
diagrams of the both robots walking at this speed are
illustrated in Figure 6 and Figure 7 respectively, and
the friction requirementsfor both walking motions are
satisfied according to Figure 8. The torque charts for
0 0.5 1 1.5
0
500
1000
1500
2000
2500
3000
3500
4000
speed [m/s]
criterion [N
2
ms]
5−link 6−link
Figure 5: The torque cost versus walking speed for both
biped robots.
−0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8
0
0.5
1
1.5
Figure 6: The optimal walking motion of the 5-link robot at
1.5m/s.
−0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8
0
0.5
1
1.5
Figure 7: The optimal walking motion of the 6-link robot at
1.5m/s.
all the actuators are shown in Figure 9. We can see
that the gaits of these two robots are quite similar.
As shown in Table 2, the additional torso joint do
consume energy, but on the whole the 6-link robot
is still more energy efficient because of the reduced
torque costs at the other joints, especially at the swing
hip. The angle charts describing the movement of
both robots are shown in Figure 10. We can find
that the fluctuation of q
5
and θ
symm
, for both robots,
is comparatively mild compared with all the other
angles. The intuitive justification for it would be that
the torso rotation is limited during one step and the
virtual swing leg behave approximately as the mirror
image of the virtual stance leg.
6 CONCLUSIONS
The advantage of using a segmented torso instead of a
one-piece torso is studied in this paper. According to
the current optimization results, the 6-link biped robot
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
218

Table 2: Energy Costs at 1.5m/s.
Energy Costs (N
2
ms)
Robot Type Stance Hip Stance Knee Swing Hip Swing Knee Torso Joint Total
5-link 1634 364.7 1579 314.5 - 3893
6-link 1689 266.0 1301 269.2 64.8 3590
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
−50
0
50
100
150
200
250
300
350
Force [N]
Time [s]
F
x
(5−link)
F
y
(5−link)
F
x
(6−link)
F
y
(6−link)
Figure 8: The ground reaction forces versus time.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
−50
0
50
100
150
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
−20
0
20
40
60
Torque [Nm]
u
1
(5−link) u
3
(5−link) u
1
(6−link) u
3
(6−link)
u
2
(5−link) u
4
(5−link) u
2
(6−link) u
4
(6−link)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
0
10
20
30
Time [s]
u
5
(6−link)
Figure 9: The applied torques versus time.
with segmented torso consumes less energy than its
5-link counterpart at high walking speeds, and the
improvement is mainly due to the reduced torque cost
at the swing hip. The results are purely theoretical
since there is no platform capable of testing 6-link
biped with the additional torso joint at present, but
we will try to attain related experimental data in
the future. In addition, there may still be room
for further reducing the energy criterion because the
current hypotheses of the additional torso joint is
still different from the semi passive nature of a real
human torso. Therefore, our future study will focus
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
−2.8
−2.6
−2.4
−2.2
−2
−1.8
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
−0.6
−0.4
−0.2
0
Angle [rad]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
−0.58
−0.56
−0.54
−0.52
−0.5
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
−0.1
0
0.1
0.2
Time [s]
q
1
(5−link) q
3
(5−link) q
1
(6−link) q
3
(6−link)
q
2
(5−link) q
4
(5−link) q
2
(6−link) q
4
(6−link)
q
5
(5−link) q
5
(6−link)
θ
symm
(5−link)
q
6
(6−link)
θ
symm
(6−link)
Figure 10: The angles versus time.
on exploring the effect of a passive segmented torso
on the energy efficiency of walking motion.
ACKNOWLEDGEMENTS
This work was supported by China Scholarship
Council (CSC, No. 201206260112). We would like
to thank Fabian Bauer and Christine Chevallereau for
valuable advises concerning optimization procedures.
REFERENCES
Ames, A. (2012). First steps toward underactuated human-
inspired bipedal robotic walking. In Proceedings
- IEEE International Conference on Robotics and
Automation, pages 1011–1017.
Bauer, F., Fidlin, A., and Seemann, W. (2014).
Energy efficient bipedal robots walking in resonance.
ZAMM - Journal of Applied Mathematics and
Mechanics / Zeitschrift f¨ur Angewandte Mathematik
und Mechanik.
Beletskii, V., Berbyuk, V., and Samsonov, V. (1982).
Parametric optimization of motions of a bipedal
walking robot. Mechanics of solids, 17(1):24–35.
OptimalWalkingofanUnderactuatedPlanarBipedwithSegmentedTorso
219

Cabodevila, G. and Abba, G. (1997). Quasi optimal gait for
a biped robot using genetic algorithm. In Proceedings
of the IEEE International Conference on Systems,
Man and Cybernetics, volume 4, pages 3960–3965.
Chevallereau, C., Abba, G., Aoustin, Y., Plestan, F.,
Westervelt, E., Canudas-de Wit, C., and Grizzle, J.
(2003). Rabit: A testbed for advanced control theory.
IEEE Control Systems Magazine, 23(5):57–79.
Chevallereau, C. and Aoustin, Y. (2001). Optimal reference
trajectories for walking and running of a biped robot.
Robotica, 19(5):557–569.
Grizzle, J., Abba, G., and Plestan, F. (2001).
Asymptotically stable walking for biped robots:
Analysis via systems with impulse effects. IEEE
Transactions on Automatic Control, 46(1):51–64.
Hobon, M., Elyaaqoubi, N., and Abba, G. (2013). Gait
optimization of a rolling knee biped at low walking
speeds. In ICINCO 2013 - Proceedings of the 10th
International Conference on Informatics in Control,
Automation and Robotics, volume 2, pages 207–214.
Kaddar, B., Aoustin, Y., and Chevallereau, C. (2012).
Arms swing effects on a walking planar biped. In
ASME 2012 11th Biennial Conference on Engineering
Systems Design and Analysis, ESDA 2012, volume 3,
pages 293–301.
Martin, A. and Schmiedeler, J. (2012). The effects of curved
foot design parameters on planar biped walking.
In Proceedings of the ASME Design Engineering
Technical Conference, volume 4, pages 815–824.
Mizuuchi, I., Yoshikai, T., Sodeyama, Y., Nakanishi, Y.,
Miyadera, A., Yamamoto, T., Niemel¨a, T., Hayashi,
M., Urata, J., Namiki, Y., Nishino, T., and Inaba, M.
(2006). Development of musculoskeletal humanoid
kotaro. In Proceedings - IEEE International
Conference on Robotics and Automation, volume
2006, pages 82–87.
Rouhollah, J., Louis, L., Aren, H., and Ranjan, M. (2013).
Energy-conserving gaits for point-foot planar bipeds:
A five-dof case study. In ASME 2013 Dynamic
Systems and Control Conference.
Sinnet, R., Powell, M., Shah, R., and Ames, A. (2011).
A human-inspired hybrid control approach to bipedal
robotic walking. In IFAC Proceedings Volumes (IFAC-
PapersOnline), volume 18, pages 6904–6911.
Westervelt, E. and Grizzle, J. (2002). Design of
asymptotically stable walking for a 5-link planar
biped walker via optimization. In Proceedings
- IEEE International Conference on Robotics and
Automation, volume 3, pages 3117–3122.
Westervelt, E., Grizzle, J., and Koditschek, D. (2003).
Hybrid zero dynamics of planar biped walkers. IEEE
Transactions on Automatic Control, 48(1):42–56.
Westervelt, E. R., Grizzle, J. W., Chevallereau, C., Choi,
J. H., and Morris, B. (2007). Feedback Control
of Dynamic Bipedal Robot Locomotion. Taylor &
Francis LLC, first edition.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
220
