
Image Denoising Algorithm with a Three-dimensional Grid System of
Coupled Nonlinear Elements
Atsushi Nomura
1
, Yoshiki Mizukami
2
and Koichi Okada
3
1
Faculty of Education, Yamaguchi University, Yoshida 1677-1, Yamaguchi 753-8513, Japan
2
Graduate School of Science and Engineering, Yamaguchi University, Tokiwadai 2-16-1, Ube 755-8611, Japan
3
Center for the Promotion of Higher Education, Yamaguchi University, Yoshida 1677-1, Yamaguchi 753-8511, Japan
Keywords:
FitzHugh-Nagumo, Coupled Nonlinear Elements, Three-dimensional Grid, Reaction-diffusion, ODE.
Abstract:
This paper presents an image denoising algorithm with a three-dimensional grid system of coupled nonlinear
elements. The system consists of a two-dimensional image grid and a one-dimensional grid representing a
quantized image brightness. At each grid point, a FitzHugh-Nagumo type nonlinear element is placed and
coupled with other elements placed at its nearest neighboring grid points. The FitzHugh-Nagumo element is
described with a set of time-evolving ordinary differential equations, and is tuned to be excitable. When we
externally stimulate the grid system with an image brightness distribution, we could observe that noise in the
distribution was reduced and signal was strengthened as time proceeds. Thus, the image denoising algorithm
utilizes this property of the grid system, in which we propose to modify external stimuli so as to have broad
Gaussian distributions. We confirm performance of the algorithm on artificial and real images in comparison
with two classical algorithms of a diffusion equation and median filtering.
1 INTRODUCTION
Gaussian filtering is a classical and elementary tech-
nique for smoothing and denoising in image pro-
cessing and computer vision (Gonzalez and Woods,
1992). We convolve a Gaussian function with an
image brightness distribution, and obtain its blurred
or smoothed distribution. A diffusion equation gives
the mathematically equal result with Gaussian filter-
ing (Koenderink, 1984). This is because a solution of
the diffusion equation is expressed by a convolution
of a Gaussian function with its initial condition.
There is a trade-off between reducing image noise
and preserving image structures. If we try to reduce
noise with a Gaussian function having a large spatial
spread, we shall obtain much smoothed or fully de-
noised image. However, at the same time Gaussian
filtering removesdetailed structures of the image such
as edges and feature points. Thus, image denoising
algorithms are required to reduce noise as well as to
preserve detailed image structures.
Perona and Malik proposed an image processing
algorithm utilizing a diffusion equation, in which its
diffusion coefficient is anisotropic and is modulated
according to a gradient of an image brightness distri-
bution (Perona and Malik, 1990; Mr´azek and Navara,
2003). They intended to prevent over-smoothing
across image edges. Tomasi and Manduchi proposed
an extension of Gaussian filtering, named ‘bilateral
filtering’ (Tomasi and Manduchi, 1998), which in-
cludes geometric closeness and photometric similar-
ity as the kernel of Gaussian filtering; the classical
Gaussian filtering relies on only the geometric close-
ness. A nonlocal means algorithm (Buades et al.,
2010) is another extension of Gaussian filtering; the
novel point of the algorithm is to utilize windows hav-
ing brightness patterns similar to that of a target win-
dow.
There are several image denoising approaches
such as median filtering (Gonzalez and Woods, 1992;
Eng and Ma, 2001), a total variation approach (Guo
et al., 2011) and a nonlocal approach (Buades et al.,
2010; Dabov et al., 2007; Katkovnik et al., 2010).
The median filtering constructs a histogram on im-
age brightness in a local area, and chooses a mid-
dle brightness level as its representative. The total
variation approach defines a functional taking account
of noise property, derives a Euler-Lagrange type
reaction-diffusion equation, and numerically solves
the equation. The nonlocal approach was devel-
opped from the idea of the nonlocal means algo-
rithm (Buades et al., 2010); see also the review ar-
220
Nomura A., Mizukami Y. and Okada K..
Image Denoising Algorithm with a Three-dimensional Grid System of Coupled Nonlinear Elements.
DOI: 10.5220/0005119302200225
In Proceedings of the 11th International Conference on Signal Processing and Multimedia Applications (SIGMAP-2014), pages 220-225
ISBN: 978-989-758-046-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
ticles (Buades et al., 2010; Katkovnik et al., 2010).
Nomura et al. (2012) proposed a stereo algo-
rithm with a three-dimensional grid system of cou-
pled nonlinear elements. The algorithm success-
fully reconstructs a disparity distribution in the three-
dimensional grid system of the elements externally
stimulated by a similarity measure between stereo
images. In the algorithm, they placed a FitzHugh-
Nagumo type nonlinear excitable element at each
grid point, and coupled neighboring elements. The
three-dimensional grid system approximates to a
three-dimensional FitzHugh-Nagumo type reaction-
diffusion system (FitzHugh, 1961; Nagumo et al.,
1962); a one-dimensional version of the system de-
scribes a pulse propagation phenomenon along nerve
axon, and has a biological background.
Inspired by the previous stereo algorithm (No-
mura et al., 2012) having the biological background,
we propose an image denoising algorithm with the
isotropic three-dimensional grid system of coupled
FitzHugh-Nagumo nonlinear excitable elements. The
novel point of the proposed algorithm lies in the man-
ner of externally stimulating the elements in compar-
ison with the previous stereo algorithm. We apply
the algorithm and two other classical ones to artifi-
cial and real images, and confirm their quantitative
performance.
2 THE ALGORITHM
2.1 FitzHugh-Nagumo Element
A FitzHugh-Nagumo element is described with a set
of equations having two variables of an activator u(t)
and an inhibitor v(t) (FitzHugh, 1961; Nagumo et al.,
1962), as follows:
du
dt
= f(u,v) + µS =
1
ε
[u(u− a)(1− u) − v] + µS,
(1)
dv
dt
= g(u,v) = u− bv, (2)
in which a and b are constants controlling the stability
characteristic of the element, and ε is a small constant
(0 < ε ≪ 1); S is an external stimulus and µ is its
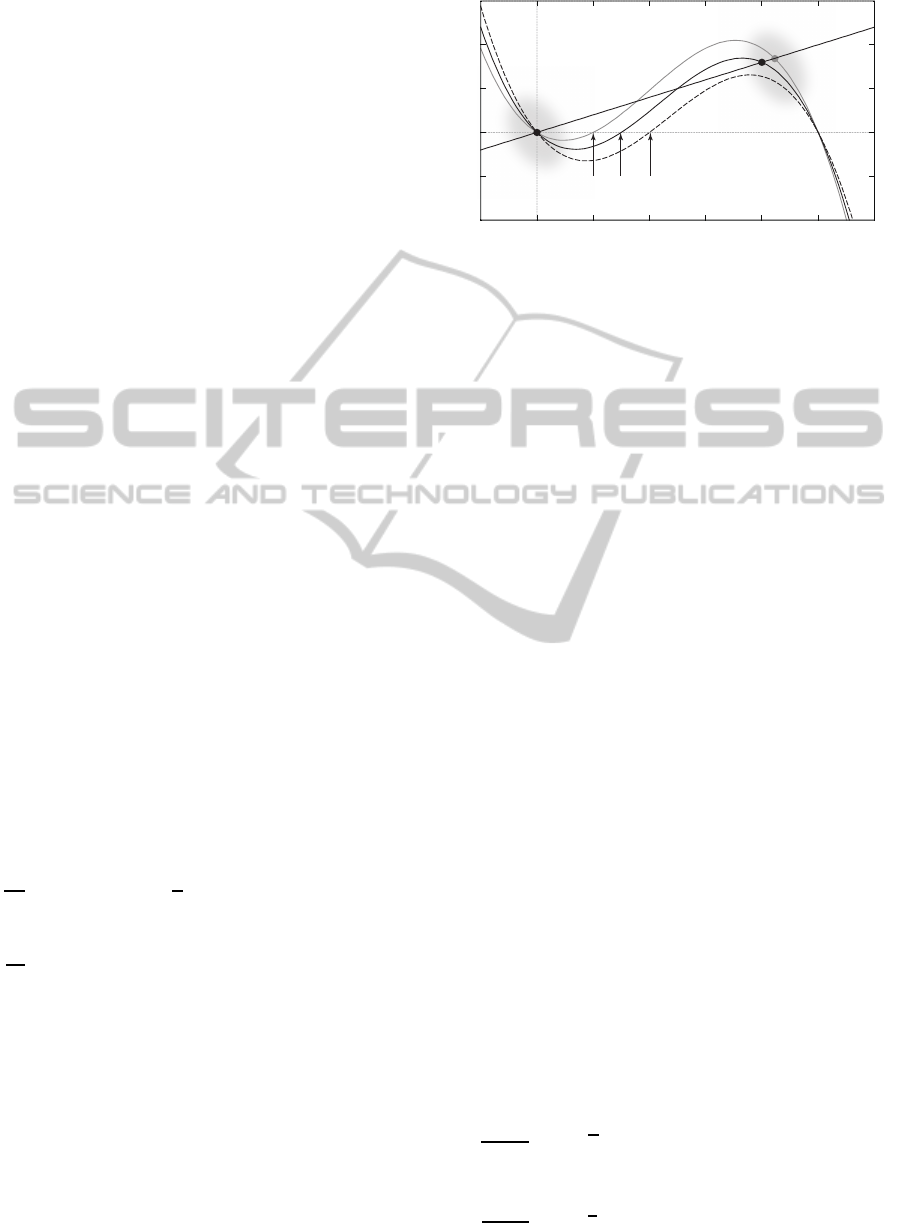
coefficient. Depending on the parameter settings of
a,b and ε under µS = 0, the element becomes mono-
stable or bi-stable, as shown in Fig. 1. For example,
the element becomes bi-stable in the case of a = 0.3
and b = 10; any solution (u, v) converges to either of
the stable points A or B. An excited state refers to the
area having u ≃ 1 around B, and a resting state refers
to the area having u ≃ 0 around A. We can roughly
-0.10
-0.05
0.00
0.05
0.10
0.15
-0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2
a=0.2 a=0.3 a=0.4
u
v
A
B
B’
Excited state
Resting state
f(u,v)=0
g(u,v)=0
Figure 1: Null-clines of f (u,v) = g(u,v) = 0 in a FitzHugh-
Nagumo type nonlinear element of Eqs. (1) and (2) with a =
0.2,0.3,0.4, the fixed b = 10 and µS = 0. The element has
stable steady states denoted by A, B and B’, depending on
the parameter settings; it becomes bi-stable in the cases of
a = 0.2,0.3, and mono-stable in that of a = 0.4. An excited
state refers to the area having u ≃ 1 around B and B’, and a
resting state refers to the area having u ≃ 0 around A.
explain that the parameter a in Eq. (1) is a threshold
level for dividing a state of an element into either of
an excited state or a resting state under the constraint
of v = 0.
2.2 Coupled Elements in a
Three-dimensional Grid
Let I
i, j
be image brightness observed at a point (i, j)
on an image grid X × Y. The image brightness is
quantized into (N + 1) gray levels Z = {0,1,··· ,N}.
Images should satisfy two constraints: uniqueness
and continuity. The uniqueness constraint requires
that a particular image point (i, j) has only one bright-
ness level I
i, j
. The continuity constraint assumes that
neighboring points have the same or similar bright-
ness levels except for boundaries of brightness pat-
terns. These constraints are similar to those of the
stereo vision problem (Nomura et al., 2012). Ran-
domly distributing noise does not satisfy the continu-
ity constraint; an algorithm with the two constraints is
expected to reduce random noise.
A three-dimensional grid system utilized here
consists of (i, j,k) ∈ X × Y × Z, in which coupled
FitzHugh-Nagumo type nonlinear elements having
(u
i, j,k
,v
i, j,k
) are placed at the grid points according to
the manner of Nomura et al. (2012), as follows:
du
i, j,k
dt
= C
u
h
u|
i, j,k
− 6u
i, j,k
i
+ f(u
i, j,k
,v
i, j,k
,a
i, j,k
) + µS
i, j,k
, (3)
dv
i, j,k
dt
= C
v
h
v|
i, j,k
− 6v
i, j,k
i
+ g(u
i, j,k
,v
i, j,k
), (4)
ImageDenoisingAlgorithmwithaThree-dimensionalGridSystemofCoupledNonlinearElements
221

in which
u|
i, j,k
=
∑
(i
′
, j
′
,k
′
)∈ℓ
u
i+i
′
, j+ j
′
,k+k
′
with
ℓ={(−1,0,0),(1,0,0),(0,−1,0),(0,1,0),(0,0,−1),(0,0,1)}.
Note that the neighboring elements are coupled via
both of the activator and inhibitor variables.
A system of the coupled elements has a property
in which an excited state propagates into its neighbor-
ing areas. Thus, we can expect that an area stimulated
by positive µS
i, j,k
becomes an excited state and ex-
tends into its neighboring areas over noise; this prop-
erty works for the continuity constraint. For image
denoising, the system needs to satisfy the unique-
ness constraint, which allows each grid point (i, j) to
have only one brightness level. If a grid point (i, j, k)
has already reached an excited state, the other grid
points (i, j,k
′
), k
′
∈ Z \ {k}, at the same image grid
point (i, j) must be inhibited to reach excited states;
Z \ {k} denotes a set of grid points excluding the
point k in Z. Let us recall that the parameter a in
Eq. (1) is the threshold level which divides a state
of an element into an excited state or a resting state.
Thus, we do not fix the parameter a, but modulate
the parameter depending on states of other grid points
(i, j,k
′
), k
′
∈ Z\ {k}, as follows:
a
i, j,k
= A
0
+
A
2
− A
0
2
×
1+ tanh
max
k
′
∈Z\{k}
u
i, j,k
′
− A
1
, (5)
in which A
0
,A
1
and A
2
are constants and Eq. (5) is
monotonically increasing.
A system of diffusively coupled FitzHugh-
Nagumo elements, that is, a set of FitzHugh-Nagumo
type reaction-diffusion equations simulates a pulse
propagation phenomenon observed along a nerve
axon (FitzHugh, 1961; Nagumo et al., 1962); the
pulse propagation is stable, even if there is a little
noise on the nerve axon. Thus, a set of Eqs. (3) and (4)
with a fixed a
i, j,k
= a and the first order neighborhood
ℓ roughly approximates to the FitzHugh-Nagumo type
reaction-diffusion equations, and has the biological
background of the pulse propagation.
In addition, by imposing the condition of
f(u
i, j,k
,v
i, j,k
) = g(u
i, j,k
,v
i, j,k
) = S
i, j,k
= 0 on Eqs. (3)
and (4), we obtain an approximated discrete version
of two diffusion equations. An algorithm of Gaussian
filtering is realized with a two-dimensional version of
either Eqs. (3) or (4) under the condition.
Temporal discretization of Eqs. (3) and (4) pro-
vides a set of linear equations. With appropriate ini-
tial conditions and boundary ones on the two variables
i,j
i+1,j
i-1,j
k
I
i-1,j
I
i+1,j
I
i,j
S
i+1,j,I
i+1,j
S
i,j,I
i,j
S
i-1,j,I
i-1,j
noise
I
i-1,j
I
i+1,j
I
i,j
S
i+1,j,I
i+1,j
S
i,j,I
i,j
S
i-1,j,I
i-1,j
k
noise
(a) (b)
Figure 2: External stimuli S
i, j,k
for the proposed algorithm
in a situation of a noise-perturbed image brightness distri-
bution I
i, j
; the image brightness I
i, j
is perturbed with a noise
at an image point (i, j). Figure (a) shows three external
stimuli with S
i−1, j,k
= δ(k − I
i−1, j
),S
i, j,k
= δ(k − I
i, j
) and
S
i+1, j,k
= δ(k−I
i+1, j
), in which δ(·) denotes the delta func-
tion. Figure (b) shows three external stimuli proposed with
Eq. (6).
(u
i, j,k
,v
i, j,k
), we can numerically compute temporal
developments of the two variables.
2.3 External Stimuli
Now, we propose a manner of externally stimulat-
ing each element in the grid system. Let us con-
sider a situation in which an image point is perturbed
with noise and its surrounding points are not. If the
delta function is employed as S
i, j,k
= δ(k − I
i, j
), the
noise prevents two adjacent image grid points with the
same brightness level from strengthening each other
through Eq. (3), as shown in Fig. 2(a). Thus, this pa-
per proposes to employ the following external stimu-
lus
S
i, j,k
= exp
−
(k− I
i, j
)
2
σ
2
(6)
so as to give the stimulus more widely along the k-
direction as shown in Fig. 2(b); σ in Eq.(6) denotes
the width of the Gaussian.
Initial conditions for u
i, j,k
and v
i, j,k
are set to zero
at all points (i, j,k) ∈ X × Y × Z. A zero-gradient
boundary condition governs borders of the grid sys-
tem X× Y× Z.
After finite duration of time (0 < t ≤ L
t
), the algo-
rithm creates a denoised image
I
∗
i, j
= argmax
k∈Z
u
i, j,k
(7)
Algorithm 1 gives a pseudo code of the algorithm.
3 EXPERIMENTAL RESULTS
We applied three image denoising algorithms to arti-
ficial and real images, and evaluated their results. The
three algorithms were as follows: the proposed algo-
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
222
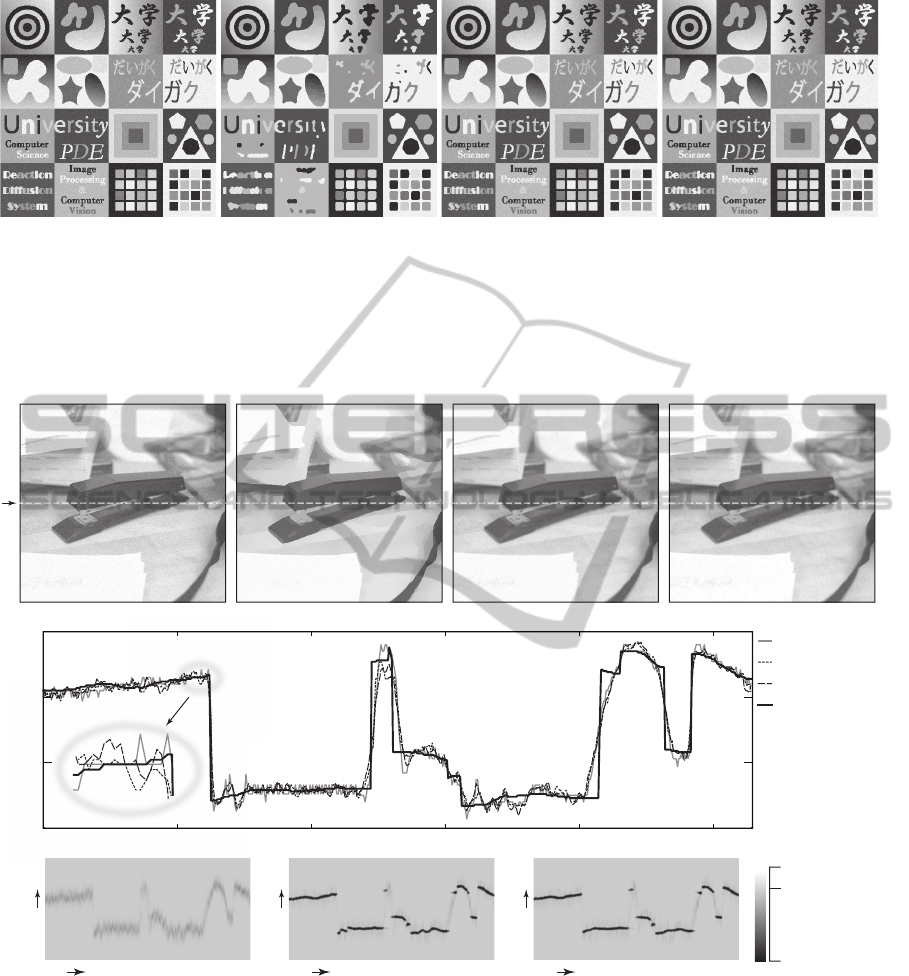
(a) (b) (c) (d)PSNR=28.2 dB PSNR=20.2 dB PSNR=29.2 dB PSNR=27.7 dB
Figure 3: Experimental results of image denoising with the proposed algorithm, a diffusion algorithm and median filtering on
an artificial image. Figure (a) shows the artificial image (500×500 pixels and 256 brightness levels) with an additive Gaussian
noise of the standard deviation 10 and zero-average [see Ref. (Nomura et al., 2011) for the original artificial image without
noise]. Figure (b) shows a result obtained by the proposed algorithm at t = 10 with the parameter setting of C
u
= 25,C
v
=
100,A
0
= 0.07,A
1
= 0.7,A
2
= 0.5,b = 10,ε = 1.0× 10
−2
,∆t = 1/100 and σ = 10. Figure (c) shows a result obtained by the
diffusion algorithm at t = 0.04 with the parameter setting of C
u
= 2.5 and ∆t = 1/100. Figure (d) shows a result obtained by
the median filtering with a local area of 5× 5 pixels. Each figure has a value evaluated by the measure PSNR.
(e)
(a) (b) (c) (d)
PSNR=28.7 dB PSNR=30.5 dB PSNR=35.4 dB PSNR=35.3 dB
PSNR=28.7 dB
50
100
150
200
0
100 200 300 400 500
i
I
i,j=255
Original image
Median filter
Diffusion
Proposed
j=255
u
-0.3
1.0
0.0
(f)
t=0.1
i0 528
k
0
255
t=1.0
k
0
255
i0 528
t=5.0
k
0
255
i0 528
Figure 4: Experimental results of image denoising with the proposed algorithm, a diffusion algorithm and median filtering
on a real image provided on a website (Heath et al., 2014). Figure (a) shows the real image (529 × 510 pixels and 256
brightness levels) with an additive Gaussian noise of the standard deviation 10 and zero-average. Figure (b) shows a result
obtained by the proposed algorithm at t = 10 with the same parameter setting as that of Fig. 3(b). Figure (c) shows a result
obtained by the diffusion algorithm at t = 0.24 with the same parameter setting as that of Fig. 3(c). Figure (d) shows a result
obtained by the median filtering with a local area of 3× 3 pixels. Each of Figs. (a)∼(d) has a value evaluated by the measure
PSNR. Figure (e) shows one-dimensional profiles I
i, j=255
of the brightness distributions of the original image and the results
shown in Figs. (b)∼(d); the profiles around i = 110 are enlarged for more detailed confirmation. Figure (f) shows temporal
developments of a two-dimensional distribution u
i, j=255,k
obtained at t = 0.1,1.0,5.0 by the proposed algorithm; a gray level
shows the distribution u
i, j=255,k
, and thus black areas indicate excited states of elements. The maximum value at each image
point (i, j) along the direction k is chosen, and its k value denotes the brightness level of the denoised image [see Eq. (7)].
ImageDenoisingAlgorithmwithaThree-dimensionalGridSystemofCoupledNonlinearElements
223
Algorithm 1 : Proposed image denoising algorithm, in
which Eqs. (3) and (4) are discretized with a finite time-
difference ∆t for their numerical computation.
1: for all (i, j) ∈ X× Y do
2: for all k ∈ Z do
3: S
i, j,k
← exp
−
(k−I
i, j
)
2
σ
2
⊲ Eq.( 6)
4: u
n=0
i, j,k
← 0, v
n=0
i, j,k
← 0 ⊲ Initial conditions.
5: end for
6: end for
7: n ← 0
8: while n < L
t
/∆t do
9: for all (i, j,k) ∈ X× Y× Z do
10: Compute u
n+1
i, j,k
,v
n+1
i, j,k
. ⊲ Eqs. (3)∼(5)
11: end for
12: n ← n + 1
13: end while
14: for all (i, j) ∈ X× Y do
15: I
∗
i, j
← argmax
k∈Z
u
n
i, j,k
⊲ Eq. (7)
16: end for
rithm, a diffusion algorithm and median filtering. The
diffusion algorithm utilizes a simple diffusion equa-
tion with the initial condition of an image brightness
distribution. The median filtering has a local area in
which the median of brightness values is chosen as the
representativebrightness value (Gonzalez and Woods,
1992).
The following peak-signal-to-noise-ratio (PSNR)
evaluates image quality, as follows:
PSNR = 10log
10
"
N
2
|X× Y|
∑
(i, j)∈X×Y
(I
t
i, j
− I
o
i, j
)
2
#
[dB],
(8)
in which I
t
i, j
denotes the original image without noise,
I
o
i, j
denotes an image for quality assessment, and |X×
Y| denotes the image size.
Figure 3 shows results of image denoising on an
artificial image with an additive Gaussian noise. Ac-
cording to the measure PSNR, the diffusion algorithm
achieved the best performance of 29.2 dB, which is
better than the level of PSNR = 28.2 dB measured on
the input image, and performance of the other two al-
gorithms was worse than the level of the input image.
Figure 4 shows results of image denoising on an
image generated by adding a Gaussian noise to a
real photo image (Heath et al., 2014). According to
the measure PSNR, the two algorithms of the dif-
fusion algorithm and the median filtering achieved
almost the same performance of about 35 dB, and
the proposed algorithm gave 30.5 dB which is bet-
ter than the quality of the input image 28.7 dB of
Fig. 4(a). For more detailed confirmation on the re-
15
20
25
30
35
40
0.1
1.0 10
PSNR [dB]
t
(d)Diffusion algorithm
applied to the real image
(c)Diffusion algorithm
applied to the artificial image
(b)Proposed algorithm
applied to the real image
(a)Proposed algorithm
applied to the artificial image
0.01 0.1 1.0
(a) ,(b)
(c) ,(d)
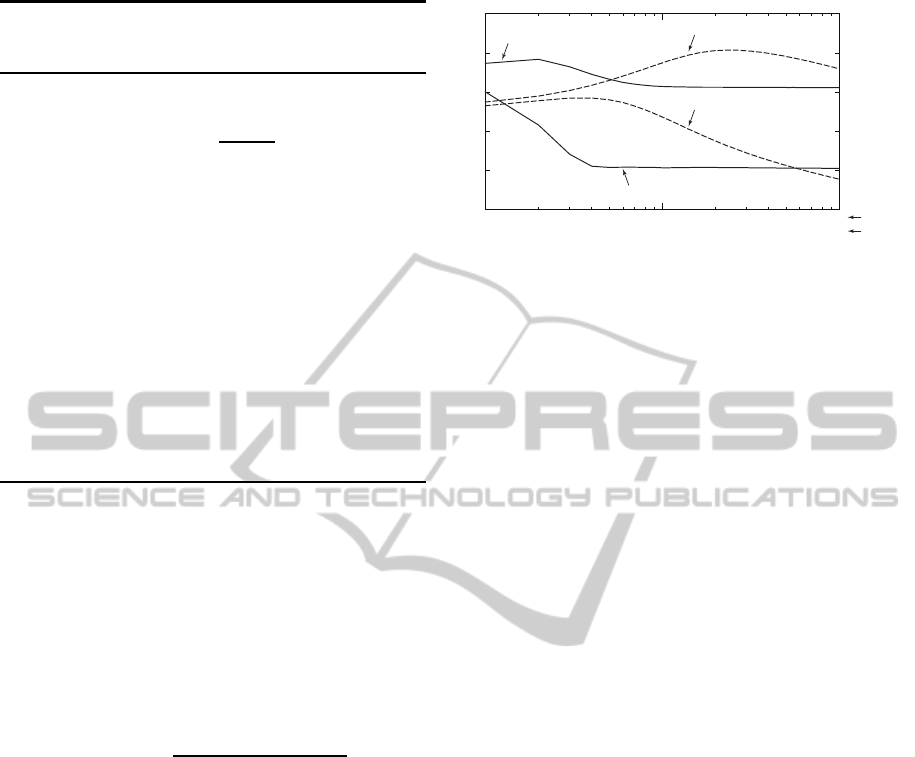
Figure 5: Image denoising processes evaluated by the mea-
sure PSNR. Curves (a) and (b) show results of the proposed
algorithm applied to the artificial and real images (see Figs 3
and 4). Curves (c) and (d) show results of the diffusion al-
gorithm applied to the same artificial and real images; the
algorithm achieved the best performance at t = 0.04 on the
artificial image, and at t = 0.24 on the real image. Note that
a time scale for (a) and (b) is different from that for (c) and
(d).
sults, Fig. 4(e) shows one-dimensional profiles of im-
age brightness distributions at the center (j = 255) in
the images of Figs. 4(a)∼(d). Figure 4(f) shows the
temporal developments of a two-dimensional distri-
bution u
i, j=255,k
, (i,k) ∈ X × Z obtained at three dif-
ferent time instances.
Figure 5 shows temporal changes of the measures
PSNR evaluating image denoising processes of the
proposed algorithm and the diffusion one. The mea-
sures show that the algorithm mostly converged at
t = 1.0 on both the artificial and real images, and the
diffusion algorithm did not converged in the range of
0 < t ≤ 10.
Let us discuss the above experimental results. The
proposed algorithm reduced noise with preserving
edges, as shown around i = 110 ∼ 120 in Fig. 4(e).
Fig. 4(f) demonstrates the process in which the al-
gorithm dynamically connected neighboring areas on
the i− k grid. In contrast to these successful results,
the proposed algorithm failed to preserve image de-
tails in Fig. 3(b), and created step-wise brightness dis-
tributions in the areas having high gradients in im-
age brightness distributions, for example, as shown
around i = 410 in Fig. 4(e). Figure 4(f) shows that the
proposed algorithm failed to obtain continuity in the
corresponding high gradient areas of the brightness.
We need to develop the algorithm so as to preserve
image details and simultaneously to support the con-
tinuity in the high gradient areas; we believe that how
to choose the width σ adaptivelyis a key point to solve
these problems.
Performance of the diffusion algorithm highly de-
pends on the stopping time, as shown in Fig. 5;
this is known as the stopping time evaluation prob-
SIGMAP2014-InternationalConferenceonSignalProcessingandMultimediaApplications
224

lem (Mr´azek and Navara, 2003). The proposed al-
gorithm converges in enough duration of time. This
is because the FitzHugh-Nagumo type nonlinear ex-
citable element has one or two stable steady state(s),
and convergence of the uncoupled element is guaran-
teed (Murray, 1989).
4 CONCLUSION
This paper presented an image denoising algorithm,
which consists of a three-dimensional grid system of
coupled FitzHugh-Nagumo type nonlinear excitable
elements. In particular, each element is externally
stimulated so as to fit the grid system to the task of
image denoising. The PSNR measure evaluated per-
formance of the algorithm in comparison with the two
other classical algorithms of a diffusion equation and
median filtering on artificial and real images. As the
results, although the overall performance of the pro-
posed algorithm did not achieve that of the other ones,
it successfully recovered image brightness distribu-
tions around edges as well as reducing noise. We be-
lieve that this is a merit of the proposedalgorithm hav-
ing nonlinearlity in comparison with the other ones.
The convergence of the proposed algorithm was nu-
merically confirmed.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI Grant
Number 26330276.
REFERENCES
Buades, A., Coll, B., and Morel, J. M. (2010). Image de-
noising methods. A new nonlocal principle. SIAM Re-
view, 52:113–147.
Dabov, K., Foi, A., Katkovnik, V., and Egiazarian, K.
(2007). Image denoising by sparse 3-d transform-
domain collaborative filtering. IEEE Transactions on
Image Processing, 16:2080–2095.
Eng, H.-L. and Ma, K.-K. (2001). Noise adaptive soft-
switching median filter. IEEE Transactions on Image
Processing, 10:242–251.
FitzHugh, R. (1961). Impulses and physiological states in
theoretical models of nerve membrane. Biophysical
Journal, 1:445–466.
Gonzalez, R. C. and Woods, R. E. (1992). Digital Image
Processing. Addison-Wesley, New York, USA.
Guo, Z., Liu, Q., Sun, J., and Wu, B. (2011). Reaction-
diffusion systems with p(x)-growth for image denois-
ing. Nonlinear Analysis: Real World Applications,
12:2904–2918.
Heath, M., Sarkar, S., Sanocki, T., and Bowyer,
K. (confirmed on June 1st, 2014). Edge
detector comparison. Available from:
http://marathon.csee.usf.edu/edge/edge
detection.html.
Katkovnik, V., Foi, A., Egiazarian, K., and Astola, J.
(2010). From local kernel to nonlocal multiple-model
image denoising. International Journal of Computer
Vision, 86:1–32.
Koenderink, J. J. (1984). The structure of images. Biologi-
cal Cybernetics, 50:363–370.
Mr´azek, P. and Navara, M. (2003). Selection of optimal
stopping time for nonlinear diffusion filtering. Inter-
national Journal of Computer Vision, 52:189–203.
Murray, J. D. (1989). Mathematical Biology. Springer-
Verlag, Berlin, Germany.
Nagumo, J., Arimoto, S., and Yoshizawa, S. (1962). An
active pulse transmission line simulating nerve axon.
Proceedings of the IRE, 50:2061–2070.
Nomura, A., Ichikawa, M., Okada, K., Miike, H., and Saku-
rai, T. (2011). Edge detection algorithm inspired by
pattern formation processes of reaction-diffusion sys-
tems. International Journal of Circuits, Systems and
Signal Processing, 5:105–115.
Nomura, A., Okada, K., Mizukami, Y., Miike, H., Ichikawa,
M., and Sakurai, T. (2012). Subpixel stereo dis-
parity for surface reconstruction by utilising a three-
dimensional reaction-diffusion system. In Proceed-
ings of the 27th Image and Vision Computing New
Zealand Conference, pages 144–149, Dunedin, New
Zealand.
Perona, P. and Malik, J. (1990). Scale-space and edge de-
tection using anisotropic diffusion. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
12:629–639.
Tomasi, C. and Manduchi, R. (1998). Bilateral filtering for
gray and color images. In Proceedings of the 1998
IEEE International Conference on Computer Vision,
pages 839–846, Bombay, India.
ImageDenoisingAlgorithmwithaThree-dimensionalGridSystemofCoupledNonlinearElements
225
